SOLIDWORKS Simulation接触定义精讲(一)
在使用SOLIDWORKS Simulation做仿真过程中,面对非单实体零件的模拟对象,就必定会涉及到接触问题,接下来我们将针对Simulation中的接触定义做详细介绍。
接触定义
Simulation中定义接触,被称之为“交互”,以当前最高版本2024为例,我们看一下交互的类别:

其在计算过程中的优先级为“本地交互”>真正“零部件交互”>“全局交互”,接下来我们将逐一详细解读这些概念。
01 全局交互
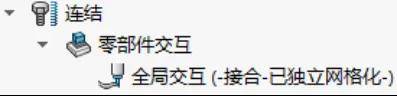
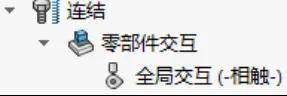
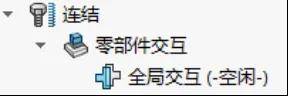
当我们为一个多实体零件或装配体建立静态分析算例时,在算例的特征树上我们会看到以下连接信息之一。
默认生成哪种交互类型,由Simulation的选项决定,该选项位于主菜单“Simulation->选项->默认选项->交互”。
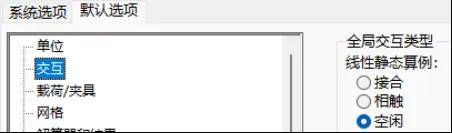
“接合”实体的行为方式就像是被焊接一样,两者被视为一体。
“相触”实体的行为方式为可以被相互压紧或分离。
“空闲”实体的行为方式就像对方不存在,各自独立。
“全局交互”用于定义算例中所有实体/零件之间的默认交互关系,可以根据当前模型中零件部间哪种类型占主导来进行调整,从而减少整体定义交互条件的复杂性。
例如算例中零件间有10对面,其中8对为相触,2对为接合,那全局交互定义为相触效率更高,因为此时只需要手动定义2对接合即可。
02
零部件交互
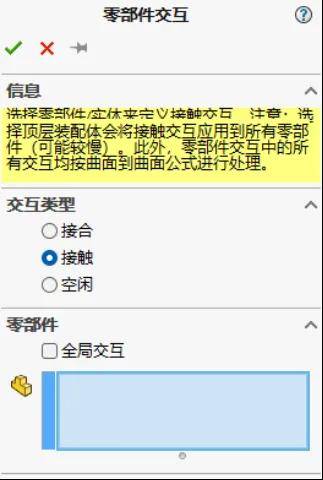
当全局交互已经定义,但部分零部件交互类型与全局交互不同且零部件间该类型交互面比较多时,可以使用“零部件交互”来定义。
该交互类型同样支持“接合”、“接触”和“空闲”三种定义类型,该交互类型定义时,可以直接选取需要定义的零件/实体来定义。
例如装配体中有10个零件,全局交互定义为“接合”其中两个零件需要变更为“接触”时,可以直接通过“零部件交互”来将这两个零件交互类型定义为“接触”,从而快速完成其定义。
本次我们重点探讨了SOLIDWORKS Simulation中“全局交互”与“零部件交互”的概念,它们在仿真分析中扮演着关键角色,下一期我们将续谈“本地交互”,敬请期待,以完整了解Simulation中的接触定义。