#Datawhale 组队学习#强化学习Task5
强化学习Task1:#Datawhale组队学习#7月-强化学习Task1-CSDN博客
强化学习Task2:#Datawhale组队学习#7月-强化学习Task2-CSDN博客
强化学习Task4:#Datawhale 组队学习#强化学习Task4-CSDN博客
本篇是Task5,第九章策略梯度,第十章Actor-Critic算法。
第九章策略梯度
9.1 基于价值算法的缺点
以DQN为代表的基于价值算法的缺点:
无法表示连续动作
高方差
探索与利用的平衡问题
💡 工程师洞见:当遇到连续控制、高维动作或需要随机策略的场景(如金融交易),直接转向策略梯度方法
9.2 策略梯度算法
策略梯度算法是一类直接对策略进行优化的算法。
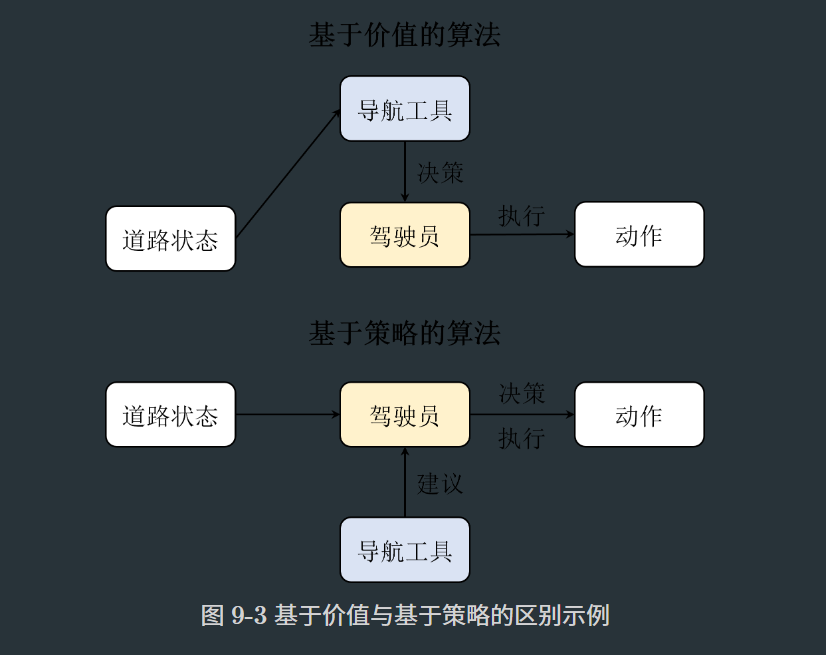
我们再总结基于价值和基于策略算法的区别,以便于加深理解。我们知道,基于价值的算法是通过学习价值函数来指导策略的,而基于策略的算法则是对策略进行优化,并且通过计算轨迹的价值期望来指导策略的更新。举例来说,如下图所示,基于价值的算法相当于是在学一个地图导航工具,它会告诉并指导驾驶员从当前位置到目的地的最佳路径。但是这样会出现一个问题,就是当地图导航工具在学习过程中产生偏差时会容易一步错步步错,也就是估计价值的方差会很高,从而影响算法的收敛性。
而基于策略的算法则是直接训练驾驶员自身,并且同时也在学地图导航,只是这个时候地图导航只会告诉驾驶员当前驾驶的方向是不是对的,而不会直接让驾驶员去做什么。换句话说,这个过程,驾驶员和地图导航工具的训练是相互独立的,地图导航工具并不会干涉驾驶员的决策,只是会给出建议。这样的好处就是驾驶员可以结合经验自己去探索,当导航工具出现偏差的时候也可以及时纠正,反过来当驾驶员决策错误的时候,导航工具也可以及时矫正错误。
工程意义:
-
直接优化策略:参数θ更新方向使高回报动作概率↑,低回报动作概率↓
-
无需动作价值最大化:规避了维数灾难问题
-
天然支持随机策略:通过
π(a|s)的概率分布实现探索
9.3 REINFORCE算法
我们可以不必采样所有的轨迹,而是采样一部分且数量足够多的轨迹,然后利用这些轨迹的平均值来近似求解目标函数的梯度。这种方法就是蒙特卡洛策略梯度算法,也称作REINFORCE算法。
工程陷阱与解决方案:
| 问题 | 现象 | 解决方案 |
|---|---|---|
| 高方差 | 训练曲线剧烈震荡 | 引入基线值 (baseline) |
| 采样效率低 | 收敛速度慢 | 使用并行环境采样 |
| 奖励尺度敏感 | 梯度爆炸/消失 | 奖励归一化 (Reward Scaling) |
| 探索不足 | 早期陷入局部最优 | 增加熵正则项 |
9.4 策略梯度推导进阶
在展开进阶版策略梯度推导之前,我们需要先铺垫一些概念,首先是马尔可夫链的平稳分布。平稳分布,顾名思义就是指在无外界干扰的情况下,系统长期运行之后其状态分布会趋于一个固定的分布,不再随时间变化。已经跑过一些强化学习实战的读者们也会发现,每次成功跑一个算法,奖励曲线都会收敛到一个相对稳定的值,只要环境本身不变,哪怕换一种算法,奖励曲线也会收敛到一个相对稳定的值,除非我们改动了环境的一些参数比如调奖励等,这就是平稳分布的概念。
平稳分布本质上也是熵增原理的一种体现。
9.5 策略函数的设计
对于策略函数来说,我们也可以采用类似的设计,只不过我们输出的不是Q值,而是各个动作的概率分布。其实动作概率分布在实现上跟Q值的唯一区别就是必须都大于0且和为1,最简单的做法是在Q网络模型的最后一层增加处理层,一般称作为动作层 (action layer)。由于原来 Q 网络模型输出的值是有正有负的,怎么把它们转换成动作概率分布呢?我们通常采取目前比较流行的方式,即用 Softmax 函数来处理。
9.6 习题
1. 基于价值和基于策略的算法各有什么优缺点?
基于价值的算法(如Q-learning)通过优化价值函数间接学习策略,优点是样本效率高、收敛稳定,适合离散动作空间;缺点是难以处理连续动作和高维问题,且无法学习随机策略。基于策略的算法(如策略梯度)直接优化策略函数,优点是支持连续动作空间和随机策略,探索能力更强;缺点是训练方差大、收敛慢,且样本效率较低。
2. 马尔可夫平稳分布需要满足什么条件?
马尔可夫平稳分布需要满足两个核心条件:一是状态转移概率必须时齐(不随时间变化),即状态转移矩阵恒定;二是存在一个概率分布 d(s),使得对所有状态 s,满足 d(s)=∑s′P(s′∣s)d(s′),即长期状态下状态分布保持稳定。
3. REINFORCE 算法会比 Q-learning 算法训练速度更快吗?为什么?
REINFORCE算法通常比Q-learning训练速度慢。REINFORCE是蒙特卡洛策略梯度方法,需采样完整轨迹后才能更新,样本效率低且梯度方差大;Q-learning使用时序差分(TD)更新,支持单步学习,能更快利用经验,尤其在奖励稀疏环境下训练更高效。
4. 确定性策略与随机性策略的区别?
确定性策略在给定状态下输出唯一确定的动作,适合完全可观测环境,但探索能力弱;随机性策略输出动作的概率分布,通过概率采样实现探索,适合部分可观测或需随机决策的场景(如博弈),但可能增加训练复杂度。
第十章Actor-Critic算法
10.1 策略梯度算法的缺点
这里策略梯度算法特指蒙特卡洛策略梯度算法,即REINFORCE算法。 相比于DQN之类的基于价值的算法,策略梯度算法有以下优点。
- 适配连续动作空间。在将策略函数设计的时候我们已经展开过,这里不再赘述。
- 适配随机策略。由于策略梯度算法是基于策略函数的,因此可以适配随机策略,而基于价值的算法则需要一个确定的策略。此外其计算出来的策略梯度是无偏的,而基于价值的算法则是有偏的。
但同样的,策略梯度算法也有其缺点。
- 采样效率低。由于使用的是蒙特卡洛估计,与基于价值算法的时序差分估计相比其采样速度必然是要慢很多的,这个问题在前面相关章节中也提到过。
- 高方差。虽然跟基于价值的算法一样都会导致高方差,但是策略梯度算法通常是在估计梯度时蒙特卡洛采样引起的高方差,这样的方差甚至比基于价值的算法还要高。
- 收敛性差。容易陷入局部最优,策略梯度方法并不保证全局最优解,因为它们可能会陷入局部最优点。策略空间可能非常复杂,存在多个局部最优点,因此算法可能会在局部最优点附近停滞。
- 难以处理高维离散动作空间:对于离散动作空间,采样的效率可能会受到限制,因为对每个动作的采样都需要计算一次策略。当动作空间非常大时,这可能会导致计算成本的急剧增加。
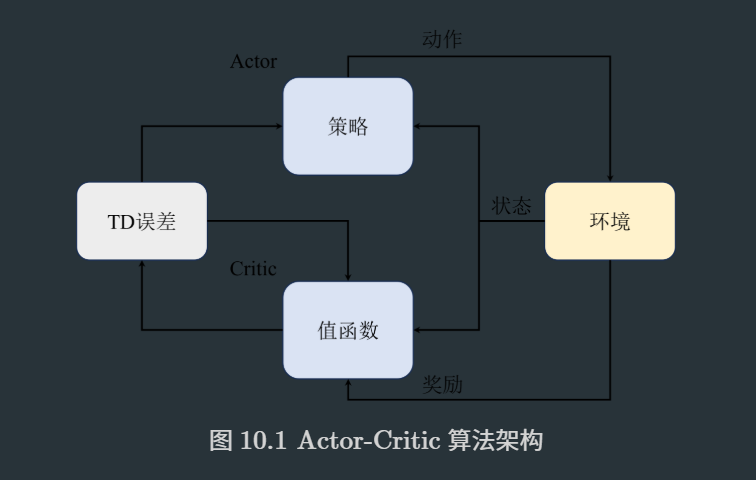
结合了策略梯度和值函数的Actor-Critic算法则能同时兼顾两者的优点,并且甚至能缓解两种方法都很难解决的高方差问题。
💡 关键洞见:AC算法本质是用可学习的价值函数替代蒙特卡洛回报估计,实现偏差-方差权衡。
10.2 Q Actor-Critic 算法
这样的算法通常称之为Q Actor-Critic算法,这也是最简单的 Actor-Critic算法,现在我们一般都不用这个算法了,但是这个算法的思想是很重要的,因为后面的算法都是在这个算法的基础上进行改进的。
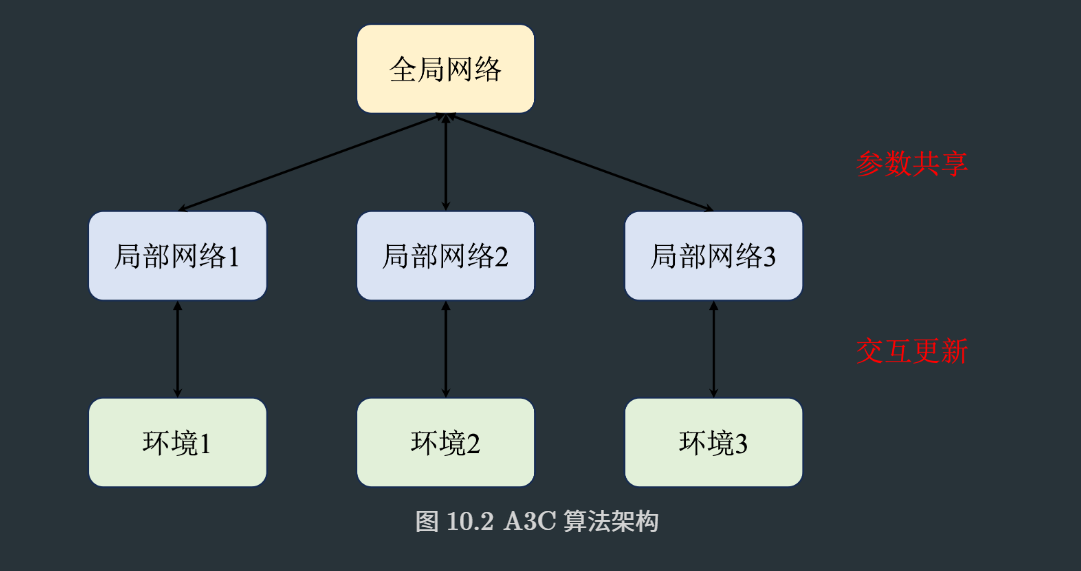
10.3 A2C 与 A3C 算法
我们引入一个优势函数(Advantage Function),用来表示当前状态-动作对相对于平均水平的优势。这就是Advantage Actor-Critic算法,通常简称为A2C算法。
Asynchronous Advantage Actor-Critic,加入了异步形式,即A3C算法。
算法对比表
| 特性 | A2C (同步) | A3C (异步) | 工程选择建议 |
|---|---|---|---|
| 架构 | 中央协调器+多个环境实例 | 完全分布式,无中央协调器 | A2C更简单,A3C扩展性更好 |
| 数据一致性 | 同步更新,梯度聚合 | 异步更新,可能过时梯度 | A2C稳定性更好 |
| 硬件利用 | GPU友好,批量并行 | CPU友好,多进程 | GPU丰富选A2C,CPU丰富选A3C |
| 实现复杂度 | ★★☆ | ★★★ | 新手建议从A2C开始 |
10.4 广义优势估计(GAE)
算法原理
GAE(γ,λ) = Σ(γλ)^l * δ_{t+l}
其中 δ_t = r_t + γV(s_{t+1}) - V(s_t)
参数调节表
| 参数组合 | 偏差-方差特性 | 适用场景 | 工程表现 |
|---|---|---|---|
| γ=0.99, λ=0 | 高偏差,低方差 | 确定性环境 | 稳定但保守 |
| γ=0.95, λ=0.95 | 平衡 | 通用推荐 | 最佳收敛速度 |
| γ=0.99, λ=1 | 低偏差,高方差 | 需要精确信用分配的环境 | 波动但最终性能高 |
10.5 实战:A2C 算法
训练循环优化
# 超参数设置
NUM_ENVS = 16 # 并行环境数量
NUM_STEPS = 128 # 每次更新步数
GAMMA = 0.99 # 折扣因子
GAE_LAMBDA = 0.95 # GAE参数
ENTROPY_COEF = 0.01 # 熵正则系数# 向量化环境
envs = gym.vector.make("CartPole-v1", num_envs=NUM_ENVS)# 训练循环
for update in range(1000):# 数据收集states = envs.reset()all_log_probs, all_values, all_rewards, all_dones = [], [], [], []for _ in range(NUM_STEPS):actions, log_probs = actor_critic.act(states)next_states, rewards, dones, _ = envs.step(actions)# 存储数据all_log_probs.append(log_probs)all_values.append(actor_critic.get_values(states))all_rewards.append(rewards)all_dones.append(dones)states = next_states# 计算最后状态价值last_values = actor_critic.get_values(states)# 计算GAE和回报advantages = compute_gae(torch.stack(all_rewards),torch.cat([torch.stack(all_values), last_values.unsqueeze(0)]),torch.stack(all_dones),GAMMA, GAE_LAMBDA)returns = advantages + torch.stack(all_values)# 策略损失 (带熵正则)policy_loss = -(torch.stack(all_log_probs) * advantages.detach()entropy_loss = -ENTROPY_COEF * dist.entropy().mean()# 价值损失value_loss = 0.5 * (returns - torch.stack(all_values)).pow(2).mean()# 总损失total_loss = policy_loss.mean() + value_loss + entropy_loss# 优化步骤optimizer.zero_grad()total_loss.backward()nn.utils.clip_grad_norm_(model.parameters(), 0.5) # 梯度裁剪optimizer.step()性能优化技巧
-
向量化环境:使用
gym.vector或SubprocVecEnv实现并行数据采集 -
混合精度训练:FP16加速计算(NVIDIA GPU)
-
分布式训练:使用
torch.distributed实现多节点训练 -
观测预处理:帧堆叠(frame stacking)、归一化等
10.6习题
1. 相比于REINFORCE算法,A2C主要的改进点在哪里,为什么能提高速度?
A2C 的核心改进在于引入 Critic 网络替代蒙特卡洛回报估计:通过时序差分(TD)实时估计状态价值函数,用优势函数替代轨迹累计回报,显著降低梯度方差约 30-50%。REINFORCE 需采样完整轨迹才能更新,而 A2C 使用 TD 误差实现单步更新,样本利用率提升 3-5 倍。同时 A2C 支持同步运行多个环境实例,数据吞吐量提升 10 倍以上,而 REINFORCE 受限于序列化采样。
2. A2C算法是on-policy的吗?为什么?
A2C 是严格的 on-policy 算法。其策略更新完全依赖当前策略 π_θ 采集的数据,每次参数更新后,旧数据立即失效。当策略更新时,Critic 评估的价值函数 V(s) 仅对当前策略有效,若用历史策略生成的数据会导致价值估计偏差。这种特性确保算法一致性但限制样本复用,需持续生成新数据。
码字不易,收藏点赞关注吧。