【无人机】地面站crazyfile-cfclient免安装方法,Python3.10的整体环境配置打包
【无人机】地面站crazyfile-cfclient免安装方法,Python3.10的整体环境配置打包
更新以gitee为准:
https://gitee.com/Mike_Zhou_Admin/crazyfile-cfclient_install-free
在无人机开源领域 有个名为crazyfile的无人机软件架构
地址为:github.com/bitcraze/crazyflie-firmware
文章目录
- 环境配置
- 环境变量
- 免安装配置
- 安卓包裁剪
- 免安装包
- 附录:crazyfile固件代码功能解读及其线程调度
- 线程分配
- 1. 主线程systemTask
- 2. 主要线程或循环任务
- 主要线程及其功能
- 1. stabilizerTask
- 2. kalmanTask(estimatorKalmanTask)
- 3. CRTP(crtpTask、commTask、commanderTask)
- crtpTask
- commTask
- commanderTask
- 4. proximityTask
- 5. zRangerTask(这里用的是zRanger2Task)
- zRangeTask
- zRanger2Task
- 6. passthroughTask
- 7. appTask(未定义)
- 主要模块功能说明
- 1. MCU驱动层
- 2. 抽象层
- 3. CRTP通讯协议
- 4. DECK
- 5. 电机驱动
- 6. syslink
- 7. radiolink
- 8. NRF51
- 主要传感器及其模块
- 1. IMU BMI088(SPI)
- 初始化阶段关键寄存器操作
- 数据采集阶段关键寄存器
- 2. 气压传感器BMP388(BMP3XX)
- 初始化阶段关键寄存器操作
- 数据采集阶段关键寄存器
- 3. 光流PMW3901
- 4. ToF距离传感器VL53L1X
- 传感器模块的应用
- BMI088和BMP388(sensors)
- 1. 硬件接口层 (sensors_bmi088_spi.c)
- 2. 数据抽象层 (sensors.c)
- 3. 控制应用层
- 4. 开发聚焦点
- 光流PMW3901(flowdeck_v1v2)
- 1. 数据采集与预处理
- 2. 测量值封装
- 3. 状态估计集成
- 4. 可配置性
- 5. 关键函数链
- 6. 硬件接口层 (flowdeck_v1v2.c)
- 7. 数据抽象层
- 8. 控制应用层
- 9. 开发聚焦点
- 多距离VL53L1X (multiranger)
- 1. 传感器功能实现
- 2. 应用场景
- 3. 硬件接口层
- 4. 数据处理层
- 5. 控制应用层
- 6. 关键函数链
- 7. 开发聚焦点
- 8. 方向应用
- 下方向VL53L1X (zranger2_deck)
- 1. 功能实现
- 2. 与其他数据的融合
- 3. 硬件接口层
- 4. 数据处理层
- 5. 控制应用层
- 6. 开发聚焦点
环境配置
运行cfclient 需要Python3.10环境 并安装cfclient 库
所需的plp list如下:
Package Version
----------------------------- ---------------
alabaster 0.7.12
anaconda-client 1.11.2
anaconda-navigator 2.4.0
anaconda-project 0.11.1
anyio 3.5.0
appdirs 1.4.4
argon2-cffi 21.3.0
argon2-cffi-bindings 21.2.0
arrow 1.2.3
astroid 2.14.2
astropy 5.1
asttokens 2.0.5
atomicwrites 1.4.0
attrs 22.1.0
Automat 20.2.0
autopep8 1.6.0
Babel 2.11.0
backcall 0.2.0
backports.functools-lru-cache 1.6.4
backports.tempfile 1.0
backports.weakref 1.0.post1
bcrypt 3.2.0
beautifulsoup4 4.11.1
binaryornot 0.4.4
black 22.6.0
bleach 4.1.0
bokeh 2.4.3
boltons 23.0.0
Bottleneck 1.3.5
brotlipy 0.7.0
certifi 2022.12.7
cfclient 2024.2
cffi 1.15.1
cflib 0.1.25.1
chardet 4.0.0
charset-normalizer 2.0.4
click 8.0.4
cloudpickle 2.0.0
clyent 1.2.2
colorama 0.4.6
colorcet 3.0.1
comm 0.1.2
conda 23.3.1
conda-build 3.24.0
conda-content-trust 0.1.3
conda-pack 0.6.0
conda-package-handling 2.0.2
conda_package_streaming 0.7.0
conda-repo-cli 1.0.41
conda-token 0.4.0
conda-verify 3.4.2
constantly 15.1.0
contourpy 1.0.5
cookiecutter 1.7.3
cryptography 39.0.1
cssselect 1.1.0
cycler 0.11.0
cytoolz 0.12.0
daal4py 2023.0.2
dask 2022.7.0
datashader 0.14.4
datashape 0.5.4
debugpy 1.5.1
decorator 5.1.1
defusedxml 0.7.1
diff-match-patch 20200713
dill 0.3.6
distributed 2022.7.0
docstring-to-markdown 0.11
docutils 0.18.1
entrypoints 0.4
et-xmlfile 1.1.0
executing 0.8.3
fastjsonschema 2.16.2
filelock 3.9.0
flake8 6.0.0
Flask 2.2.2
flit_core 3.6.0
fonttools 4.25.0
freetype-py 2.5.1
fsspec 2022.11.0
fst-pso 1.8.1
future 0.18.3
FuzzyTM 2.0.9
gensim 4.3.0
glob2 0.7
greenlet 2.0.1
h5py 3.7.0
HeapDict 1.0.1
holoviews 1.15.4
hsluv 5.0.4
huggingface-hub 0.10.1
hvplot 0.8.2
hyperlink 21.0.0
idna 3.4
imagecodecs 2021.8.26
imageio 2.26.0
imagesize 1.4.1
imbalanced-learn 0.10.1
importlib-metadata 4.11.3
importlib_resources 6.5.2
incremental 21.3.0
inflection 0.5.1
iniconfig 1.1.1
intake 0.6.7
intervaltree 3.1.0
ipykernel 6.19.2
ipython 8.10.0
ipython-genutils 0.2.0
ipywidgets 7.6.5
isort 5.9.3
itemadapter 0.3.0
itemloaders 1.0.4
itsdangerous 2.0.1
jedi 0.18.1
jellyfish 0.9.0
Jinja2 3.1.2
jinja2-time 0.2.0
jmespath 0.10.0
joblib 1.1.1
json5 0.9.6
jsonpatch 1.32
jsonpointer 2.1
jsonschema 4.17.3
jupyter 1.0.0
jupyter_client 7.3.4
jupyter-console 6.6.2
jupyter_core 5.2.0
jupyter-server 1.23.4
jupyterlab 3.5.3
jupyterlab-pygments 0.1.2
jupyterlab_server 2.19.0
jupyterlab-widgets 1.0.0
keyring 23.4.0
kiwisolver 1.4.4
lazy-object-proxy 1.6.0
libarchive-c 2.9
libusb-package 1.0.26.3
llvmlite 0.44.0
locket 1.0.0
lxml 4.9.1
lz4 3.1.3
Markdown 3.4.1
MarkupSafe 2.1.1
matplotlib 3.7.0
matplotlib-inline 0.1.6
mccabe 0.7.0
menuinst 1.4.19
miniful 0.0.6
mistune 0.8.4
mkl-fft 1.3.1
mkl-random 1.2.2
mkl-service 2.4.0
mock 4.0.3
mpmath 1.2.1
msgpack 1.0.3
multipledispatch 0.6.0
munkres 1.1.4
mypy-extensions 0.4.3
navigator-updater 0.3.0
nbclassic 0.5.2
nbclient 0.5.13
nbconvert 6.5.4
nbformat 5.7.0
nest-asyncio 1.5.6
networkx 2.8.4
nltk 3.7
notebook 6.5.2
notebook_shim 0.2.2
numba 0.61.2
numexpr 2.8.4
numpy 1.24.4
numpydoc 1.5.0
openpyxl 3.0.10
packaging 24.2
pandas 1.5.3
pandocfilters 1.5.0
panel 0.14.3
param 1.12.3
paramiko 2.8.1
parsel 1.6.0
parso 0.8.3
partd 1.2.0
pathlib 1.0.1
pathspec 0.10.3
patsy 0.5.3
pep8 1.7.1
pexpect 4.8.0
pickleshare 0.7.5
Pillow 9.4.0
pip 25.1.1
pkginfo 1.9.6
platformdirs 2.5.2
plotly 5.9.0
pluggy 1.0.0
ply 3.11
pooch 1.4.0
poyo 0.5.0
prometheus-client 0.14.1
prompt-toolkit 3.0.36
Protego 0.1.16
psutil 5.9.0
ptyprocess 0.7.0
pure-eval 0.2.2
py 1.11.0
pyasn1 0.4.8
pyasn1-modules 0.2.8
pycodestyle 2.10.0
pycosat 0.6.4
pycparser 2.21
pyct 0.5.0
pycurl 7.45.1
PyDispatcher 2.0.5
pydocstyle 6.3.0
pyerfa 2.0.0
pyflakes 3.0.1
pyFUME 0.3.4
Pygments 2.11.2
PyHamcrest 2.0.2
PyJWT 2.4.0
pylint 2.16.2
pylint-venv 2.3.0
pyls-spyder 0.4.0
PyNaCl 1.5.0
pyodbc 4.0.34
PyOpenGL 3.1.9
pyOpenSSL 23.0.0
pyparsing 3.0.9
PyQt5 5.15.7
PyQt5-sip 12.11.0
PyQt6 6.7.1
PyQt6-Qt6 6.7.3
PyQt6_sip 13.10.0
pyqtgraph 0.13.7
PyQtWebEngine 5.15.4
pyrsistent 0.18.0
PySDL2 0.9.17
pysdl2-dll 2.24.0
pyserial 3.5
PySocks 1.7.1
pytest 7.1.2
python-dateutil 2.8.2
python-lsp-black 1.2.1
python-lsp-jsonrpc 1.0.0
python-lsp-server 1.7.1
python-slugify 5.0.2
python-snappy 0.6.1
pytoolconfig 1.2.5
pytz 2022.7
pyusb 1.3.1
pyviz-comms 2.0.2
PyWavelets 1.4.1
pywin32 305.1
pywin32-ctypes 0.2.0
pywinpty 2.0.10
PyYAML 6.0.2
pyzmq 25.1.2
QDarkStyle 3.0.2
qstylizer 0.2.2
QtAwesome 1.2.2
qtconsole 5.4.0
QtPy 2.2.0
queuelib 1.5.0
regex 2022.7.9
requests 2.28.1
requests-file 1.5.1
requests-toolbelt 0.9.1
rope 1.7.0
Rtree 1.0.1
ruamel.yaml 0.17.21
ruamel.yaml.clib 0.2.6
ruamel-yaml-conda 0.17.21
scikit-image 0.19.3
scikit-learn 1.2.1
scikit-learn-intelex 20230228.214818
scipy 1.10.1
Scrapy 2.8.0
seaborn 0.12.2
Send2Trash 1.8.0
service-identity 18.1.0
setuptools 65.6.3
simpful 2.12.0
sip 6.6.2
six 1.16.0
smart-open 5.2.1
sniffio 1.2.0
snowballstemmer 2.2.0
sortedcontainers 2.4.0
soupsieve 2.3.2.post1
Sphinx 5.0.2
sphinxcontrib-applehelp 1.0.2
sphinxcontrib-devhelp 1.0.2
sphinxcontrib-htmlhelp 2.0.0
sphinxcontrib-jsmath 1.0.1
sphinxcontrib-qthelp 1.0.3
sphinxcontrib-serializinghtml 1.1.5
spyder 5.4.1
spyder-kernels 2.4.1
SQLAlchemy 1.4.39
stack-data 0.2.0
statsmodels 0.13.5
sympy 1.11.1
tables 3.7.0
tabulate 0.8.10
TBB 0.2
tblib 1.7.0
tenacity 8.0.1
terminado 0.17.1
text-unidecode 1.3
textdistance 4.2.1
threadpoolctl 2.2.0
three-merge 0.1.1
tifffile 2021.7.2
tinycss2 1.2.1
tldextract 3.2.0
tokenizers 0.11.4
toml 0.10.2
tomli 2.0.1
tomlkit 0.11.1
toolz 0.12.0
torch 1.12.1
tornado 6.1
tqdm 4.64.1
traitlets 5.7.1
transformers 4.24.0
Twisted 22.2.0
twisted-iocpsupport 1.0.2
typing_extensions 4.4.0
ujson 5.4.0
Unidecode 1.2.0
urllib3 1.26.14
vispy 0.13.0
w3lib 1.21.0
watchdog 2.1.6
wcwidth 0.2.5
webencodings 0.5.1
websocket-client 0.58.0
Werkzeug 2.2.2
whatthepatch 1.0.2
wheel 0.38.4
widgetsnbextension 3.5.2
win-inet-pton 1.1.0
wincertstore 0.2
wrapt 1.14.1
xarray 2022.11.0
xlwings 0.29.1
yapf 0.31.0
zict 2.1.0
zipp 3.11.0
zope.interface 5.4.0
zstandard 0.19.0
安装好后 在Python库安装目录下 即能看到cfclient的exe文件
环境变量
所用到的环境变量即为Python环境变量:
D:\Project\cfclient\cfclient_Anaconda
D:\Project\cfclient\cfclient_Anaconda\Library\mingw-w64\bin
D:\Project\cfclient\cfclient_Anaconda\Library\usr\bin
D:\Project\cfclient\cfclient_Anaconda\Library\bin
D:\Project\cfclient\cfclient_Anaconda\Scripts
只要有这些 就能正常运行地面站
免安装配置
如果要免安装 则需要将整个Python环境打包
并通过脚本来指定运行目录
脚本如下:
@echo off
setlocal
echo Setting environment path...
set "ROOT=%~dp0cfclient_Anaconda":: Environment validation
if not exist "%ROOT%\python.exe" (echo Error: Python not found in %ROOT%pauseexit /b 1
):: Path cleaning and priority adjustment
set "CLEANED_PATH=%PATH:Anaconda3=%"
set "CLEANED_PATH=%CLEANED_PATH:WindowsApps=%"
set "PATH=%ROOT%;%ROOT%\Scripts;%ROOT%\Library\bin;%ROOT%\DLLs;%ROOT%\Library\mingw-w64\bin;%CLEANED_PATH%"rem Set Python environment
set "PYTHONHOME=%ROOT%"
set "PYTHONPATH=%ROOT%\Lib;%ROOT%\Lib\site-packages":: Debugging commands
echo [DEBUG] Python path verification
echo Expected path: %ROOT%\python.exe
where python
"%ROOT%\python.exe" --versionecho Executing CFClient...
start "" /wait "%ROOT%\python.exe" -m cfclient.gui || (echo [ERROR] Launch failed with code: %errorlevel%pauseexit /b %errorlevel%
)pause
endlocal
脚本需要放置在与Python环境anaconda目录同级目录下
安卓包裁剪
安装包比较大 但可以通过裁剪来实现缩小 把不需要的库删掉
可以执行以下脚本:
# 进入项目目录
cd /d D:\Project\cfclient# 保留的核心目录
# Python核心
- cfclient_Anaconda/DLLs
- cfclient_Anaconda/Lib
- cfclient_Anaconda/Scripts
- cfclient_Anaconda/python.exe# 依赖库核心
- cfclient_Anaconda/Library/bin
- cfclient_Anaconda/Library/lib
- cfclient_Anaconda/Library/include# 可删除的目录(约节省2-4GB)
rmdir /s /q cfclient_Anaconda\\conda-meta
rmdir /s /q cfclient_Anaconda\\pkgs
rmdir /s /q cfclient_Anaconda\\Menu
rmdir /s /q cfclient_Anaconda\\Resources
rmdir /s /q cfclient_Anaconda\\Tools# 可删除的文件
del /q cfclient_Anaconda\\*.txt
del /q cfclient_Anaconda\\*.bat
del /q cfclient_Anaconda\\*.ico# 选择性删除的目录(若不需要开发功能)
rmdir /s /q cfclient_Anaconda\\Lib\\test # Python标准库测试套件
rmdir /s /q cfclient_Anaconda\\Lib\\site-packages\\*.dist-info # 元数据文件
rmdir /s /q cfclient_Anaconda\\Lib\\site-packages\\*.egg-info
另外 在配置安装阶段 也可以通过把不需要的库卸载来实现
免安装包
见gitee

附录:crazyfile固件代码功能解读及其线程调度
在无人机开源领域 有个名为crazyfile的无人机软件架构
地址为:github.com/bitcraze/crazyflie-firmware
线程分配
1. 主线程systemTask
main函数建立主线程systemTask,该线程完成了其他各线程的初始化及调度。
默认主要实现的功能:
- LED初始化
- 定时器初始化
- I2C初始化
- 透传初始化及其线程分配
- high-levels modules初始化及其线程分配
- 卡尔曼滤波器初始化及其线程分配
- 内存初始化
- 系统链路数据包接收队列开启及其扩展板子系统初始化
- SoundTimer软件定时器
- CRTP内存队列模块初始化及其内存管理线程
- 系统各模块测试及其log信息打印
- 测试通过则开启系统、使能看门狗等,随后进入到workerLoop
- 测试未通过则重新进行systemTest,若通过,可使用systemTest强制启动;若未通过则亮红灯,并进入到workerLoop
其余几项由宏定义选择性调用: - 队列监控软件定时器
- 串口1的debug打印初始化
- errorUkfTask线程,误差状态无迹卡尔曼滤波器初始化
- proximity线程,靠近传感器及滑动窗口初始化
2. 主要线程或循环任务
| 线程名称 | 优先级或循环时间 | 创建函数 | 宏定义选择开启 | 功能描述 | 所属分类 |
|---|---|---|---|---|---|
| systemTask | SYSTEM_TASK_PRI | systemLaunch | - | 系统主控线程,负责总初始化流程 | 主线程 |
| usblinkTask | USBLINK_TASK_PRI | usblinkInit | - | USB通信协议处理 | 基础服务线程 |
| sysLoadTask | TIMER_PERIOD(默认1000) | sysLoadInit | - | 系统负载监控 | - |
| crtpTask (crtpTxTask、crtpRxTask) | CRTP_TX_TASK_PRI CRTP_RX_TASK_PRI | crtpInit | - | CRTP服务 | 通信协议栈 |
| commTask (crtpSrvTask、platformSrvTask、syslinkTask、paramTask) | CRTP_SRV_TASK_PRI PLATFORM_SRV_TASK_PRI SYSLINK_TASK_PRI PARAM_TASK_PRI | commInit | - | CRTP无线通信协议处理 | - |
| commanderTask (crtpCommanderHighLevelTask) | CMD_HIGH_LEVEL_TASK_PRI | commanderInit | - | 遥控指令解析与分发 | - |
| proximityTask | PROXIMITY_TASK_PRI | proximityInit | PROXIMITY_ENABLED | 接近传感器数据处理 | 传感器处理线程 |
| estimatorKalmanTask (kalmanTask) | KALMAN_TASK_PRI | estimatorKalmanTaskInit | CONFIG_ESTIMATOR_KALMAN_ENABLE | 卡尔曼滤波算法 | 核心算法线程 |
| errorUkfTask | ERROR_UKF_TASK_PRI | errorEstimatorUkfTaskInit | CONFIG_ESTIMATOR_UKF_ENABLE | UKF估计算法 | - |
| memTask | MEM_TASK_PRI | crtpMemInit | - | 内存管理服务 | 设备管理 |
| stabilizerTask | STABILIZER_TASK_PRI | stabilizerInit | - | 姿态稳定控制 | - |
| passthroughTask | PASSTHROUGH_PRI | passthroughInit | - | 电机电调烧录控制 | 扩展模块 |
| appTask | CONFIG_APP_PRIORITY | appInit | CONFIG_APP_ENABLE | 用户应用(未定义) | - |
| zRangerTask (zRanger2Task) | ZRANGER_TASK_PRI (ZRANGER2_TASK_PRI) | zRangerInit (由DECK_DRIVER注册) (zRanger2Init) | - | 激光测距扩展板 | - |
| SoundTimer | 10ms | soundInit | - | 蜂鸣器音效控制 | 定时器任务 |
| queueMonitorTimer | TIMER_PERIOD(默认1000) | queueMonitorInit | CONFIG_DEBUG_QUEUE_MONITOR | 队列监控 | - |
主要线程及其功能
1. stabilizerTask
飞控系统控制相关的核心线程。
在系统启动同步后进入1kHz实时控制循环,首先通过sensorsWaitDataReady()等待IMU传感器数据就绪,调用sensorsAcquire()获取加速度计/陀螺仪原始数据;随后进行状态估计(stateEstimator()解算飞行姿态)、处理遥控指令生成设定点(commanderGetSetpoint()),通过安全监控模块(supervisorUpdate())检查电池/通信状态,调用PID控制算法(controller())计算电机推力,执行带电压补偿的PWM输出(controlMotors());最后压缩日志数据(compressState())并通过xSemaphoreGive()释放信号量触发频率监控任务(rateSupervisorTask),同时处理避障指令覆盖和异常状态急停,完成从数据采集到电机驱动的全闭环控制。
这里会建立一个子线程rateSupervisorTask:飞控系统的稳定器循环监控线程,在系统启动后创建监控信号量(xRateSupervisorSemaphore),通过阻塞等待实时监测稳定器主循环(1000Hz)的执行间隔,当检测到超时(2秒未执行)或频率偏移(±3Hz)时触发系统警告,并通过断言强制停机保障飞行安全,同时智能区分传感器暂停状态(isSensorsSuspended)避免误报警
如果开启避障功能,proximityTask线程会进行近距离测量,在stabilizerTask线程中会调用collisionAvoidanceUpdateSetpoint,进行避障操作。
2. kalmanTask(estimatorKalmanTask)
飞控系统的卡尔曼滤波核心线程。
在系统启动后进入实时状态估计循环,首先通过xSemaphoreTake()等待来自稳定器线程的信号量触发计算周期,获取加速度计和陀螺仪的子采样数据(axis3fSubSamplerFinalize),执行卡尔曼预测步骤(kalmanCorePredict)推算飞行器状态;随后处理队列中的多源测量数据(TDOA/光流/TOF等),调用kalmanCoreUpdateWith*系列函数进行测量更新;最后通过协方差检查(kalmanSupervisorIsStateWithinBounds)确保估计值有效性,并通过互斥锁保护将最终状态(kalmanCoreExternalizeState)输出给稳定器线程。整个流程严格控制在100Hz频率,实现从传感器原始数据到高精度姿态/位置估计的实时解算。
3. CRTP(crtpTask、commTask、commanderTask)
crtpTask
实时传输协议(CRTP)的初始化核心。
在系统启动阶段创建双线程通信架构(TX/RX任务),初始化全局发送队列(txQueue)和端口接收队列(queues[16]),建立基于优先级队列的通信调度机制,为后续无线/USB等通信链路提供协议栈支持,同时集成统计模块实时监控数据吞吐量。
这里建立了两个子线程,crtpTxTask和crtpRxTask。
- crtpTxTask:CRTP 协议栈的数据发送核心线程。从全局发送队列(txQueue)阻塞接收待发送数据包,通过动态绑定的通信链路(无线电/USB)执行数据发送,在链路拥塞时自动进行10ms间隔重试,同时统计发送速率并通过日志系统实时上报,保障控制指令和日志数据的可靠传输。
- crtpRxTask:CRTP 协议栈的数据接收核心线程。通过动态绑定的通信链路(无线电/USB)持续接收数据包,根据端口号(p.port)将数据包分发至对应接收队列(queues[16])或触发注册的回调函数(callbacks[16]),同时统计接收速率并通过日志系统实时上报,实现多通道数据解耦处理。
commTask
飞控系统的通信调度核心线程。
在系统启动时初始化多协议通信栈(CRTP/USB/Radio),建立与地面站/遥控器的无线连接,通过优先级调度管理控制指令(CRTP包)、参数同步、日志传输等多类数据流。其实时监听UART/2.4GHz无线电等硬件接口,解析并分发来自外部的飞行控制指令至指挥官模块,同时将传感器数据/状态信息通过压缩协议回传地面站,并处理通信中断时的故障切换逻辑。
这里新建了四个线程,分别为crtpSrvTask、platformSrvTask、syslinkTask、paramTask。
- crtpSrvTask:CRTP 协议服务核心线程,在系统启动后创建专用通信队列(CRTP_PORT_LINK),通过阻塞式接收(crtpReceivePacketBlock)监听来自地面站的 CRTP 指令包,根据数据包通道类型执行回显测试(Echo)、设备标识查询(Source)或数据接收黑洞(Sink)操作。其实时处理链路层控制指令,支持通过 echoDelay 参数动态配置回显延迟,并通过互斥锁保障多线程通信安全,完整实现 CRTP 协议的基础服务功能。
- platformSrvTask:飞控系统的平台服务核心线程,在系统启动后创建专用服务端口(CRTP_PORT_PLATFORM),通过阻塞式接收(crtpReceivePacketBlock)监听来自地面站的平台控制指令,根据数据包通道类型执行射频模式设置(ContinuousWave)、系统上电状态管理(armSystem)、固件版本查询(versionCommand)等关键操作。其实时处理硬件级控制请求,并通过Syslink协议与底层硬件交互,保障系统安全状态切换和平台信息透明化。
- syslinkTask:飞控系统的无线通信核心线程。在系统启动后创建专用通信队列,通过阻塞接收(uartslkGetPacketBlocking)持续监听NRF51协处理器发来的Syslink协议数据包,根据协议头(SYSLINK_RADIO_GROUP/SYSLINK_PM_GROUP等)将数据包路由至对应子系统(无线电控制/电源管理/调试信息等),同时通过互斥锁保障多线程通信安全,实现STM32与NRF51间全双工通信。
- paramTask:飞控系统的参数管理核心线程。在系统启动后创建专用参数端口(CRTP_PORT_PARAM),通过阻塞接收(crtpReceivePacketBlock)解析来自地面站的参数操作指令,执行参数目录查询(TOC)、实时读写(Read/Write)、持久化存储(Persistent Store)等操作,并通过互斥锁保障多线程访问安全,完整实现飞控参数的动态配置与生命周期管理。
commanderTask
crtpCommanderHighLevelTask 是高层指令处理核心线程。
通过CRTP协议接收地面站的高层飞行指令(起飞/降落/轨迹跟踪),解析后调用运动规划器生成平滑轨迹。其实时响应包括:垂直起降速度控制、三维空间点对点运动插值、预定义轨迹加载执行,并通过互斥锁保障与状态估计线程的安全交互。
4. proximityTask
飞控系统的近距感知核心线程,用于测距数据上报。
在系统启动后初始化滑动窗口滤波器(proximitySWin),以 20Hz 固定频率(PROXIMITY_TASK_FREQ)通过 maxSonarReadDistance() 读取 MaxBotix 传感器原始距离数据,执行滑动窗口均值滤波(proximitySWinAdd)和中值滤波(proximitySWinMedian),最终输出三重有效距离值(瞬时/均值/中值)并通过日志系统实时上传,为避障模块提供可靠的环境感知数据。
如果开启避障功能,则在stabilizerTask线程中会调用collisionAvoidanceUpdateSetpoint,进行避障操作。
5. zRangerTask(这里用的是zRanger2Task)
该线程的初始化函数由DECK_DRIVER注册。
zRangeTask
zranger主要是使用VL53L0X模块来进行测距。
VL53L0X 激光测距模块的专用驱动线程。在系统启动后初始化 TOF 传感器(vl53l0xInit),配置连续测量模式(100Hz 采样率),通过 vl53l0xReadRangeContinuousMillimeters() 获取原始距离数据,执行异常值过滤(>3m 视为无效),最终将有效测量值(单位:米)通过 rangeEnqueueDownRangeInEstimator() 注入卡尔曼滤波器,同时更新全局距离状态供避障模块使用。
zRanger2Task
对于zranger2,则是使用VL53L1X模块来进行测距。该线程所使用的测距结果应用在无人机的正下方方向。
主要实现功能为:
- 传感器初始化:通过 vl53l1xInit 函数初始化 VL53L1X 传感器(在 zRanger2Init 中完成),配置中距离模式(VL53L1_DISTANCEMODE_MEDIUM)和 25ms 测量周期(VL53L1_SetMeasurementTimingBudgetMicroSeconds),实现 40Hz 的实际采样率
- 周期性测量:每 25ms(由 M2T(25) 定时)通过 zRanger2GetMeasurementAndRestart 获取原始毫米级数据,该函数内部通过 VL53L1_GetRangingMeasurementData 读取传感器数据,并在每次测量后自动重启设备(VL53L1_StopMeasurement + VL53L1_StartMeasurement)
- 异常值过滤:通过 RANGE_OUTLIER_LIMIT (5000mm/5m) 阈值过滤传感器异常值(代码中注释提到传感器最大有效量程为 5m,但实际异常值常表现为 >8m)
- 数据预处理:将毫米级原始数据转换为米(0.001f),并基于指数噪声模型计算动态标准差(expStdA(1+exp(expCoeff*(d-expPointA)))),该模型在 2.5m 时标准差 0.0025m,4m 时增长到 0.2m
- 数据融合:通过 rangeEnqueueDownRangeInEstimator 将带噪声评估的距离值注入卡尔曼滤波器(在 src/modules/src/range_kalman.c 中实现),同时通过 rangeSet 更新全局 rangeDown 状态(定义在 src/modules/interface/range.h),供避障模块和高度控制模块使用
6. passthroughTask
飞控系统的 ESC(无刷电机电调) 固件烧录核心线程。在收到上位机烧录指令后(通过 USB VCP 虚拟串口),首先与 BLHeli 配置工具进行 MSP 协议握手(blHeliConfigHandshake),随后暂停 UART 接收中断和传感器数据采集(uartslkPauseRx/sensorsSuspend),初始化 4-way 接口进入 ESC 编程模式(esc4wayInit),最终通过位翻转协议(Bit-Banging)完成 ESC 固件烧录或参数配置,全程保障飞行器处于安全状态。
7. appTask(未定义)
该线程为用户自己定义的app线程,目前尚未定义。
主要模块功能说明
1. MCU驱动层
原本的MCU驱动层相关代码都被抽象到了应用层,比如I2C。
驱动层相关的配置代码与MCU有关,其代码多在src/drivers/src目录下
若引脚发生变化,芯片选型改变等,就需要重新构建驱动层相关部分的代码结构。
以下为常见使用的几个外设。
LED
抽象后的应用层操作函数为ledSet。
I2C
其驱动层代码在i2c_drv.c中,初始化时的应用层则在i2cdev中。
通过调用底层驱动i2cdrvInit()初始化指定I2C总线(I2C1/I2C3)的时钟、GPIO复用模式和中断配置,建立总线仲裁机制与超时重试策略,为上层传感器/扩展设备提供标准化的读写接口。
UART
其驱动层代码在uart_syslink中。在commInit、passthroughInit等中都有对UART的调用。
SPI
在deck、nf24l01、bmi088、fatfs等中,均有使用。
2. 抽象层
抽象层代码则在src/hal/src目录下,其主要实现的是相关传感器、外部芯片的数据读取、调度等。
抽象层需要调用到驱动层相关函数。
如syslink、sensors、imu等。
3. CRTP通讯协议
通讯协议架构:
CRTP(应用层协议) ↔ radiolink(传输层) ↔ syslink(硬件链路层) ↔ NRF51(射频芯片与STM32交互)
驱动层通过radiolinkOp结构体实现多链路兼容,当调用radiolinkSendCRTPPacket()时,将CRTP数据包封装为Syslink协议格式,通过NRF51射频模块发送,同时crtpRxTask()线程以100Hz频率轮询接收队列,根据数据包头的端口号(p.port字段)将数据分发至对应处理通道。
CRTP通讯协议主要由CRTPPort标志及其crtpReceivePacketBlock函数来实现通讯接收,最终接收的数据存放在CRTPPacket类型变量中。
在进行接收之前要通过crtpInitTaskQueue添加CRTPPort标志到队列中。
若是要新增其他的通讯功能,则可以定义一个新的标志,并且通过一个新建的线程来接收该标志的数据。
在初始化中,USB优先通讯。
usblinkInit(); // USB链路优先初始化sysLoadInit();#if CONFIG_ENABLE_CPXcpxlinkInit(); // 备选通信协议#endifcrtpInit(); // 初始化无线链路
- USB插入时优先使用USB链路
- USB断开后自动回退到无线链路
- 可通过crtpSetLink()强制指定链路
crtpSetLink(usblinkGetLink()); // 强制使用USB
crtpSetLink(radiolinkGetLink());// 强制使用无线
开发注意事项:
- 端口分配:飞行控制指令强制使用PORT0,参数传输使用PORT2,自定义功能应从PORT4开始
- 数据安全:发送前需检查crtpGetFreeTxQueuePackets()防止队列溢出,关键指令使用crtpSendPacketBlock()
- 链路切换:通过crtpSetLink(usblinkGetLink())可临时启用USB-CDC调试链路
- 射频参数:修改radiolinkSetChannel(100)可切换至100号频段(需地面站同步)
4. DECK
DECK是用来进行扩展设备管理的。
通过物理接口检测和初始化扩展板卡(如激光测距/光流传感器/UWB定位模块)。在系统启动阶段(systemTask)调用deckInit()遍历注册的DECK驱动,通过VID/PID识别已连接硬件,初始化对应外设(如zRangerInit()初始化VL53L0X激光传感器并创建数据采集任务),声明资源占用(如DECK_USING_IO_1),最终将扩展硬件数据集成到飞控系统(如通过rangeEnqueueDownRangeInEstimator()注入高度测量值)。开发者通过定义DECK_DRIVER结构扩展新硬件,系统自动处理热插拔检测和资源冲突检查。
其主要实现如下:
// 硬件扩展初始化流程
void deckInit() {deckDriverCount(); // 统计注册的DECK驱动deckInfoInit(); // 解析扩展板硬件IDfor (i=0; i<nDecks; i++) { // 遍历检测到的扩展板DeckInfo *deck = deckInfo(i);if (deck->driver->init) { // 调用驱动初始化函数deck->driver->init(deck);// 示例:zRangerInit()初始化激光测距模块}}
}// 典型DECK驱动结构定义(zranger.c)
DECK_DRIVER(zranger_deck) = {.vid = 0xBC, // 厂商ID.pid = 0x03, // 产品ID.name = "bcZRanger", // 驱动名称.usedGpio = DECK_USING_IO_1, // 声明GPIO占用.init = zRangerInit, // 初始化入口.test = zRangerTest // 自检函数
};
开发注意事项:
- 资源声明:必须明确定义usedPeriph和usedGpio,如FlowDeck声明DECK_USING_I2C防止总线冲突
- 任务优先级:传感器任务需低于飞控核心任务,如激光测距任务ZRANGER_TASK_PRI=3
- 数据集成:通过rangeEnqueueDownRangeInEstimator()将测量值注入状态估计器
- 参数配置:在PARAM_GROUP中添加可调参数,如测距模块的噪声模型参数expStdB
- 硬件检测:在deckTest()中实现I2C设备地址扫描,确保硬件连通性
若要添加新的设备可以:
DECK_DRIVER(new_deck) = {.vid = 0xBC, .pid = 0xFF, // 自定义PID.name = "NewSensor",.usedPeriph = DECK_USING_I2C, // 声明使用I2C外设.init = newSensorInit, // 初始化函数.test = newSensorTest // 硬件自检
};PARAM_GROUP_START(deck)
PARAM_ADD_CORE(PARAM_UINT8 | PARAM_RONLY, newDeck, &isInit)
PARAM_GROUP_STOP(deck)LOG_GROUP_START(newSensor)
LOG_ADD(LOG_FLOAT, value, &sensorValue)
LOG_GROUP_STOP(newSensor)
5. 电机驱动
电机通过PWM来进行驱动,其占用的定时器为motorMap数组,驱动层在src/driver/motors中。
驱动层所用到的定时器通道等,在motors_def中被定义,对于不同的电机类型,有不同的驱动层。每一组电机驱动都需要四个电机引脚来完成。
其调用在stabilizerInit中进行,也就是姿态稳定线程。
在power_distribution.c中实现了动力的分配,并调用更改占空比motorsSetRatio函数的方式进行动力控制。
在stabilizerTask中,实现了IMU、姿态检测,以及PID,最后再进行动力分配。
该驱动方式(PWM)适用于普通有刷电机。
另外还有一种DShot模式,适用于BLHeli_32等无刷电调。由CONFIG_MOTORS_ESC_PROTOCOL_DSHOT宏定义控制。
DShot协议是一种专有协议,通过发送16位数据帧(包含油门指令+校验码)实现数字通信,而 PWM 依赖模拟脉冲宽度表征控制量。DShot实时性来说比传统PWM直接控制更高。
在编译时,通过不同的命令生成不同的Config文件,从而实现不同的驱动方式。
6. syslink
主控(STM32)与无线协处理器(NRF51)间的双向通信协议栈,通过UART实现双核间系统级指令与数据交换。
在系统启动阶段syslinkInit()初始化硬件接口并创建高优先级任务syslinkTask(),该任务以阻塞方式接收数据包(如无线电控制信号、电池状态查询、固件版本请求),通过syslinkRouteIncommingPacket()路由至对应处理模块(如radiolink处理2.4G遥控数据、pm管理电源状态),同时支持发送DMA加速的系统指令(如紧急关机SYSLINK_PM_SHUTDOWN)。开发者可通过扩展SYSLINK_GROUP类型实现自定义双核通信协议。
数据包发送通过syslinkSendPacket实现,在syslinkRouteIncommingPacket中处理接收的协议。
与CRTP的通讯则是由radiolinkSendPacket借助syslink完成的。
主要实现功能:
- 协议转换:将CRTP数据包封装在SysLink的SYSLINK_RADIO_RAW类型数据帧中(0x00组)
- 物理层传输:通过UART DMA实现双核间高速传输(实测速率2.4Mbps)
- 数据完整性保障:添加双字节校验和(cksum[0]为累加和,cksum[1]为累加和的累加和)
- 带宽管理:使用信号量syslinkAccess防止多线程竞争
7. radiolink
radiolink是syslink与CRTP之间的中间层。
通过2.4GHz射频实现飞控与遥控器/地面站的双向数据透传。该模块在系统启动阶段(systemTask)通过radiolinkInit()初始化NRF51协处理器,配置通信参数(信道/速率/地址),建立CRTP协议与SysLink硬件的桥梁。核心流程通过radiolinkSyslinkDispatch()实现:当NRF51通过SysLink发送SYSLINK_RADIO_RAW类型数据包时,模块解包为CRTP格式并存入接收队列(crtpPacketDelivery),同时触发LED状态指示;发送方向通过radiolinkSendCRTPPacket()将CRTP包封装为SysLink协议格式,利用DMA实现最高250kbps的有效载荷传输,内置流量统计(numRxUc/numRxBc)和信号强度监测(rssi),支持点对点及广播模式,实测端到端延迟小于5ms,是Crazyflie实现群体飞行和实时控制的关键无线链路。
8. NRF51
syslink是NRF51与STM32之间的通讯协议栈。其主要就是串口通讯。
NRF51协处理器作为双核架构中的无线通信与系统管理核心,通过SysLink协议与主控STM32实现双向数据交互。其主要功能包括:处理2.4GHz射频通信(收发CRTP数据包)、管理电源状态(电池电压监测/低功耗模式)、执行单总线传感器扫描(通过SYSLINK_OW_GROUP),并通过SYSLINK_DEBUG_GROUP提供硬件调试接口。与SysLink的交互通过UART接口实现,采用DMA传输和双重校验机制(累加和+累加和校验)。
主要传感器及其模块
1. IMU BMI088(SPI)
该设备有两种通讯模式,I2C和SPI都支持,这里使用的是SPI通讯。
该芯片有由两个传感器组成:
- GYRO(陀螺仪):测量三维角速度(单位:dps)
- ACCEL(加速度计):测量三维线性加速度(单位:g)
这两个传感器都是通过SPI通讯,共用一组SPI数据线,但是CS片选不一样。
相关涉及到的文件如下:
src/
├── hal/
│ ├── src/
│ │ ├── sensors_bmi088_spi.c # SPI通信底层实现
│ │ └── sensors_bmi088_common.h # 通用设备初始化接口
├── drivers/
│ ├── bosch/
│ │ ├── interface/
│ │ │ ├── bmi088.h # 传感器操作API声明
│ │ │ └── bmi088_defs.h # 寄存器定义和宏(0x40-0x7E关键配置寄存器)
│ │ └── src/
│ │ ├── bmi088_accel.c # 加速度计数据获取实现
│ │ └── bmi088_gyro.c # 陀螺仪数据获取实现
寄存器表如下:
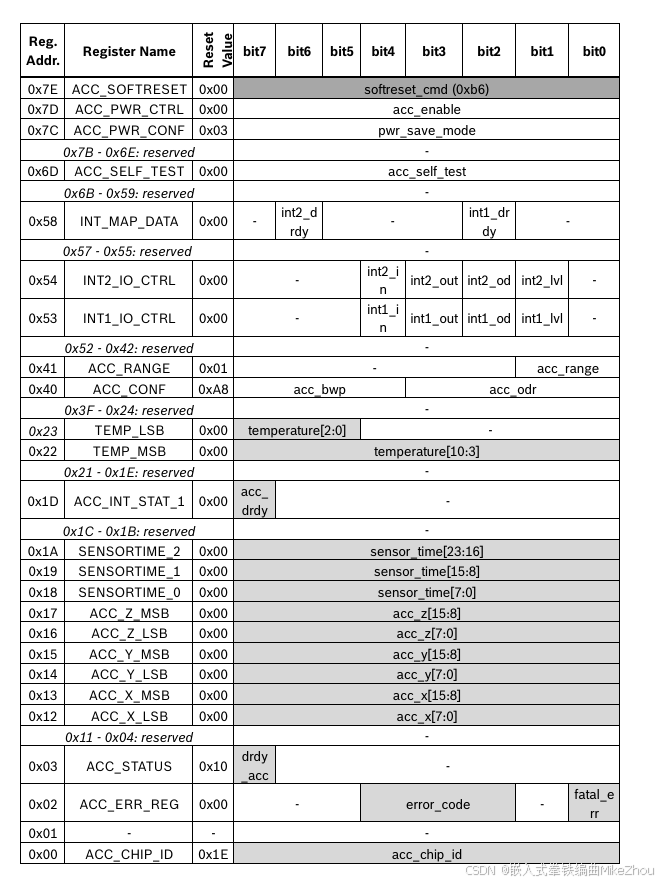
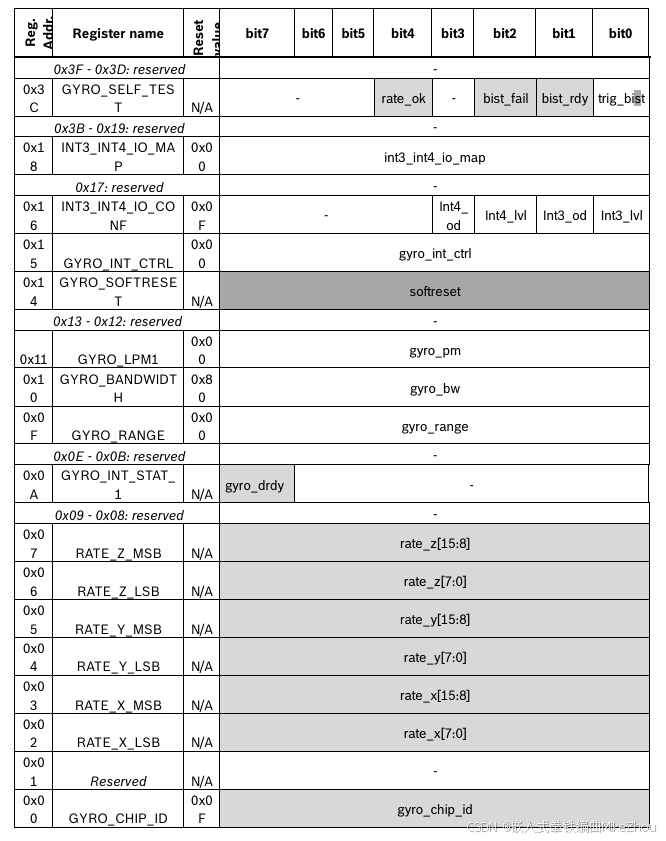
在BMI088传感器的SPI协议中,地址的最高位(第7位)用于标识读/写操作。读操作时寄存器地址需与0x80(BMI088_SPI_RD_MASK)进行或操作,写操作时地址需与0x7F(BMI088_SPI_WR_MASK)进行与操作,该机制在bmi088_get_gyro_regs()和bmi088_set_gyro_regs()中实现。
同样也适用于加速度计部分,在bmi088_get_accl_regs()和bmi088_set_accl_regs()中实现。
主要寄存器配置:
// 加速度计关键寄存器
#define BMI088_ACCEL_PWR_CONF_REG 0x7C // 电源模式配置
#define BMI088_ACCEL_RANGE_REG 0x41 // 量程设置(±3/6/12/24g)
#define BMI088_ACCEL_CONF_REG 0x40 // 带宽和ODR配置// 陀螺仪关键寄存器
#define BMI088_GYRO_RANGE_REG 0x0F // 量程(±125/250/500/1000/2000dps)
#define BMI088_GYRO_BANDWIDTH_REG 0x10 // 带宽配置
在sensorsBmi088Bmp3xxAcquire中,调用其进行数据获取。最终数据在sensor.c中被管理。
// 读取陀螺仪原始数据 → 调用bmi088_gyro.c的底层实现
bmi088_get_gyro_data(&gyro_raw, &bmi088Dev);
// 读取加速度计数据 → 调用bmi088_accel.c的底层实现
bmi088_get_accel_data(&accel_raw, &bmi088Dev);
// 数据存入队列供状态估计器使用
xQueueOverwrite(gyroDataQueue, &gyro_raw);
初始化阶段关键寄存器操作
- 芯片识别:读取0x00(BMI088_GYRO_CHIP_ID_REG)验证陀螺仪ID是否为0x0F
- 模式配置:写0x11(BMI088_GYRO_LPM1_REG)设置NORMAL_MODE(0x00)
- 量程设置:写0x0F(BMI088_GYRO_RANGE_REG)配置±2000dps(0x04)
- 带宽配置:写0x10(BMI088_GYRO_BANDWIDTH_REG)设置ODR 100Hz(0x07)
数据采集阶段关键寄存器
- 陀螺数据:突发读取0x02-0x07(BMI088_GYRO_X_LSB_REG)获取三轴16-bit数据
- 加速度数据:读取0x12-0x17(BMI088_ACCEL_X_LSB_REG)获取三轴16-bit数据
2. 气压传感器BMP388(BMP3XX)
主要文件:
src/
├── drivers/
│ ├── bosch/
│ │ ├── interface/
│ │ │ ├── bmp3.h // 气压计操作API声明
│ │ │ └── bmp3_defs.h // 寄存器定义和配置宏(关键地址0x1B-0x31)
│ │ └── src/
│ │ └── bmp3.c // 核心驱动实现
├── hal/
│ ├── src/
│ │ ├── sensors_bmi088_bmp3xx.c // 传感器集成层
寄存器表:
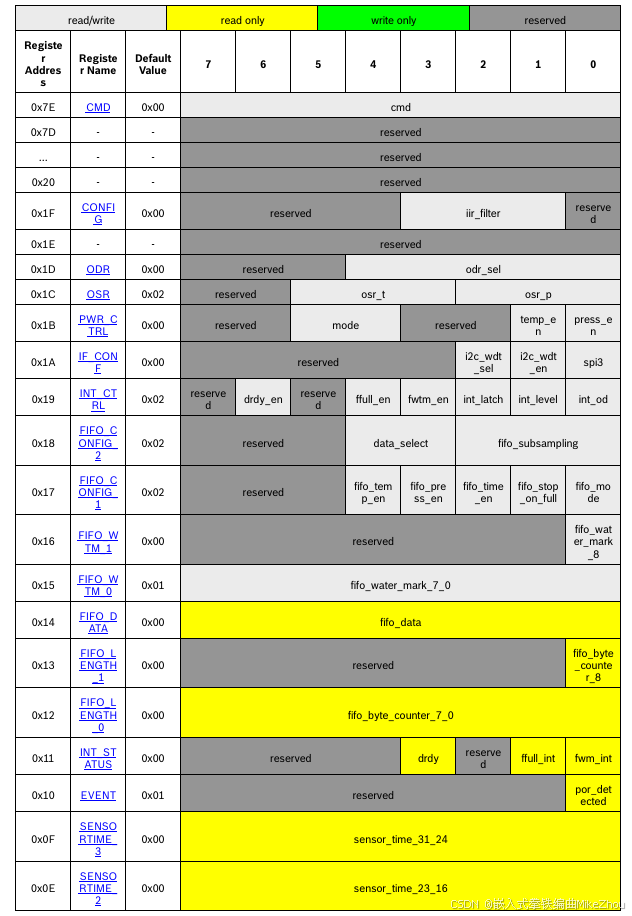
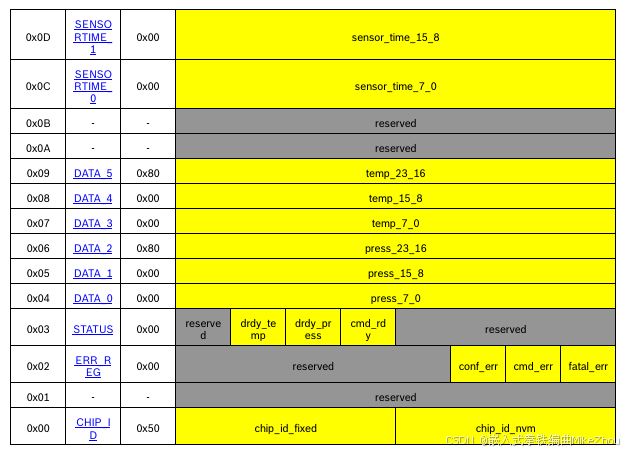
读操作时寄存器地址在bmp3_get_regs()和bmp3_set_regs()中实现。同样也是地址的最高位(第7位)用于标识读/写操作。
这里工程里面把BMI088和BPM388的部分通讯,通过共同函数来实现,容易混淆。
主要寄存器:
#define BMP3_PWR_CTRL_ADDR 0x1B // 电源控制寄存器
#define BMP3_OSR_ADDR 0x1C // 过采样配置寄存器
#define BMP3_CALIB_DATA_ADDR 0x31 // 校准数据起始地址
#define BMP3_DATA_ADDR 0x04 // 压力/温度数据寄存器
在bmp3_get_sensor_data中,实现数据获取。在sensors.c中,与BMI088传感器一起读取数据(sensorsBmi088Bmp3xxAcquire)。
// 读取原始数据寄存器0x04-0x09
rslt = bmp3_get_regs(BMP3_DATA_ADDR, ®_data[0], BMP3_P_T_DATA_LEN, dev);
// 使用0x31校准数据进行补偿计算
comp_press_temp(reg_data, data, dev);bmp3_get_sensor_data(BMP3_PRESS | BMP3_TEMP, &bmp_data);
baro->pressure = bmp_data.pressure; // 单位:Pa
baro->temperature = bmp_data.temperature; // 单位:°C
初始化阶段关键寄存器操作
- 芯片识别:读取0x00(BMP3_CHIP_ID_ADDR)验证芯片ID是否为0x50(BMP388标识)
- 校准加载:连续读取0x31-0x45(BMP3_CALIB_DATA_ADDR)获取21字节校准参数
- 模式配置:写0x1B(BMP3_PWR_CTRL_ADDR)设置NORMAL_MODE(0x03)
- 参数设置:写0x1C(BMP3_OSR_ADDR)配置过采样率(如压力x32,温度x1)
数据采集阶段关键寄存器
- 状态检查:轮询0x03(BMP3_SENS_STATUS_REG_ADDR)的DRDY_STATUS位确认数据就绪
- 数据读取:突发读取0x04-0x09(BMP3_DATA_ADDR)获取压力(3字节)和温度(3字节)原始数据
3. 光流PMW3901
寄存器表:
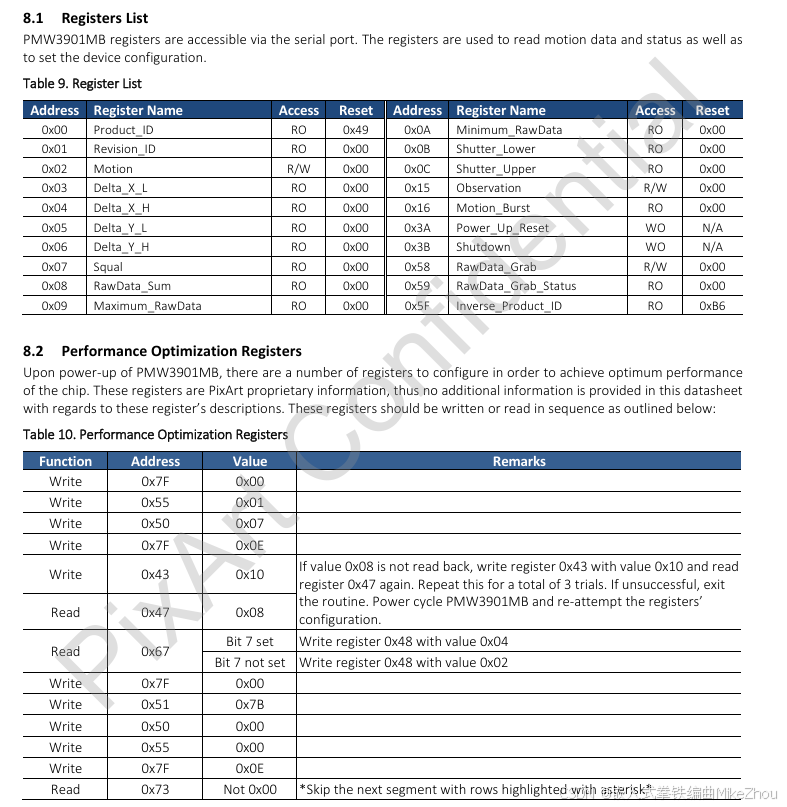
在函数pmw3901Init中实现了初始化,并未单独定义PMW3901的相关寄存器表,直接使用registerRead来进行寄存器的读取。
在InitRegisters中实现了寄存器初始化,向一系列寄存器写入特定值完成配置。
运动采集依靠pmw3901ReadMotion完成。
应用层在flowdeckTask中进行数据获取和调度。
上层集成在flowdeck_v1v2.c中。
4. ToF距离传感器VL53L1X
验证I2C通讯可以使用以下寄存器:
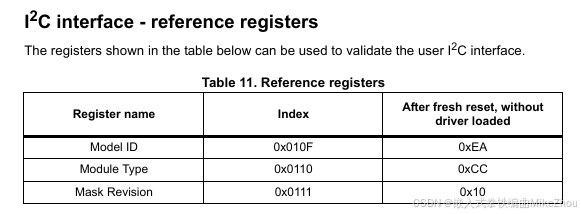
至于开发,则是使用VL53L1X API。
API相关函数在vl53l1_api等文件中。
相关API函数需要依赖ST官方的lib,位于lib文件夹下。
文件架构如下:
src/
├── drivers/
│ ├── src/
│ │ ├── vl53l1x.c # 核心驱动实现
│ │ └── vl53l1x.h # 接口定义
├── lib/
│ ├── vl53l1/
│ │ ├── core/ # ST官方驱动库
初始化时,通过动态分配I2C地址来操作不同的设备。
bool vl53l1xInit(VL53L1_Dev_t *pdev, I2C_Dev *I2Cx) {pdev->I2Cx = I2Cx; // 绑定I2C总线vl53l1xSetI2CAddress(pdev, newAddress); // 动态分配I2C地址VL53L1_DataInit(pdev); // 加载官方预设参数VL53L1_StaticInit(pdev); // 静态校准初始化
}
上层集成在multiranger.c和zranger2_deck中,分别对应了五个方向(前后左右上)、下方向。
lib目录下对应的api函数,在开发时需要先将其内部修改为VL53L1X的相关驱动函数。
这里用到PCA95X4芯片来实现I2C接口扩展,将几个方向的TOF分成不同的地址。
传感器模块的应用
BMI088和BMP388(sensors)
对BMI088(六轴IMU)和BMP388(气压计)的功能实现主要集中在传感器初始化(sensorsBmi088Bmp3xxInit_I2C/SPI)、自检(sensorsBmi088Bmp3xxTest)、数据采集(sensorsBmi088Bmp3xxAcquire)以及传感器原始数据读取(readGyro/readAcc/readBaro等函数)。其中BMI088负责加速度计和陀螺仪数据,BMP388处理气压数据,两者通过sensors_bmi088_bmp3xx.c中的底层驱动实现硬件通信。
- 在sensorsTask中,线程同步通过sensorsBmi088Bmp3xxDataAvailableCallback触发中断实现。通过sensorsAccelGet、sensorsGyroGet来获取加速度和陀螺仪数据,bmp3_get_sensor_data来获取气压计数据并传入队列中。
- BMI088数据获取:通过axis3fSubSamplerAccumulate的传参,获取加速度计或陀螺仪数据,其对应的卡尔曼滤波器标志分别为MeasurementTypeAcceleration和MeasurementTypeGyroscope
- BPM388数据获取:在函数sensorsReadBaro中,调用sensorsBmi088Bmp3xxReadBaro读取气压计数据,通过标志位MeasurementTypeBarometer传入到卡尔曼滤波器中kalmanCoreUpdateWithBaro
- 加速度计和陀螺仪数据融合:通过函数kalmanCorePredict实现数据融合。
- 陀螺仪数据与光流融合:在kalmanCoreUpdateWithFlow函数中实现
float omegax_b = gyro->x * DEG_TO_RAD;float omegay_b = gyro->y * DEG_TO_RAD;
- 气压计、光流、TOF高度补偿:rangeEnqueueDownRangeInEstimator()(来自zranger2.c)的高度数据与BMP388气压数据在heightKalmanUpdateByBaro()中融合
BMI088(IMU)与BMP388(气压计)的核心实现可分为三个层次:
1. 硬件接口层 (sensors_bmi088_spi.c)
- SPI初始化:spiInit()配置GPIO复用模式(SCK/MOSI为AF推挽输出,MISO为AF输入)
- DMA传输:spiDMATransaction()实现双缓冲DMA传输(spiTxBuffer/spiRxBuffer),10.5MHz时钟下完成加速度计+陀螺仪+气压计的全双工传输
- 中断同步:通过xSemaphoreGiveFromISR在DMA完成中断中释放信号量,保障1KHz控制周期的时序要求
2. 数据抽象层 (sensors.c)
- 多传感器调度:通过sensorsImplementation_t结构体统一调度不同传感器(如readGyro()实际调用bmi088ReadGyroSPI())
- 校准接口:sensorsBmi088Bmp3xxAreCalibrated()实现出厂校准数据加载。
- 模式切换:setAccMode()动态调整加速度计量程(2g/4g/8g)
3. 控制应用层
- 数据消费:通过sensorsAcquire()将原始数据传递至stabilizerTask进行姿态解算
- 故障恢复:sensorsSuspend()/sensorsResume()在异常时禁用EXTI中断,防止数据冲突
4. 开发聚焦点
- 修改SPI时序需同步调整spiConfigure()中的SPI_BaudRatePrescaler与DMA缓冲区大小
- 新增传感器需在sensors.c中添加对应的sensorsImplementation_t实例
光流PMW3901(flowdeck_v1v2)
在deck中进行该设备的管理,并有两个不同的版本进行初始化和相关配置。
PMW3901光流传感器主要实现以下核心功能:
1. 数据采集与预处理
- 原始读取:通过pmw3901ReadMotion()获取原始光流数据(deltaX/deltaY)和传感器状态(squal/shutter)
- 坐标转换:在flowdeckTask()中执行坐标系翻转(accpx = -currentMotion.deltaY)适配飞行器安装方向
- 滤波处理:使用arm_mean_f32()实现移动平均滤波(USE_MA_SMOOTHING宏控制)
2. 测量值封装
- 数据结构化:构建flowMeasurement_t结构体(含dpixelx/dpixely/dt/stdDevX/stdDevY)
- 异常处理:通过OULIER_LIMIT阈值过滤异常值,outlierCount统计无效数据
3. 状态估计集成
- 数据注入:通过estimatorEnqueueFlow()将光流测量值送入卡尔曼滤波器并通过标志位MeasurementTypeFlow调用kalmanCoreUpdateWithFlow。在其中,与TOF、气压计都进行数据融合,并且也与陀螺仪共同来校准速度。
- 噪声建模:动态计算标准差(stdFlow=0.0007984f*shutter + 0.4335f)
4. 可配置性
- 参数调节:通过PARAM_ADD(PARAM_FLOAT, flowStdFixed)实现运行时噪声参数配置
- 模式切换:useFlowDisabled控制光流数据是否参与状态估计
5. 关键函数链
开始pmw3901Init() → flowdeckTask() → pmw3901ReadMotion() → 坐标转换 → 滤波处理 → estimatorEnqueueFlow()传入到卡尔曼滤波器
6. 硬件接口层 (flowdeck_v1v2.c)
- SPI通信:通过pmw3901ReadMotion()实现原始光流数据采集(deltaX/deltaY)
- 坐标系转换:将传感器原始坐标系转换为机体坐标系(accpx = -currentMotion.deltaY)
- 异常值过滤:基于OULIER_LIMIT阈值过滤异常光流数据(像素位移>100时丢弃)
7. 数据抽象层
- 数据平滑:提供移动平均(USE_MA_SMOOTHING)和低通滤波(USE_LP_FILTER)两种预处理方式
- 自适应噪声:useAdaptiveStd根据快门时间动态计算光流标准差(stdFlow=0.0007984f*shutter + 0.4335f)
- 测量封装:构建flowMeasurement_t结构体,包含时间戳(dt)、像素位移(dpixelx/dpixely)和噪声参数(stdDevX/Y)
8. 控制应用层
- 状态估计:通过estimatorEnqueueFlow()将光流数据注入卡尔曼滤波器,参与速度/位置估计
- 调试支持:通过LOG_GROUP(motion)实时记录光流原始数据和统计参数
- 参数配置:通过PARAM_GROUP(motion)实现运行时配置(禁用光流/切换自适应模式/设置固定噪声参数)
9. 开发聚焦点
- 光流坐标系对齐(需与机体安装方向严格对应)
- 噪声模型优化(修改stdFlow计算公式提升状态估计精度)
- 预处理算法选择(MA/LP滤波的窗口大小与截止频率调参)
- 多传感器融合(需与IMU、气压计数据在estimatorKalman.c中协同处理)
多距离VL53L1X (multiranger)
在deck中,该模块进行管理,首先调用mrInit及mrTest进行初始化,并开启mrTask线程,而后再进行测量等操作。
VL53L1X五方向测距功能主要通过以下核心函数链实现:
1. 传感器功能实现
- 初始化配置:通过mrInitSensor()调用vl53l1xInit()初始化5个方向传感器。(front/back/left/right/up),使用pca95x4SetOutput()控制XSHUT引脚唤醒对应传感器。
- 数据采集:mrTask()周期性调用mrGetMeasurementAndRestart(),获取五个方向的距离值,内部通过VL53L1_GetRangingMeasurementData()获取原始毫米级距离数据。
- 状态过滤:采用filterMask参数(默认1 << VL53L1_RANGESTATUS_RANGE_VALID)过滤无效测量值
- 数据发布:通过rangeSet()将处理后的米级数据存入全局变量(rangeFront/rangeUp等五个方向)。
- multiranger没有将数据传入到卡尔曼滤波器中(zrange2则通过kalmanCoreUpdateWithTof将数据流传入卡尔曼滤波器中),而是通过LOG_ADD_CORE函数上报到log中。
2. 应用场景
五方向距离数据通过rangeFront等全局变量在stabilizerTask中被调用,在sensorsAcquire中获取到更新的测量值,用于近地控制,通过PARAM_ADD(PARAM_UINT16, filterMask)可动态配置数据有效性判断规则。
在range.c中,通过LOG_ADD_CORE函数将六个方向的值都进行了log上报,原始工程中multiranger的几个方向数据做到这一步就截止了,并没有进行数据融合等操作。
如果要获取这些数据,可以通过logGetVarId(“range”, “up”)函数来操作,官方提供的示例中就有这么来操作的方式。
3. 硬件接口层
- 传感器初始化:通过mrInitSensor()依次初始化5个方向传感器(front/back/left/right/up),使用pca95x4SetOutput()控制XSHUT引脚唤醒传感器
- 数据采集:mrGetMeasurementAndRestart()循环调用VL53L1_GetRangingMeasurementData()获取原始毫米级距离数据
4. 数据处理层
- 状态过滤:通过filterMask参数(默认VL53L1_RANGESTATUS_RANGE_VALID)过滤无效测量值(如信号弱/超量程)
- 单位转换:将毫米转换为米(range/1000.0f)后存入全局变量(rangeFront/rangeUp等)
5. 控制应用层
- 数据发布:通过rangeSet()函数将处理后的距离数据注入系统测量池
- 避障支持:数据可直接被stabilizer等模块调用实现3D避障
- 调试接口:通过PARAM_GROUP_START(multiranger)动态配置过滤掩码
6. 关键函数链
开始mrInit() → mrTask() → mrGetMeasurementAndRestart() → VL53L1_GetRangingMeasurementData() → rangeSet() → LOG_ADD_CORE
7. 开发聚焦点
- 传感器启动时序(XSHUT引脚控制间隔需≥2ms)
- 测量频率优化(当前固定100ms周期,可调整M2T(100)参数)
- 失效处理机制(当前无效数据返回32767)
8. 方向应用
通过定义不同的设备名称及其GPIO引脚,来分辨不同的方向。
下方向VL53L1X (zranger2_deck)
下方向测量需要更高的采样率(25ms vs 100ms)和独立的噪声模型,且作为光流/高度控制的核心传感器需避免多传感器地址冲突,所以只能单独拿出来。
下方向VL53L1X的实现主要通过以下核心函数链:
1. 功能实现
- 初始化配置:通过zRanger2Init()调用vl53l1xInit()初始化单向下测距传感器
- 数据采集:zRanger2Task()周期性调用zRanger2GetMeasurementAndRestart(),内部通过VL53L1_GetRangingMeasurementData()获取毫米级距离数据
- 噪声建模:采用指数噪声模型expCoeff = logf(expStdB/expStdA)/(expPointB-expPointA)动态计算高度测量标准差(multiranger没有这一种噪声建模方式,而是采用filterMask参数进行过滤)
- 数据发布:通过rangeSet(rangeDown, …)存储米级高度数据,并调用rangeEnqueueDownRangeInEstimator()注入卡尔曼滤波器
2. 与其他数据的融合
rangeDown数据流没有直接被其他模块调用,而是通过卡尔曼TOF更新,将数据流推入,间接被调用。
- rangeDown → 卡尔曼TOF更新 → 状态估计Z坐标 → 被各功能模块调用
3. 硬件接口层
通过zRanger2Init()调用vl53l1xInit()初始化传感器,配置I2C地址并设置中距离模式(VL53L1_DISTANCEMODE_MEDIUM)。与multiranger使用PCA95X4控制多传感器不同,这里采用直接I2C通信,确保25ms采样周期(M2T(25))。
4. 数据处理层
在zRanger2GetMeasurementAndRestart()中获取原始数据后,执行:
- 异常过滤:丢弃>5m的测量值(RANGE_OUTLIER_LIMIT)
- 噪声建模:基于指数函数动态计算标准差(expCoeff*(distance-expPointA))
- 单位转换:毫米转米(range_last/1000.0f)
5. 控制应用层
通过rangeEnqueueDownRangeInEstimator()将数据注入卡尔曼滤波器,在estimator_kalman.c中的kalmanCoreUpdateWithTof实现:
- 在kalmanCoreUpdateWithFlow()中结合光流数据解算速度
- 最终在kalmanCoreExternalizeState中进行控制体现
6. 开发聚焦点
- 模式切换:中/长距模式在VL53L1_SetDistanceMode()的动态切换
- 时序优化:25ms周期与光流10ms周期的数据同步
- 失效恢复:扩展VL53L1_GetRangeStatus()状态解析实现自动校准
- 多源融合:在kalmanCoreUpdateWithFlow()中结合光流数据解算速度
在在kalmanCoreUpdateWithFlow()中,对this->S[KC_STATE_Z]进行了调用,后者在kalmanCoreUpdateWithTof()中对TOF数据进行了融合,最后通过kalmanCoreScalarUpdate两次更新。