2025年第四届创新杯(原钉钉杯)赛题浅析-助攻快速选题
本届竞赛整体难度约为0.4个国赛,时间很长,非常适合于国赛之前进行练手。本文将为大家带来赛题浅析,以便大家能够快速地熟悉题目,提前预知该题目在后续求解中会遇到什么样的潜在问题。
选题人数预测 A:B=1:1
赛题难度评估 A:B=1:1
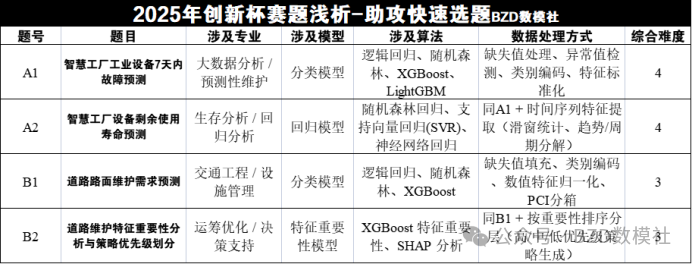
初赛A:智慧工厂工业设备传感器数据分析
问题背景:
智慧工厂通过传感器和AI算法实现设备状态监控与预测性维护。任务包括设备故障预测和剩余使用寿命预测。
任务分析:
故障预测(任务A):
l目标:预测设备在7天内是否会发生故障。
l特征:包括机器编号、运行小时数、温度、振动、声音、油位、冷却液位等。
l建模方法:
Ø分类算法:由于目标是预测是否发生故障,可以使用分类算法(如逻辑回归、随机森林、支持向量机等)进行模型训练。
Ø评估指标:准确率、召回率和F1值。
Ø特征重要性分析:通过模型分析出最重要的特征,例如使用SHAP值或者基于树的模型来提取特征重要性。
剩余使用寿命预测(任务B):
l目标:预测设备的剩余使用寿命(连续值)。
l特征:使用设备的运行小时数、温度、振动等来预测剩余寿命。
l建模方法:
Ø回归算法:使用回归算法(如线性回归、支持向量回归、随机森林回归等)来预测剩余使用寿命。
Ø评估指标:均方误差(MSE)和决定系数(R²)。
Ø特征重要性分析:通过特征选择算法(如递归特征消除RFE)来分析哪些特征对剩余寿命的预测影响最大。
初赛B:道路路面维护需求综合预测
问题背景:
通过分析道路路面状况,预测是否需要进行维护,提供决策支持。
任务分析:
路面维护需求预测(任务A):
l目标:预测某条道路是否需要维护(0或1的二分类问题)。
l特征:路段ID、路面状况指数(PCI)、交通量、车辙深度等。
l建模方法:
Ø分类算法:使用分类算法(如逻辑回归、随机森林、支持向量机等)进行预测。
Ø评估指标:准确率、召回率和F1值。
Ø特征重要性分析:通过树模型(如随机森林、XGBoost)来分析各特征的贡献。
特征重要性分析与维护策略优化(任务B):
l目标:基于预测结果分析特征重要性,并提出维护优先级策略。
l方法:
Ø特征重要性分析:可以使用基于树的模型(如XGBoost)或Shapley值进行特征重要性排序。
Ø优先级划分:根据特征重要性排序,将道路分为不同优先级进行维护(例如,PCI较低且车辙深度较大的路段优先进行维护)。