在微创手术中使用Kinova轻型机械臂进行多视图图像采集和3D重建
在微创手术中,Kinova轻型机械臂通过其灵活的运动控制和高精度的操作能力,支持多视图图像采集和3D重建。这种技术通过机械臂搭载的光学系统实现精准的多角度扫描,为医疗团队提供清晰且详细的解剖结构模型。其核心在于结合先进的传感器配置与重建算法,有效提升手术导航的准确性。通过此类创新,医生能够更好地规划手术路径,同时减少对患者组织的损伤,从而加速术后恢复过程。
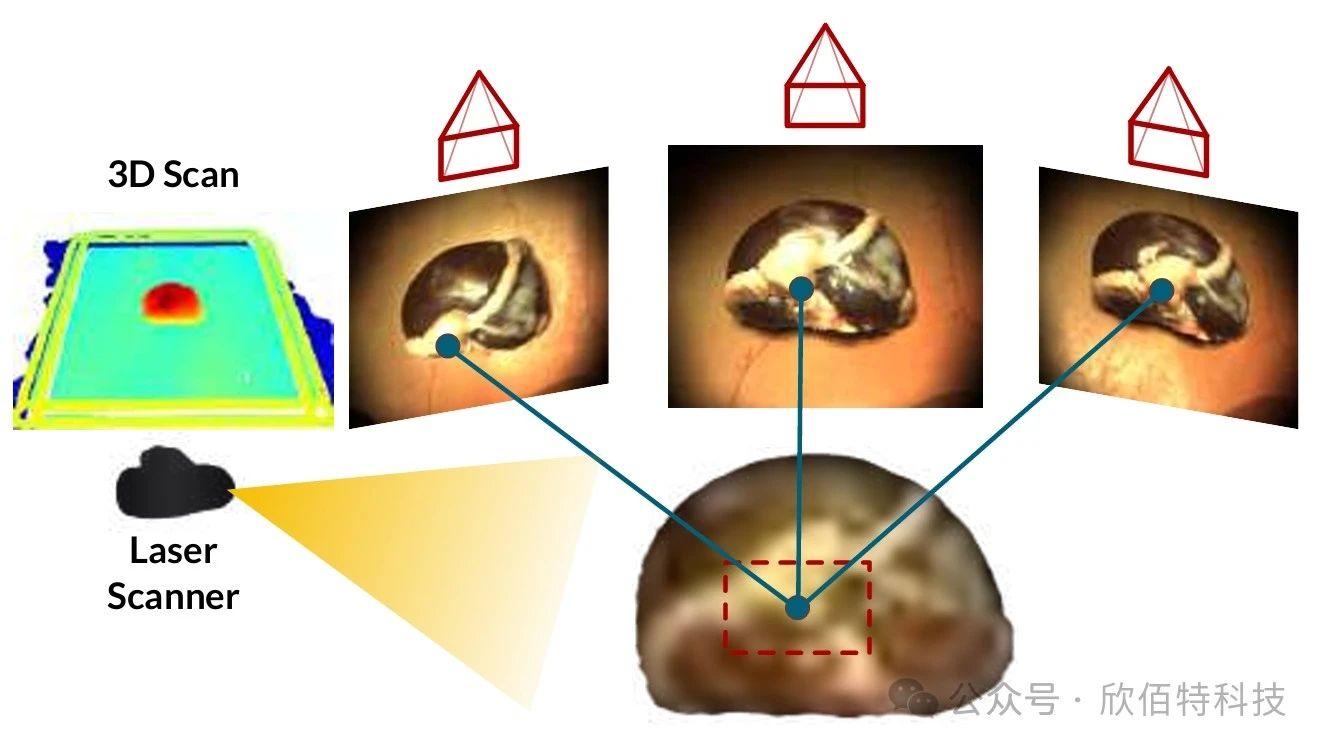
图1. 本研究利用机械臂平台采集的多视图图像进行三维重建。使用激光扫描仪获取用于对比的真实数据。
Kinova轻型机械臂技术特点:

高精度控制系统:Kinova轻型机械臂能精准定位,在复杂手术环境中保障安全性,降低对周围组织的损伤风险,同时支持实时反馈,快速响应环境变化,为医生提供稳定操作体验。
模块化设计:Kinova轻型机械臂采用模块化设计,可根据需求定制或更换模块,适应不同医疗场景,如在微创手术中搭载不同传感器或工具。该设计便于维护和升级,降低长期使用成本,使其成为医疗领域的多功能选择。
Gen3系列医疗适配性:Gen3系列具有7自由度,运动范围大,能覆盖手术区域多角度。支持多种通信协议,易与其他医疗设备集成。轻量化、紧凑设计便于在狭小手术空间操作,结合先进3D重建技术,为医生提供清晰解剖视图,提高手术精确性和效率。

多视图图像采集:为确保数据质量及3D重建精度,Kinova轻型机械臂常搭载高分辨率RGB摄像头和光学系统,部分场景还会配置深度传感器或激光扫描仪。这些传感器一般安装在机械臂末端执行器上,可灵活调整视角,采集完整解剖结构数据。
Kinova轻型机械臂的7自由度设计使其在复杂手术环境中灵活移动,实现多角度覆盖。其运动规划算法可实时计算机械臂路径,提升有限空间内的运行效率。为实现精准控制,机械臂采用逆运动学算法,依目标位置和姿态算出各关节角度。控制系统还支持远程中心运动(RCM)模式,对微创手术很重要,可确保机械臂经手术切口时稳定,减少对周围组织的损伤。
3D重建技术的应用
图像数据处理算法
在3D重建中,图像数据处理很重要。系统可通过先进算法,从多视图图像里提取特征点并匹配。常用的有结构化运动(SfM)和同时定位与建图(SLAM)算法,它们能分析图像特征点,算出相机运动轨迹和场景三维结构。
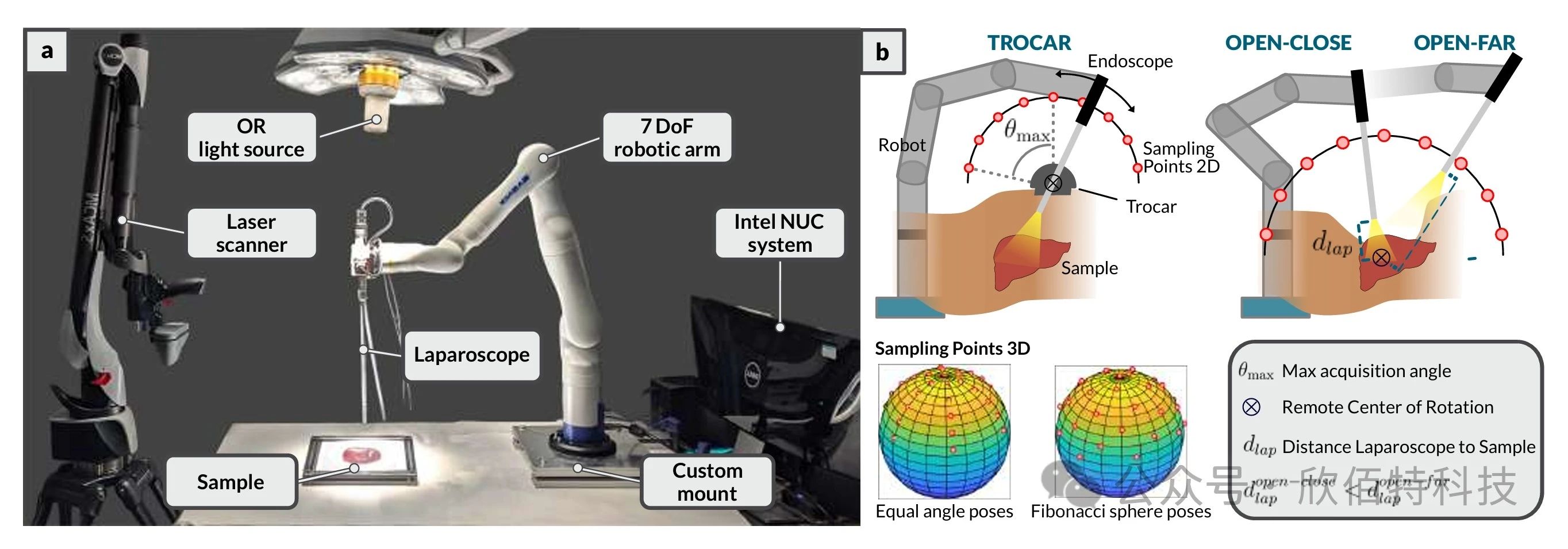
图 2. a) 标注图展示了机器人平台。机器人通过定制支架固定在桌子上。腹腔镜光学系统通过 3D 打印和激光切割部件连接到机器人上。所有轨迹控制和数据捕获均由 Intel NUC 处理。
特征点提取是第一步,SIFT 和 ORB 算法能在不同光照下识别图像关键点。之后,特征匹配算法对不同视角图像配对,保障数据连贯。现在,基于深度学习的 ALIKED 和 LightGlue 等方法也被引入,通过学习图像特征全局分布,提升匹配鲁棒性。
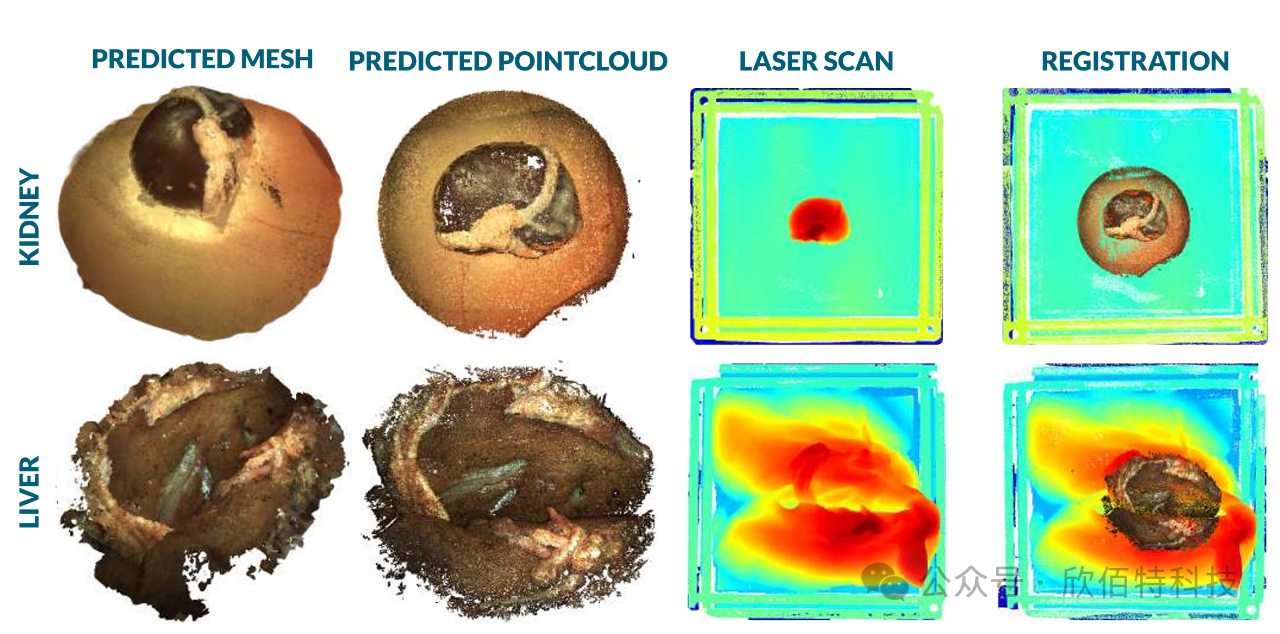
图 4. 使用不同轨迹和照明条件获得的肾脏和肝脏的 3D 重建。对于肾脏(第 1 行),在手术室照明下使用 Open-Far 轨迹捕获数据,并使用 ALIKED-LG 图像匹配器进行处理。肝脏(第 2 行)在腹腔镜照明下使用穿刺器轨迹捕获,并使用 GIM-LG 匹配器进行处理。在这两种情况下,预测的 3D 模型(第 1 列和第 2 列)与真实激光扫描(第 3 列)以及后处理的对齐重建(第 4 列)进行了比较。
最后一步是点云生成,系统把匹配后的特征点投影到三维空间,生成稠密点云模型,为后续3D 重建提供基础数据支持。选择算法时,需结合手术场景复杂程度和计算资源限制,综合考量算法精度和效率。
微创手术技术的发展离不开创新设备的支持。Kinova轻型机械臂通过其精准的多视图图像采集和3D重建能力,为微创手术提供了强大的技术保障。未来,机械臂可以结合实时数据处理技术,实现手术过程中的动态3D建模。这将帮助医生在手术中实时调整操作策略,提升手术的成功率。此外,Kinova机械臂的模块化设计可以支持更多类型的手术工具,为微创手术技术的多样化发展提供可能性。通过不断的技术突破,机械臂将在推动微创手术技术发展中发挥重要作用。
猜你喜欢
BOTA六维力矩传感器如何打通机器人AI力控操作的三层架构?感知-决策-执行全链路揭秘
Hello Robot具身智能移动操作机器人Stretch 3:开源、灵巧、友好
Allegro Hand四指灵巧手全家桶:16自由度全驱下的灵巧性与触觉智能融合
Touch Diver:Weart为XR和机器人遥操作专属设计的触觉反馈动捕手套
Aloha机器人与π0模型:通用性赋能下的零样本学习与灵巧操作
Mentalab无线脑电系统,无线超轻便携,干湿电极兼容,脑机接口~脑科学~认知心理学~睡眠健康等研究随时随地开展。