3D工业相机是什么?如何选择和使用它?
工业自动化越来越深入,3D成像技术(3D工业相机)在工业生产中越来越重要。这篇文章就来说说3D工业相机的技术原理、具体能应用在哪以及怎么选3D相机,给大家做个参考。
一、 技术定义与核心特点
3D工业相机,简单说就是一种特殊的成像设备。它用光学测量原理,能把物体的三维空间信息变成数字模型。相较于传统的二维成像系统(2D检测),该3D工业相机通过捕获被测物体的深度信息,构建具有X/Y/Z三轴坐标的点云数据,显著提升工业检测的精确度和维度完整性。
二、主要类型及工作原理
1.立体视觉
很多3D工业相机采用立体视觉原理,类似于人类的双眼。它们通过两个不同角度的镜头捕捉同一物体,然后利用算法计算出相对深度信息。
2.激光扫描
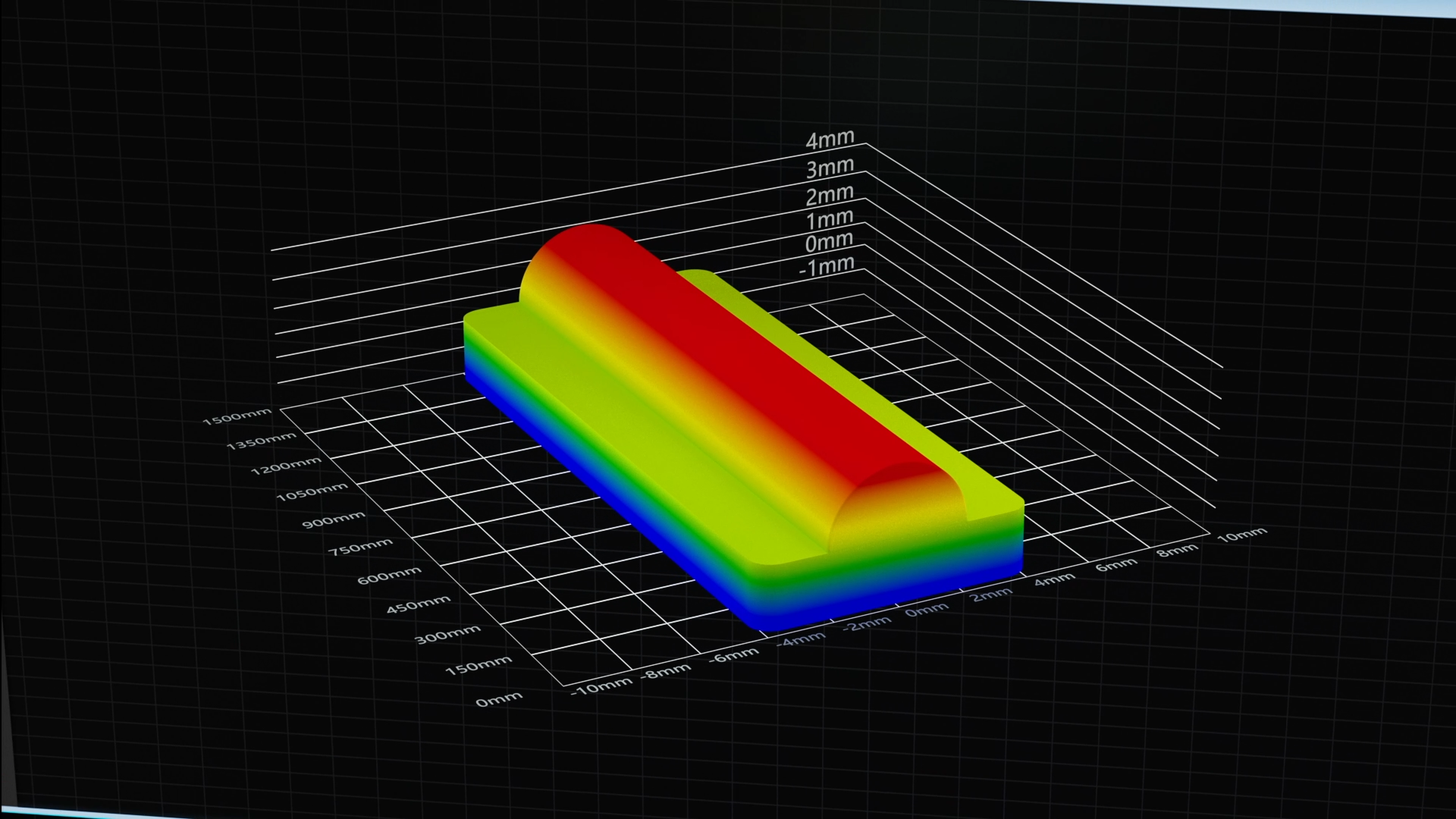
另一些3D工业相机则使用激光扫描方法,通过发射激光束并测量返回时间来获取物体的三维形状,如:3D线激光轮廓测量仪,这种3D工业相机在高精度测量中表现优异。

三、 主要应用场景
该技术已广泛应用于以下工业领域:比如:
1.智能制造领域:应用于产品表面缺陷检测、零部件三维尺寸测量等质量管控环节
2.自动化系统:为工业机器人提供视觉引导,实现精确定位与路径规划
3.逆向工程领域:结合CAD系统完成复杂曲面的数字化建模
4.医学工程:辅助CT/MRI等影像设备的三维重建与病理分析
5.食品业:实现食品体积测算,引导切分与分拣。
四、选设备看什么参数?
在工业现场选择3D相机时,需综合评估以下技术参数,结合具体应用场景和需求进行权衡:
1.分辨率:决定深度图像的像素数量,直接影响细节捕捉能力。高分辨率可提升测量精度,更高的分辨率适用于精密尺寸检测。
2.精度:指深度测量的准确度,包括重复精度(多次测量一致性)和绝对精度(与真实值偏差)。但需注意,精度与视野范围成反比,大视野通常牺牲精度 。
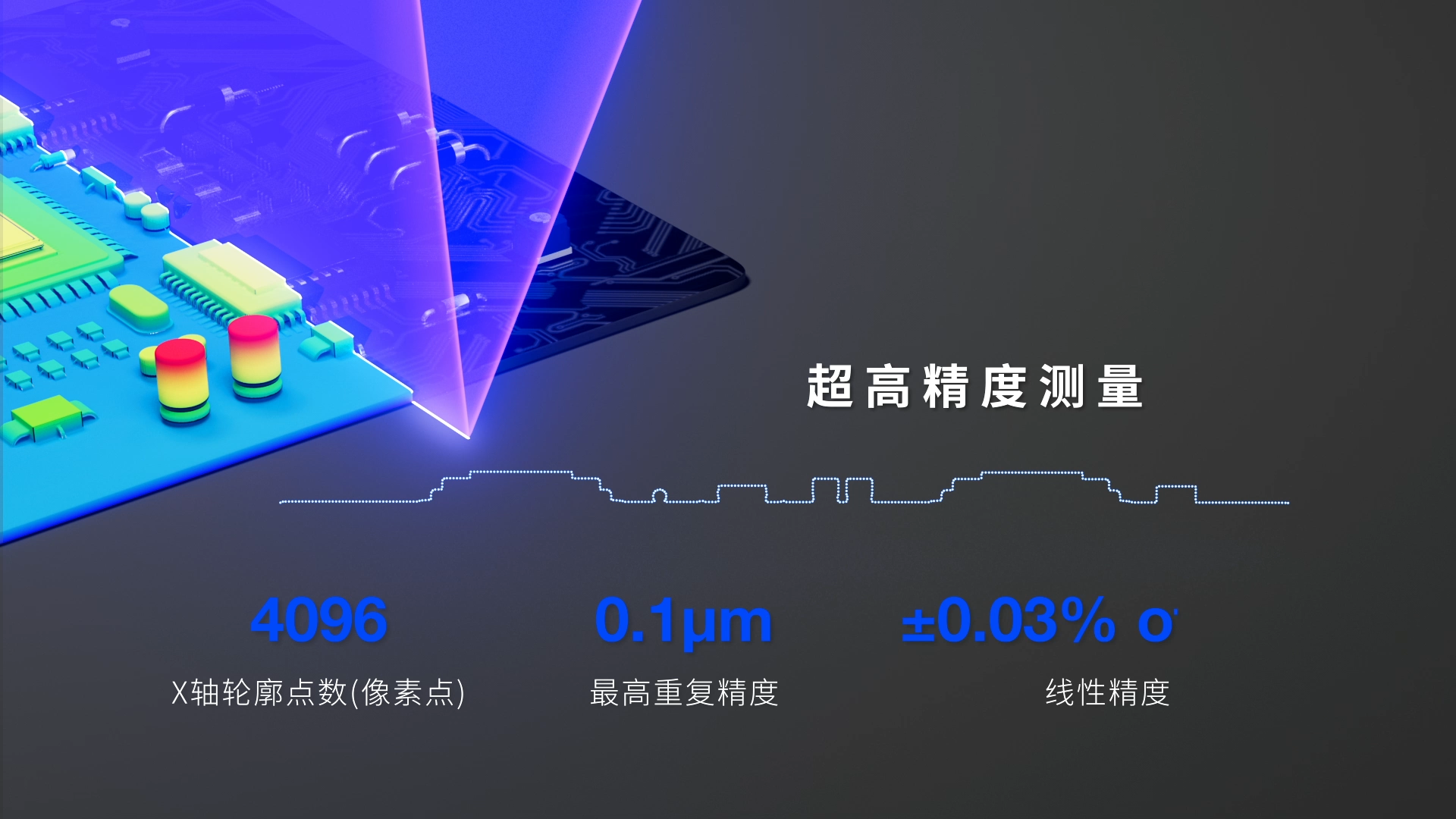
(光子精密GL-8000系列拥有0.1微米的重复精度和±0.03%of F.S.线性精度)
3.视场角(FOV)与视野范围:决定相机可覆盖的空间范围。需匹配物体尺寸,例如:
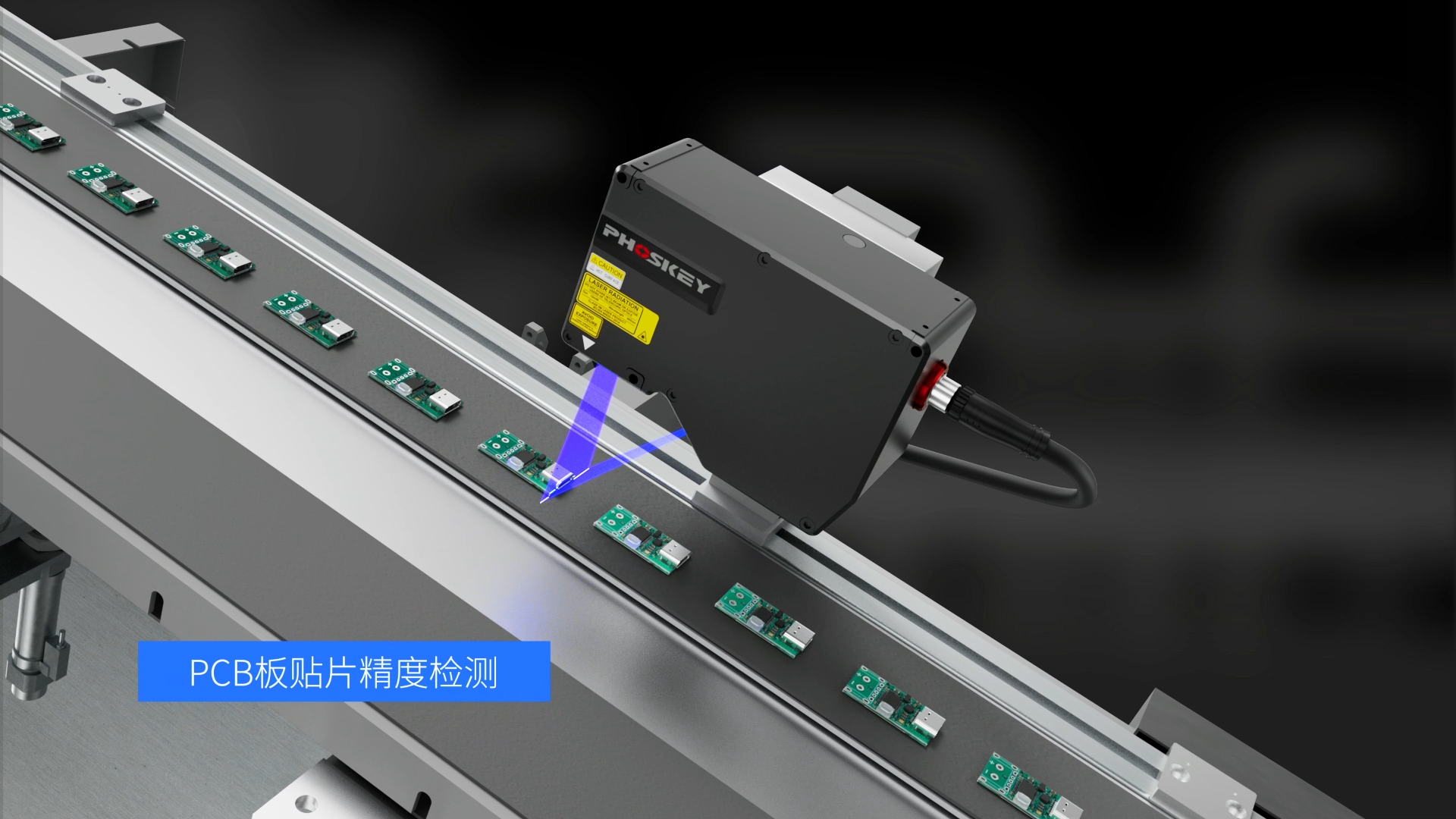
近距离检测(如电路板)需小视野(200×130mm);
大物体(如汽车部件)需大视野(420×250mm)。
4.工作距离:
相机最佳测量距离范围,需与实际安装位置匹配。如:3D线激光轮廓测量仪近距离精度高,适用0.3–1m近距离;,TOF相机适合远距离大场景(如物流体积测量)。
5.帧率
每秒采集3D图像的数量,影响动态场景适应性。高速生产线(如汽车装配)需高帧率(如光子精密GL-8000系列3D线激光轮廓测量仪支持49KHz高速采样)。
6.稳定性
3D工业相机在工件材质,表面结构阴影等复杂情况下的稳定性。结构光相机易受干扰,激光三角法抗干扰性较强 。如光子精密3D线激光轮廓测量仪,拥有高动态范围(HDR)技术适用于复合材质工件的检测,兼容低/高反射率物体,抗干扰性强。且具备IP67防护,可在高粉尘、潮湿、震动环境下稳定运行。
总结
3D工业相机正在推动制造变得更智能、更精准。以后随着光学器件变小、计算架构优化,它还能用在微电子制造、精密医疗器械检测这些新领域。建议企业在选设备时,优先考虑系统的可扩展性和标准化程度,给以后升级留好空间。