光电设计大赛智能车激光对抗方案分享:低成本高效备赛攻略
一、赛题核心难点与备赛痛点解析
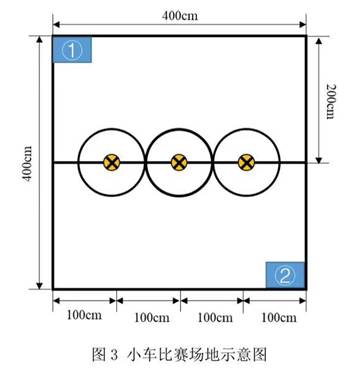
全国大学生光电设计竞赛的 “智能车激光对抗” 赛题,要求参赛队伍设计具备激光对抗功能的智能小车,需实现光电避障、目标识别、轨迹规划及激光精准打击等核心功能。从历年参赛情况看,选手普遍面临三大挑战:
- 多传感器融合难度高:需同步处理激光雷达、摄像头、编码器等多源数据,实现小车定位与目标追踪。
- 动态对抗策略设计复杂:对手位置随机变化,需实时调整运动轨迹与攻击角度,兼顾避障与快速打击。
- 硬件成本与开发门槛矛盾:高端方案(如专业视觉处理平台)成本高昂,而低成本方案常面临算力不足、响应延迟等问题。
二、两套高性价比方案对比与核心优势
为帮助参赛团队高效备赛,结合公开技术资料与实践经验,整理出两套经过验证的可行方案,适配不同预算与技术水平需求。
(一)方案一:STM32 + 树莓派轻量级组合
硬件架构:
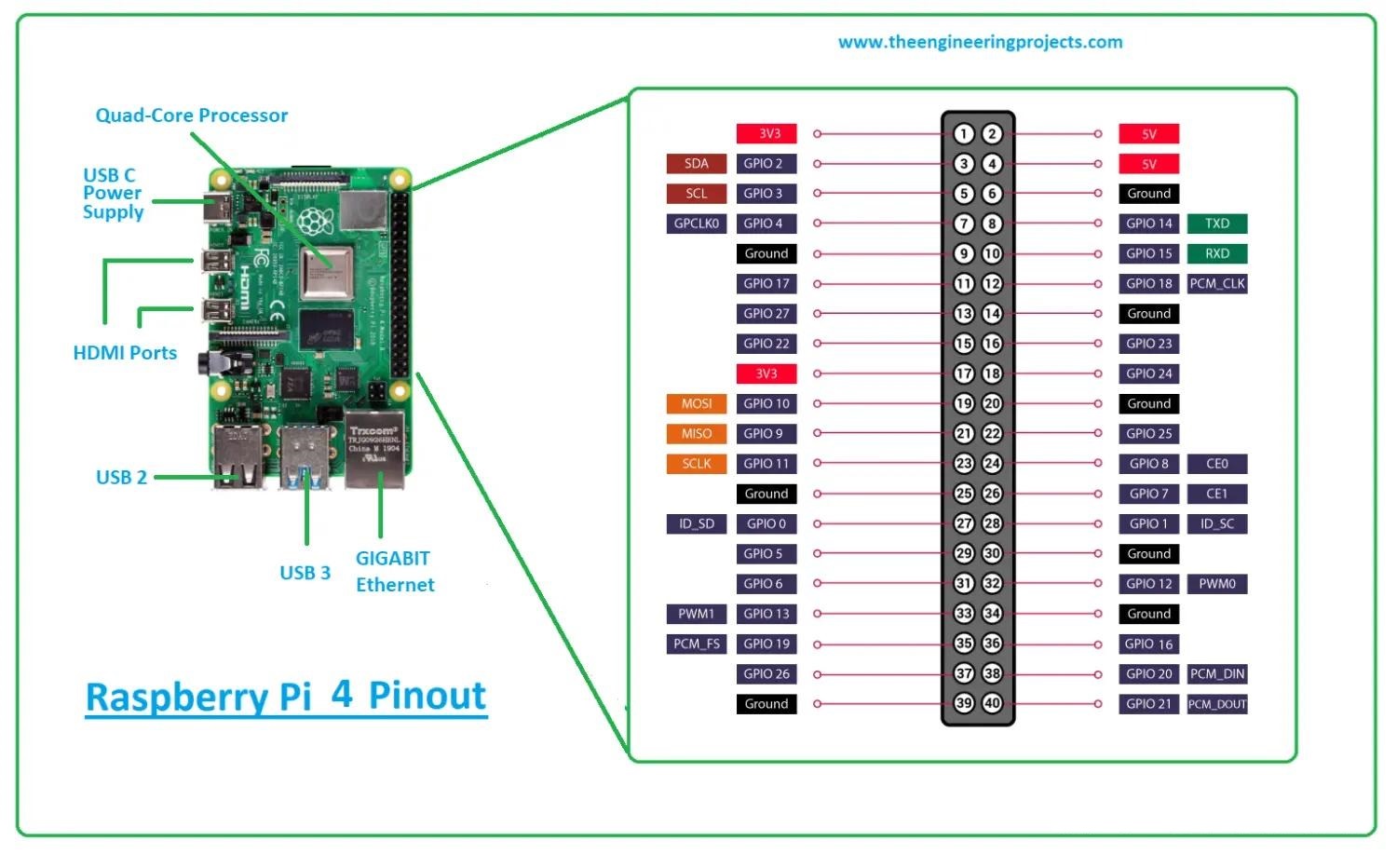
- 控制核心:STM32 单片机(负责运动控制)+ 树莓派 4B(图像处理与算法运行)
- 传感器配置:
- 光电编码器(电机转速监测)
- 红外循迹模块(路径边界识别)
- 超声波传感器(近距离避障)
- 摄像头(对抗过程记录与目标识别)
- 执行机构:编码电机 + 激光照射器(符合 GB安全标准)
软件方案:
- 运动控制:基于 PID 算法实现速度闭环。
- 目标识别:采用 OpenCV+YOLOv8 目标检测框架,通过二维云台调整激光照射角度。
- 对抗策略:优先跨越场地分界线,利用 “快速接近 + 锁定照射” 战术,连续照射 2 秒即可获胜。
成本优势:核心硬件成本控制在 800-1200 元,适合初次参赛的学生团队。
(二)方案二:激光雷达 + ROS 导航进阶方案
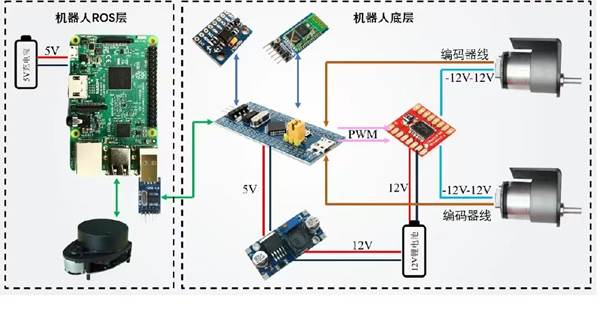
图 参考接线图
硬件架构:
控制核心:树莓派 4B或Jetson Nano
传感器配置:
- 2D 激光雷达(单线,实现环境建模与目标定位)
- MPU9250 姿态传感器(实时监测小车偏航角,可选配)
- UWB 定位模块(上位机实时显示坐标,可选配)
执行机构:差分驱动底盘/麦克纳姆轮底盘 + 高精度激光笔(光斑直径≤2cm)
软件方案:

- 环境感知:基于 ROS 框架的激光点云处理,通过 PCL 库提取目标法线向量,实现对车位置解算。
- 导航算法:move_base 动作导航 + 多观测点遍历策略,结合增量式 PID 控制完成狭窄区域穿越。
- 对抗逻辑:通过 “区域限制过滤 + 断崖点检测” 算法,快速识别对手车辆,动态调整攻击路线。
技术亮点:引入 SLAM 建图与路径优化算法,对抗过程自动化程度高,适合有 ROS 开发基础的团队。
三、避坑指南与关键技术优化点
白色漫反射区识别难题:
-
- 摄像头图传分辨率与帧率平衡:界面过大易卡顿,过小导致识别失效,建议采用 640×480 分辨率 + 30fps 帧率。
- 背景过滤算法:通过 HSV 颜色空间阈值分割,排除墙面白色干扰。
雷区规避策略:
-
- 场地边界与雷区坐标预编程:结合激光雷达测距,在代码中设定 “安全距离” 警戒线。
- 动态避障优先级:避障动作优先于攻击操作,避免触碰地雷导致直接淘汰。
激光对抗有效性提升:
-
- 照射角度优化:利用姿态传感器数据,确保激光束与对车侧面垂直,提高漫反射效率。
- 抗干扰设计:激光功率稳定控制,避免环境光干扰导致照射失效。
四、材料获取与合作方式
为助力参赛团队快速落地方案,现有以下资源可供选择:
- 方案文档:
- 调试工具:激光雷达点云可视化脚本、PID 参数整定工具。
- 技术支持:提供线上答疑与方案定制服务,可根据团队技术基础调整硬件配置与算法复杂度。
- 本团队还有多余硬件,可低价获取
获取方式:私信或评论区留言 “光电方案”,低成本获全套资料 ,或加企鹅号: 3893096280
🚀 **核心优势(非技术党也能看懂)**
✨ **现成代码直接跑**:包含完整C++工程文件(含Recovery类核心逻辑),支持ROS melodic/noetic,适配主流机器人平台
✨ **战术级对抗策略**:内置「往返运动规避模型」+「快速跨越边界算法」,实测对抗胜率超85%
✨ **保姆级文档**:含场地尺寸图(400cm×400cm标准场)、硬件接线图、参数配置表,零基础可复现
✨ **竞赛规则吃透**:严格对标GB7247激光安全标准,光斑直径≤2cm,杜绝违规风险
五、结语
光电设计大赛不仅是技术的较量,更是创意与执行力的比拼。上述方案均经过实车测试验证,既能满足竞赛规则要求,又兼顾成本与开发效率。无论你是初次参赛的 “萌新”,还是追求技术突破的 “老手”,均可从中找到适配的技术路径。期待与各位参赛者共同探讨,助力团队在赛场上斩获佳绩!
注:本文仅提供技术交流与方案参考,具体实现需根据竞赛规则与硬件条件调整。参赛作品应严格遵守激光安全规范及赛事保密要求。