Ros真(node?package?)
Ros中 都是靠一个个节点相互配合的 如同APP之间的配合
然后节点不好单独存在, 我们一般把他们放在一个包里 也就是Package。
也可以自己设立一个包
如图这种

————————————
建立包 流程
:

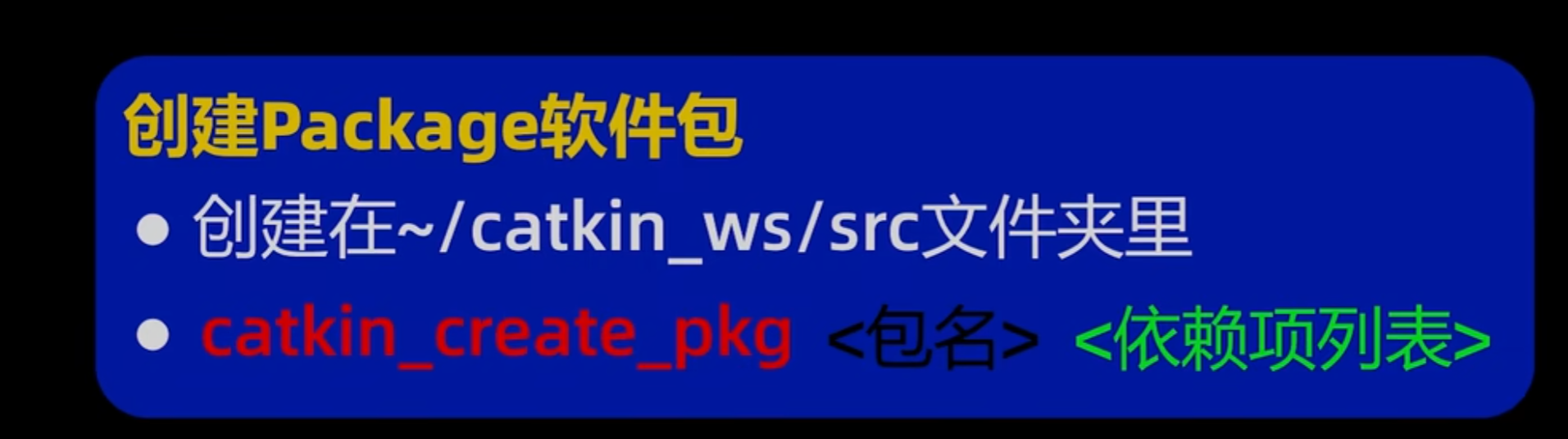
——————
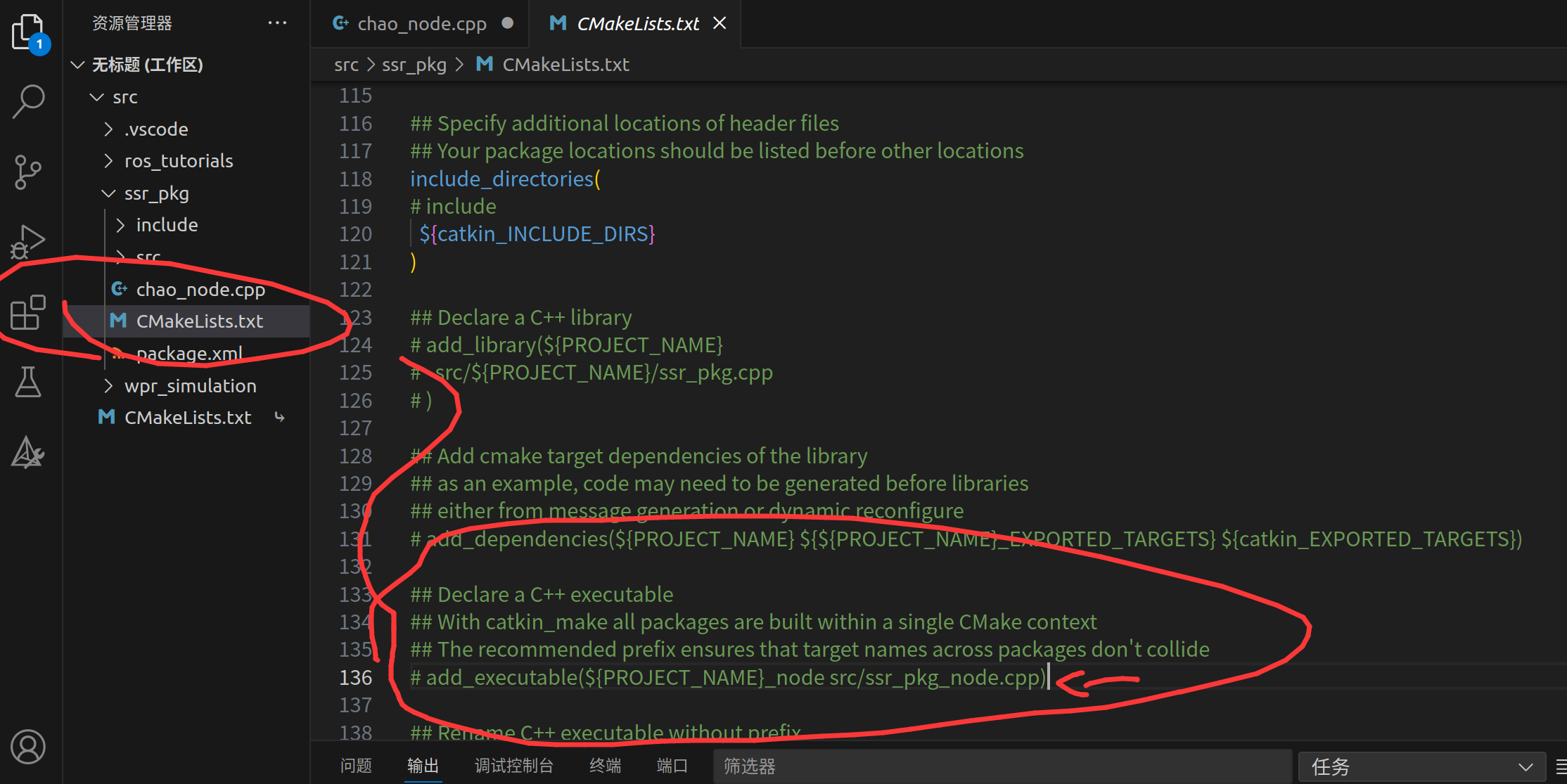
我们弄好之后 在VSCODE SRC右键 新建一个我们的代码即可 比如我们这个是超声波的
那就是chao_node.cpp
内部程序写好之后 我们就在这个cmake 找到Build下面这行文件 放到这个最底下 然后去掉井号
换一下包名什么的
——————————
这样我们c s b 把这玩意编译好之后 就可以ROSCORE 使用这个节点
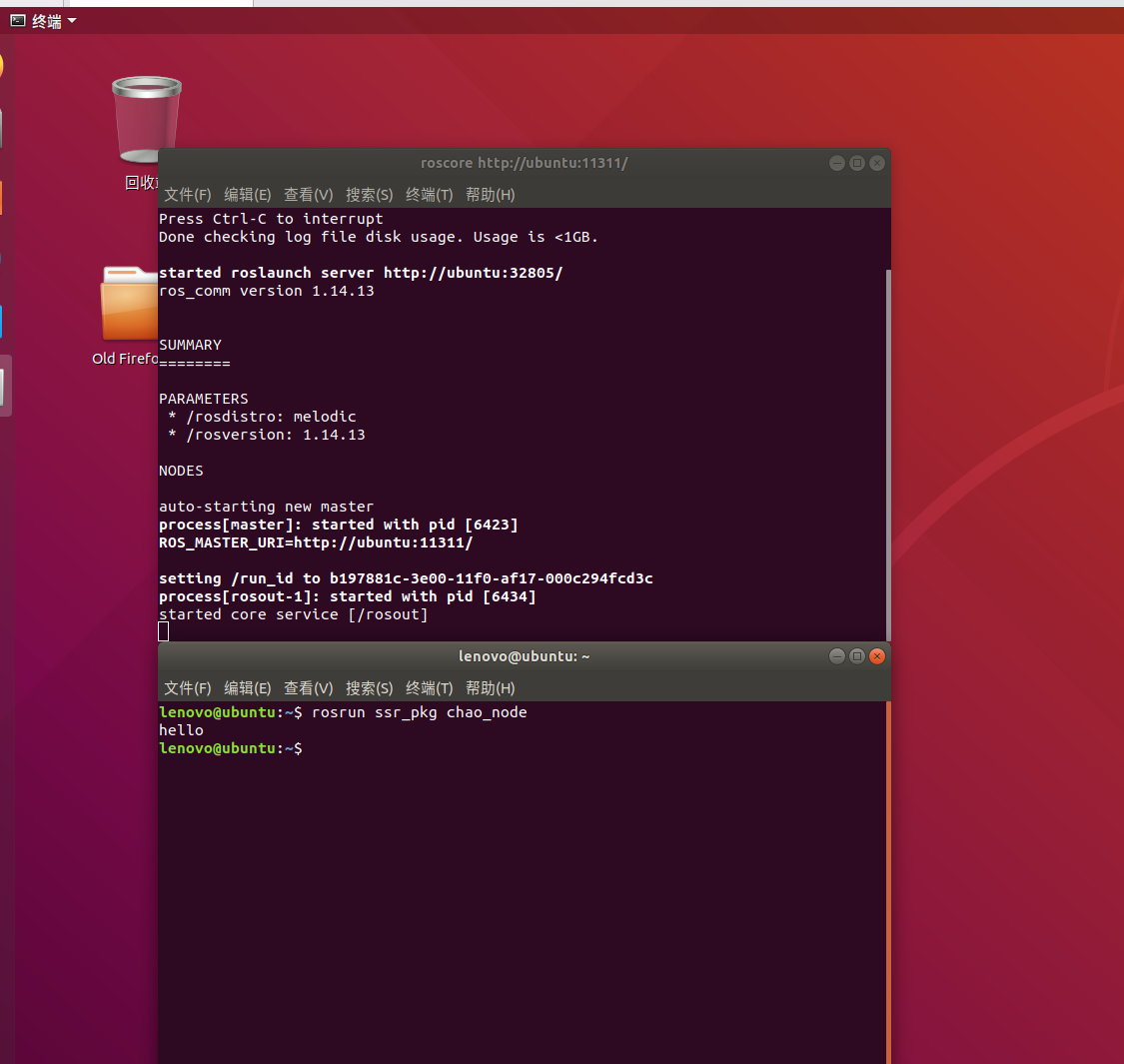
——————
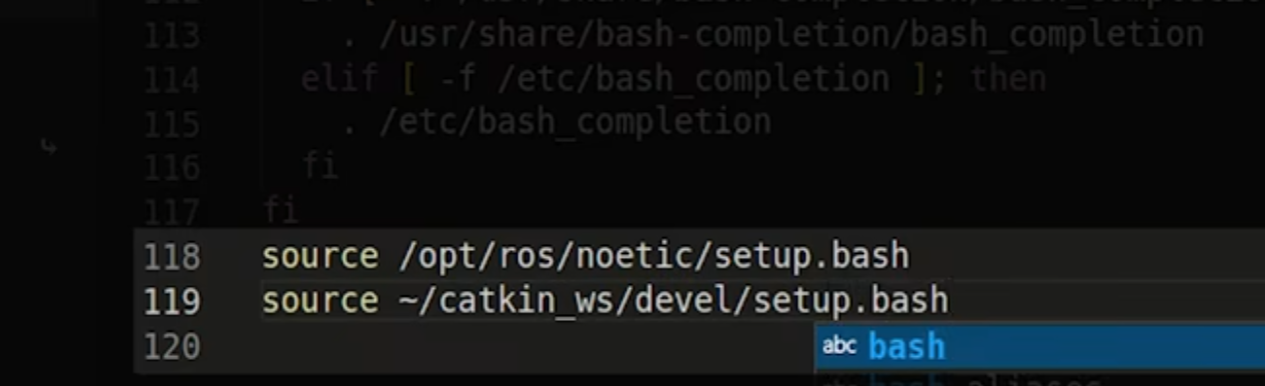
为了不用每次进行source

这样弹出的VSCODE 最后一行我们加入即可