yolo位置损失中的权重项的作用是什么
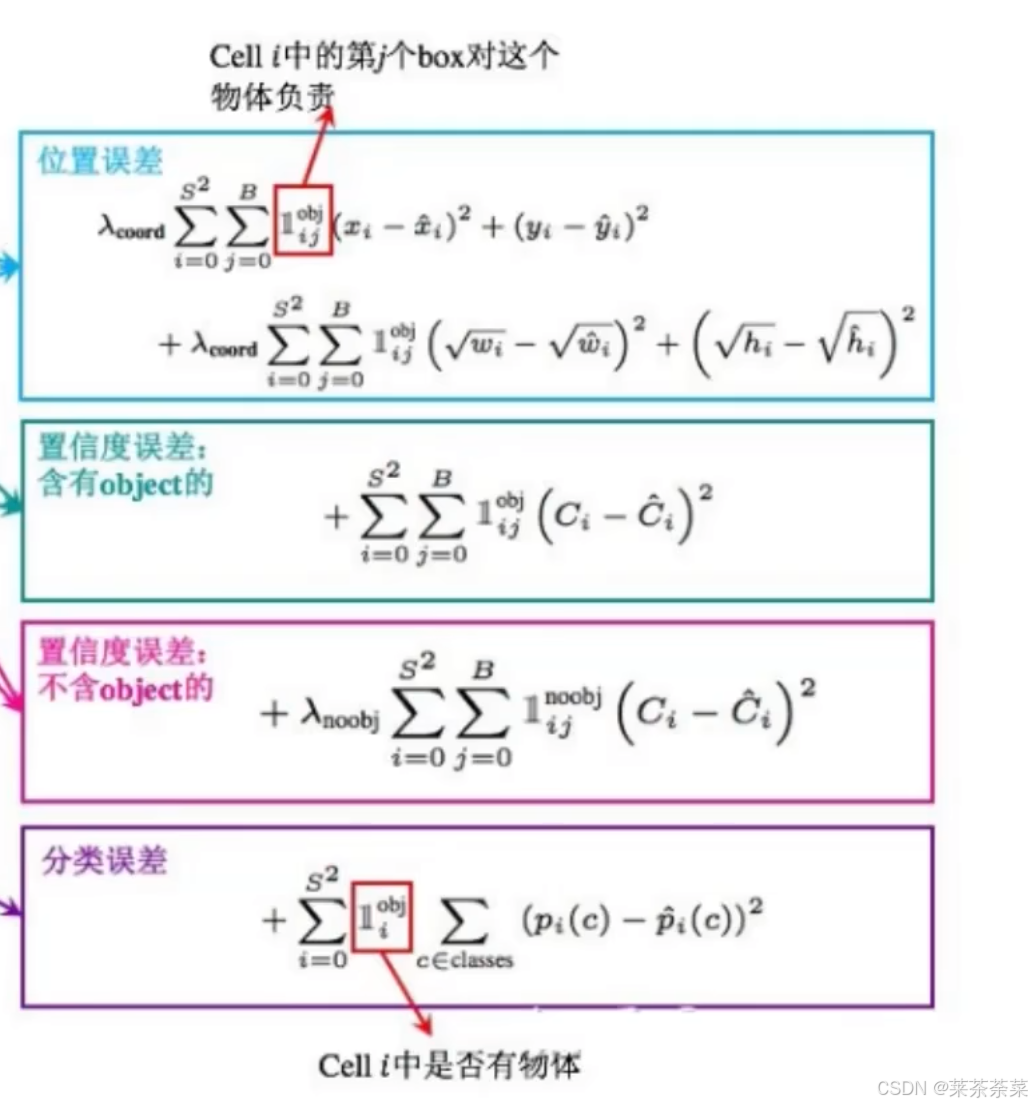
在YOLO(尤其是YOLOv1到YOLOv3)的目标检测损失函数中,位置损失(Localization Loss)的权重项(通常记为λcoordλ_{coord}λcoord是一个关键的超参数,用于平衡不同损失分量(位置、置信度、分类)之间的贡献比例。它的作用主要体现在以下几个方面:
1. 核心作用:平衡损失量级
问题背景:
YOLO的损失函数包含多个部分(位置损失、置信度损失、分类损失),它们的数值量级可能差异很大。例如:
位置损失(坐标误差)通常是平方差(MSE),数值可能较大(如几十到几百)。
分类损失(交叉熵)和置信度损失通常在0~1之间。
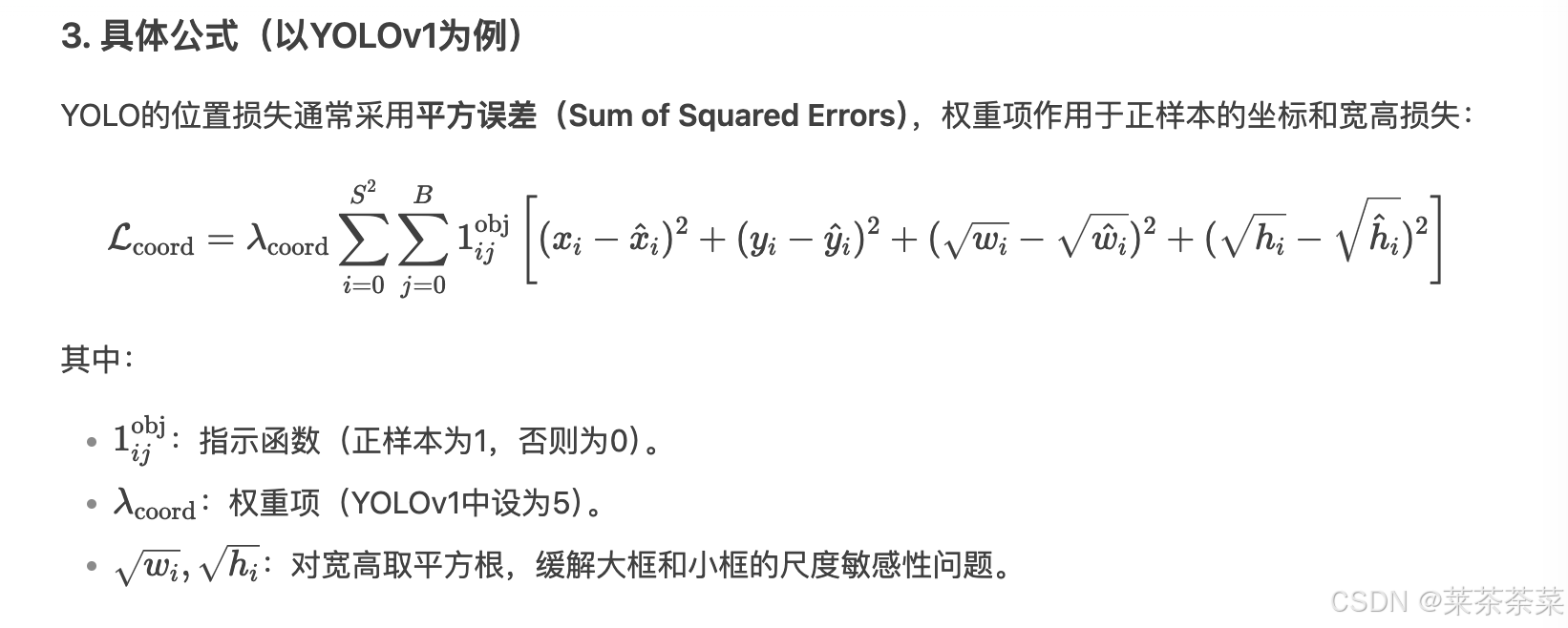
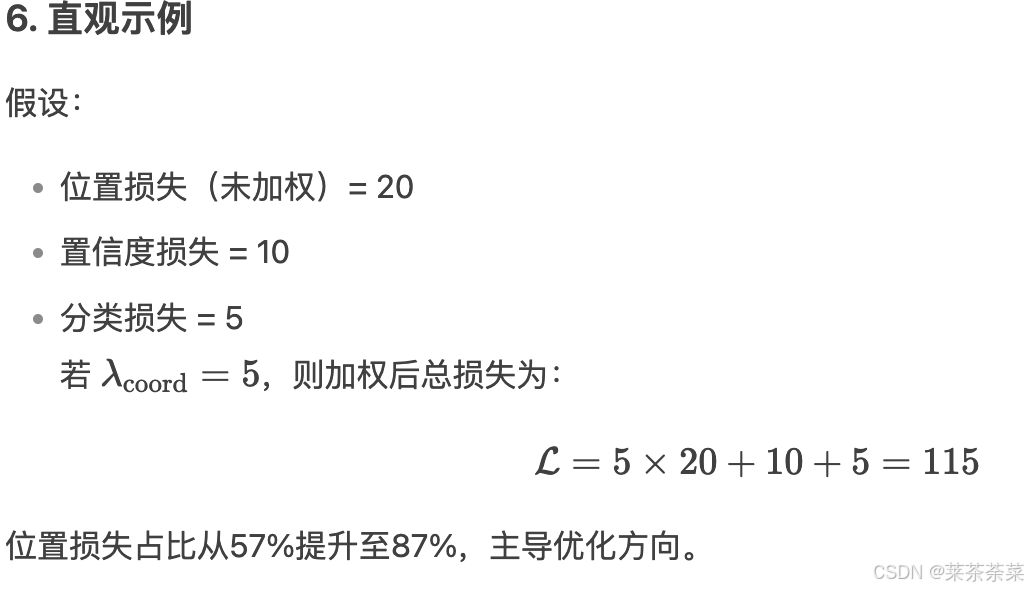
权重项的功能:λcoordλ_{coord}λcoord(通常设为5~10)放大位置损失的权重,迫使模型更优先学习准确的边界框坐标,避免其他损失(如分类)主导优化过程。
2. 解决正负样本不平衡
背景:
一张图像中大部分网格或锚框是负样本(无物体),正样本(有物体)占少数。若不加权重,负样本的置信度损失会主导训练,导致模型忽视位置优化。
权重项的策略:
正样本位置损失加权:对包含物体的预测框(正样本),位置损失乘以 λcoordλ_{coord}λcoord,增强其对总损失的影响。
负样本忽略位置损失:对不包含物体的预测框(负样本),位置损失直接置零(因坐标无意义)。
4. 为什么需要如此大的权重?(如λ=5)
坐标的敏感性:边界框坐标的轻微偏差(如偏移几个像素)可能导致IOU大幅下降,因此需要更强的梯度信号修正。
与其他损失的对比:
置信度损失的权重通常为1(或无权重)。
分类损失的权重通常为1。
若 λcoordλ_{coord}λcoord=1,位置损失可能被其他损失淹没,导致定位不准确。
- 不同YOLO版本的调整
YOLOv1:
λcoordλ_{coord}λcoord=5,直接作用于坐标和宽高损失。
YOLOv2/v3:
引入锚框(Anchor Boxes),位置损失改为基于锚框的偏移量预测(tx, ty, tw, th)。
仍保留权重项,但可能通过其他方式(如Focal Loss)进一步平衡正负样本。
YOLOv4+:可能动态调整权重,或结合CIoU等更高级的损失函数。
总结
核心作用:通过权重项 λcoordλ_{coord}λcoord 放大位置损失的梯度信号,确保模型优先学习准确的边界框定位。
实际意义:
避免负样本或分类损失主导训练。
解决坐标回归的数值量级差异问题。
超参数选择:需根据数据集和模型版本调整(通常5~10)。
这种设计是YOLO能够实现高精度实时检测的关键因素之一。