文章目录 双面相机标定链接 一维测量 gen_cam_par_area_scan_division -为区域扫描相机生成一个相机参数元组,该相机的变形由分割模型建模。(相机自带参数) create_calib_data -创建Halcon 数据标定模型 set_calib_data_cam_param -设置校准数据模型中摄像机的类型和初始参数。 set_calib_data_calib_object -设置标定板 find_calib_object -查找 HALCON 校准板,并将提取的点和等高线设置到校准数据模型中。 get_calib_data_observ_contours -从校准数据模型中获取基于等高线的观测数据。 calibrate_cameras - 标定相机 get_calib_data -查询校准数据模型中存储或计算的数据。 write_cam_par -写入相机参数 read_cam_par -读取相机参数 get_calib_data_observ_points -从校准数据模型中获取基于点的观测数据。 disp_caltab -在图像中投影并显示校准板的 3D 模型。 set_origin_pose -平移三维姿势的原点 clear_calib_data -清除标定板 image_points_to_world_plane -将图像点转换为世界坐标系的 z=0 平面。
gen_cam_par_area_scan_division ( : : Focus, Kappa, Sx, Sy, Cx, Cy, ImageWidth, ImageHeight : CameraParam)
Focus ( 输入控制) 实数 → ( 整数 / 实数) 主距离。默认值:0.008
Kappa ( 输入控制) 实数 → ( 整数 / 实数) 扭曲系数,用于建模径向镜头畸变。默认值:0.0
Sx ( 输入控制) 实数 → ( 整数 / 实数) 传感器上相邻单元之间的水平距离。默认值:5.2e-6
Sy ( 输入控制) 实数 → ( 整数 / 实数) 传感器上相邻单元之间的垂直距离。默认值:5.2e-6
Cx ( 输入控制) 实数 → ( 整数 / 实数) 图像中主点的列坐标。默认值:640
Cy ( 输入控制) 实数 → ( 整数 / 实数) 图像中主点的行坐标。默认值:512
ImageWidth ( 输入控制) 整数 → ( 整数) 图像宽度。默认值:1280
ImageHeight ( 输入控制) 整数 → ( 整数) 图像高度。默认值:1024
CameraParam ( 输出控制) campar- array → ( 整数 / 实数 / 字符串) 输出相机参数元组。
create_calib_data ( : : CalibSetup, NumCameras, NumCalibObjects : CalibDataID)
CalibSetup ( 输入控制) 字符串 → ( 字符串) 校准设置的类型。默认值:'calibration_object' 可选值列表:'calibration_object' , 'hand_eye_moving_cam' , 'hand_eye_scara_moving_cam' , 'hand_eye_scara_stationary_cam' , 'hand_eye_stationary_cam' NumCameras ( 输入控制) 数字 → ( 整数) 校准设置中相机的数量。默认值:1 限制条件:NumCameras >= 0 NumCalibObjects ( 输入控制) 数字 → ( 整数) 校准对象的数量。默认值:1 限制条件:NumCalibObjects >= 0 CalibDataID ( 输出控制) 校准数据 → ( 句柄) 创建的校准数据模型的句柄。'calibration_object' 的模型用于基于从校准物体观测中提取的度量信息,来校准一个或多个相机的内部参数(如焦距、畸变系数等)以及相机位姿(位置和方向)。类型为 'hand_eye_moving_cam' 、'hand_eye_stationary_cam' 、'hand_eye_scara_moving_cam' 或 'hand_eye_scara_stationary_cam' 的模型则用于执行手眼标定。这种标定基于对校准物体的观测数据,以及机器人工具在机器人基坐标系中的对应位姿数据。上述四种模型类型的区分有两个方面:是由机器人移动相机还是移动校准物体:moving_cam:表示校准物体固定不动,而相机由机器人移动。stationary_cam:表示相机固定不动,而校准物体由机器人移动。使用的机器人类型是六自由度的关节型机器人还是四自由度的 SCARA 机器人:关节型机器人(Articulated robot):具有三个旋转关节,通常可以覆盖6 个自由度(3 个平移 + 3 个旋转)。SCARA 机器人:具有两个平行的旋转关节和一个直线运动的滑动关节,仅能覆盖4 个自由度(3 个平移 + 1 个旋转)。通俗地讲:关节型机器人可以倾斜其末端执行器(例如机械手);SCARA 机器人只能进行平面内移动和旋转,不能倾斜末端执行器。
set_calib_data_cam_param ( : : CalibDataID, CameraIdx, CameraType, CameraParam : )
CalibDataID ( 输入控制,状态被修改) 校准数据 → ( 句柄) 一个校准数据模型的句柄。该句柄指向已创建或正在被修改的相机校准数据模型。注意:此参数在调用过程中会被修改,即更新校准数据模型的内容。CameraIdx ( 输入控制) 数组(数字类型) → ( 整数 / 字符串) 相机的索引号,用于指定当前操作的是哪一个相机。默认值:0 推荐值:'all' , 0 , 1 , 2 等(表示单个相机或所有相机)CameraType ( 输入控制) 字符串(数组可选) → ( 字符串) 指定相机的类型。默认值:[ ] (空)可选值列表:[ ] (根据具体系统实现,可能支持如 'area_scan' , 'line_scan' 等)CameraParam ( 输入控制) 相机参数 → ( 实数 / 整数 / 字符串) 初始的相机内部参数,通常是一个包含焦距、畸变系数、主点坐标等的元组或数组。示例值(可能结构):[ Focus, Kappa, Sx, Sy, Cx, Cy, ImageWidth, ImageHeight]
set_calib_data_calib_object ( : : CalibDataID, CalibObjIdx, CalibObjDescr : )
CalibDataID ( 输入控制,状态被修改) 校准数据 → ( 句柄) 校准数据模型的句柄。说明:该句柄指向一个已创建或正在被修改的校准数据模型。注意:此参数在调用过程中会被修改,表示对当前校准模型进行更新。CalibObjIdx ( 输入控制) 数字 → ( 整数) 校准物体的索引号,用于标识当前操作的是哪一个校准物体。默认值:0 推荐值:0 , 1 , 2 (根据实际存在的校准物体数量)CalibObjDescr ( 输入控制) 数组(可选)→ ( 实数 / 整数 / 字符串) 校准物体的描述信息,可以是:- 一个包含校准物体3 D点坐标的数组;- 或者是一个描述文件的文件名(字符串),用于指定校准板的几何结构和尺寸。可选值列表(常见校准板描述文件):'calplate.cpd' , 'calplate_10mm.cpd' , 'calplate_1200mm.cpd' , 'calplate_160mm.cpd' , 'calplate_20mm.cpd' , 'calplate_20mm_dark_on_light.cpd' , 'calplate_320mm.cpd' , 'calplate_40mm.cpd' , 'calplate_40mm_dark_on_light.cpd' , 'calplate_5mm.cpd' , 'calplate_640mm.cpd' , 'calplate_80mm.cpd' , 'calplate_80mm_dark_on_light.cpd' , 'caltab.descr' , 'caltab_100mm.descr' , 'caltab_10mm.descr' , 'caltab_200mm.descr' , 'caltab_2500um.descr' , 'caltab_30mm.descr' , 'caltab_650um.descr' , 'caltab_6mm.descr' , 'caltab_800mm.descr' , 'caltab_big.descr' , 'caltab_small.descr'
find_calib_object ( Image : : CalibDataID, CameraIdx, CalibObjIdx, CalibObjPoseIdx, GenParamName, GenParamValue : ) Image ( 输入对象) 单通道图像 → 对象 ( byte / uint2) 输入图像,通常为灰度图像或二值图像。用于检测校准物体(如标定板)的图像数据。CalibDataID ( 输入控制,状态被修改) 校准数据 → ( 句柄) 校准数据模型的句柄。说明:该句柄指向一个已创建或正在被修改的校准数据模型。注意:此参数在调用过程中会被修改,表示对当前校准模型进行更新。CameraIdx ( 输入控制) 数字 → ( 整数) 观测图像所对应的相机索引号。默认值:0 推荐值:0 , 1 , 2 (根据实际使用的相机数量)CalibObjIdx ( 输入控制) 数字 → ( 整数) 当前操作的校准物体索引号。默认值:0 推荐值:0 , 1 , 2 (根据实际存在的校准物体数量)CalibObjPoseIdx ( 输入控制) 数字 → ( 整数) 已观测到的校准物体位姿索引号,用于区分不同位姿下的观测。默认值:0 推荐值:0 , 1 , 2 限制条件:CalibObjPoseIdx >= 0 GenParamName ( 输入控制) 属性名数组 → ( 字符串) 要设置的通用参数名称列表。默认值:[ ] 可选参数名列表:'alpha' - 图像缩放因子'gap_tolerance' - 检测标记点之间的间隙容忍度'max_diam_marks' - 最大标记直径(像素)'sigma' - 高斯滤波标准差'skip_find_caltab' - 是否跳过查找标定板步骤(true/ false)GenParamValue ( 输入控制) 属性值数组 → ( 字符串 / 实数 / 整数) 与 GenParamName 对应的参数值。默认值:[ ] 推荐值示例:0.5 , 0.9 , 1.0 , 1.2 , 1.5 , 2.0 , 'true' , 'false'
get_calib_data_observ_contours ( : Contours : CalibDataID, ContourName, CameraIdx, CalibObjIdx, CalibObjPoseIdx : )
Contours ( 输出对象) xld_cont ( - 数组) → 对象基于轮廓的结果。此参数返回检测到的轮廓信息,例如标定板上的标记点轮廓或其他特征轮廓。CalibDataID ( 输入控制) 校准数据 → ( 句柄) 校准数据模型的句柄。说明:该句柄指向一个已创建的校准数据模型,从中可以获取校准相关的数据。ContourName ( 输入控制) 字符串 → ( 字符串) 要返回的轮廓对象名称。默认值:'marks' 可选值列表:'caltab' - 返回整个标定板的轮廓。'last_caltab' - 返回最后一个检测到的标定板的轮廓。'marks' - 返回标定板上所有标记点的轮廓。'marks_with_hole' - 返回带有孔洞的标记点轮廓(如果有)。CameraIdx ( 输入控制) 数字 → ( 整数) 观测相机的索引号。默认值:0 CalibObjIdx ( 输入控制) 数字 → ( 整数) 观测到的校准板的索引号。默认值:0 CalibObjPoseIdx ( 输入控制) 数字 → ( 整数) 观测到的校准物体姿态的索引号。默认值:0
calibrate_cameras ( : : CalibDataID : Error)
get_calib_data ( : : CalibDataID, ItemType, ItemIdx, DataName : DataValue)
CalibDataID ( 输入控制) 校准数据 → ( 句柄) 校准数据模型的句柄。说明:该句柄指向一个已创建的校准数据模型,从中可以获取或设置校准相关的数据。ItemType ( 输入控制) 字符串 → ( 字符串) 校准数据项的类型。默认值:'camera' 可选值列表:'calib_obj' - 校准物体'calib_obj_pose' - 校准物体姿态'camera' - 相机'model' - 模型'tool' - 工具ItemIdx ( 输入控制) 整数( - 数组) → ( 整数 / 字符串) 影响项的索引(根据所选的 ItemType)。默认值:0 推荐值:0 , 1 , 2 , 'general' DataName ( 输入控制) 属性名( - 数组) → ( 字符串) 要检查的数据名称。默认值:'params' 可选值列表:'base_in_cam_pose' , 'base_in_cam_pose_covariances' , 'base_in_cam_pose_deviations' , . . . (更多选项包括相机校准误差、手眼校准误差、初始参数、初始姿态等)DataValue ( 输出控制) 属性值( - 数组) → ( 实数 / 整数 / 字符串) 请求的数据。这是从校准数据模型中提取出的具体数值或信息。
write_cam_par ( : : CameraParam, CamParFile : )
read_cam_par ( : : CamParFile : CameraParam)
get_calib_data_observ_points ( : : CalibDataID, CameraIdx, CalibObjIdx, CalibObjPoseIdx : Row, Column, Index, Pose)
CalibDataID ( 输入控制) 校准数据 → ( 句柄) 校准数据模型的句柄。说明:该句柄指向一个已创建并配置好的校准数据模型。CameraIdx ( 输入控制) 数字 → ( 整数) 观测图像所对应的相机索引号。默认值:0 推荐值:0 , 1 , 2 (根据实际使用的相机数量)CalibObjIdx ( 输入控制) 数字 → ( 整数) 被观测的校准物体索引号。默认值:0 推荐值:0 , 1 , 2 (根据实际存在的校准物体数量)CalibObjPoseIdx ( 输入控制) 数字 → ( 整数) 已观测到的校准物体姿态索引号,用于区分不同位姿下的观测。默认值:0 推荐值:0 , 1 , 2 限制条件:CalibObjPoseIdx >= 0 Row ( 输出控制) 数组(数字类型)→ ( 实数 / 整数) 检测到的特征点在图像中的行坐标(像素单位)。Column ( 输出控制) 数组(数字类型)→ ( 实数 / 整数) 检测到的特征点在图像中的列坐标(像素单位)。Index ( 输出控制) 数组(数字类型)→ ( 整数 / 实数) 表示检测到的图像点与校准物体上对应点之间的映射关系。每个元素表示该校正点在校准物体上的编号索引。Pose ( 输出控制) 数组(数字类型)→ ( 实数 / 整数) 校准物体相对于观测相机的粗略估计位姿(姿态 + 位置)。输出包含7 个元素:- 前3 个是旋转角度(Rx, Ry, Rz),单位通常是弧度或度;- 后4 个是平移向量(Tx, Ty, Tz)和一个比例因子或额外参数;具体格式可能依赖于所用的库或系统实现。
disp_caltab ( : : WindowHandle, CalPlateDescr, CameraParam, CalPlatePose, ScaleFac : )
WindowHandle ( 输入控制) 窗口 → ( 句柄) 显示校准板图形的窗口句柄。说明:用于在指定的图像窗口中可视化校准板模型。CalPlateDescr ( 输入控制) 文件名(读取) → ( 字符串) 校准板描述文件的文件名,包含校准点的3 D坐标信息。默认值:'calplate_320mm.cpd' 可选值列表:'calplate_10mm.cpd' , 'calplate_1200mm.cpd' , 'calplate_160mm.cpd' , 'calplate_20mm.cpd' , 'calplate_20mm_dark_on_light.cpd' , 'calplate_320mm.cpd' , 'calplate_40mm.cpd' , 'calplate_40mm_dark_on_light.cpd' , 'calplate_5mm.cpd' , 'calplate_640mm.cpd' , 'calplate_80mm.cpd' , 'calplate_80mm_dark_on_light.cpd' , 'caltab_100mm.descr' , 'caltab_10mm.descr' , 'caltab_200mm.descr' , 'caltab_2500um.descr' , 'caltab_30mm.descr' , 'caltab_650um.descr' , 'caltab_6mm.descr' , 'caltab_800mm.descr' , 'caltab_big.descr' , 'caltab_small.descr' 支持的文件扩展名:. cpd(校准板文件)、. descr(描述文件)CameraParam ( 输入控制) 相机参数 → ( 实数 / 整数 / 字符串) 相机的内部参数(内参),通常包括焦距、主点、像素尺寸和畸变系数等。示例结构(顺序可能不同):[ Focus, Kappa, Sx, Sy, Cx, Cy, ImageWidth, ImageHeight] CalPlatePose ( 输入控制) 位姿 → ( 实数 / 整数) 校准板相对于相机坐标系的外部位姿(即校准板在空间中的位置和方向)。元素个数:7 前3 个元素为旋转角度(Rx, Ry, Rz),后4 个为平移向量(Tx, Ty, Tz)及一个附加参数(如比例因子或四元数的一部分),具体格式依赖于所用系统。ScaleFac ( 输入控制) 实数 → ( 实数) 可视化缩放因子,用于调整校准板在窗口中的显示大小。默认值:1.0 推荐值:0.5 , 1.0 , 2.0 , 3.0 推荐增量步长:0.05 限制条件:ScaleFac > 0.0
set_origin_pose ( : : PoseIn, DX, DY, DZ : PoseNewOrigin)
PoseIn ( 输入控制) 姿态 → ( 实数 / 整数) 原始的三维姿态信息。元素数量:7 DX ( 输入控制) 实数 → ( 实数) 在X轴方向上的原点平移量。默认值:0 DY ( 输入控制) 实数 → ( 实数) 在Y轴方向上的原点平移量。默认值:0 DZ ( 输入控制) 实数 → ( 实数) 在Z轴方向上的原点平移量。默认值:0 PoseNewOrigin ( 输出控制) 姿态 → ( 实数 / 整数) 应用平移后的新的三维姿态。元素数量:7
clear_calib_data ( : : CalibDataID : )
image_points_to_world_plane ( : : CameraParam, WorldPose, Rows, Cols, Scale : X, Y)
# 参数说明:相机内部参数
CameraParam: 输入控制参数 ( real / integer / string)
# 描述:相机的内部参数,例如焦距、光学中心等信息# 参数说明:世界坐标系在相机坐标中的3 D姿态
WorldPose: 输入控制参数 ( real / integer)
# 描述:在相机坐标系中世界坐标系的3 D姿态(位置和方向)
# 元素数量:7 (通常包含位置x, y, z和旋转表示)# 参数说明:待转换点的行坐标数组
Rows: 输入控制参数 ( real / integer)
# 默认值:100.0
# 描述:待转换点的Y轴坐标# 参数说明:待转换点的列坐标数组
Cols: 输入控制参数 ( real / integer)
# 默认值:100.0
# 描述:待转换点的X轴坐标# 参数说明:比例或维度
Scale: 输入控制参数 ( string / integer / real)
# 默认值:'m' (米)
# 建议值:'m' , 'cm' , 'mm' , 'microns' , 'um' , 1.0 , 0.01 , 0.001 , 1.0e-6 , 0.0254 , 0.3048 , 0.9144
# 限制条件:必须大于0
# 描述:用于指定尺度或尺寸,确保不同单位下的测量值能够正确转换# 参数说明:转换后点的世界坐标系下的X坐标
X: 输出控制参数 ( real)
# 描述:输出点在世界坐标系下的X坐标# 参数说明:转换后点的世界坐标系下的Y坐标
Y: 输出控制参数 ( real)
# 描述:输出点在世界坐标系下的Y坐标
ImgPath : = '3d_machine_vision/calib/'
dev_close_window ( )
dev_open_window ( 0 , 0 , 652 , 494 , 'black' , WindowHandle)
dev_update_off ( )
dev_set_draw ( 'margin' )
dev_set_line_width ( 3 )
set_display_font ( WindowHandle, 14 , 'mono' , 'true' , 'false' )
*
* Calibrate the camera.
*
gen_cam_par_area_scan_division ( 0.016 , 0 , 0.0000074 , 0.0000074 , 326 , 247 , 652 , 494 , StartCamPar)
* 创建标定板
create_calib_data ( 'calibration_object' , 1 , 1 , CalibDataID)
* 设置相机参数
set_calib_data_cam_param ( CalibDataID, 0 , [ ] , StartCamPar)
* 设置标定板
set_calib_data_calib_object ( CalibDataID, 0 , 'caltab_30mm.descr' )
NumImages : = 10
* Note, we do not use the image from which the pose of the measurement plane can be derived
for I : = 1 to NumImages by 1 read_image ( Image, ImgPath + 'calib_' + I$'02d' ) dev_display ( Image) * 发现标定板find_calib_object ( Image, CalibDataID, 0 , 0 , I, [ ] , [ ] ) * 获取标定轮廓get_calib_data_observ_contours ( Caltab, CalibDataID, 'caltab' , 0 , 0 , I) dev_set_color ( 'green' ) dev_display ( Caltab)
endfor
* 标定相机
calibrate_cameras ( CalibDataID, Error)
* 获取标定参数
get_calib_data ( CalibDataID, 'camera' , 0 , 'params' , CamParam)
* Write the internal camera parameters to a file 写入
write_cam_par ( CamParam, 'camera_parameters.dat' )
Message : = 'Interior camera parameters have'
Message[ 1 ] : = 'been written to file'
disp_message ( WindowHandle, Message, 'window' , 12 , 12 , 'red' , 'false' )
clear_calib_data ( CalibDataID)
* Attention:
* 注意:
* This program reads the internal camera parameters from the file
* 本程序从文件中读取相机内部参数
* 'camera_parameters.dat' , which, e. g. , could be generated by the program
* 文件'camera_parameters.dat' 可由程序
* 'camera_calibration_internal.hdev' generate
* 'camera_calibration_internal.hdev' 生成* 定义图像路径
ImgPath : = '3d_machine_vision/calib/' * 关闭当前窗口并打开新窗口
dev_close_window ( )
dev_open_window ( 0 , 0 , 652 , 494 , 'black' , WindowHandle) * 关闭自动更新显示
dev_update_off ( ) * 设置绘图模式为边缘
dev_set_draw ( 'margin' ) * 设置线宽为1
dev_set_line_width ( 1 ) * 设置显示字体
set_display_font ( WindowHandle, 14 , 'mono' , 'true' , 'false' ) * 尝试从文件读取相机参数
try* 读取相机标定参数read_cam_par ( 'camera_parameters.dat' , CamParam)
catch ( Exception) * 如果失败提示先运行标定程序* run 'camera_calibration_internal.hdev' first to generate camera* parameter file 'camera_parameters.dat' stop ( )
endtry* 从图像点确定外部相机参数和世界坐标
* 外部相机参数可以通过标定板直接放置在测量平面上的图像确定* 读取图像
read_image ( Image, ImgPath + 'calib_11' )
dev_display ( Image) * 定义标定板描述文件
CaltabName : = 'caltab_30mm.descr' * 创建标定数据
create_calib_data ( 'calibration_object' , 1 , 1 , CalibDataID) * 这里最终相机参数已知,可以用来代替初始值
* 设置相机参数
set_calib_data_cam_param ( CalibDataID, 0 , [ ] , CamParam) * 设置标定对象
set_calib_data_calib_object ( CalibDataID, 0 , CaltabName) * 查找标定板
find_calib_object ( Image, CalibDataID, 0 , 0 , 1 , [ ] , [ ] ) * 获取标定板轮廓
get_calib_data_observ_contours ( Caltab, CalibDataID, 'caltab' , 0 , 0 , 1 ) * 获取标定板点坐标
get_calib_data_observ_points ( CalibDataID, 0 , 0 , 1 , RCoord, CCoord, Index, PoseForCalibrationPlate) * 设置颜色为绿色并显示标定板轮廓
dev_set_color ( 'green' )
dev_display ( Caltab) * 设置颜色为红色
dev_set_color ( 'red' ) * 显示标定板
disp_caltab ( WindowHandle, CaltabName, CamParam, PoseForCalibrationPlate, 1 ) * 设置线宽为3
dev_set_line_width ( 3 ) * 显示标定板上的圆点
disp_circle ( WindowHandle, RCoord, CCoord, gen_tuple_const ( | RCoord| , 1.5 ) ) * 考虑标定板厚度,调整Z值
* 如果不想添加校正,请禁用下面一行
set_origin_pose ( PoseForCalibrationPlate, 0 , 0 , 0.00075 , PoseForCalibrationPlate) * 清除标定数据
clear_calib_data ( CalibDataID) * 显示继续消息
disp_continue_message ( WindowHandle, 'black' , 'true' )
stop ( ) * 或者,可以通过至少三个点对应关系确定外部相机参数
* 这些点在世界坐标系和像素坐标系中有对应关系* 读取新图像
read_image ( Image, ImgPath + 'caliper_01' )
dev_display ( Image) * 设置规则上三个点的世界坐标
X : = [ 0 , 50 , 100 , 80 ]
Y : = [ 5 , 0 , 5 , 0 ]
Z : = [ 0 , 0 , 0 , 0 ] * 设置三个点对应的图像平面坐标
RCoord : = [ 414 , 227 , 85 , 128 ]
CCoord : = [ 119 , 318 , 550 , 448 ] * 显示十字标记
disp_cross ( WindowHandle, RCoord, CCoord, 6 , 0 ) * 通过点对应关系计算位姿
vector_to_pose ( X, Y, Z, RCoord, CCoord, CamParam, 'iterative' , 'error' , FinalPose, Errors) * 将位姿写入文件
write_pose ( FinalPose, 'pose_from_three_points.dat' ) * 现在将交互测量的点转换到世界坐标系
dev_update_window ( 'on' )
dev_display ( Image)
while ( 1 ) * 显示测量提示消息disp_message ( WindowHandle, 'Measure one point: left mouse button', ' window', 12, 12, ' red', ' false') disp_message ( WindowHandle, 'Exit measure mode: right mouse button', ' window', 36, 12, ' red', ' false') * 获取鼠标点击get_mbutton ( WindowHandle, Row, Column, Button) if ( Button == 4 ) break endif* 显示图像和测量点dev_display ( Image) dev_set_color ( 'green' ) disp_cross ( WindowHandle, Row, Column, 6 , 0 ) * 将图像点转换到世界平面image_points_to_world_plane ( CamParam, FinalPose, Row, Column, 1 , X1, Y1) * 显示世界坐标disp_message ( WindowHandle, 'X = ' + X1, 'window' , 320 , 400 , 'red' , 'false' ) disp_message ( WindowHandle, 'Y = ' + Y1, 'window' , 340 , 400 , 'red' , 'false' )
endwhile* 应用测量工具并将结果点坐标转换到世界坐标系
dev_set_color ( 'red' )
dev_display ( Image) * 设置定义测量工具ROI的四个点的世界坐标 ,卡尺坐标点
ROI_X_WCS : = [ - 2 , - 2 , 112 , 112 ]
ROI_Y_WCS : = [ 0 , 0.5 , 0.5 , 0 ]
ROI_Z_WCS : = [ 0 , 0 , 0 , 0 ] * 确定从世界坐标系到相机坐标系的变换矩阵
pose_to_hom_mat3d ( FinalPose, CCS_HomMat_WCS) * 将点坐标转换到图像坐标系
affine_trans_point_3d ( CCS_HomMat_WCS, ROI_X_WCS, ROI_Y_WCS, ROI_Z_WCS, CCS_RectangleX, CCS_RectangleY, CCS_RectangleZ)
project_3d_point ( CCS_RectangleX, CCS_RectangleY, CCS_RectangleZ, CamParam, RectangleRow, RectangleCol) * 创建ROI区域
gen_region_polygon_filled ( ROI, RectangleRow, RectangleCol)
smallest_rectangle2 ( ROI, RowCenterROI, ColCenterROI, PhiROI, Length1ROI, Length2ROI) * 创建测量对象
gen_measure_rectangle2 ( RowCenterROI, ColCenterROI, PhiROI, Length1ROI, Length2ROI, 652 , 494 , 'bilinear' , MeasureHandle) * 执行边缘对测量
measure_pairs ( Image, MeasureHandle, 0.4 , 5 , 'all_strongest' , 'all' , RowEdgeFirst, ColumnEdgeFirst, AmplitudeFirst, RowEdgeSecond, ColumnEdgeSecond, AmplitudeSecond, IntraDistance, InterDistance) * 关闭测量对象
close_measure ( MeasureHandle)
dev_display ( Image) * 显示测量消息
disp_message ( WindowHandle, 'Measuring the position of the pitch lines', ' window', 450, 25, ' red', ' false')
dev_set_color ( 'green' ) * 计算并显示中线
RowPitchLine : = ( RowEdgeFirst + RowEdgeSecond) / 2.0
ColPitchLine : = ( ColumnEdgeFirst + ColumnEdgeSecond) / 2.0
disp_cross ( WindowHandle, RowPitchLine, ColPitchLine, 6 , 0 ) * 将中线点转换到世界平面
image_points_to_world_plane ( CamParam, FinalPose, RowPitchLine, ColPitchLine, 1 , X1, Y1) * 显示测量结果
for I : = 1 to | X1| by 1 set_tposition ( WindowHandle, RowEdgeFirst[ I - 1 ] + 5 , ColumnEdgeFirst[ I - 1 ] - 20 ) if ( I == | X1| ) set_tposition ( WindowHandle, RowEdgeFirst[ I - 1 ] , ColumnEdgeFirst[ I - 2 ] ) endifwrite_string ( WindowHandle, X1[ I - 1 ] $'.3f' + 'mm' )
endfor* 显示继续消息
disp_continue_message ( WindowHandle, 'black' , 'true' )
stop ( ) * 应用线提取并将结果XLD轮廓转换到世界坐标系
dev_display ( Image) * 设置定义ROI的四个点的世界坐标
ROI_X_WCS : = [ 11 , 11 , 13 , 13 ]
ROI_Y_WCS : = [ 4 , 6 , 6 , 4 ]
ROI_Z_WCS : = [ 0 , 0 , 0 , 0 ] * 将点坐标转换到图像坐标系
affine_trans_point_3d ( CCS_HomMat_WCS, ROI_X_WCS, ROI_Y_WCS, ROI_Z_WCS, CCS_RectangleX, CCS_RectangleY, CCS_RectangleZ)
project_3d_point ( CCS_RectangleX, CCS_RectangleY, CCS_RectangleZ, CamParam, RectangleRow, RectangleCol) * 在原始图像中可视化矩形
disp_polygon ( WindowHandle, [ RectangleRow, RectangleRow[ 0 ] ] , [ RectangleCol, RectangleCol[ 0 ] ] )
dev_display ( Image) * 创建ROI区域
gen_region_polygon_filled ( ROI, RectangleRow, RectangleCol)
reduce_domain ( Image, ROI, ImageReduced) * 提取线条
lines_gauss ( ImageReduced, Lines, 1 , 3 , 8 , 'dark' , 'true' , 'bar-shaped' , 'true' ) * 调整测量平面的位姿以适应游标尺的倾斜平面
RelPose : = [ 0 , 3.2 , 0 , - 14 , 0 , 0 , 0 ]
pose_to_hom_mat3d ( FinalPose, HomMat3D)
pose_to_hom_mat3d ( RelPose, HomMat3DRel)
hom_mat3d_compose ( HomMat3D, HomMat3DRel, HomMat3DAdapted) * 也可以使用hom_mat3d_translate_local和hom_mat3d_rotate_local操作符进行调整
hom_mat3d_translate_local ( HomMat3D, 0 , 3.2 , 0 , HomMat3DTranslate)
hom_mat3d_rotate_local ( HomMat3DTranslate, rad ( - 14 ) , 'x' , HomMat3DAdapted)
hom_mat3d_to_pose ( HomMat3DAdapted, PoseAdapted) * 使用调整后的位姿将XLD轮廓转换到世界坐标系
contour_to_world_plane_xld ( Lines, ContoursTrans, CamParam, PoseAdapted, 1 )
get_contour_xld ( ContoursTrans, YOfContour, XOfContour)
tuple_mean ( XOfContour, MeterReading) * 显示线条和读数
dev_display ( Lines)
disp_message ( WindowHandle, 'Meter reading: ' + MeterReading$'.3f' + 'mm' , 'window' , 400 , 180 , 'green' , 'false' ) * 显示继续消息
disp_continue_message ( WindowHandle, 'black' , 'true' )
stop ( ) * 关闭检查控件
dev_close_inspect_ctrl ( YOfContour)
dev_close_inspect_ctrl ( XOfContour) * 现在转换整个图像
WidthMappedImage : = 652
HeightMappedImage : = 494
dev_display ( Image) * 首先确定映射的比例
* ( 这里确定比例使得在点P0和P1周围,
* 映射图像的图像比例与原始图像的图像比例相似)
distance_pp ( X[ 0 ] , Y[ 0 ] , X[ 1 ] , Y[ 1 ] , DistP0P1WCS)
distance_pp ( RCoord[ 0 ] , CCoord[ 0 ] , RCoord[ 1 ] , CCoord[ 1 ] , DistP0P1PCS)
Scale : = DistP0P1WCS / DistP0P1PCS* 然后确定set_origin_pose的参数设置,
* 使得通过get_mbutton定义的点位于映射图像的中心
dev_display ( Image)
disp_message ( WindowHandle, 'Define the center of the mapped image', ' window', 12, 12, ' red', ' false')
get_mbutton ( WindowHandle, CenterRow, CenterColumn, Button1)
image_points_to_world_plane ( CamParam, FinalPose, CenterRow, CenterColumn, 1 , CenterX, CenterY)
set_origin_pose ( FinalPose, CenterX - Scale * WidthMappedImage / 2.0 , CenterY - Scale * HeightMappedImage / 2.0 , 0 , PoseNewOrigin) * 生成图像到世界平面的映射
gen_image_to_world_plane_map ( Map, CamParam, PoseNewOrigin, 652 , 494 , WidthMappedImage, HeightMappedImage, Scale, 'bilinear' )
map_image ( Image, Map, ImageMapped) * 显示映射后的图像
dev_clear_window ( )
dev_display ( ImageMapped) * 如果只需要映射一个图像,可以使用image_to_world_plane操作符
* 代替gen_image_to_world_plane_map和map_image操作符
image_to_world_plane ( Image, ImageMapped, CamParam, PoseNewOrigin, WidthMappedImage, HeightMappedImage, Scale, 'bilinear' )
ImgPath : = '3d_machine_vision/calib/'
dev_close_window ( )
dev_open_window ( 0 , 0 , 640 , 480 , 'black' , WindowHandle)
dev_update_off ( )
dev_set_draw ( 'margin' )
dev_set_line_width ( 3 )
set_display_font ( WindowHandle, 22 , 'mono' , 'true' , 'false' )
*
* Calibrate the camera. 相机标定
*
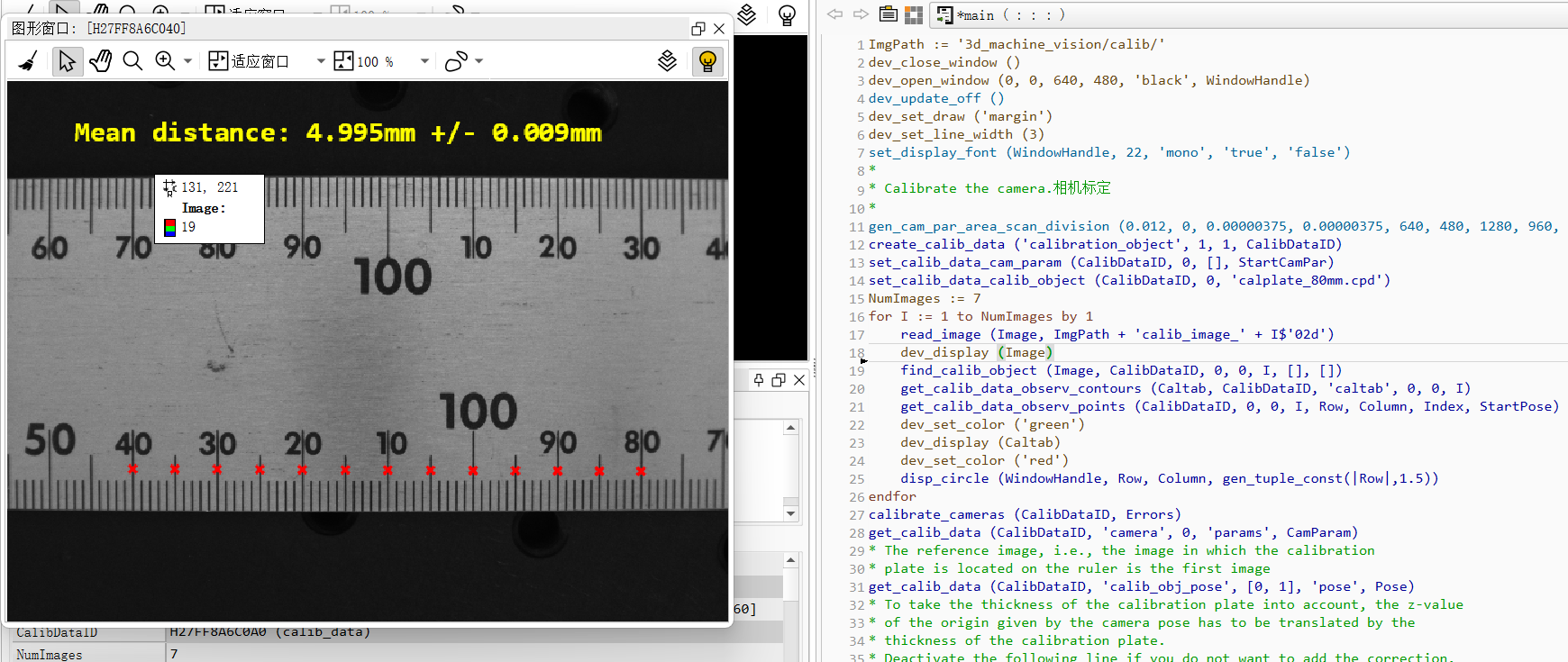
gen_cam_par_area_scan_division ( 0.012 , 0 , 0.00000375 , 0.00000375 , 640 , 480 , 1280 , 960 , StartCamPar)
create_calib_data ( 'calibration_object' , 1 , 1 , CalibDataID)
set_calib_data_cam_param ( CalibDataID, 0 , [ ] , StartCamPar)
set_calib_data_calib_object ( CalibDataID, 0 , 'calplate_80mm.cpd' )
NumImages : = 7
for I : = 1 to NumImages by 1 read_image ( Image, ImgPath + 'calib_image_' + I$'02d' ) dev_display ( Image) find_calib_object ( Image, CalibDataID, 0 , 0 , I, [ ] , [ ] ) get_calib_data_observ_contours ( Caltab, CalibDataID, 'caltab' , 0 , 0 , I) get_calib_data_observ_points ( CalibDataID, 0 , 0 , I, Row, Column, Index, StartPose) dev_set_color ( 'green' ) dev_display ( Caltab) dev_set_color ( 'red' ) disp_circle ( WindowHandle, Row, Column, gen_tuple_const ( | Row| , 1.5 ) )
endfor
calibrate_cameras ( CalibDataID, Errors)
get_calib_data ( CalibDataID, 'camera' , 0 , 'params' , CamParam)
* The reference image, i. e. , the image in which the calibration
* plate is located on the ruler is the first image
get_calib_data ( CalibDataID, 'calib_obj_pose' , [ 0 , 1 ] , 'pose' , Pose)
* To take the thickness of the calibration plate into account, the z- value
* of the origin given by the camera pose has to be translated by the
* thickness of the calibration plate.
* Deactivate the following line if you do not want to add the correction.
set_origin_pose ( Pose, 0 , 0 , 0.002 , Pose)
* measure the distance between the pitch lines
read_image ( Image, ImgPath + 'ruler' )
dev_display ( Image)
* 产生一个测量矩形
gen_measure_rectangle2 ( 690 , 680 , rad ( - 0.25 ) , 480 , 8 , 1280 , 960 , 'bilinear' , MeasureHandle) measure_pairs ( Image, MeasureHandle, 0.5 , 5 , 'all' , 'all' , RowEdgeFirst, ColumnEdgeFirst, AmplitudeFirst, RowEdgeSecond, ColumnEdgeSecond, AmplitudeSecond, IntraDistance, InterDistance)
Row : = ( RowEdgeFirst + RowEdgeSecond) / 2.0
Col : = ( ColumnEdgeFirst + ColumnEdgeSecond) / 2.0
disp_cross ( WindowHandle, Row, Col, 20 , rad ( 45 ) )
* 坐标系转换
image_points_to_world_plane ( CamParam, Pose, Row, Col, 'mm' , X1, Y1)
* 计算两个点的距离
distance_pp ( X1[ 0 : 11 ] , Y1[ 0 : 11 ] , X1[ 1 : 12 ] , Y1[ 1 : 12 ] , Distance)
tuple_mean ( Distance, MeanDistance)
tuple_deviation ( Distance, DeviationDistance)
disp_message ( WindowHandle, 'Mean distance: ' + MeanDistance$'.3f' + 'mm +/- ' + DeviationDistance$'.3f' + 'mm' , 'window' , 30 , 60 , 'yellow' , 'false' )