20250517让NanoPi NEO core开发板在Ubuntu core16.04.2下支持TF卡的热插拔
20250517让NanoPi NEO core开发板在Ubuntu core16.04.2下支持TF卡的热插拔
2025/5/17 17:52
缘起:实测NanoPi NEO core开发板上电之后,后插入的TF卡不认/不支持热插拔。
Ubuntu core16.04.2
Ubuntu core20.04
Ubuntu core16.04.3
用NanoPi NEO core开发板 接入4G模块EC200A-CN。
有一个移远提供的上网应用程序:quectel-CM需要拷贝到Ubuntu core系统中。
【还没有来得及集成到IMG固件/系统中】
不想使用RJ45以太网线了!
插上网线是可以通过DHCP自动分配局域网的IP地址。
然后通过ssh/scp、samba就可以拷贝文件进去了!
如果H3通过EMMC启动,上电之后再插入 有程序的TF卡 拷贝文件。
系统启动完成之后就不会/不识别你所插入的TF卡。
必须上电之前插入?
linux内核是支持 热插拔的呀?
感觉是你们/友善之臂没有做好!
现在使用的ubuntu core 20.04测试的。
记忆中ubuntu core 16.04.2/Ubuntu22.04.2都有这个问题的。
貌似Android系统是有一个daemon应用程序,一秒钟扫描一次是否有TF卡插入。
在H3上做一个这种daemon应用程序很简单的!
我们只提供底层软件和基础的系统,因为不同客户需求是不同的,
至于自动挂载,按需自行配置udev规则即可,或者有些systemd服务可以达到同样的目的,
怀疑linux内核没有识别SD插入,可以打印一下dmesg信息看看。
【贵司邮件服务器异常,从2025-05-10开始不接受带附件的E-MAIL了!^_无法 发送附加了】
NanoPi NEO core开发板在ubuntu core22.04.3下
查看/比对了一下插入前后的dmesg,发现/确认你们提供的kernel:linux内核没有识别SD插入。
由于对SD/TF卡的热插拔检测是很基本的功能,我希望贵司最好能够加入这个功能。
2015年,我就开始做全志R16的FAE,和A33/H3同一个级别的SOC。
记得当时全志R16在Android4.4.2/tina下都可以支持SD/TF卡的热插拔的。
至少可以提供一下方向,让我知道该如何加入?
参考资料:
https://blog.51cto.com/u_16099268/13875998
Android TF卡热拔插
https://blog.csdn.net/fun_tion/article/details/142613803
嵌入式Linux系统TF卡热插拔检测问题
是否是因为没有配置SDHCI_EXT_CD检测引脚?或者没有配置正确呢?
root@NanoPi-NEO-Core:/# cat /sys/kernel/debug/gpio
gpiochip0: GPIOs 0-223, parent: platform/1c20800.pinctrl, 1c20800.pinctrl:
gpio-10 ( |status_led ) out lo
gpio-204 ( |usb0_id_det ) in hi IRQ
gpiochip1: GPIOs 352-383, parent: platform/1f02c00.pinctrl, 1f02c00.pinctrl:
gpio-354 ( |usb0-vbus ) out lo
gpio-355 ( |k1 ) in hi IRQ
gpio-358 ( |? ) out lo
gpio-360 ( |vcc1v2 ) out hi
gpio-361 ( |vcc-dram ) out hi
gpio-362 ( |LED2 ) out hi
root@NanoPi-NEO-Core:/#
非常抱歉,由于一些历史原因,我们提供的系统默认禁用了 TF卡插拔检测。
用户可以参考下面这个 commit 的内容,自行使能该特性:
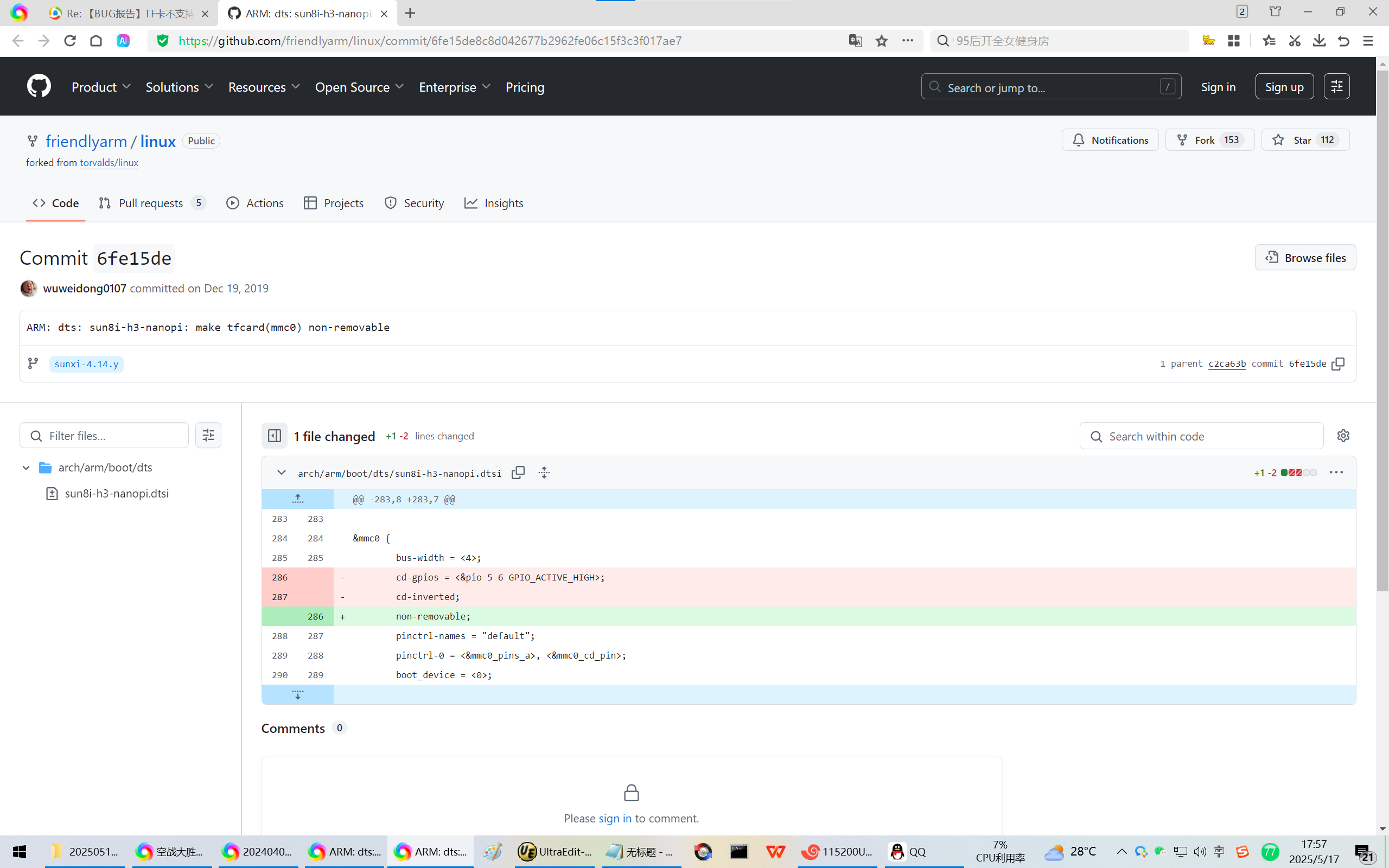
https://github.com/friendlyarm/linux/commit/6fe15de8c8d042677b2962fe06c15f3c3f017ae7
https://github.com/friendlyarm/linux/commit/6fe15de8c8d042677b2962fe06c15f3c3f017ae7
1 file changed
+1
-2
lines changed
Search within code
?arch/arm/boot/dts/sun8i-h3-nanopi.dtsi
+1
-2
Original file line number Diff line number Diff line change
@@ -283,8 +283,7 @@
&mmc0 {
bus-width = <4>;
cd-gpios = <&pio 5 6 GPIO_ACTIVE_HIGH>;
cd-inverted;
non-removable;
pinctrl-names = "default";
pinctrl-0 = <&mmc0_pins_a>, <&mmc0_cd_pin>;
boot_device = <0>;
Z:\sd-fuse_h3\kernel\arch\arm\boot\dts\sun8i-h3-nanopi-neo-core.dts
Z:\sd-fuse_h3\kernel\arch\arm\boot\dts\sun8i-h3-nanopi - 副本.dtsi
&mmc0 {
bus-width = <4>;
non-removable;
pinctrl-names = "default";
pinctrl-0 = <&mmc0_pins_a>, <&mmc0_cd_pin>;
boot_device = <0>;
status = "okay";
vmmc-supply = <®_vcc3v3>;
};
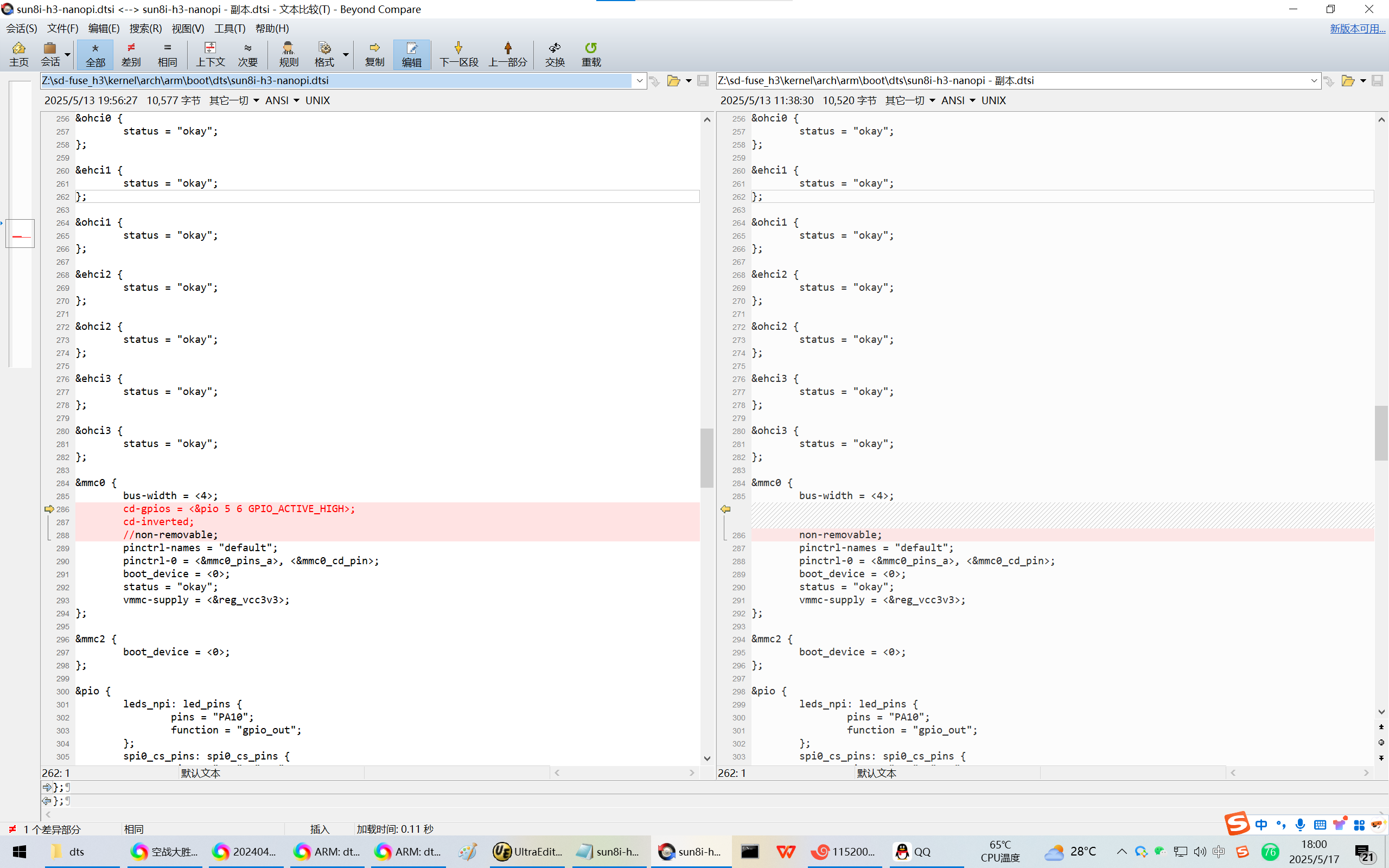
修改成为:
Z:\sd-fuse_h3\kernel\arch\arm\boot\dts\sun8i-h3-nanopi.dtsi
&mmc0 {
bus-width = <4>;
cd-gpios = <&pio 5 6 GPIO_ACTIVE_HIGH>;
cd-inverted;
//non-removable;
pinctrl-names = "default";
pinctrl-0 = <&mmc0_pins_a>, <&mmc0_cd_pin>;
boot_device = <0>;
status = "okay";
vmmc-supply = <®_vcc3v3>;
};
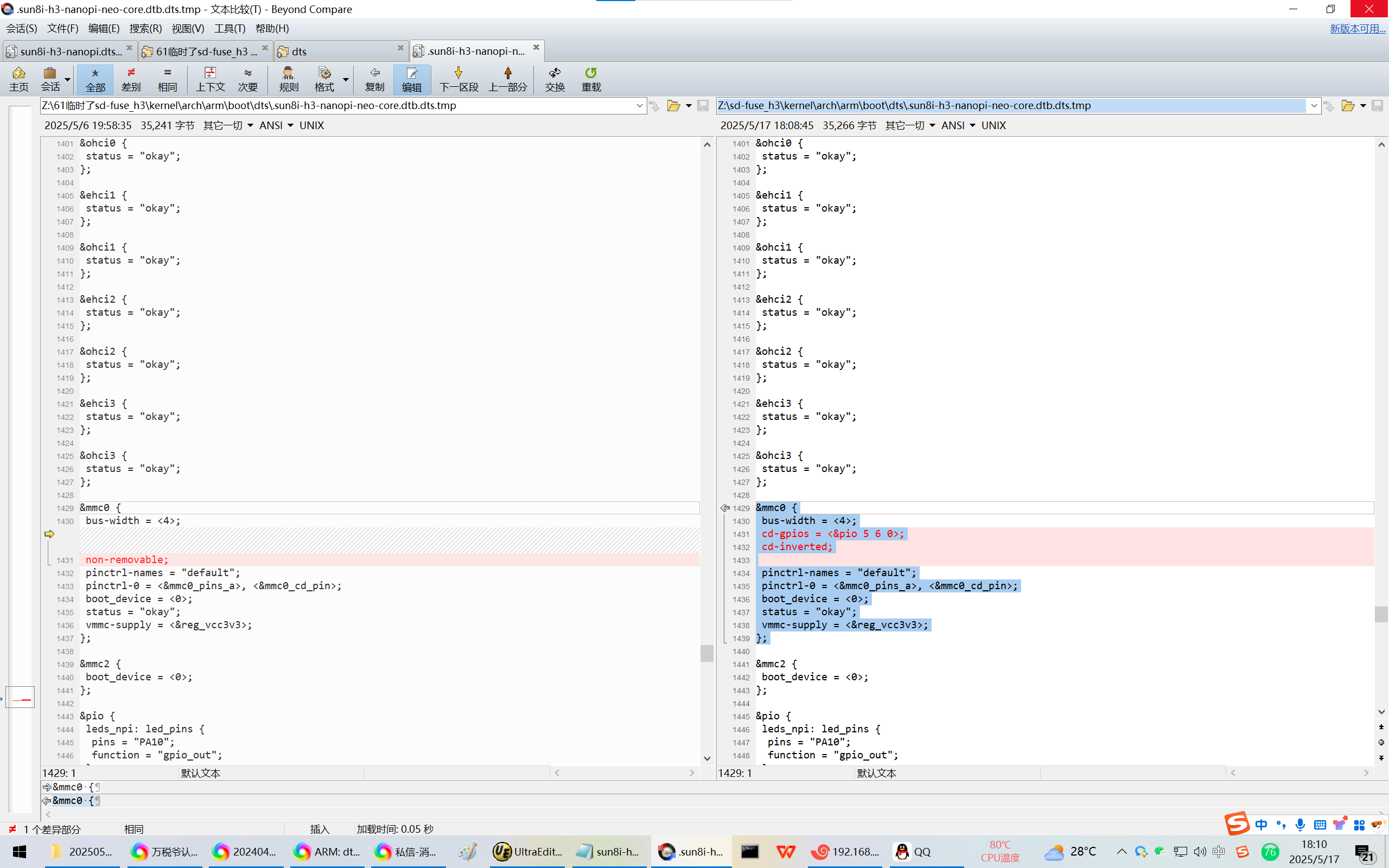
确认DTS的编译结果:
Z:\61临时了sd-fuse_h3\kernel\arch\arm\boot\dts\.sun8i-h3-nanopi-neo-core.dtb.dts.tmp
&mmc0 {
bus-width = <4>;
non-removable;
pinctrl-names = "default";
pinctrl-0 = <&mmc0_pins_a>, <&mmc0_cd_pin>;
boot_device = <0>;
status = "okay";
vmmc-supply = <®_vcc3v3>;
};
Z:\sd-fuse_h3\kernel\arch\arm\boot\dts\.sun8i-h3-nanopi-neo-core.dtb.dts.tmp
&mmc0 {
bus-width = <4>;
cd-gpios = <&pio 5 6 0>;
cd-inverted;
pinctrl-names = "default";
pinctrl-0 = <&mmc0_pins_a>, <&mmc0_cd_pin>;
boot_device = <0>;
status = "okay";
vmmc-supply = <®_vcc3v3>;
};
更新zImage和sun8i-h3-nanopi-neo-core.dtb文件,打包boot.img之后:更新:
Z:\sd-fuse_h3\kernel\arch\arm\boot\dts\sun8i-h3-nanopi-neo-core.dtb
Z:\sd-fuse_h3\BOOT\sun8i-h3-nanopi-neo-core.dtb
F:\zImage
H:\friendlycore\boot.img
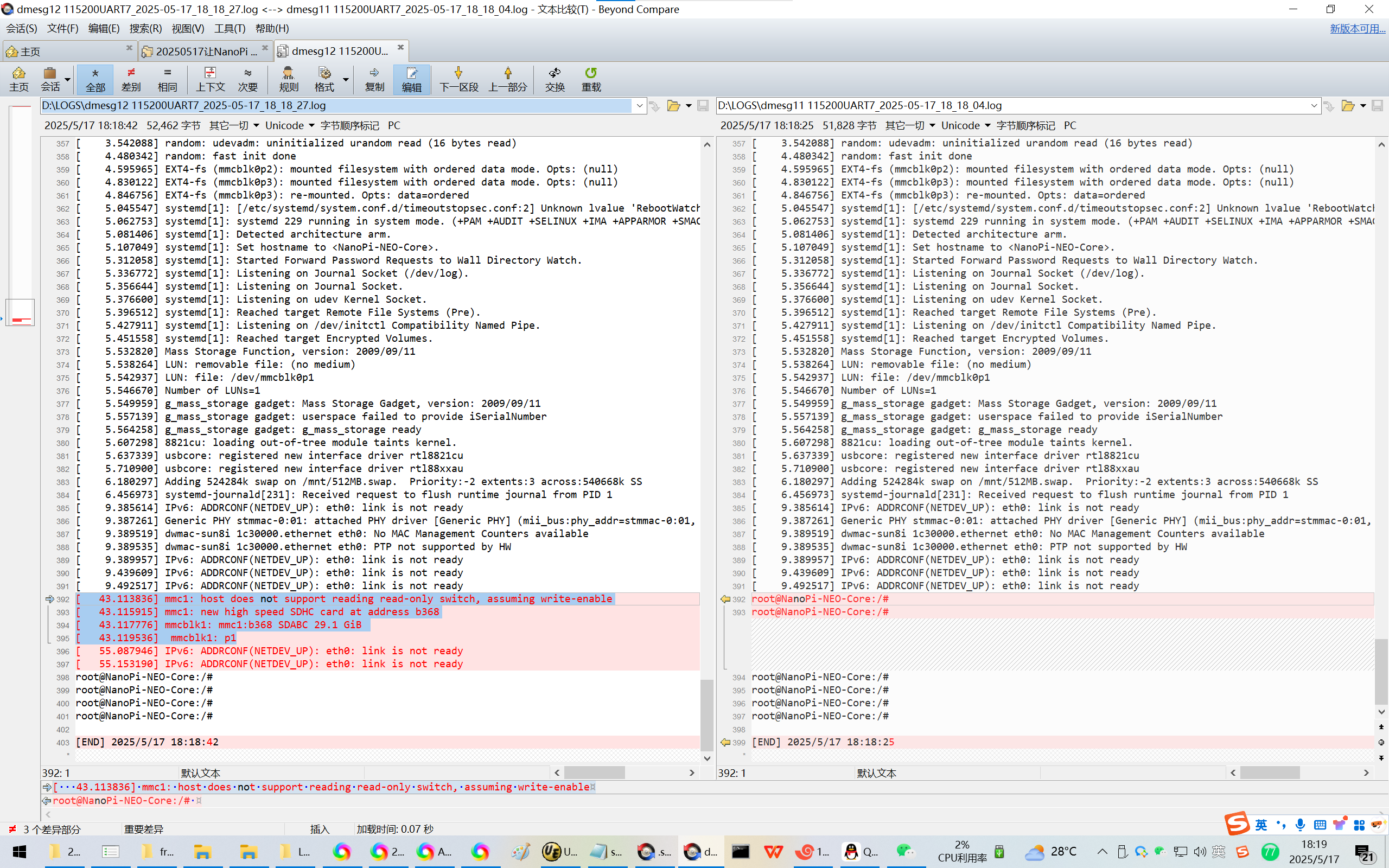
LOG/dmesg比对:
[ 9.389957] IPv6: ADDRCONF(NETDEV_UP): eth0: link is not ready
[ 9.439609] IPv6: ADDRCONF(NETDEV_UP): eth0: link is not ready
[ 9.492517] IPv6: ADDRCONF(NETDEV_UP): eth0: link is not ready
[ 43.113836] mmc1: host does not support reading read-only switch, assuming write-enable
[ 43.115915] mmc1: new high speed SDHC card at address b368
[ 43.117776] mmcblk1: mmc1:b368 SDABC 29.1 GiB
[ 43.119536] mmcblk1: p1
[ 55.087946] IPv6: ADDRCONF(NETDEV_UP): eth0: link is not ready
[ 55.153190] IPv6: ADDRCONF(NETDEV_UP): eth0: link is not ready
root@NanoPi-NEO-Core:/# dmesg
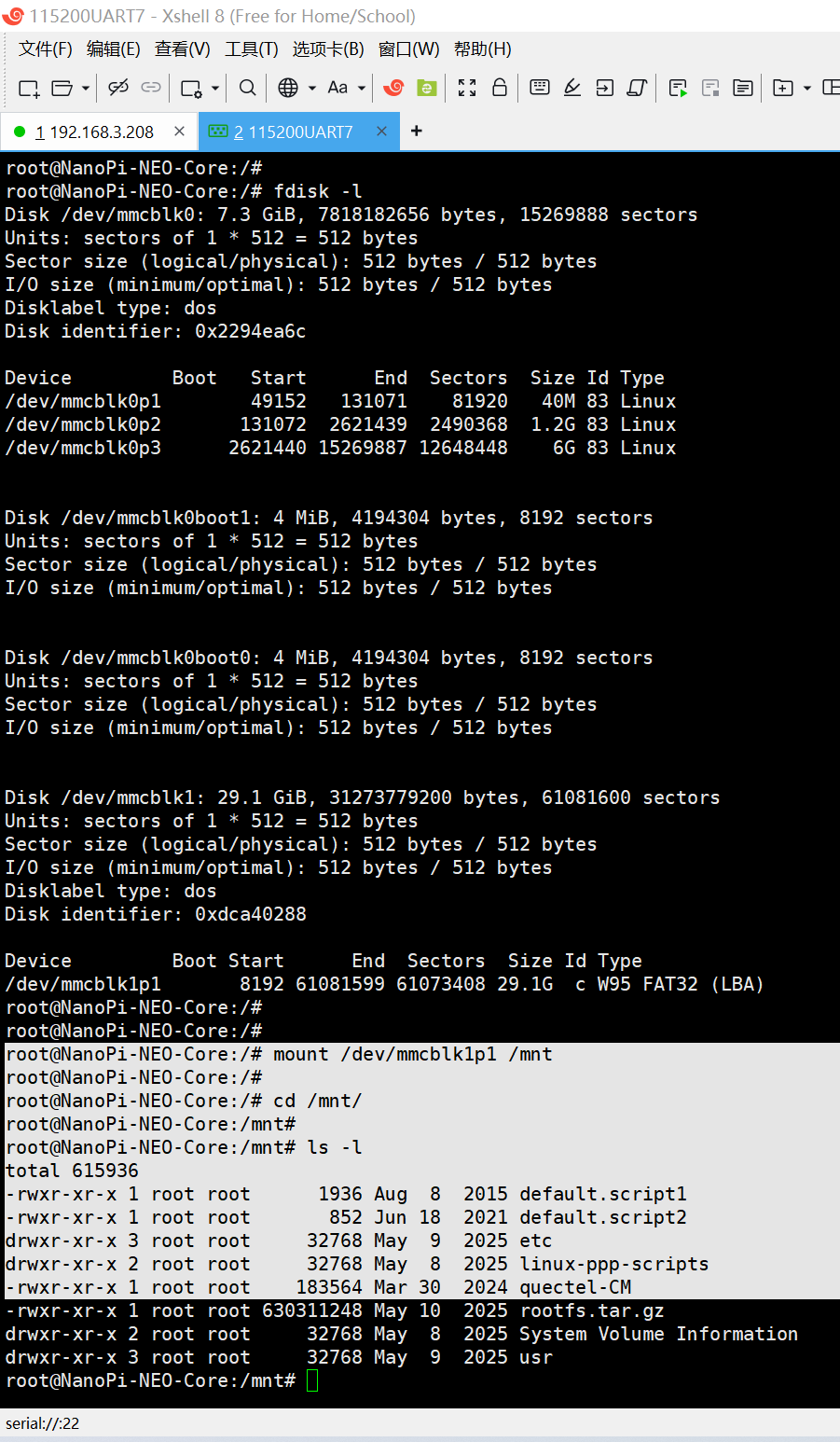
挂载/热插拔TF卡:
root@NanoPi-NEO-Core:/#
root@NanoPi-NEO-Core:/# fdisk -l
Disk /dev/mmcblk0: 7.3 GiB, 7818182656 bytes, 15269888 sectors
Units: sectors of 1 * 512 = 512 bytes
Sector size (logical/physical): 512 bytes / 512 bytes
I/O size (minimum/optimal): 512 bytes / 512 bytes
Disklabel type: dos
Disk identifier: 0x2294ea6c
Device Boot Start End Sectors Size Id Type
/dev/mmcblk0p1 49152 131071 81920 40M 83 Linux
/dev/mmcblk0p2 131072 2621439 2490368 1.2G 83 Linux
/dev/mmcblk0p3 2621440 15269887 12648448 6G 83 Linux
Disk /dev/mmcblk0boot1: 4 MiB, 4194304 bytes, 8192 sectors
Units: sectors of 1 * 512 = 512 bytes
Sector size (logical/physical): 512 bytes / 512 bytes
I/O size (minimum/optimal): 512 bytes / 512 bytes
Disk /dev/mmcblk0boot0: 4 MiB, 4194304 bytes, 8192 sectors
Units: sectors of 1 * 512 = 512 bytes
Sector size (logical/physical): 512 bytes / 512 bytes
I/O size (minimum/optimal): 512 bytes / 512 bytes
Disk /dev/mmcblk1: 29.1 GiB, 31273779200 bytes, 61081600 sectors
Units: sectors of 1 * 512 = 512 bytes
Sector size (logical/physical): 512 bytes / 512 bytes
I/O size (minimum/optimal): 512 bytes / 512 bytes
Disklabel type: dos
Disk identifier: 0xdca40288
Device Boot Start End Sectors Size Id Type
/dev/mmcblk1p1 8192 61081599 61073408 29.1G c W95 FAT32 (LBA)
root@NanoPi-NEO-Core:/#
root@NanoPi-NEO-Core:/#
root@NanoPi-NEO-Core:/# mount /dev/mmcblk1p1 /mnt
root@NanoPi-NEO-Core:/#
root@NanoPi-NEO-Core:/# cd /mnt/
root@NanoPi-NEO-Core:/mnt#
root@NanoPi-NEO-Core:/mnt# ls -l
total 615936
-rwxr-xr-x 1 root root 1936 Aug 8 2015 default.script1
-rwxr-xr-x 1 root root 852 Jun 18 2021 default.script2
drwxr-xr-x 3 root root 32768 May 9 2025 etc
drwxr-xr-x 2 root root 32768 May 8 2025 linux-ppp-scripts
-rwxr-xr-x 1 root root 183564 Mar 30 2024 quectel-CM
-rwxr-xr-x 1 root root 630311248 May 10 2025 rootfs.tar.gz
drwxr-xr-x 2 root root 32768 May 8 2025 System Volume Information
drwxr-xr-x 3 root root 32768 May 9 2025 usr
root@NanoPi-NEO-Core:/mnt#