自动化立体仓库堆垛机控制系统STEP7 OB1功能块
1、堆垛机控制系统STEP7硬件组态如下图
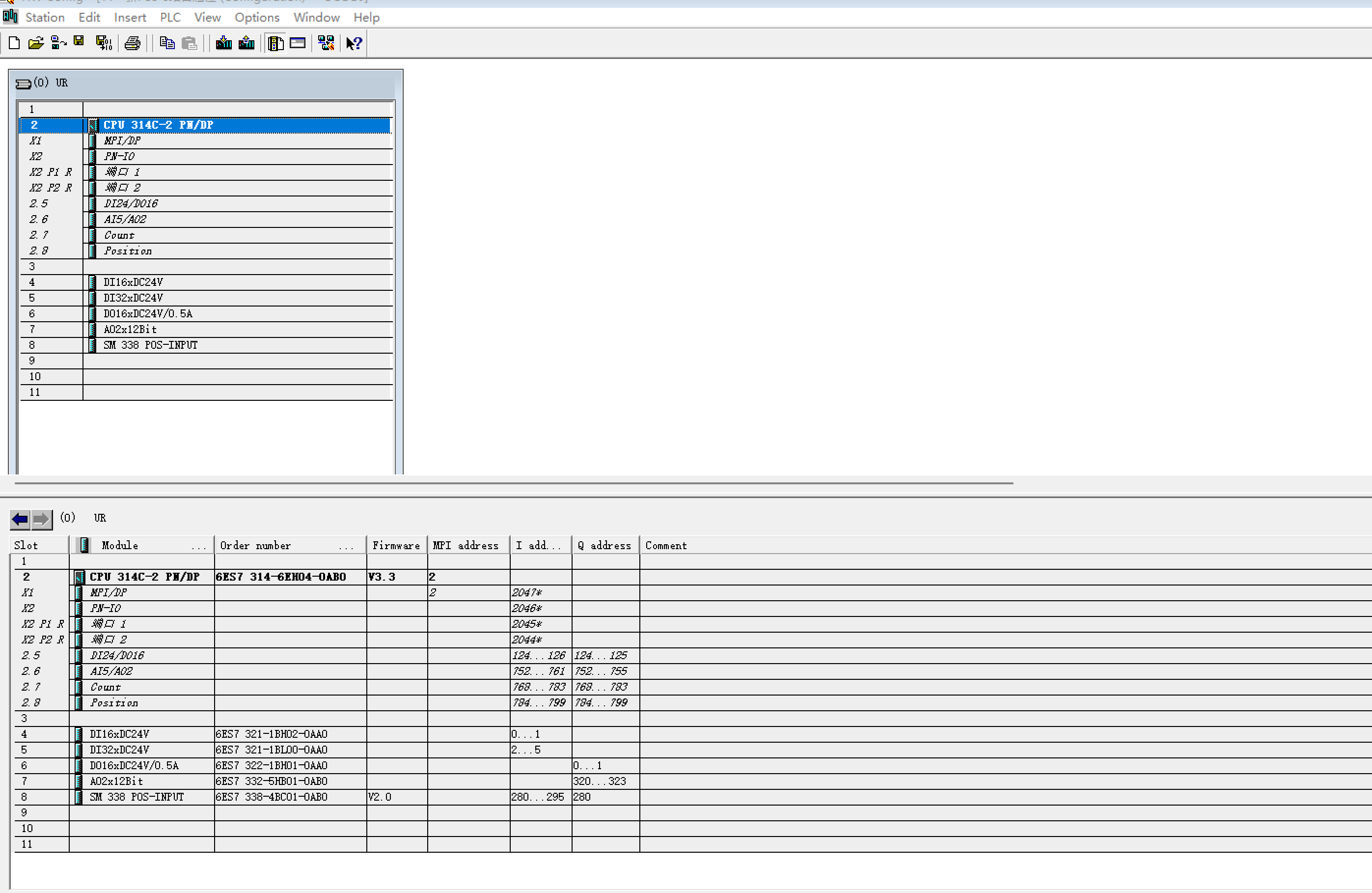
CPU CPU 314C-2 PN/DP 6ES7 314-6EH04-0AB0 SM 338 POS-INPUT
AO2x12Bit 6ES7 332-5HB01-0AB0
2、堆垛机控制系统STEP7内部变量
前进HMI M 0.0 BOOL
后退HMI M 0.1 BOOL
上升HMI M 0.2 BOOL
下降HMI M 0.3 BOOL
左伸HMI M 0.4 BOOL
右伸HMI M 0.5 BOOL
多深选择 M 0.6 BOOL
多叉选择 M 0.7 BOOL
高速HMI M 1.0 BOOL
启动HMI M 1.1 BOOL