控制建模matlab练习06:比例积分控制-②PI控制器
此练习主要是比例积分控制,包括三部分:
①系统建模;
②PI控制器;
③PI控制器的应用;
以下是,第②部分:PI控制器。
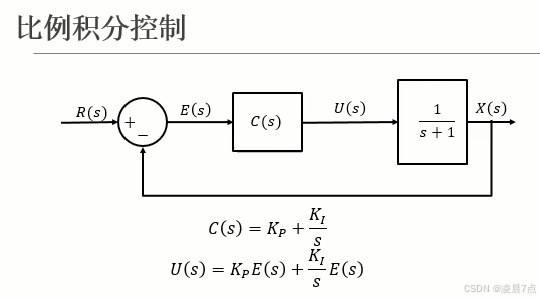
一、控制系统描述
R(s):参考值,输入;
E(s):误差;
C(s):控制器;下面公式代表是一个PI;
U(s):控制量;
1/(s+1):系统本身的传递函数;
X(s):输出;
clc;clear;close all;
%% 定义G(s),也就是系统的传递函数
G_s = tf([1], [1,1]);
%% 定义比例积分微分控制
kp = 0;
ki = 1;
kd = 0;
C_s = pid(kp, ki, kd); %% 仿真
sys = feedback (C_s*G_s, 1);%开环部分C_s*G_s,单位反馈1。
step(sys);%通过单位阶跃响应,可以分析系统的收敛速度、稳定性等。
hold on;二、运行结果及分析
- 这里因为是使用单位阶跃响应step(sys);
- 所以,单位阶跃响应的输入参考值就是1;
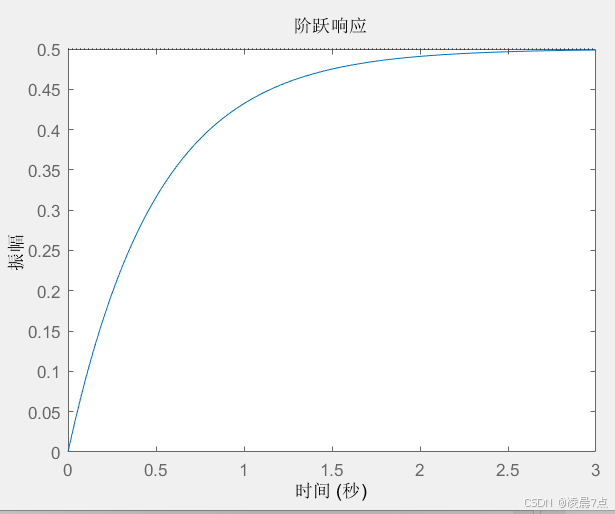
1、当Kp=1,Ki=0,Kd=0;
(最后稳定在0.5,距离1还有比较大的稳态误差)
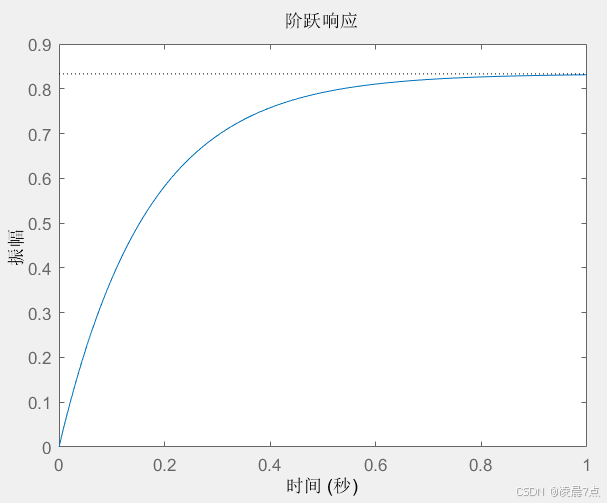
2、当Kp=5,Ki=0,Kd=0;
(比例项增大,最后稳定在0.8多,稳态误差还是存在)
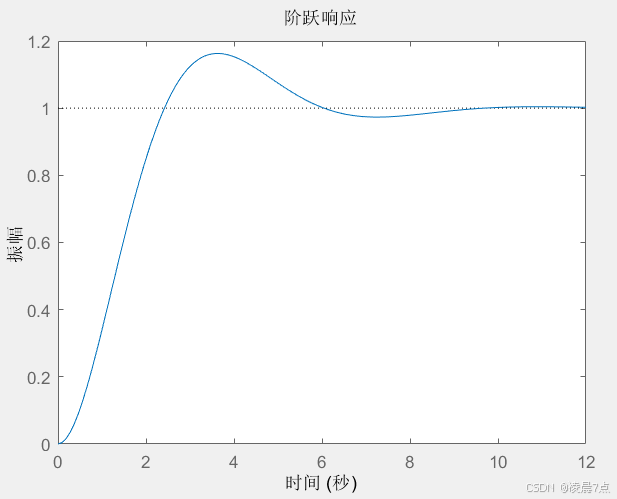
3、Kp=0,Ki=1,Kd=0;
(当只有积分项的时候,可以消除稳态误差达到1,但是出现振荡)
(因为,积分将原来的一阶系统变成二阶系统了)
学习来源:《控制之美》[卷1],王天威