Zero-Shot TrackingT0:对象分割+运动感知记——当“切万物”武士学会运动记忆,目标跟踪稳如老狗
目录
- 💻 实战效果演示
- 🔧 核心机制
-
- 1. 运动建模系统(Motion Modeling)
-
- ▍原SAMv2缺陷
- ▍SAMURAI新方案
- 关键技术突破:
- 2. 运动感知记忆库(Motion-Aware Memory)
-
- ▍原架构缺陷分析
- 动态阈值机制:
- 📊 实验数据深度验证
-
- 1. 基准测试全面领先
- 2. 场景化优势解析
- 3. 消融实验铁证
- ⚙️ 工程实现关键细节
-
- 1. 零样本实现原理
- 2. 实时性保障设计
- 🚀 工业落地潜力
-
- 1. 自动驾驶场景
-
- 挑战:交叉路口行人跟踪
- 2. 工业检测场景
- 展望
💻 实战效果演示
samurai_tiny
🔧 核心机制
1. 运动建模系统(Motion Modeling)
▍原SAMv2缺陷
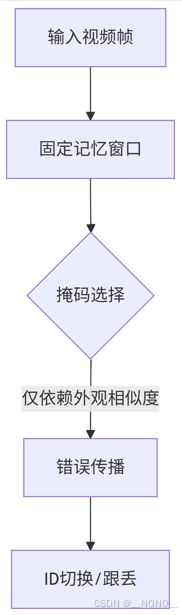
▍SAMURAI新方案
class KalmanEnhancedSelector:def __init__(self):self.kf = KalmanFilter(dim_x=8, dim_z=4) # 状态向量[x,y,w,h,dx,dy,dw,dh]self.alpha = 0.2 # 论文验证def select_mask(self, masks: List[Mask], scores: List[float]) -> Mask:""" 融合运动与外观的双路径决策 """kf_predictions = [self.kf.predict() for _ in masks]kf_scores = [iou(kf_pred, mask.bbox) for mask, kf_pred in zip(masks, kf_predictions)]combined_scores = [self.alpha * kf_score + (1-self.alpha) * mask_score for kf_score, mask_score in zip(kf_scores, scores)]return masks[np