20250607在荣品的PRO-RK3566开发板的Android13的uboot中使用gpio命令来配置GPIO的状态
20250607在荣品的PRO-RK3566开发板的Android13的uboot中使用gpio命令来配置GPIO的状态
2025/6/7 16:09
【结论:GPIO 0A6可以操作,但是应该不太完美!GPIO3A1被占用了?】
根据经验/很容易得知/艰难知道:
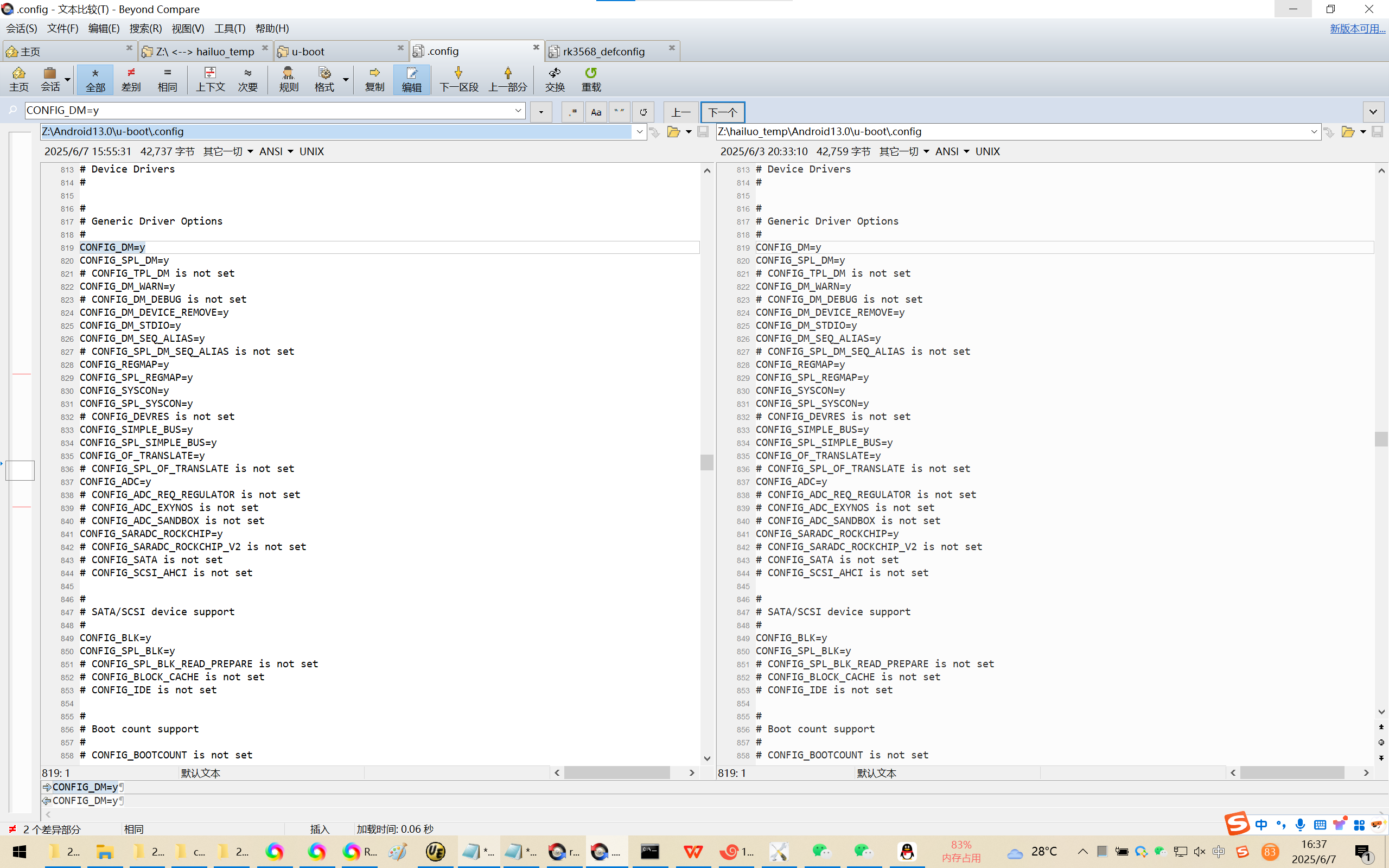
Z:\Android13.0\u-boot\.config
【有】
CONFIG_DM=y
CONFIG_DM_GPIO=y
【无】
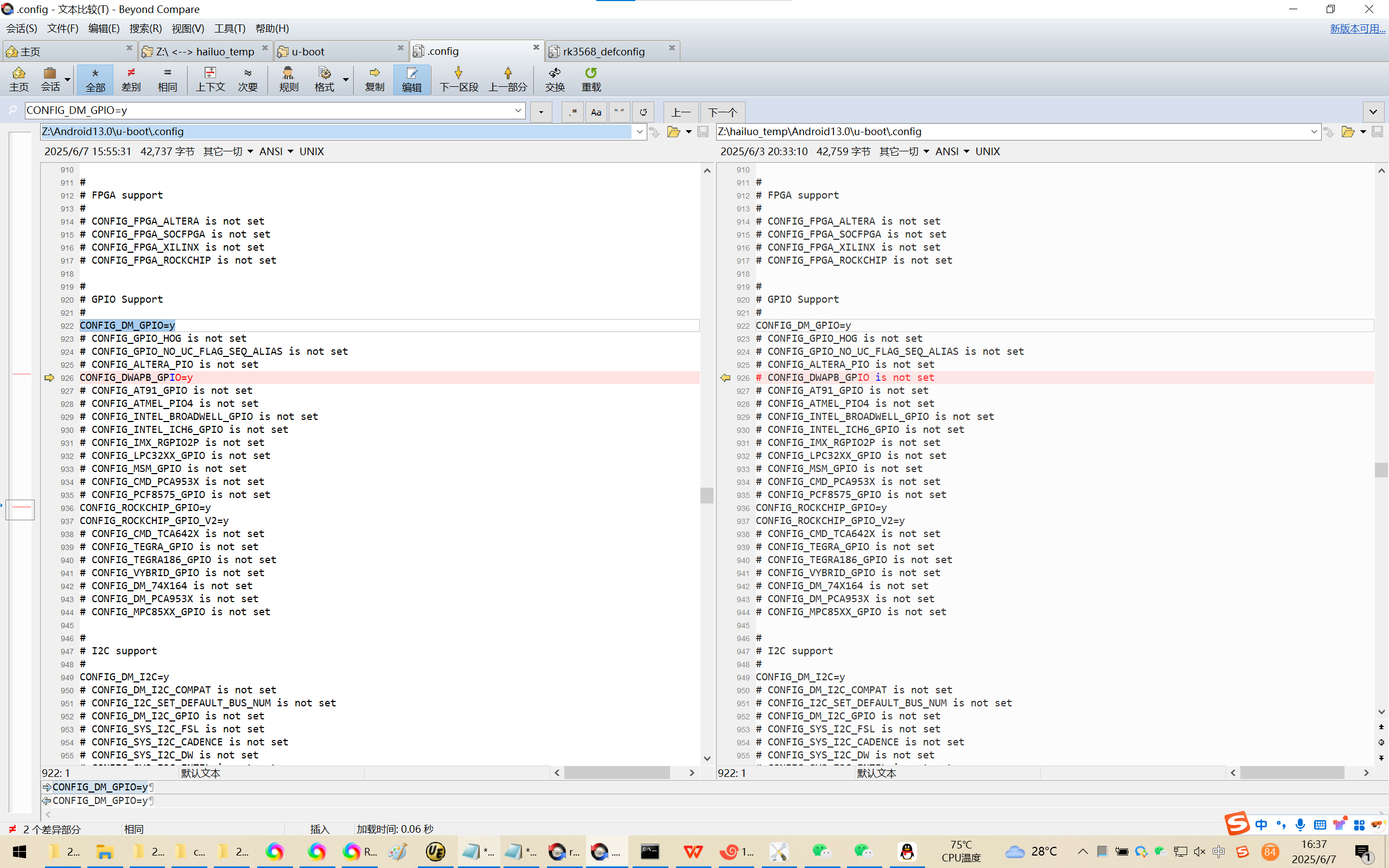
CONFIG_DWAPB_GPIO=y
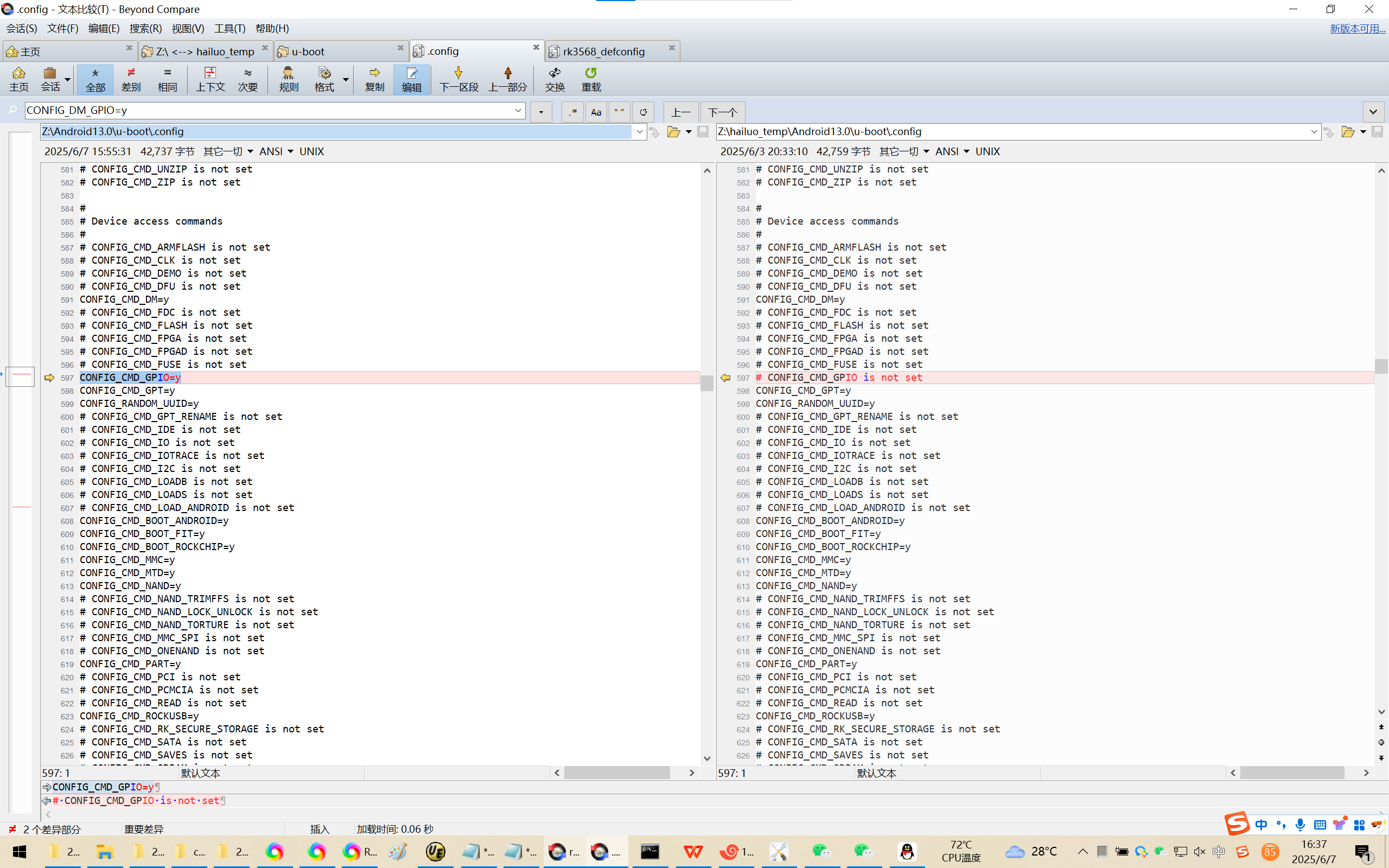
CONFIG_CMD_GPIO=y
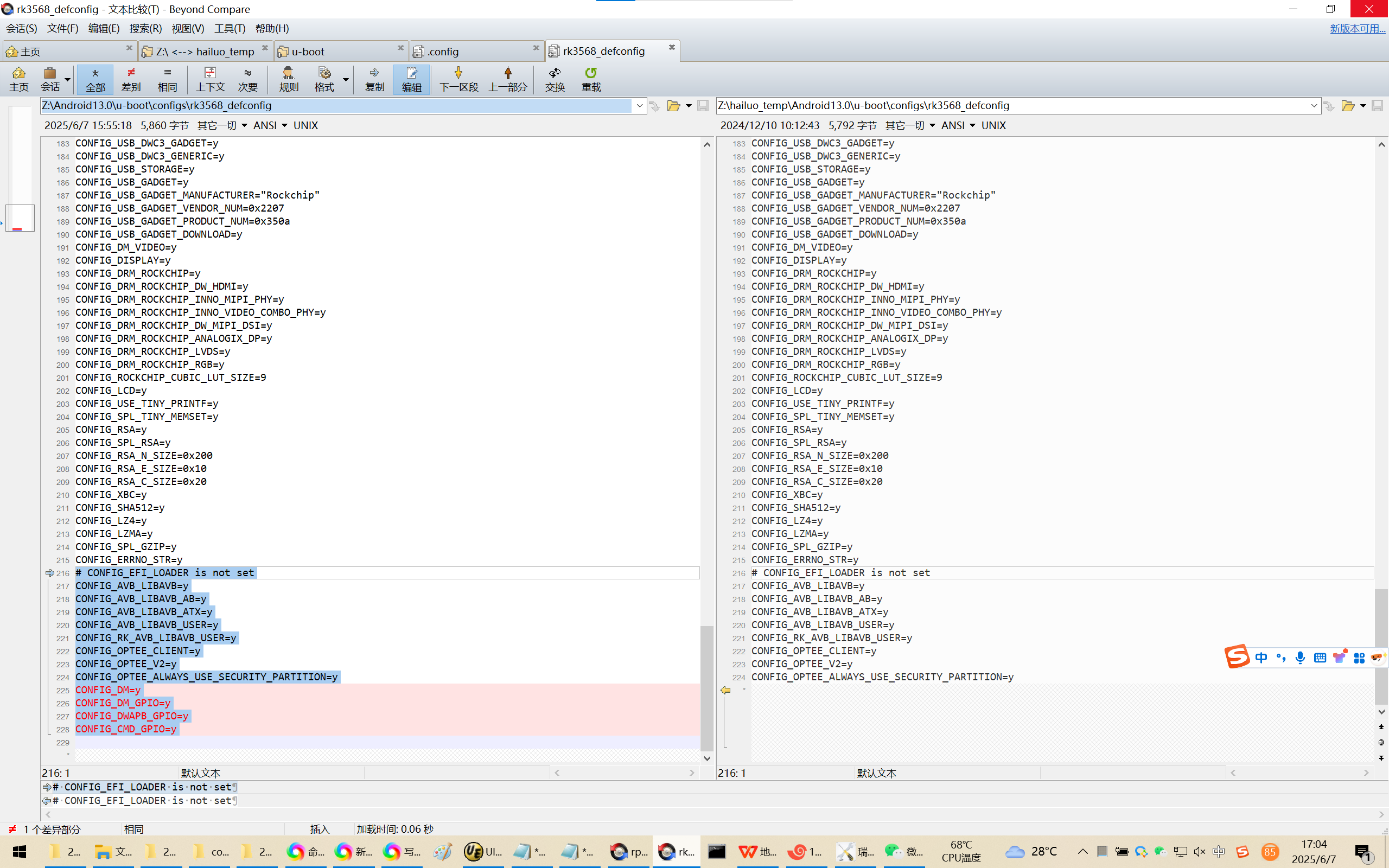
Z:\Android13.0\u-boot\configs\rk3568_defconfig
# CONFIG_EFI_LOADER is not set
CONFIG_AVB_LIBAVB=y
CONFIG_AVB_LIBAVB_AB=y
CONFIG_AVB_LIBAVB_ATX=y
CONFIG_AVB_LIBAVB_USER=y
CONFIG_RK_AVB_LIBAVB_USER=y
CONFIG_OPTEE_CLIENT=y
CONFIG_OPTEE_V2=y
CONFIG_OPTEE_ALWAYS_USE_SECURITY_PARTITION=y
【简单起见:直接全部加在最后面了^_】
CONFIG_DM=y
CONFIG_DM_GPIO=y
CONFIG_DWAPB_GPIO=y
CONFIG_CMD_GPIO=y
参考资料:
https://www.cnblogs.com/xu-long/p/16805994.html
怎么在uboot下使用通用GPIO接口
一:在uboot下的defconfig 打开如下配置
CONFIG_DM=y
CONFIG_DM_GPIO=y
CONFIG_DWAPB_GPIO=y
CONFIG_CMD_GPIO=y
二:重新编译u-boot后会生成cmd:gpio
(板子上电时连续按回车键)进入到板端uboot cmdline下执行" gpio status -a " 查看板端对应的gpio numbe
三:利用 uboot gpio 命令操作GPIO 做测试
gpio c 0 ; 将第0根PIN清零(拉低)
gpio s 0 ; 将第0根PIN设为output同时拉高
四:gpio 操作demo
直接以下demo code添加到uboot/cmd路径下,再在uboot/cmd/Makefile中添加编译选项,编译完成后可以直接操作gpio
复制代码
#include <command.h>
#include <linux/string.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <asm/gpio.h>
int do_gpio_test(struct cmd_tbl *cmdtp, int flag, int argc, char * const argv[])
{
if (argc < 2) {
printf("usage: gpio_test [requ/out/on/off]\n");
return 0;
}
if (strcmp("requ", argv[1]) == 0) {
gpio_request(126, "ir_a");
gpio_request(127, "ir_b");
mdelay(10);
} else if (strcmp("out", argv[1]) == 0) {
gpio_direction_output(126, 1);
gpio_direction_output(127, 1);
mdelay(10);
} else if (strcmp("on", argv[1]) == 0) {
gpio_set_value(126, 0);
gpio_set_value(127, 1);
mdelay(100);
gpio_set_value(126, 1);
gpio_set_value(127, 1);
} else if (strcmp("off", argv[1]) == 0) {
gpio_set_value(126, 1);
gpio_set_value(127, 0);
mdelay(100);
gpio_set_value(126, 1);
gpio_set_value(127, 1);
}
return 0;
}
U_BOOT_CMD(
gpio_test, 4, 1, do_gpio_test,
"u-boot gpio cmd test",
"gpio - just for test\n"
);
复制代码
编译完成升级后,进入到uboot会有gpio_test命令
gpio_test requ
初始化gpio
gpio_test out
设置gpio direction
gpio_test on
设置 ir_cur (的两根PIN) 状态
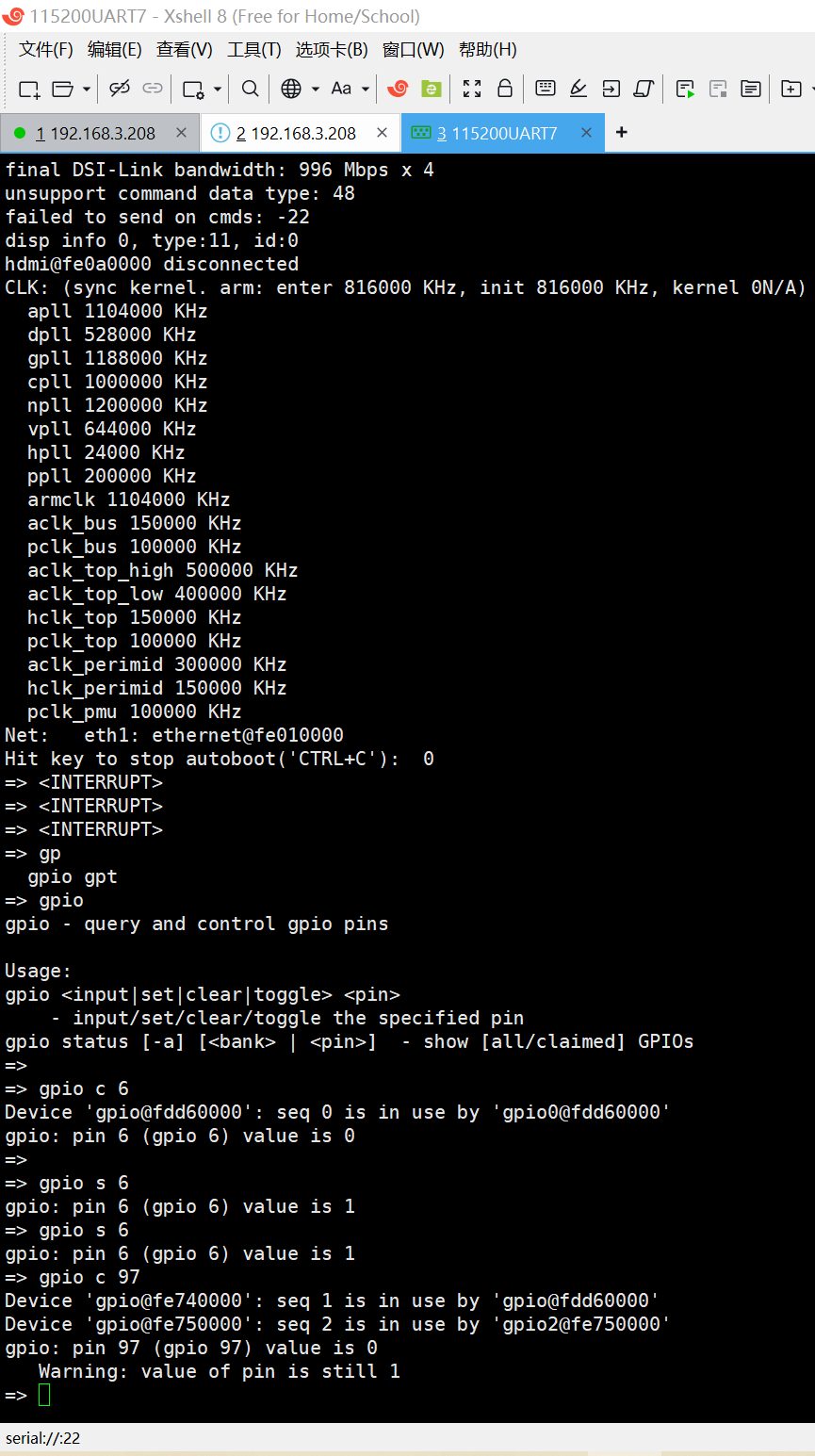
【完整的LOG:】
final DSI-Link bandwidth: 996 Mbps x 4
unsupport command data type: 48
failed to send on cmds: -22
disp info 0, type:11, id:0
hdmi@fe0a0000 disconnected
CLK: (sync kernel. arm: enter 816000 KHz, init 816000 KHz, kernel 0N/A)
apll 1104000 KHz
dpll 528000 KHz
gpll 1188000 KHz
cpll 1000000 KHz
npll 1200000 KHz
vpll 644000 KHz
hpll 24000 KHz
ppll 200000 KHz
armclk 1104000 KHz
aclk_bus 150000 KHz
pclk_bus 100000 KHz
aclk_top_high 500000 KHz
aclk_top_low 400000 KHz
hclk_top 150000 KHz
pclk_top 100000 KHz
aclk_perimid 300000 KHz
hclk_perimid 150000 KHz
pclk_pmu 100000 KHz
Net: eth1: ethernet@fe010000
Hit key to stop autoboot('CTRL+C'): 0
=> <INTERRUPT>
=> <INTERRUPT>
=> <INTERRUPT>
=> gp
gpio gpt
=> gpio
gpio - query and control gpio pins
Usage:
gpio <input|set|clear|toggle> <pin>
- input/set/clear/toggle the specified pin
gpio status [-a] [<bank> | <pin>] - show [all/claimed] GPIOs
=>
=> gpio c 6
Device 'gpio@fdd60000': seq 0 is in use by 'gpio0@fdd60000'
gpio: pin 6 (gpio 6) value is 0
=>
=> gpio s 6
gpio: pin 6 (gpio 6) value is 1
=> gpio s 6
gpio: pin 6 (gpio 6) value is 1
=> gpio c 97
Device 'gpio@fe740000': seq 1 is in use by 'gpio@fdd60000'
Device 'gpio@fe750000': seq 2 is in use by 'gpio2@fe750000'
gpio: pin 97 (gpio 97) value is 0
Warning: value of pin is still 1
=>
这片荣品的PRO-RK3566核心板的底板,USB3.0接口的电源是由GPIO 0A6所控制的。

拉低GPIO 0A6:gpio c 6

拉高GPIO 0A6:gpio s 6
拉高的时候,可以看见USB3.0接口上的鼠标的红灯闪烁一下就没有了。
电压有了,但是USB通讯协议在uboot模式下应该还没有加载完成。
USB通讯失败,USB鼠标就闪烁了一下而已就熄灭了。^_
