自适应流量调度用于遥操作:面向时间敏感网络的通信与控制协同优化框架
-
英文标题:Adaptive Flow Scheduling for Teleoperation: A Communication and Control Co-Optimization Framework over Time-Sensitive Networks
-
中文标题:自适应流量调度用于遥操作:面向时间敏感网络的通信与控制协同优化框架
作者信息
-
Zhenrui Cao(天津大学计算机科学与技术学院,智能与计算学院)
-
Tie Qiu(东北大学计算机科学与工程学院,天津大学智能与计算学院)
-
Xiaobo Zhou(天津大学计算机科学与技术学院,智能与计算学院)
-
Hao Su(天津大学计算机科学与技术学院)
-
Min Huang(东北大学信息科学与工程学院)
-
Dapeng Lan(中国科学院沈阳自动化研究所)
-
Xingwei Wang(东北大学计算机科学与工程学院)
摘要
本文提出了一种名为AFS-RT的自适应时间敏感网络(TSN)流量调度方法,用于机器人遥操作这一典型的工业控制应用。该方法在通信与控制协同优化框架下,通过综合分析遥操作案例,将基于时隙分配的流量调度与远程控制相结合,形成一个由控制驱动的协同优化模型。为应对通信与控制之间隐式映射带来的复杂性,本文增强深度强化学习(DRL)代理,使其具备基于时隙相关性的特征提取能力,从而提升代理的决策能力。实验结果表明,AFS-RT在多种网络条件下显著提升了遥操作性能,优于现有算法。
引言
时间敏感网络(TSN)因其确定性特性,已成为工业物联网(IIoT)中实时工业控制的关键技术。TSN通过精确的流量管理确保控制命令的确定性传输,为下一代信息物理系统(CPS)的发展奠定了基础。然而,现有研究将工业控制的性能要求抽象为流量调度的刚性约束,忽略了控制优化,导致理论上的传输优化无法有效提升实际工业控制性能。本文提出了一种新的通信与控制协同优化框架,通过将流量调度与控制性能直接关联,优化TSN流量调度方案,以提升工业控制性能。
相关工作
现有研究致力于通过改进流量调度模型来提升TSN网络的传输质量,以支持工业控制应用。这些方法包括基于精确算法、启发式规则和智能优化技术的调度方法。尽管这些方法在理论上提升了调度性能,但它们将工业控制应用的性能要求抽象为延迟或抖动的刚性约束,缺乏实际工业应用数据集的支持,导致这些约束过于理想化,难以确保实际工业控制性能的提升。本文通过引入通信与控制的协同优化框架,将传输优化与控制性能直接关联,以提升TSN网络在工业控制中的应用效果。
系统模型与问题描述
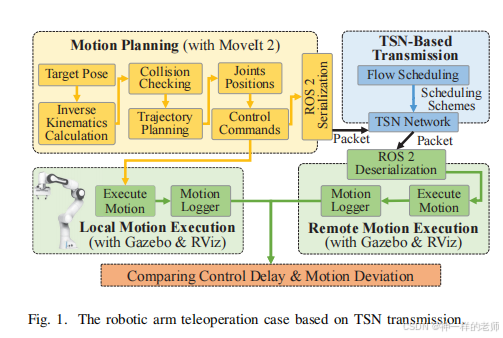
本文以机器人遥操作为例,分析了TSN网络在工业控制中的应用。机器人遥操作需要确定性的流量来实时传输控制命令,因此是研究TSN控制的理想案例。本文将TSN流量调度与远程控制相结合,形成一个由实时性能和控制精度驱动的协同优化问题。通过定义控制延迟和运动偏差等指标,量化远程控制性能,并将其作为优化目标,以指导流量调度方案的优化。
自适应流量调度方法
本文将协同优化问题转化为马尔可夫决策过程(MDP),并设计了一个基于深度强化学习(DRL)的调度代理。该代理通过时隙相关性引导的特征提取方法,利用图神经网络(GNN)处理时隙之间的内在相关性,增强特征表示,从而提升代理在复杂解空间中的决策能力。通过这种方法,代理能够有效地优化流量调度方案,以提升机器人遥操作的实时性能和控制精度。
实验评估
本文构建了一个基于真实TSN网络的遥操作测试平台,并开发了一个用于大规模评估的仿真环境。实验结果表明,AFS-RT在多种网络条件下显著优于现有方法,能够显著提升机器人遥操作的实时性能和控制精度。具体而言,AFS-RT在控制延迟和运动偏差方面均表现出色,且在不同网络拓扑结构和流量配置下均能保持稳定的性能。
结论
本文提出了一种面向机器人遥操作的自适应TSN流量调度方法AFS-RT,通过通信与控制的协同优化框架,显著提升了遥操作的实时性能和控制精度。实验结果验证了该方法的有效性。未来,我们将继续关注工业场景下的网络中心应用优化,进一步探索通信、计算与控制的协同设计。