AT32的freertos下modbus TCP移植
1.准备模板
打开雅特力官网,也就是带有LwIP的示例。
下载官方源码:modbus
2.移植
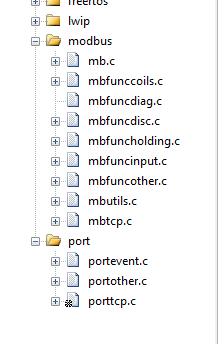
我这里是在这里新建两个文件夹,分别是modbus与port,这个任意,只需要将必要的文件加入项目即可。
将源码中的modbus这些都移植过来,分别是实现,头文件、以及tcp相关的文件。其余的就不需要了
port文件夹里为:源码->demo->MCF5235TCP->port。
接下来将这些文件加入工程。加入头文件
编译后,发现有12个错误
3.依次解决:
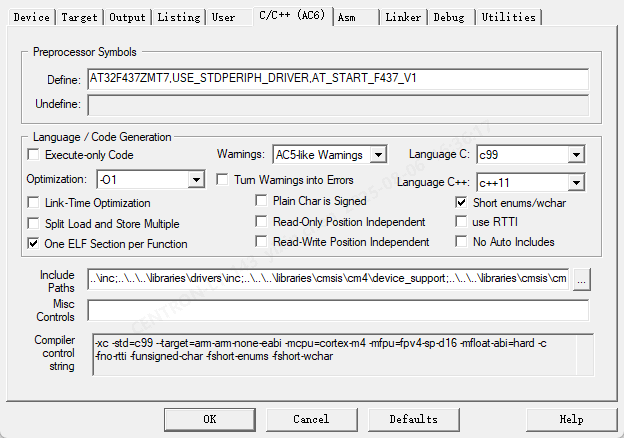
1.打开mbconfig.h
确保 ,我是本来就这样,所以可能就只有12个错误,如果不是这样可能之前编译的错误更多。
,我是本来就这样,所以可能就只有12个错误,如果不是这样可能之前编译的错误更多。
2.打开port.h
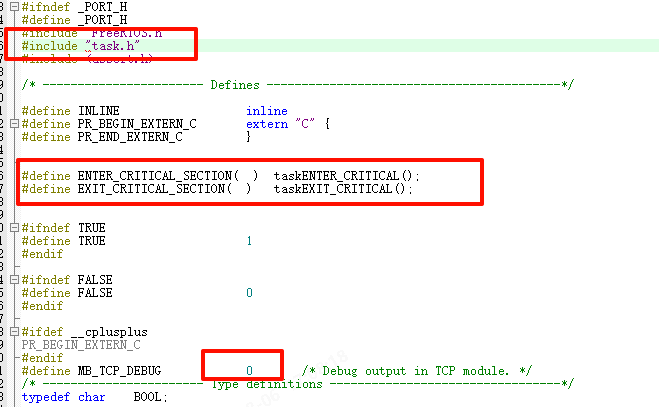
这里我就关闭tcp_debug了。
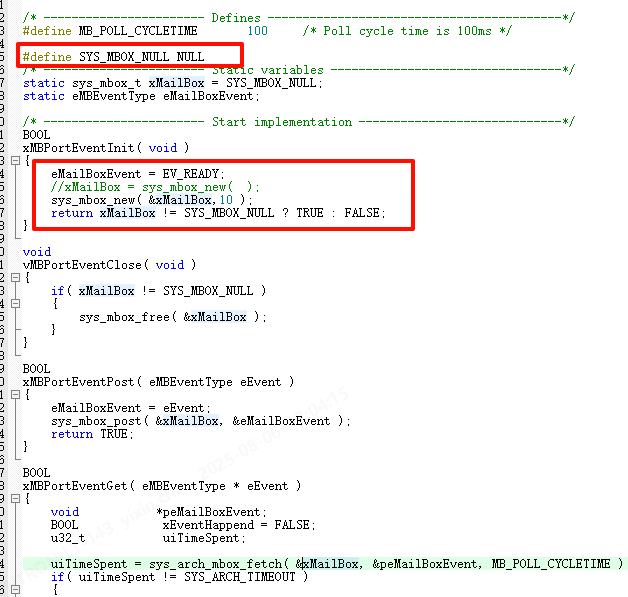
3.打开portevent.c
没有定义,自己定义一下,然后这里的sys_mbox_ne()这个函数定义已经发生了改变。按照途中修改,后续报警的xMailBox加上&符号,
4.打开portother.c
删掉多余的这个三个
编译,发现还有五个错误
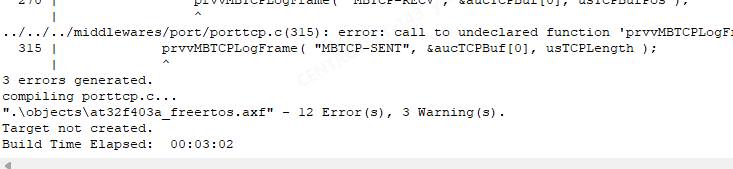
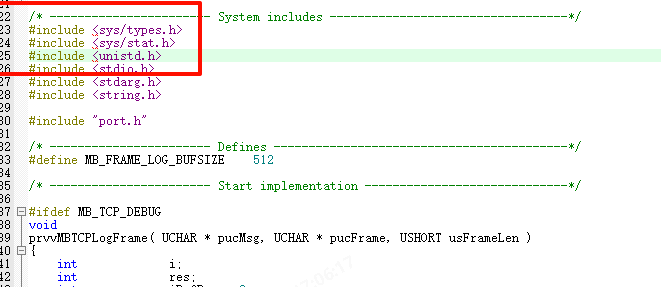
1.打开porttcp.c
报错说没有memcpy,那么我们加入头文件
还有这个错误,我们ctrl+h寻找,发现定义在portother.c文件里

复制并放在port.h中:
2.突然又发现少个宏定义,很离谱,我之前移植的时候没有少过
是这个宏

拷贝,并放到mbconfig.h文件中:
#ifndef MB_ASCII_TIMEOUT_WAIT_BEFORE_SEND_MS
#define MB_ASCII_TIMEOUT_WAIT_BEFORE_SEND_MS ( 0 )
#endif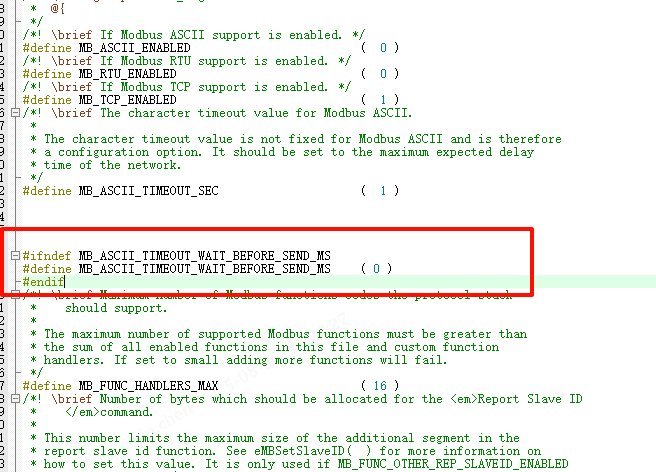
不过我记得我之前没有这个问题。
再次编译:
我出现了以下五个错误

我的main.c为:
/***************************************************************************** @file main.c* @version v2.0.6* @date 2022-03-11* @brief main program*************************************************************************** Copyright notice & Disclaimer** The software Board Support Package (BSP) that is made available to * download from Artery official website is the copyrighted work of Artery. * Artery authorizes customers to use, copy, and distribute the BSP * software and its related documentation for the purpose of design and * development in conjunction with Artery microcontrollers. Use of the * software is governed by this copyright notice and the following disclaimer.** THIS SOFTWARE IS PROVIDED ON "AS IS" BASIS WITHOUT WARRANTIES,* GUARANTEES OR REPRESENTATIONS OF ANY KIND. ARTERY EXPRESSLY DISCLAIMS,* TO THE FULLEST EXTENT PERMITTED BY LAW, ALL EXPRESS, IMPLIED OR* STATUTORY OR OTHER WARRANTIES, GUARANTEES OR REPRESENTATIONS,* INCLUDING BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY,* FITNESS FOR A PARTICULAR PURPOSE, OR NON-INFRINGEMENT.****************************************************************************/#include "at32f435_437_board.h"
#include "at32f435_437_clock.h"
#include "at32_emac.h"
#include "stdio.h"
#include "FreeRTOS.h"
#include "task.h"#include "lwip/api.h"
#include "lwip/sys.h"
/*FreeModBus*/
#include "mb.h"
#include "mbutils.h"/* ----------------------- Defines ------------------------------------------*/
#define PROG "FreeModbus"//输入寄存器起始地址
#define REG_INPUT_START 0x0000
//输入寄存器数量
#define REG_INPUT_NREGS 8
//保持寄存器起始地址
#define REG_HOLDING_START 0x0000
//保持寄存器数量
#define REG_HOLDING_NREGS 8//线圈起始地址
#define REG_COILS_START 0x0000
//线圈数量
#define REG_COILS_SIZE 16//开关寄存器起始地址
#define REG_DISCRETE_START 0x0000
//开关寄存器数量
#define REG_DISCRETE_SIZE 16/* Private variables ---------------------------------------------------------*/
//输入寄存器内容
uint16_t usRegInputBuf[REG_INPUT_NREGS] = {0x1000,0x1001,0x1002,0x1003,0x1004,0x1005,0x1006,0x1007};
//输入寄存器起始地址
uint16_t usRegInputStart = REG_INPUT_START;//保持寄存器内容
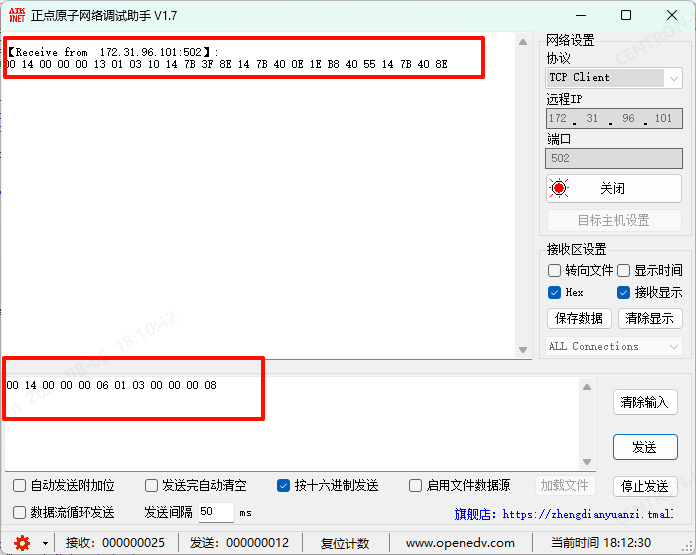
uint16_t usRegHoldingBuf[REG_HOLDING_NREGS] = {0x147b,0x3f8e,0x147b,0x400e,0x1eb8,0x4055,0x147b,0x408e};
//保持寄存器起始地址
uint16_t usRegHoldingStart = REG_HOLDING_START;//线圈状态
uint8_t ucRegCoilsBuf[REG_COILS_SIZE / 8] = {0x0f,0x02};
//开关输入状态
uint8_t ucRegDiscreteBuf[REG_DISCRETE_SIZE / 8] = {0x0f,0x02};
/** @addtogroup UTILITIES_examples* @{*//*开始任务*/
TaskHandle_t StartTask_Handler;
void start_task(void *pvParameters);
/** @addtogroup FreeRTOS_demo* @{*/
extern void tcpip_stack_init(void);
extern void udpecho_init(void);
extern void tcpecho_init(void);TaskHandle_t network_handler;/* led3 task */
void network_task_function(void *pvParameters);/*** @brief main function.* @param none* @retval none*/
int main(void)
{nvic_priority_group_config(NVIC_PRIORITY_GROUP_4);system_clock_config();/* init led2*/at32_led_init(LED2);/* init led3*/at32_led_init(LED3);/* init led4*/at32_led_init(LED4);/* init usart1 */uart_print_init(115200);/* enter critical */taskENTER_CRITICAL(); if(xTaskCreate((TaskFunction_t )network_task_function, (const char* )"Network_task", (uint16_t )512, (void* )NULL,(UBaseType_t )2,(TaskHandle_t* )&network_handler) != pdPASS){printf("Network task could not be created as there was insufficient heap memory remaining.\r\n");} else{printf("Network task was created successfully.\r\n");}/* exit critical */ taskEXIT_CRITICAL(); /* start scheduler */ vTaskStartScheduler(); }static void modbustcp_thread(void *arg)
{ LWIP_UNUSED_ARG(arg);eMBErrorCode xStatus;eMBTCPInit( MB_TCP_PORT_USE_DEFAULT );eMBEnable();while(1){eMBPoll();vTaskDelay(5);}/* An error occured. Maybe we can restart. */
// ( void )eMBDisable( );
// ( void )eMBClose( );//}
}void modbustcp_init(void)
{sys_thread_new("modbustcp_thread", modbustcp_thread, NULL, 512, 4);
}/* led3 task function */
void network_task_function(void *pvParameters)
{while(emac_system_init() == ERROR);tcpip_stack_init();modbustcp_init();taskENTER_CRITICAL(); //进入临界区vTaskDelete(StartTask_Handler); //删除开始任务taskEXIT_CRITICAL(); //退出临界区
}/*** @}*/ /****************************************************************************
* 名 称:eMBRegInputCB
* 功 能:读取输入寄存器,对应功能码是 04 eMBFuncReadInputRegister
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNRegs: 要读取的寄存器个数
* 出口参数:
* 注 意:上位机发来的 帧格式是: SlaveAddr(1 Byte)+FuncCode(1 Byte)
* +StartAddrHiByte(1 Byte)+StartAddrLoByte(1 Byte)
* +LenAddrHiByte(1 Byte)+LenAddrLoByte(1 Byte)+
* +CRCAddrHiByte(1 Byte)+CRCAddrLoByte(1 Byte)
* 3 区
****************************************************************************/
eMBErrorCode
eMBRegInputCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs )
{eMBErrorCode eStatus = MB_ENOERR;int iRegIndex;/* it already plus one in modbus function method. */usAddress--;if( ( usAddress >= REG_INPUT_START )&& ( usAddress + usNRegs <= REG_INPUT_START + REG_INPUT_NREGS ) ){iRegIndex = ( int )( usAddress - usRegInputStart );while( usNRegs > 0 ){*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] >> 8 );*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] & 0xFF );iRegIndex++;usNRegs--;}}else{eStatus = MB_ENOREG;}return eStatus;
}/****************************************************************************
* 名 称:eMBRegHoldingCB
* 功 能:对应功能码有:06 写保持寄存器 eMBFuncWriteHoldingRegister
* 16 写多个保持寄存器 eMBFuncWriteMultipleHoldingRegister
* 03 读保持寄存器 eMBFuncReadHoldingRegister
* 23 读写多个保持寄存器 eMBFuncReadWriteMultipleHoldingRegister
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNRegs: 要读写的寄存器个数
* eMode: 功能码
* 出口参数:
* 注 意:4 区
****************************************************************************/
eMBErrorCode
eMBRegHoldingCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs, eMBRegisterMode eMode )
{eMBErrorCode eStatus = MB_ENOERR;int iRegIndex;/* it already plus one in modbus function method. */usAddress--;if((usAddress >= REG_HOLDING_START)&&\((usAddress+usNRegs) <= (REG_HOLDING_START + REG_HOLDING_NREGS))){iRegIndex = (int)(usAddress - usRegHoldingStart);switch(eMode){ case MB_REG_READ://读 MB_REG_READ = 0while(usNRegs > 0){*pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] >> 8); *pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] & 0xFF); iRegIndex++;usNRegs--; } break;case MB_REG_WRITE://写 MB_REG_WRITE = 0while(usNRegs > 0){ usRegHoldingBuf[iRegIndex] = *pucRegBuffer++ << 8;usRegHoldingBuf[iRegIndex] |= *pucRegBuffer++;iRegIndex++;usNRegs--;} }}else//错误{eStatus = MB_ENOREG;} return eStatus;
}extern void xMBUtilSetBits( UCHAR * ucByteBuf, USHORT usBitOffset, UCHAR ucNBits,UCHAR ucValue );
extern UCHAR xMBUtilGetBits( UCHAR * ucByteBuf, USHORT usBitOffset, UCHAR ucNBits );
/****************************************************************************
* 名 称:eMBRegCoilsCB
* 功 能:对应功能码有:01 读线圈 eMBFuncReadCoils
* 05 写线圈 eMBFuncWriteCoil
* 15 写多个线圈 eMBFuncWriteMultipleCoils
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 线圈地址
* usNCoils: 要读写的线圈个数
* eMode: 功能码
* 出口参数:
* 注 意:如继电器
* 0 区
****************************************************************************/
eMBErrorCode
eMBRegCoilsCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNCoils,eMBRegisterMode eMode )
{//错误状态eMBErrorCode eStatus = MB_ENOERR;//寄存器个数int16_t iNCoils = ( int16_t )usNCoils;//寄存器偏移量int16_t usBitOffset;/* it already plus one in modbus function method. */usAddress--;//检查寄存器是否在指定范围内if( ( (int16_t)usAddress >= REG_COILS_START ) &&( usAddress + usNCoils <= REG_COILS_START + REG_COILS_SIZE ) ){//计算寄存器偏移量usBitOffset = ( int16_t )( usAddress - REG_COILS_START );switch ( eMode ){//读操作case MB_REG_READ:while( iNCoils > 0 ){*pucRegBuffer++ = xMBUtilGetBits( ucRegCoilsBuf, usBitOffset,( uint8_t )( iNCoils > 8 ? 8 : iNCoils ) );iNCoils -= 8;usBitOffset += 8;}break;//写操作case MB_REG_WRITE:while( iNCoils > 0 ){xMBUtilSetBits( ucRegCoilsBuf, usBitOffset,( uint8_t )( iNCoils > 8 ? 8 : iNCoils ),*pucRegBuffer++ );iNCoils -= 8;}break;}}else{eStatus = MB_ENOREG;}return eStatus;
}/****************************************************************************
* 名 称:eMBRegDiscreteCB
* 功 能:读取离散寄存器,对应功能码有:02 读离散寄存器 eMBFuncReadDiscreteInputs
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNDiscrete: 要读取的寄存器个数
* 出口参数:
* 注 意:1 区
****************************************************************************/
eMBErrorCode
eMBRegDiscreteCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNDiscrete )
{//错误状态eMBErrorCode eStatus = MB_ENOERR;//操作寄存器个数int16_t iNDiscrete = ( int16_t )usNDiscrete;//偏移量uint16_t usBitOffset;/* it already plus one in modbus function method. */usAddress--; //判断寄存器时候再制定范围内if( ( (int16_t)usAddress >= REG_DISCRETE_START ) &&( usAddress + usNDiscrete <= REG_DISCRETE_START + REG_DISCRETE_SIZE ) ){//获得偏移量usBitOffset = ( uint16_t )( usAddress - REG_DISCRETE_START );while( iNDiscrete > 0 ){*pucRegBuffer++ = xMBUtilGetBits( ucRegDiscreteBuf, usBitOffset,( uint8_t)( iNDiscrete > 8 ? 8 : iNDiscrete ) );iNDiscrete -= 8;usBitOffset += 8;}}else{eStatus = MB_ENOREG;}return eStatus;
}
/*** @}*/
usAddress--;每一个都有这个是因为在modbus内部处理的时候,会将地址+1,从1开始。所以读数组的时候,会出现问题。
现在再次编译:
![]()
我们按照指示,打开mbutils.c
void __aeabi_assert(const char *expr, const char *file, int line) {// 打印断言失败信息(根据需要修改,如输出到串口、LCD等)// 断言失败后的处理(如停机、复位等)while (1); // 死循环,防止程序继续运行// 或调用复位函数(根据芯片型号,如 NVIC_SystemReset())
}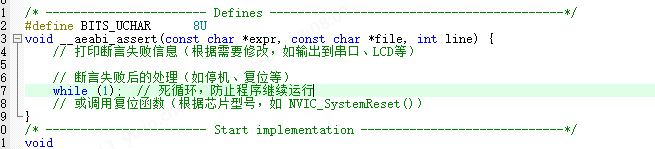
加入后,编译通过,下载:
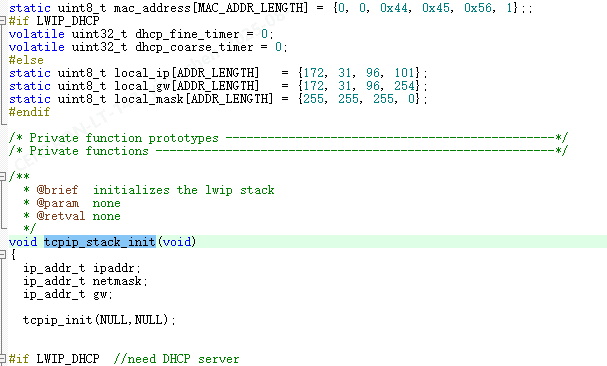
打开tcpip_stack_init();函数,发现绑定ip为172.31.96.101.我的eMBTCPInit( MB_TCP_PORT_USE_DEFAULT );为默认502.
发送数据:读取8个数据:收到回应。