电机控制学习笔记
文章目录
- 前言
- 一、电机
- 二、编码器
- 三、开环控制和闭环控制
- 总结
前言
学习了解电机控制技术的一些原理和使用的方法。
一、电机
直流有刷电机 操作简单 使用H桥驱动直流有刷电机 直流有刷电机驱动板
电压检测 电流检测以及温度检测
直流无刷电机 使用方波或者正弦波进行换向
步进电机使用脉冲信号控制,然后通过角速度和线速度来进行控制。
伺服电机的控制精度比较高,一般价格比较贵。
舵机可以反馈旋转的角度信息,舵机主要使用PWM的信号来进行控制。
二、编码器
将直线位移 角位移 线位移等数据转换成二进制数据的设备。
在电机中的应用就是相当于是获取电机的运行参数。
编码器,编码器有多种类型,根据应用需求选择合适的编码器非常重要:
增量式编码器:输出脉冲信号,用于测量速度和位置变化。
绝对式编码器:输出绝对位置信息,即使在断电后也能保持位置信息。
混合式编码器:结合了增量式和绝对式编码器的特点,提供高精度的位置和速度反馈。
脉冲计数 二进制码和格雷码 通过光电和磁电来进行计数
编码器在需要精确位置和速度控制的电机应用中非常重要。通过使用编码器,可以实现高精度的电机控制,提高系统的可靠性和性能。常见的需要使用编码器的电机类型包括直流无刷电机、交流伺服电机、步进电机、直流有刷电机、永磁同步电机、交流异步电机、线性电机和多相电机。根据具体的应用需求,选择合适的编码器类型和电机类型是实现高性能控制的关键。
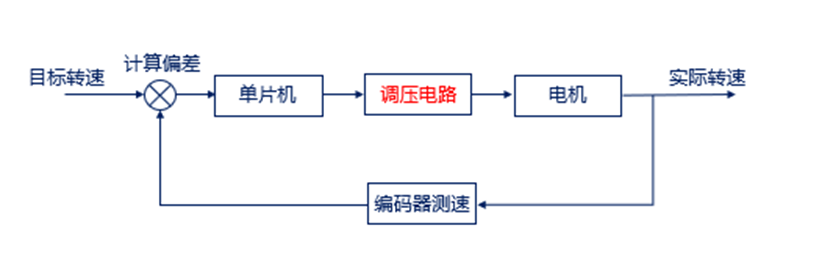
三、开环控制和闭环控制
开环控制 输出只受系统输入的控制影响,没有反馈回路,控制精度和抗干扰性比较差。
闭环控制 引入反馈网络 利用输出和输入值之间的偏差对系统进行控制,避免偏离预期目标。
PID算法中的比例环节是用来做什么的?
比例环节是为了让系统快速达到目标值。
积分环节的作用是消除稳态误差,即系统在达到平衡状态后仍然存在的误差。积分环节通过累加误差随时间的积分,来调整控制输出,使系统最终能够精确地达到目标值。
微分环节的作用是通过预测误差的变化趋势,提前调整控制输出,从而减少超调量和振荡,提高系统的稳定性和响应速度。
步进电机是一种将脉冲信号转换成角位移和线位移的电动机。步进电机拥有良好的开环控制能力。
梯形曲线和S型曲线。
总结
目前电机的控制技术在工业控制场合有着非常广泛的应用。对于电机控制领域的学习,需要了解电机的种类,编码器的作用,开环控制技术和闭环控制技术。