随机响应噪声-极大似然估计
一、核心原因:噪声机制的数学可逆性
在随机响应机制(Randomized Response)中使用极大似然估计(Maximum Likelihood Estimation, MLE)是为了从扰动后的噪声数据中无偏地还原原始数据的统计特性。随机响应通过已知概率的扰动规则扭曲原始数据,其噪声过程满足:
-
扰动概率是预先设定的(如
 );
); -
噪声分布是已知的(如实回答概率 p,随机回答概率 1−p)。
这使得我们可以建立观测数据(扰动后)与真实数据的概率映射关系,从而通过极大似然估计反推真实参数。
二、极大似然估计的推导过程
以二值数据(是/否)为例:
-
真实数据分布:
-
假设人群中回答“是”的真实比例为 θ(待估计)。
-
-
扰动规则:
-
以概率 p 如实回答;
-
以概率 1−p随机回答(答“是”概率 0.5)。
-
-
观测数据概率:
-
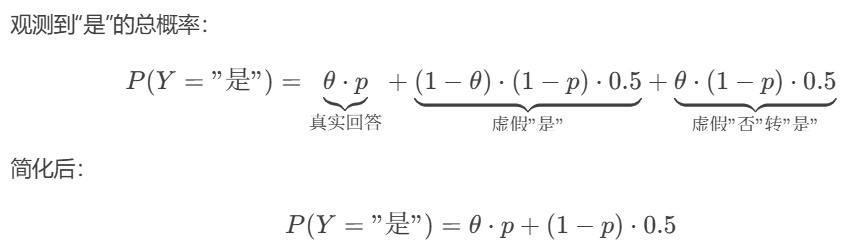
观测到“是”的总概率:
-
-
似然函数:
-
对 n个用户,观测到 k个“是”,似然函数为:

-
-
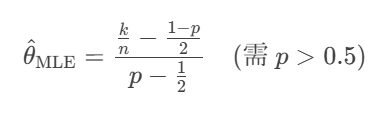
求解极大似然估计:
-
最大化 lnL(θ) 得到估计量:
-
三、为什么必须使用极大似然估计?
1. 无偏性保证
-
随机响应引入的噪声是系统性的(非随机噪声),传统均值计算会得到有偏结果。
-
MLE 通过概率模型修正偏差,满足
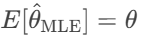 (无偏估计)。
(无偏估计)。
2. 信息充分利用
-
MLE(极大似然估计) 基于所有观测数据的联合概率分布求解,比简单线性变换更高效利用信息。
3. 统计最优性
-
当样本量足够大时,MLE(极大似然估计) 是最小方差无偏估计(Cramér-Rao 下界)。
四、实例说明
场景:调查患病率(真实 θ=0.2)
-
参数设定:ϵ=ln3 → p=0.75
-
100 个用户:
-
真实患者 20 人:其中 20×0.75=15 人如实答“是”;
-
健康者 80 人:其中 80×0.25×0.5=10 人随机答“是”。
-
-
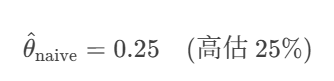
总观测值:k=15+10=25(即 25% 答“是”)。
传统均值(错误估计):
MLE 修正:

结果: (与真实值一致)。
(与真实值一致)。
五、数学本质:噪声的结构化概率模型
随机响应机制与拉普拉斯/高斯机制的核心差异在于噪声的生成逻辑与可逆性,这直接决定了为何需要极大似然估计(MLE)。
1. 随机响应:离散概率转移模型
随机响应的扰动过程是一个已知概率的离散信道,其本质是 条件概率的精确建模:
-
输入:真实数据 X∈{0,1}(例如 0=健康,1=患病)
-
输出:扰动数据 Y∈{0,1}
-
信道传输矩阵完全已知:

关键特性:
-
每个 P(Y∣X) 由预设规则显式定义(如
 );
); -
模型满足 可逆性:可通过贝叶斯定理反推 P(X∣Y).
-
2. 拉普拉斯/高斯机制:不可逆的连续噪声
中心化差分隐私的噪声机制本质不同:
-
输入:标量或向量查询结果
-
输出:

-
噪声完全随机化:
-
从连续分布采样,丢失原始数据与噪声的对应关系;
-
即使已知噪声分布,也无法唯一确定 f(D)(因方程
 有无穷解)。
有无穷解)。
-
3. 为什么仅随机响应需要 MLE?
| 特性 | 随机响应机制 | 拉普拉斯/高斯机制 |
|---|---|---|
| 噪声类型 | 结构化概率转移 | 连续随机叠加 |
| 可逆性 | ✓ 通过概率模型精确还原 | ✗ 不可逆(信息有损) |
| 参数估计目标 | 群体统计量 θ | 单个查询结果 f(D) |
| 估计方法 | 极大似然估计 (MLE) | 直接发布扰动值 |
根本原因:
-
随机响应的目标是 从扰动数据反推群体参数(如患病率 θ),其噪声过程是 已知概率映射,因此可通过 MLE 构建似然函数求解 θ。
-
拉普拉斯/高斯机制的目标是 隐藏单个查询的真实值,添加的噪声本身即是保护手段,无需(也无法)从噪声中还原原始值。
总结
| 机制 | 噪声类型 | 估计方法 | 关键原因 |
|---|---|---|---|
| 随机响应 | 离散概率扰动 | 极大似然估计 (MLE) | 噪声规则已知且可建模 |
| 拉普拉斯/高斯 | 连续随机噪声 | 直接发布扰动结果 | 噪声不可逆,仅能近似统计特性 |
核心结论:
随机响应机制中,只有通过极大似然估计才能从扰动数据中无偏还原真实参数,这是由其离散概率扰动特性决定的。随机响应机制的本质是一个人造的概率信道,其噪声规则是预先设计的结构化概率转移过程。这种结构保留了数据生成过程的完整数学描述,使得通过 MLE 无偏还原群体统计量成为可能。而连续噪声机制直接破坏原始数据的数值信息,其保护性依赖于噪声的不可逆性。