智能平台的感知进化:AI × 视频通感在群体终端协同中的应用探索
✳️ 引言:从单兵到集群,未来智能平台的协同演进
从传统的单兵执行任务到如今的“群体智能平台编组”,现代感知系统正经历一场由 AI、机器人与智能计算平台驱动的深度变革。过去,履带式无人平台在平坦地形中承担支援任务,而今,具备复杂地形通行能力、自主决策与任务执行能力的四足智能地面终端,正逐步成为未来任务体系中的关键节点。
2025 年“八一”节日前夕,央视发布的《攻坚——矢志强军向一流》宣传片中,一段罕见的系统演练画面首次披露:由多型地面智能终端组成的自主集群协同单元,在实训任务中快速穿插突入“任务区域”,完成多任务协同与高复杂度响应处置。其中,搭载智能控制模块并具备场景演示能力的“机器狼”亮相,标志着我国在智能群体平台构建方面的又一次技术跃升。
这不是未来构想,也不是演示动画,而是 AI 算法、视频感知、边缘计算与集群控制等关键技术协同集成、真实部署的成果。
🎥 视频通感系统:智能协同平台的“神经中枢”
在这类系统中,有一项能力贯穿“感知—识别—协同—响应”的核心主线:视频通感系统。
在“机器狼”这类智能平台中,视频不仅是“图像”,更承担以下关键能力:
-
✅ 实时环境建模:为 AI 提供第一时间输入数据;
-
✅ 多终端协同:构建集群节点之间的感知共识;
-
✅ 精准任务响应:低延迟视频流支撑动态控制决策;
-
✅ 多点调度支持:作为远程指挥或自动调度的依据。
视频系统已然成为整套智能集群的“感知中枢”。这不仅依赖高性能图像采集设备,更依赖稳定、灵活、低延迟的视频采集、编码、传输与处理链路。大牛直播SDK正是其中的关键组件,支撑起“看得清、传得快、接得上”的全链路通感能力。
🔧 一、平台演进:集群式智能终端对视频链路的新需求
📈 作战形态演进路径对比
| 演进阶段 | 核心特征 | 控制模式 | 感知手段 |
|---|---|---|---|
| 🚶 单人终端 | 人为感知+手动操作 | 点对点响应 | 肉眼观察、语音调度 |
| 🚜 履带平台 | 有人远控、局部智能 | 单向任务执行 | 视频监控辅助感知 |
| 🐺 四足群体智能平台 | 多终端协同+AI调度 | 多点自主协同 | 实时视频+AI识别 |
🎯 视频通感系统的新挑战
| 维度 | 技术要求 | 价值意义 |
|---|---|---|
| ⏱ 延迟控制 | 全链路控制 <200ms | 决定系统响应速度 |
| 📡 多流并发 | 支持多设备同时推/拉流 | 实现群体智能感知 |
| 🌐 弱网自适应 | 自适应带宽+断点重连 | 保障信号连续性 |
| 🧩 模块化部署 | 可嵌入国产/ARM/边缘设备 | 提升平台通用性 |
| 🤖 AI对接能力 | 支持YUV/RGB帧回调 | 实现实时识别联动 |
🧠 二、大牛直播SDK在智能终端系统中的作用解析
在“机器狼”这类四足平台中,感知、判断、响应均围绕视频进行。大牛直播SDK提供了一套完整的视频通信能力基座,已广泛应用于智能机器人、无人机、特种装备等场景。
⚙️ 核心模块与对应功能
| 模块 | 能力 | 在平台中的角色 |
|---|---|---|
| 📡 RTSP/RTMP 推送 | 高分辨率、稳定低延迟 | 终端视频上传链路 |
| 🎛 嵌入式RTSP服务 | 本地轻量部署 | 构建本地服务节点 |
| 📺 多路播放器 | 并发播放+断网优化 | 指挥系统多画面调度 |
| 🎞 YUV/RGB回调 | 原始帧输出 | 支持AI模型对接分析 |
| 🧩 跨平台兼容 | Android/Linux/ARM | 支持国产化与边缘平台 |
| 🔐 异常容错机制 | 自动重连/恢复 | 保证关键时刻不中断 |
🎯 视频不再是“图像展示”,而是“任务数据流”,连接每一次感知和每一个响应。
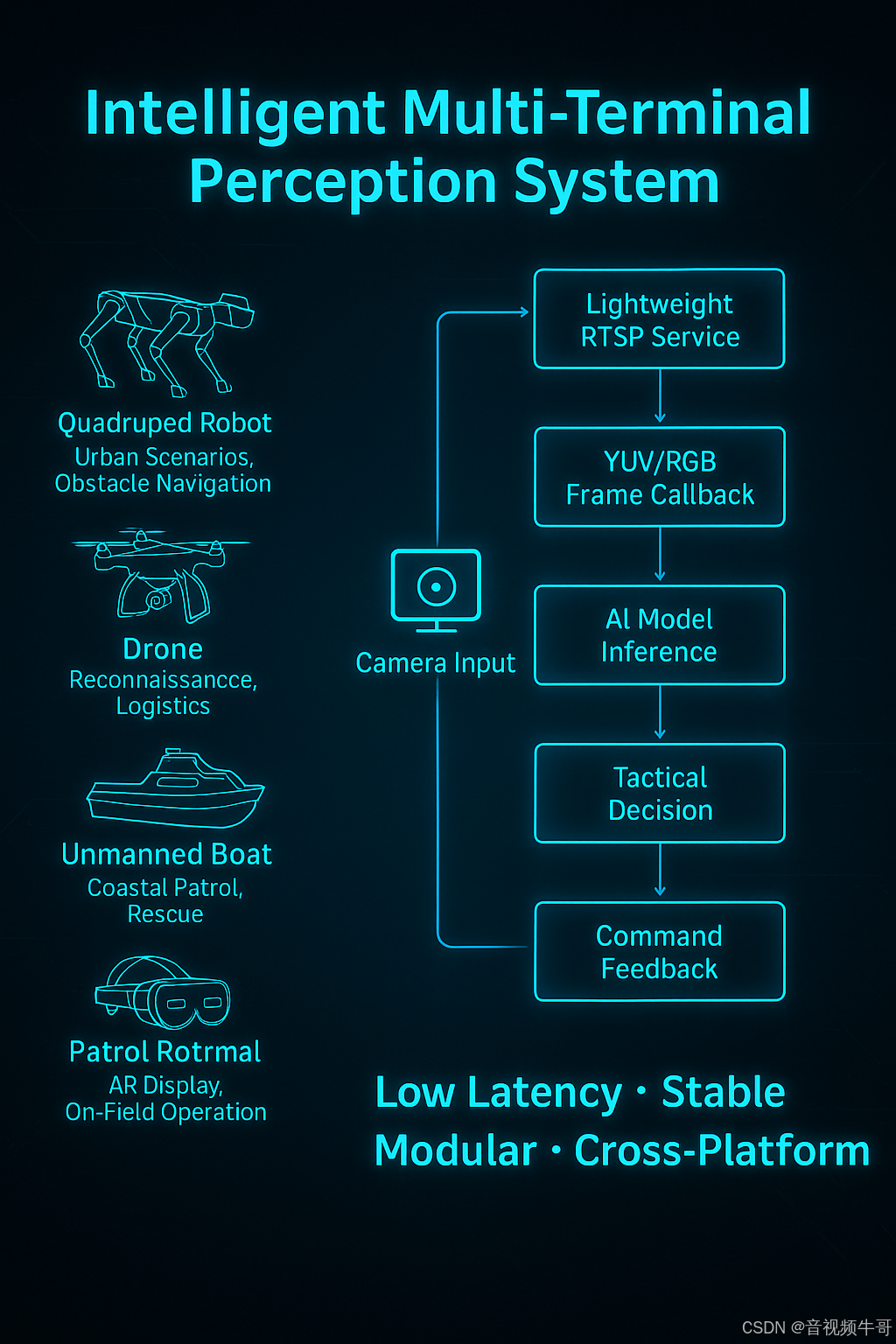
🔄 示例链路:大牛SDK通感路径
【采集端】
[摄像头] → [大牛SDK 推送模块(RTSP)]↓本地轻量级 RTSP 服务模块↓
【指挥/AI处理端】
[大牛SDK 播放器] → [YUV帧回调] → [AI识别系统]↓[任务调度逻辑]↓
【反馈端】[打击模块 / 物资模块 控制指令]
🌍 三、智能感知平台中的“视频神经链路”结构解读
在 AI + 多终端协同体系中,视频通感不仅是视觉入口,更是跨端决策与自动响应的“神经骨架”。
📌 视频系统五大核心职能
| 职能 | 描述 |
|---|---|
| 🎥 视觉入口 | 实时采集视角画面输入 |
| 📡 数据桥梁 | 稳定传输保障信息同步 |
| 🧠 识别驱动 | 提供 AI 模型实时输入流 |
| 📊 多端汇聚 | 构建任务态势全图 |
| 🔁 反馈媒介 | 实现快速指令闭环控制 |
🚀 四、应用拓展:从“机器狼”走向泛在“无人感知终端”
“机器狼”只是智能协同平台的一个缩影。大牛直播SDK在更广泛的无人平台中发挥同样的价值,形成统一的跨端视频感知通道。
Android平台RTSP播放器时延测试
🧭 应用类型对照表
| 平台类型 | 典型应用 | SDK 支持能力 |
|---|---|---|
| 🐺 四足机器人 | 城市巡逻、障碍场景响应 | 轻量RTSP+帧回调 |
| 🚁 无人机 | 空中侦察/输送 | RTMP推流+断网重连 |
| 🚤 无人艇 | 水面警戒、港口协防 | 弱网优化+跨平台适配 |
| 🚜 履带平台 | 工程排障、运输任务 | 编码器推流+同步播放 |
| 🤖 巡逻机器人 | 园区巡逻、厂区监控 | 嵌入式RTSP+AI接入 |
| 🧠 穿戴终端 | AR眼镜/背负设备 | 超低延迟播放+回看支持 |
🎯 五、结语:视频通感,智能系统的“信息基座”
随着“机器狼”类平台逐步进入实际部署阶段,未来的智能系统协同将更加依赖“感知先行”。判断源于信息,执行依赖反馈,而视频通感链正是这一切的起点。
大牛直播SDK作为一套广泛服务于工业级、AI级视频应用的跨平台通感系统,正成为构建未来多终端感知协同体系的“视频中枢”。其稳定、可嵌入、可扩展的特性,使其不仅适用于机器人,也适配无人机、特种巡逻设备、应急终端等多类型智能节点。
在“无人 × 智能 × 多终端”的趋势下,大牛直播SDK正通过标准化、模块化能力,把复杂的视频链路抽象为通用组件,为未来智能系统构建起真正意义上的“信息神经网络”。
📄 免责声明:本文基于公开资料与技术分析视角,所涉系统均为工业智能感知平台,内容不涉及军事用途或敏感信息。