动中通天线跟踪性能指标的测试
卫星通信动中通天线包括天线、卫星信号跟踪接收机、GNSS接收机(含天线)、组合导航设备、天线控制器、伺服结构以及其他射频组件等。其中:
-
• GNSS接收机提供系统位置信息;
-
• 组合导航设备提供天线所在平台的方位、俯仰、横滚姿态等信息;
-
• 天线控制器根据组合导航设备提供的姿态数据,以及跟踪接收机反馈的信标幅度,完成控制解算,向伺服机构输出需要调整的角度值。
-
• 伺服机构控制电机调整对应的角度,保证天线的波束中心对准卫星。
我们在机载相控阵天线控制器设计中介绍过天线控制器的组成和工作原理。
动中通天线的跟踪性能通过哪些指标来评价?具体每个指标是怎么测试的?
动中通天线跟踪性能的指标
动中通天线跟踪性能的指标主要有以下几个:
-
• 天线跟踪精度
-
• 天线失锁率
-
• 天线对星时间
-
• 天线失锁重新捕获时间
测试需要用到的仪器设备
测试所需要的仪器设备如下所示:
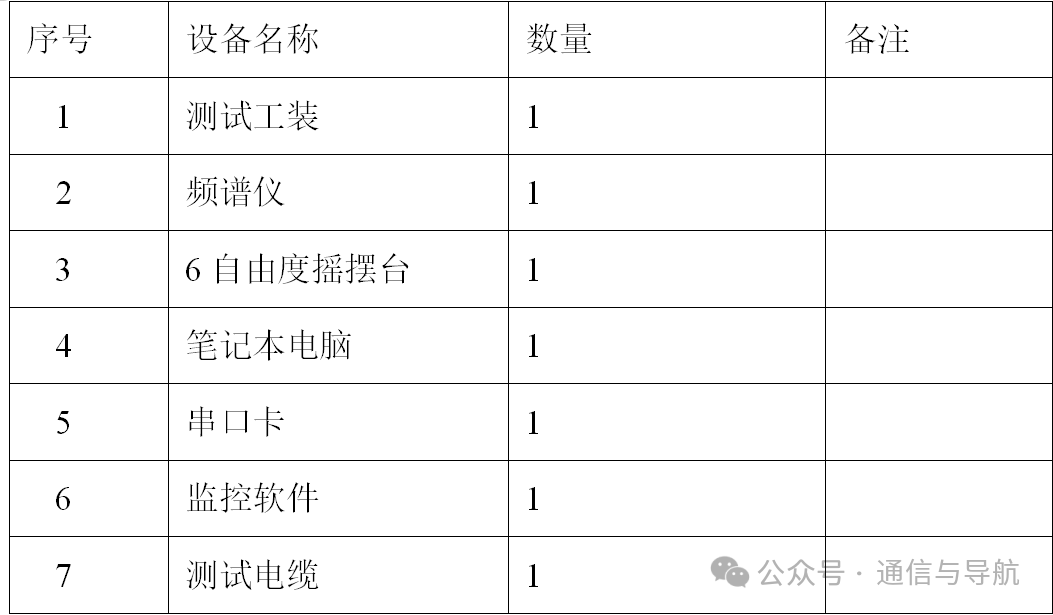
测试需要的仪器设备
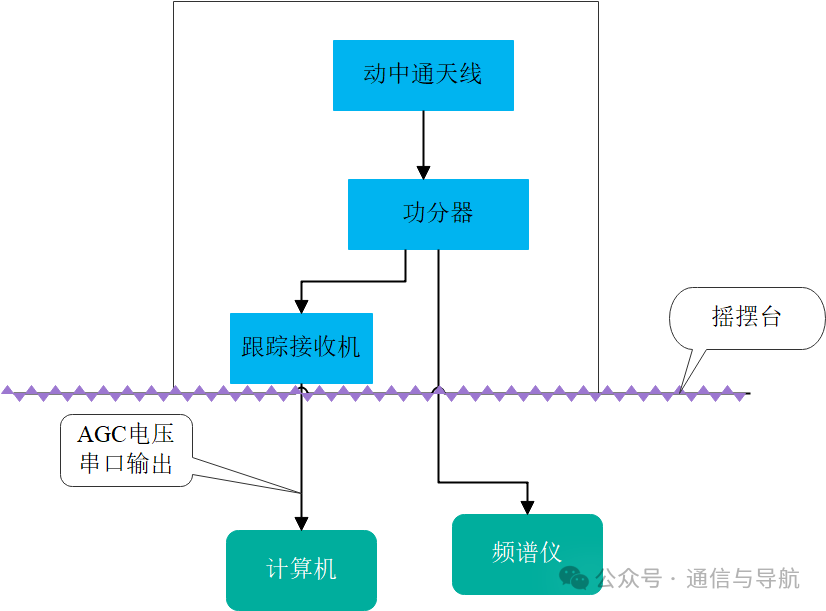
为了模拟动中通天线在运动条件下的性能指标,将动中通天线安装在6自由度摇摆台上。该摇摆台可以设置三方向的周期,幅度,角速度、初始位置等。
根据动中通天线实际载体的运动参数(比如从飞机厂家拿到飞机飞行中的速度、角速度,最大角度变化的参数),设置摇摆台的运动参数,从而达到在地面环境下就能够模拟载体实际运动的目的。
试验的连接关系如下:
摇摆台测试
以下测试都是室外对星测试,针对的是地球同步轨道卫星。
天线跟踪精度测试
静态跟踪精度测试
-
1. 将天线安装在摇摆台上,摇摆台水平静止不动。天线控制器连接计算机,计算机上运行监控软件;
-
2. 给天线加电,天线自动对准卫星。通过监控软件实时观测并记录AGC电压数值,记录5min数据,数据分别是V1,V2.....Vn;
-
3. 计算得到AGC电压的平均值V0和均方根S0,并转换为信号功率分别即为P0(单位;dBm)和R0(单位;dBm);
-
4. 均方根R0(单位:dBm)为静态条件下天线跟踪精度值。
(备注:AGC电压(单位:V)和信号功率(单位:dBm)是线性关系,线性关系的斜率由跟踪接收机厂家给出)。
动态跟踪精度测试
-
1. 将天线安装在摇摆台上,摇摆台设置好运动参数。天线控制器连接计算机,计算机上运行监控软件;
-
2. 启动摇摆台。
-
3. 给天线加电,天线自动对准卫星。通过监控软件实时观测并记录AGC电压数值,记录5min数据,数据分别是V1,V2.....Vn;
- 4. 按照下面的公式,计算得到AGC电压的均方根值Sd。
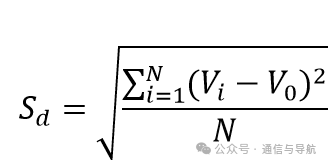
动态跟踪精度均方根
其中V0是静态跟踪精度测试环节的AGC平均值。
-
5. 将AGC电压的均方根Sd转换为信号功率(单位;dBm)Rd;
-
6. 均方根差Rd(单位:dBm)为动态条件下天线跟踪精度值。
天线失锁率测试
-
1. 将天线安装在摇摆台上,摇摆台设置好运动参数。天线连接计算机,计算机上运行监控软件;
-
2. 启动摇摆台。
-
3. 给天线加电,天线对准卫星。通过监控软件实时观测并记录AGC电压数值,记录5min数据;
-
4. 将数据中的AGC电压Vi转换为信号功率Pi。
-
5. 以静态测试时候的信号平均功率(P0-3dB)作为门限PT,统计5min数据Pi中低于门限PT的百分比。
-
6. 该百分比作为动态下动中通天线失锁率;
一般来说,这个天线失锁率必须小于0.1%。
动态条件下天线对星时间测试
-
1. 将天线安装在摇摆台上,摇摆台保持水平静止。天线连接电脑,电脑上运行监控软件;
-
2. 给天线加电,天线对准卫星之后,通过监控软件实时观测并记录AGC电压数值,记录5min数据,计算得到AGC电压平均值V0,并转换成信号功率P0。
-
3. 天线断电,启动摇摆台。
-
4. 给天线加电,开始计时;
-
5. 通过监控软件实时观测并记录AGC电压数据,同时转换成信号功率Pi。当信号功率Pi满足以下条件:|Pi-P0|≤1dB,停止计时,计算得到首次对星时间T1, 。
-
6. 按照上述方法连续测试3次,获得T1、T2、T3,并记录在测试记录表中;
-
7. 计算3次测量结果的平均值,获得动态下首次对星时间值.
动态条件下天线失锁重新捕获时间测试
-
1. 将天线安装在摇摆台上,摇摆台水平静止不动。天线连接计算机,计算机上运行监控软件;
-
2. 给天线加电,天线对准卫星。通过监控软件实时观测并记录AGC电压数值,记录5min数据,计算得到AGC电压的平均值V0,并转换成信号功率P0。
-
3. 启动摇摆台。
-
4. 在摇摆台转动情况下,天线能够正常对星,AGC电压转成后的信号功率Pi满足以下条件:|Pi-P0|≤1dB的条件。
-
5. 将天线遮挡,遮挡时间10s,确保Pi为噪声功率水平。
-
6. 将天线遮挡去除,开始计时。通过监控软件实时观测并记录AGC电压数据。AGC电压转成后的信号功率Pi满足:|Pi-P0|≤1dB的条件,停止计时,计算得到失锁重新捕获卫星时间T1;
-
7. 按照上述方法连续测试3次,获得T1、T2、T3,并记录在测试记录表中;
-
8. 计算3次测量结果的平均值,获得动态条件下失锁重新对星时间值
动中通天线跑车测试
动中通天线的跟踪性能测试侧重于指标测试,但是我们都知道任何设备能够在真实使用条件下正常工作,才能说明设备是可靠的、是满足要求的。
所以,我们还要模拟实际场景进行整机性能的测试。
在动中通天线领域,常规的整机测试方法是采用跑车测试。
对于机载动中通天线来说,最好的测试方法是把卫通终端(含动中通天线)安装在飞机上,然后测试机载卫通天线的跟踪性能。但是装机的条件不太容易实现,而且成本很高,所以一般都是在地面先做跑车测试。等到跑车测试通过之后,择机再开展装机飞行测试。
跑车测试的主要测试项目:
-
• 开机对星时间测试;
-
• 卫星切换时间测试;
-
• 不同运动场景下的跑车,跟踪性能测试,业务通信测试;
-
• 主要包括:直线运动,动态转圈,动态S弯,动态颠簸、动态遮挡等场景。
-
开机对星时间测试
-
1. 将天线安装在皮卡车上,车辆保持水平静止。天线连接电脑,电脑上运行监控软件;
-
2. 给天线加电,天线对准卫星之后,通过监控软件实时观测并记录AGC电压数值,记录5min数据,计算得到AGC电压平均值V0,转换成信号功率P0;
-
3. 天线断电。皮卡车以30km/h速度直线行驶,在行驶过程中天线加电,开始计时;
-
4. 通过监控软件实时观测AGC电压数据,当AGC电压值Vi满足以下条件:AGC电压转成后的信号功率Pi满足:|Pi-P0|≤1dB的条件,停止计时,计算得到首次对星时间T1。
-
5. 按照上述方法连续测试3次,获得T1、T2、T3,并记录在测试记录表中;
-
6. 计算3次测量结果的平均值,获得静态条件下首次对星时间。
跑车测试
跑车的场景分为直线前进,S转弯、动态转圈,动态颠簸,还有在跑车过程中遮挡然后重新捕获等。测试的方法和摇摆台动态测试的方法类似。我们以S转弯为例说明天线跟踪精度测试的方法:
-
1. 将天线安装在皮卡车上,车辆保持水平静止。天线连接电脑,电脑上运行监控软件;
-
2. 给天线加电,天线对准卫星之后,通过监控软件实时观测并记录AGC电压数值,记录5min数据,计算得到AGC电压平均值V0。
-
3. 皮卡车以30km/h速度S弯行驶,在行驶过程中天线加电并记录AGC电压数据Vi,测试记录时间不少于5min;
- 4. 按照下面的公式,计算得到AGC电压的均方根值Sd。
动态跟踪精度均方根
其中V0是静态跟踪精度测试环节的AGC平均值。
-
5. 将AGC电压的均方根Sd转换为信号功率(单位;dBm)Rd;
-
6. 均方根差Rd(单位:dBm)为跑车条件下天线跟踪精度值。
上面的方法是直接针对天线跟踪的AGC电压进行测试,还有一种常用的方法,通过卫通调制解调器的Eb/N0来进行测试。测试设备连接关系如下:
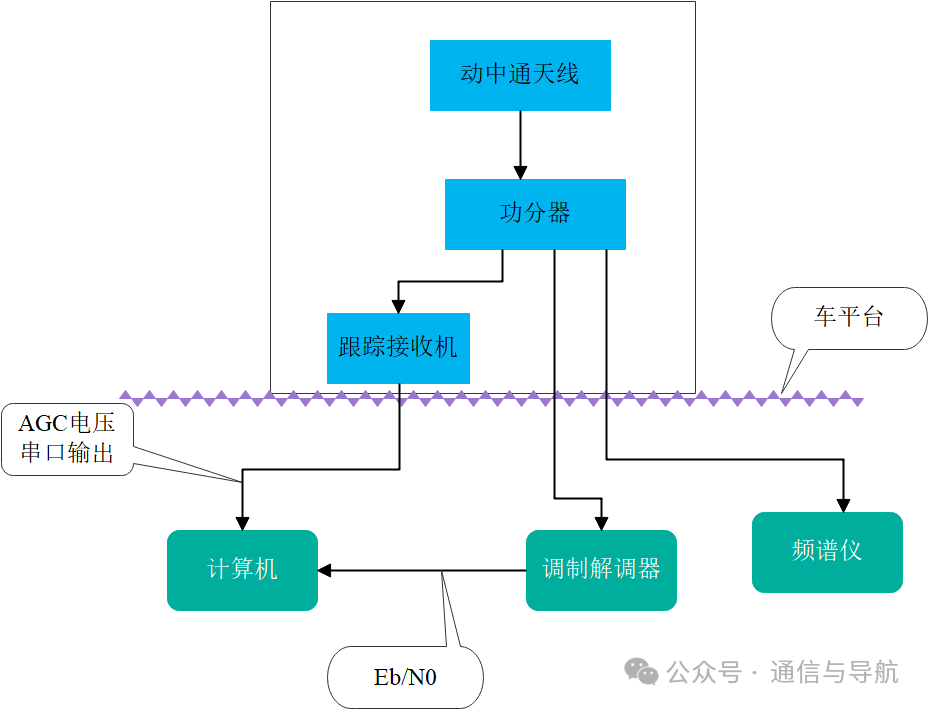
天线跑车测试调制解调器Eb/N0
1.在静态的情况下,通过调制解调器自发自收,统计记录Eb/N0的平均值作为基准。
2.在跑车过程中记录Eb/N0的数据。
3.分析统计跑车过程中Eb/N0的最大变化和标准差,作为动中通天线跟踪精度的测试结果。
由于动中通天线跟踪精度直接影响调制解调器的Eb/N0,因此通过测试调制解调器的Eb/N0也能够反映天线在跑车过程中的跟踪情况。
而且实际应用中,我们关心的最终结果就是业务数据的通信误码率是多少,能不能正常通信,这些都可以通过接收的Eb/N0来表示。
一般来讲,用Eb/N0的标准差≤1dB,最大偏差≤2dB作为合格标准。
码字不易,大家觉得文章不错,就安排一下一键三连吧:点赞、分享、推荐。