【沧海拾昧】微分先行PID与中间微分反馈控制
#C0404
——《沧海拾昧集》@CuPhoenix
目录
- 前言
- 一、微分先行PID算法
- 1、基本概念
- 2、仿真框图
- 3、离散公式
- 二、中间微分反馈算法
- 1、基本概念
- 2、仿真框图
- 3、离散公式
- 三、参考文献
前言
微分先行 PID 算法和 中间微分反馈 算法是两种针对纯时延过程进行补偿的常规控制方案,但目前许多互联网资料中将两种方法进行了混淆。事实上,两种控制方法的结构与效果是存在一定差异的。
本文将简要介绍两种控制方法的基本结构,并给出相应推导的位置式公式和增量式公式。
本文用到的软件环境是:
- MATLAB R2019b
一、微分先行PID算法
1、基本概念
微分先行控制方案与传统 PID 控制方案相比,对于减小超调量有更显著的表现,这是因为虽然二者的特征方程完全相同,但微分先行控制方案的闭环传递函数比 PID 控制方案少一个零点。

可以看出,这种传统的 PID 控制方案中的微分环节的输入是对偏差做了比例积分运算后的值,不能真正的直接对被控参数的变化速度进行校正,因此克服动态超调的作用是有限的。但如果将微分环节直接作用于反馈通道中,就可以较大程度的增加微分作用克服超调的能力,也就是所谓的微分先行控制。
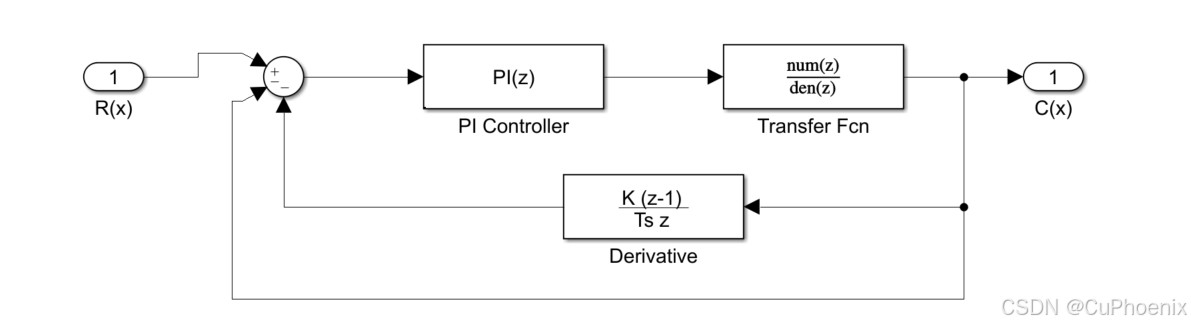
必须指出的是,微分先行控制方案中,微分环节的输出信号包括了 被控参数,以及 被控参数的变化速度,并将其作为测量值输入比例积分调节器中。目前许多资料中所给出的将被控参数的变化速度直接与 PI 调节器的输出值相减实际上是中间微分控制方案,而不是微分先行控制方案。
2、仿真框图
3、离散公式
- 位置式离散公式
按照框图,微分先行控制方案离散形式公式为:
out(t)=Kp⋅E(k)+Ki⋅T⋅∑j=0kE(j)out(t)=K_p\cdot E(k)+K_i\cdot T \cdot\sum^k_{j=0}E(j) out(t)=Kp⋅E(k)+Ki⋅T⋅j=0∑kE(j)
其中 E(k)=r(x)−c(x)−ddtc(x)=e(k)−Kd⋅c(k)−c(k−1)TE(k)=r(x)-c(x)-\dfrac{d}{dt}c(x)=e(k)-K_d\cdot\dfrac{c(k)-c(k-1)}{T}E(k)=r(x)−c(x)−dtdc(x)=e(k)−Kd⋅Tc(k)−c(k−1);
- 增量式离散公式
由位置式离散公式有:
out(k)=Kp⋅E(k)+Ki⋅T⋅∑j=0kE(j)out(k−1)=Kp⋅E(k−1)+Ki⋅T⋅∑j=0k−1E(j)out(k)=K_p\cdot E(k)+K_i\cdot T \cdot\sum^k_{j=0}E(j) \\ out(k-1)=K_p\cdot E(k-1)+K_i\cdot T \cdot\sum^{k-1}_{j=0}E(j) out(k)=Kp⋅E(k)+Ki⋅T⋅j=0∑kE(j)out(k−1)=Kp⋅E(k−1)+Ki⋅T⋅j=0∑k−1E(j)
两式相减,即为:
Δout=Kp⋅[E(k)−E(k−1)]+Ki⋅T⋅E(k)\Delta out=K_p\cdot[E(k)-E(k-1)]+K_i\cdot T\cdot E(k) Δout=Kp⋅[E(k)−E(k−1)]+Ki⋅T⋅E(k)
将 E(k)=e(k)−Kd⋅c(k)−c(k−1)TE(k)=e(k)-K_d\cdot\dfrac{c(k)-c(k-1)}{T}E(k)=e(k)−Kd⋅Tc(k)−c(k−1) 和 E(k−1)=e(k−1)−Kd⋅c(k−1)−c(k−2)TE(k-1)=e(k-1)-K_d\cdot\dfrac{c(k-1)-c(k-2)}{T}E(k−1)=e(k−1)−Kd⋅Tc(k−1)−c(k−2) 代入上式,即得:
Δout=Kp⋅[e(k)−Kd⋅c(k)−c(k−1)T−e(k−1)+Kd⋅c(k−1)−c(k−2)T]+Ki⋅T⋅[e(k)−Kd⋅c(k)−c(k−1)T]\Delta out=K_p\cdot[e(k)-K_d\cdot\frac{c(k)-c(k-1)}{T}-e(k-1)+K_d\cdot\frac{c(k-1)-c(k-2)}{T}]+K_i\cdot T\cdot [e(k)-K_d\cdot\frac{c(k)-c(k-1)}{T}] Δout=Kp⋅[e(k)−Kd⋅Tc(k)−c(k−1)−e(k−1)+Kd⋅Tc(k−1)−c(k−2)]+Ki⋅T⋅[e(k)−Kd⋅Tc(k)−c(k−1)]
化简后有:
Δout=Kp⋅[e(k−1)−e(k)]−Kp⋅KdT[c(k)−2c(k−1)+c(k−2)]+Ki⋅T⋅e(k)−Ki⋅Kd[c(k)−c(k−1)]\Delta out=K_p\cdot[e(k-1)-e(k)]-\frac{K_p\cdot K_d}{T}[c(k)-2c(k-1)+c(k-2)]+K_i\cdot T\cdot e(k)-K_i\cdot K_d[c(k)-c(k-1)] Δout=Kp⋅[e(k−1)−e(k)]−TKp⋅Kd[c(k)−2c(k−1)+c(k−2)]+Ki⋅T⋅e(k)−Ki⋅Kd[c(k)−c(k−1)]
二、中间微分反馈算法
1、基本概念
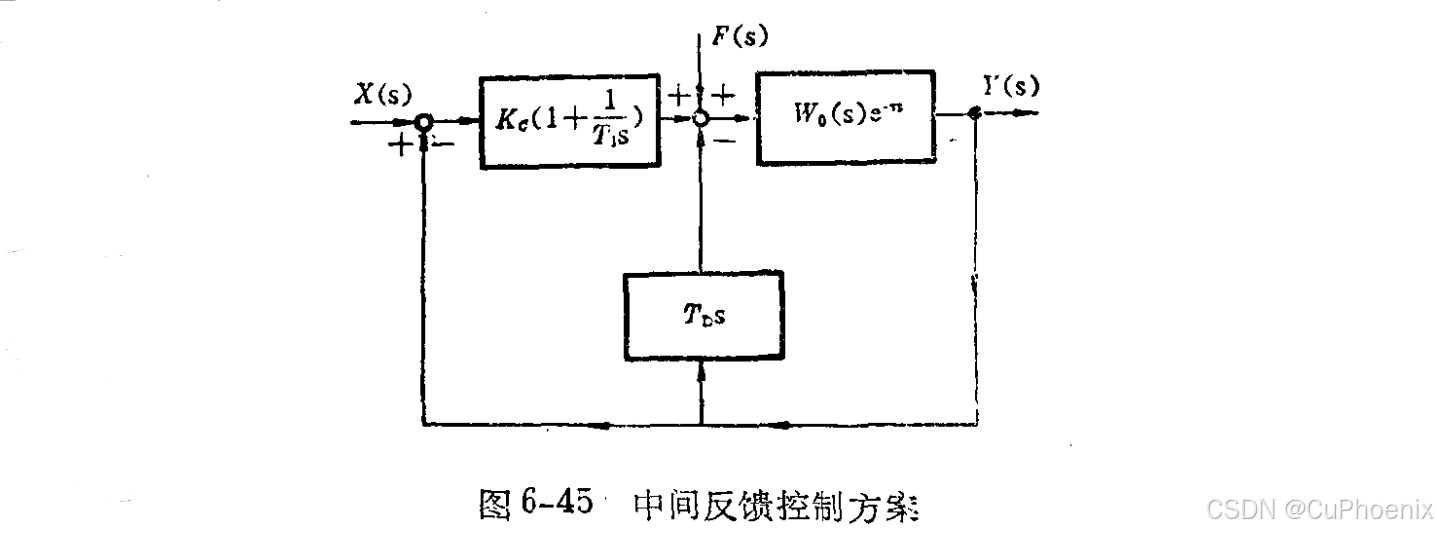
与微分先行方案的思想类似,中间微分反馈方法也是将微分环节移出,以增强对动态超调的克服作用。由图可见,在中间微分反馈方案中,微分作用是 独立 的,能在被控参数变化时及时根据其变化大小起附加校正的作用,其微分校正作用 与 PI 调节器的输出信号无关,且只在动态时其作用。
中间微分反馈控制方案的零点与原 PI 控制器的零点相同,但主导极点相比原 PI 控制方案离 jωj\omegajω 轴较远,因此衰减较快,过渡过程时间较短。
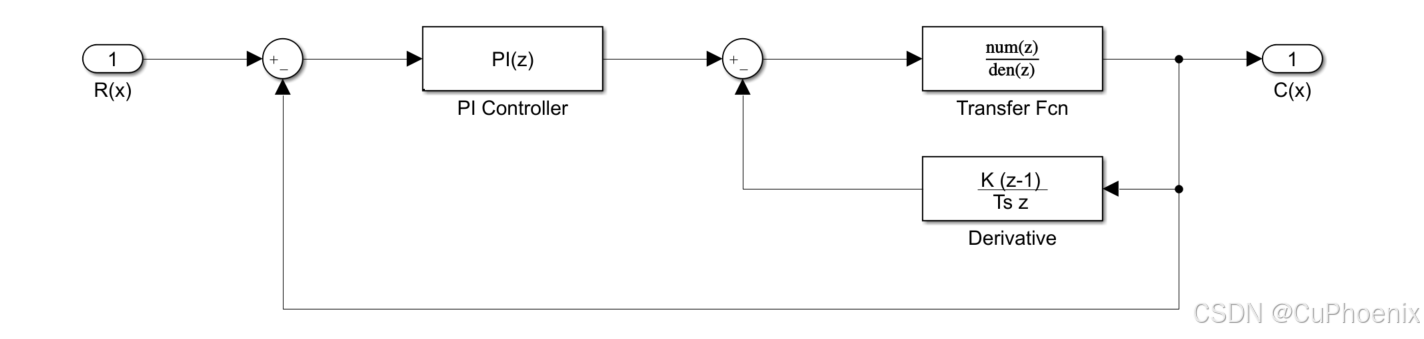
2、仿真框图
3、离散公式
- 位置式离散公式
按照框图,中间微分反馈方案连续形式公式为:
out(t)=Kp⋅e(t)+Ki⋅∫0te(t)dt−Kd⋅ddtc(t)out(t)=K_p\cdot e(t)+K_i\cdot\int^t_0e(t)dt-K_d\cdot\frac{d}{dt}c(t) out(t)=Kp⋅e(t)+Ki⋅∫0te(t)dt−Kd⋅dtdc(t)
离散化后为:
out(k)=Kp⋅e(k)+Ki⋅T⋅∑j=0ke(j)−Kd⋅c(k)−c(k−1)Tout(k)=K_p\cdot e(k)+K_i\cdot T \cdot\sum^k_{j=0}e(j)-K_d\cdot\frac{c(k)-c(k-1)}{T} out(k)=Kp⋅e(k)+Ki⋅T⋅j=0∑ke(j)−Kd⋅Tc(k)−c(k−1)
其中 e(k)=r(k)−c(k)e(k)=r(k)-c(k)e(k)=r(k)−c(k);
- 增量式离散公式
由位置式离散公式有:
out(k)=Kp⋅e(k)+Ki⋅T⋅∑j=0ke(j)−Kd⋅c(k)−c(k−1)Tout(k−1)=Kp⋅e(k−1)+Ki⋅T⋅∑j=0k−1e(j)−Kd⋅c(k−1)−c(k−2)Tout(k)=K_p\cdot e(k)+K_i\cdot T \cdot\sum^k_{j=0}e(j)-K_d\cdot\frac{c(k)-c(k-1)}{T} \\ out(k-1)=K_p\cdot e(k-1)+K_i\cdot T \cdot\sum^{k-1}_{j=0}e(j)-K_d\cdot\frac{c(k-1)-c(k-2)}{T} out(k)=Kp⋅e(k)+Ki⋅T⋅j=0∑ke(j)−Kd⋅Tc(k)−c(k−1)out(k−1)=Kp⋅e(k−1)+Ki⋅T⋅j=0∑k−1e(j)−Kd⋅Tc(k−1)−c(k−2)
两式相减,即为:
Δout=Kp⋅[e(k)−e(k−1)]+Ki⋅T⋅e(k)−KdT⋅[c(k)−2c(k−1)+c(k−2)]\Delta out=K_p\cdot[e(k)-e(k-1)]+K_i\cdot T\cdot e(k)-\frac{K_d}{T}\cdot[c(k)-2c(k-1)+c(k-2)] Δout=Kp⋅[e(k)−e(k−1)]+Ki⋅T⋅e(k)−TKd⋅[c(k)−2c(k−1)+c(k−2)]
三、参考文献
- 邵裕森.过程控制及仪表[M].上海交通大学出版社:199508.232-235.
敬谢诸君。