面向SDV的在环测试深度解析——仿真中间件SIL KIT应用篇
1.引言
在汽车行业向软件定义汽车(SDV)转型的过程中,传统硬件在环(HIL)测试方案因难以适应新的技术架构与需求,其局限性日益凸显。传统HIL对硬件依赖性强,扩展性差,更换ECU或传感器需额外硬件支持,成本高且周期长、难以协调多供应商的异构模型,通信协议之间转换复杂、对实时场景支持有限(如μs级响应),且难以保证分布式系统的全局时间同步。而以上这些问题痛点通过软件在环(SIL),依托仿真中间件都可以迎刃而解。所谓“在环”指的是将待测软硬件置于一个模拟的闭环系统中进行测试和验证,好像被“圈”在一个由输入、处理和输出构成的环路中,不断地与模拟环境进行交互,以验证各种情况下的功能和性能是否正确和稳定。而软件在环,就是这基础上将待测试的嵌入式软件从硬件环境中抽象出来,在完全虚拟环境中进行运行和测试。
2.仿真中间件SIL KIT的应用生态
SIL仿真中间件通过虚拟化、标准化通信和分布式架构,可有效解决传统HIL在扩展性、复杂性和成本方面的局限性。尤其在新型电子架构和自动驾驶开发中,逐渐成为不可替代的测试验证手段。借助仿真中间件SIL KIT可以实现以下功能:
- 通过SIL KIT可创建虚拟ECU节点,无需物理硬件即可模拟各类控制器功能
- 支持虚拟 CAN、LIN 和以太网
- 提供标准化通信层,如SOME/IP,兼容多种工具链
- 提供全局仿真时钟(精度可达±100μs),支持确定性调度
- SILKIT可优化大数据传输(如激光雷达点云)
SIL KIT的设计目标之一是实现轻松连接不同的工具,并在算法开发的初期阶段进行功能验证。SIL KIT提供抽象通信服务、虚拟车辆网络、虚拟时间同步和生命周期管理服务。可与虚拟以太网和 CAN 网络、Linux 虚拟输入 / 输出设备、功能模型接口(FMI)标准实现互操作,并支持流行的系统仿真器 QEMU。目前越来越多的第三方软件工具支持SIL KIT。这种灵活性与高性能相结合,使 SIL Kit 成为软件定义汽车(SDV)架构下 SIL 测试的完美基础。
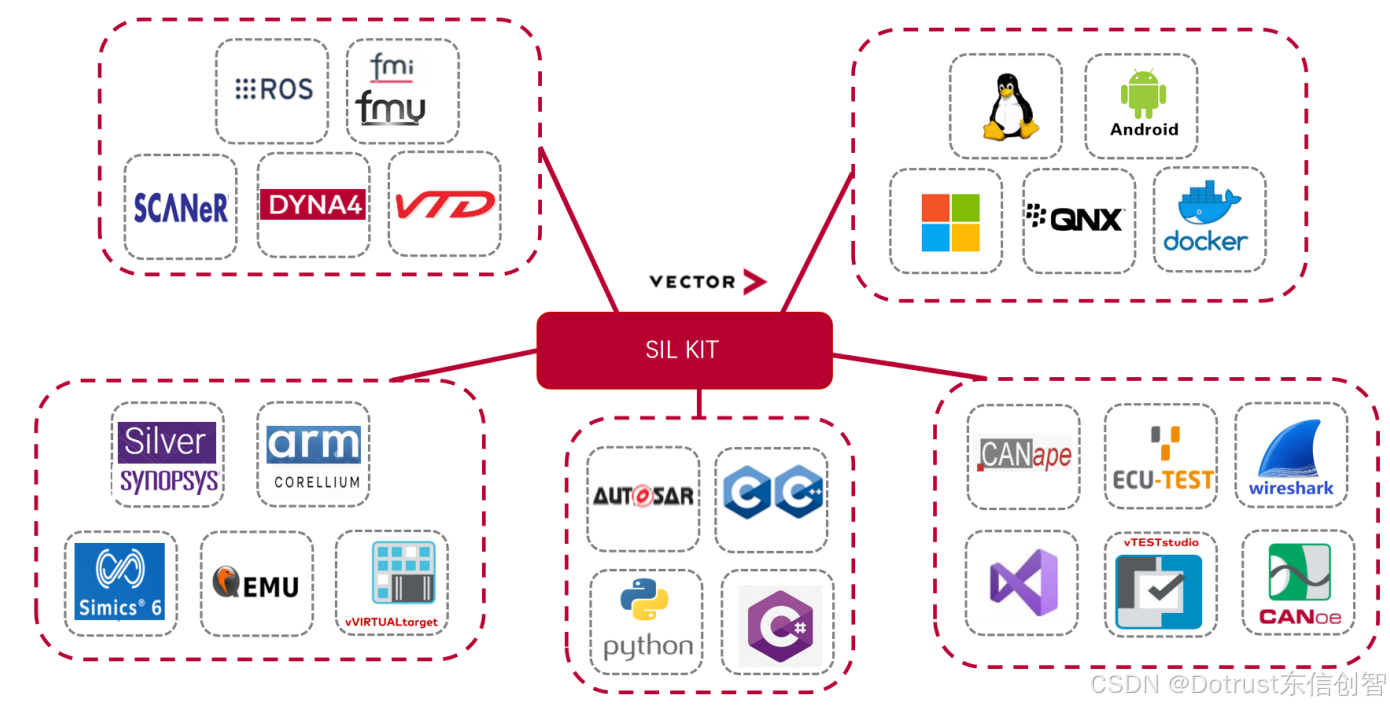
图 1 SIL KIT生态图
2.1 FMU导入器
SIL KIT可以通过FMI标准接口将FMU作为仿真的一个节点进行访问,通过YAML配置文件进行FMU和SIL KIT仿真之间的数据和时间同步设置。SIL KIT提供了Synchronized时间同步模式,使得FMU通过SIL KIT的虚拟时间同步与其他SIL KIT参与者同步。可确保在处理下一个仿真步骤之前,FMU接收到来自虚拟时间中先前时间点的所有数据,并立即执行 FMU 的仿真步骤。
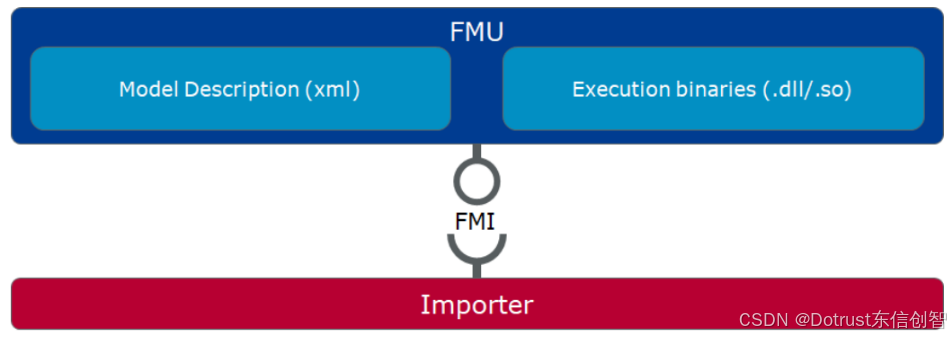
图 2 SIL KIT与FMU集成
多个FMU之间数据的mapping可以通过配置VariableMapping来快速实现在序列化数据之前将数据进行交换和共享以及类型转化。 
图 3 多个FMU之间的数据mapping
2.2 SIL KIT 网络模拟器
SIL KIT 网络模拟器可在网络层面实现通信行为模拟。它支持 CAN、CAN FD、CAN XL、LIN、FlexRay 和以太网,并将特定总线行为集成到 SIL Kit 仿真环境中。
- 可模拟带宽和网络延迟等基本参数
- 可确保准确模拟特定总线行为,如 CAN 网络中的仲裁或 FlexRay 集群中的调度
- 由网络模拟器赋能的 SIL Kit 仿真能够进行更精细的分析,并使仿真结果更具实际意义
- 能在早期阶段评估网络设计,包含在过载条件下
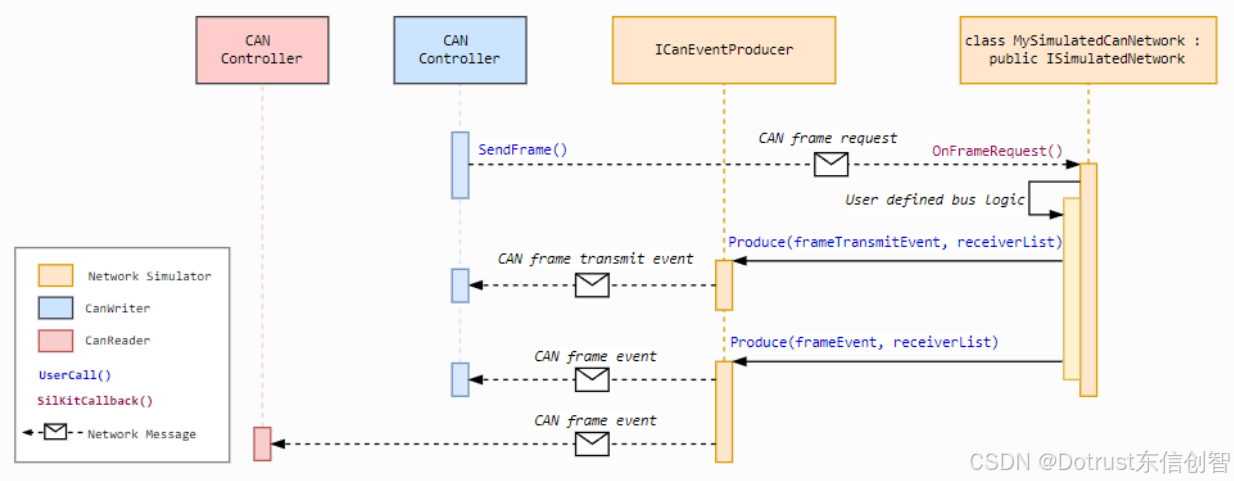
图 4 网络模拟阶段图
2.3 SIL KIT 监测器
SIL KIT检测器是用来收集、存储并展示来自SIL KIT系统的信息。它是SIL KIT库的多功能扩展,包含数据库后端和轻量级 Web 客户端。通过其Web界面,用户可以评估已结束的仿真,并监控正在运行的仿真的实时视图,有助于对仿真进行详细分析,提供全面的统计数据,并帮助识别配置错误和系统异常行为。

图 5监测器界面
3.仿真中间件SILKIT示例
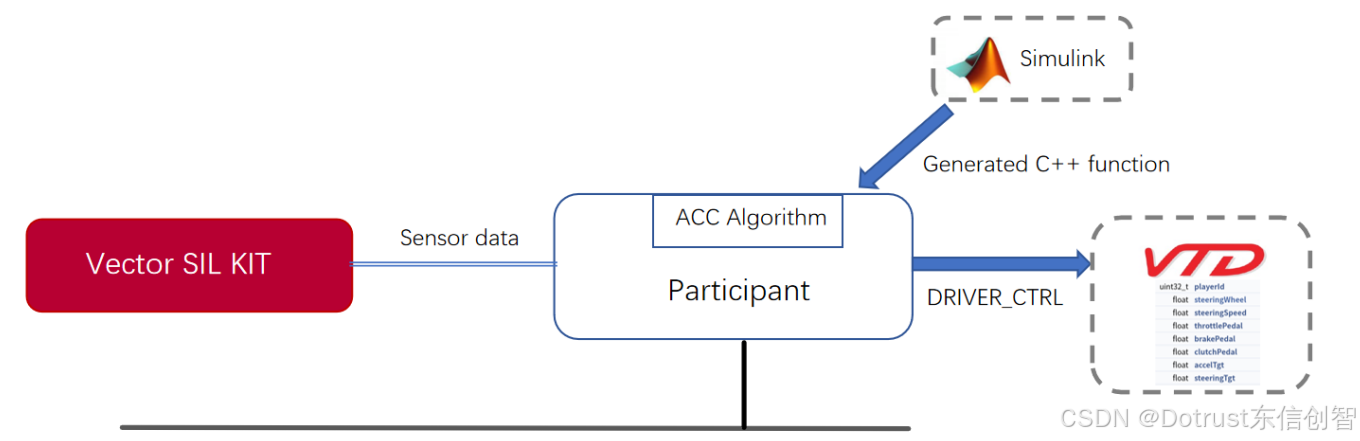
综上所述SIL KIT很适合用于自动驾驶算法测试,接下来我们将以自动驾驶ACC功能为例,了解SIL KIT是如何将基于VTD的毫米波雷达数据以CANFD的形式、摄像头数据以以太网的形式与ACC算法相连接形成闭环,并触发ACC功能的。
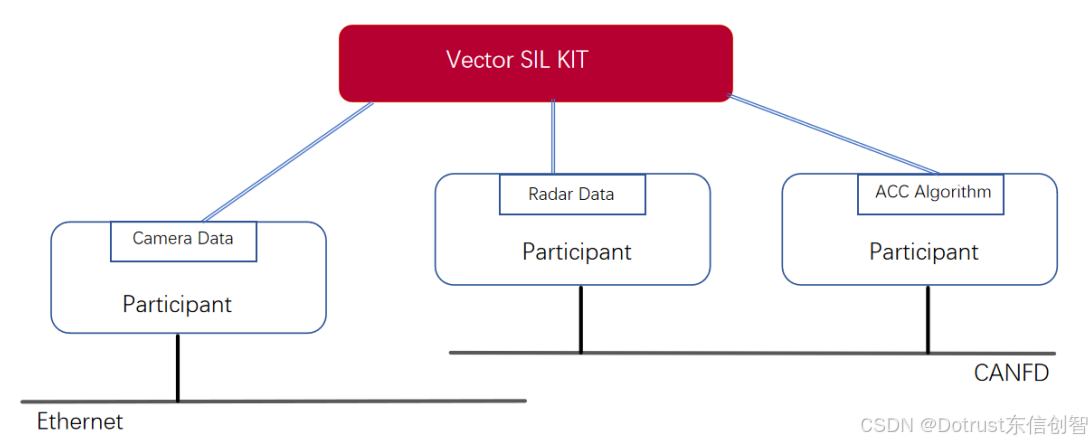
图 6 ACC Demo数据流
3.1 CAN FD的模拟
SIL KIT经过二次开发支持导入并解析DBC文件,可根据信号长度、初始值、Offset、Factor、Layout等构建CAN或CAN FD报文,以原始数据形式发出或对接收到的Message进行解析。如图 7为原始DBC文件及图 8解析后的DBC文件。
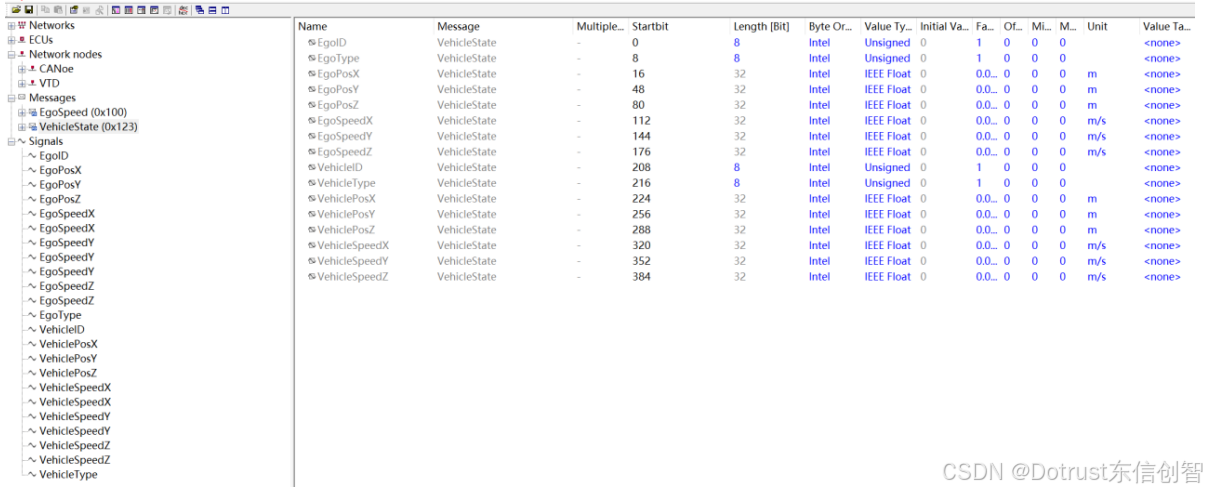

基于SIL KIT源码编写CanWriter、CanReader程序,其中CanWriter建立新线程用于读取RDB_OBJECT_STATE_t信息,通过vehicle_state_canfd_vehicle_state_pack函数将传感器数据打包成Message,随后通过SendFrame函数发布信息到SilKit-Can总线上。
启动CanWriter、CanReader程序后,在CANoe端激活SIL KIT,并在CAN节点中添加对应DBC文件,在CanWriter、CanReader程序、CANoe Trace中可以观测到SIL KIT总线上发布的Message,如图 9、图 10所示。
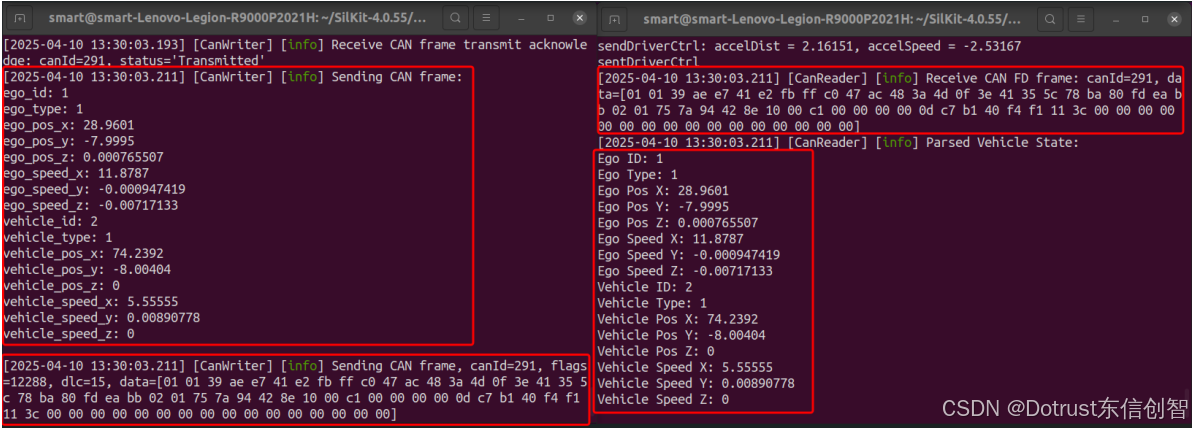
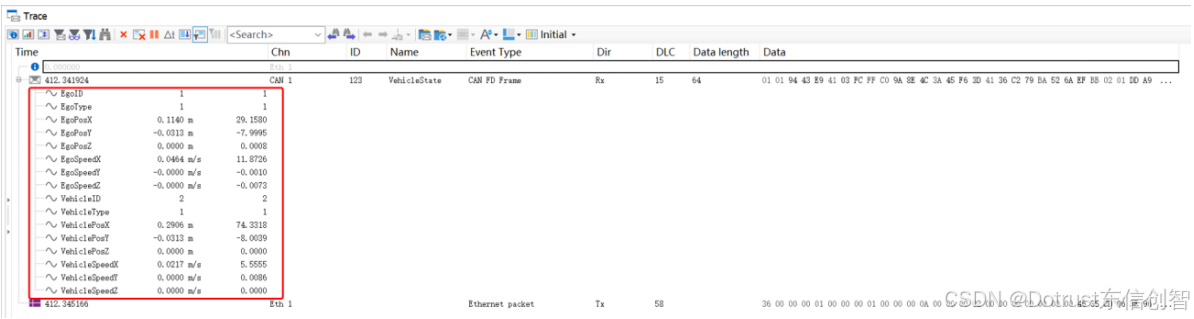
图 10 CANoe Trace CAN报文
3.2 以太网的模拟
在VTD中配置传感器,同时基于SIL KIT源码编写 EthernetWriter、EthernetReader程序,在EthernetWriter中,利用SerializeSensorObjectMsg函数将传感器数据序列化至payload,同时利用SendFrame函数将payload中的传感器数据发布至SilKit-Ethernet总线上。对源码进行编译前确认CMakeLists.txt中确认已包含所需头文件的路径或源文件,如RDBHandler.cc、RDBHandler.hh等。
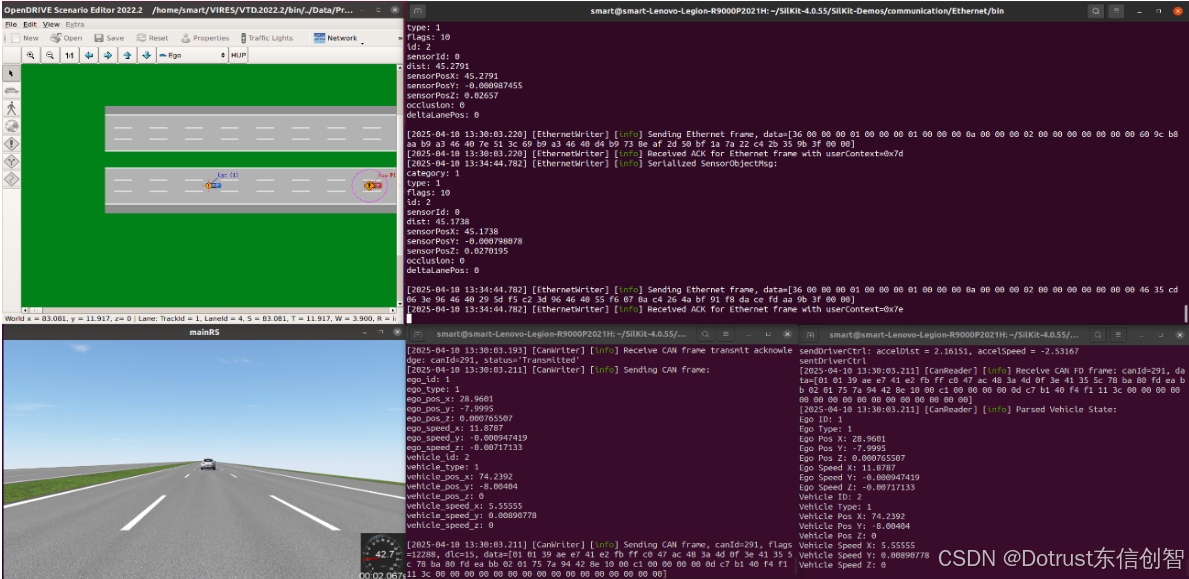
启动程序后,在EthernetWriter、EthernetReader程序、CANoe Trace窗口可监控到以太网数据,如图 11、图 12、图 13所示。
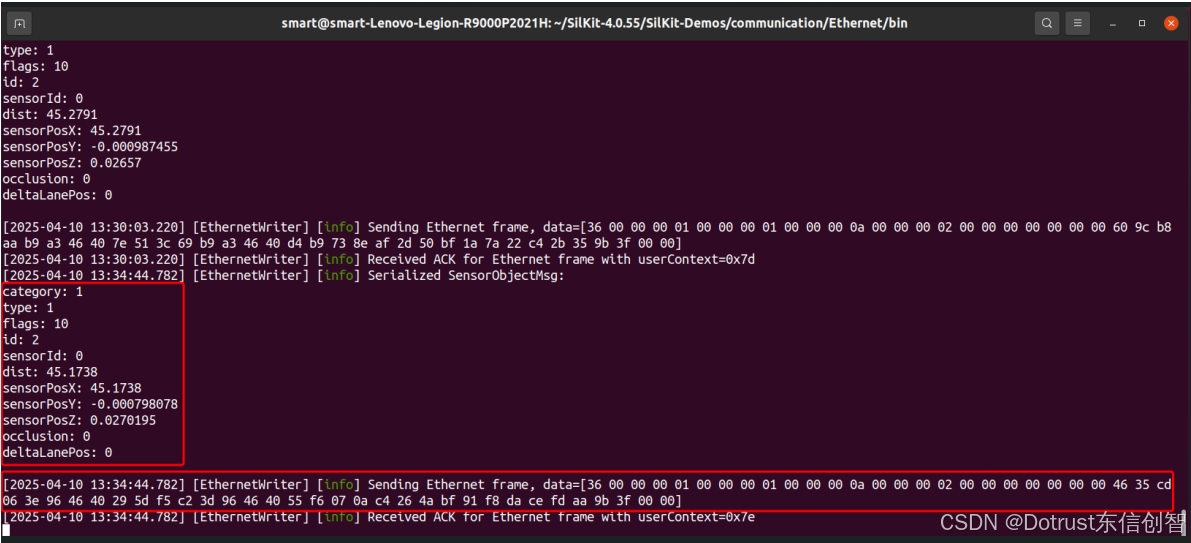

图 12 EthernetReader终端
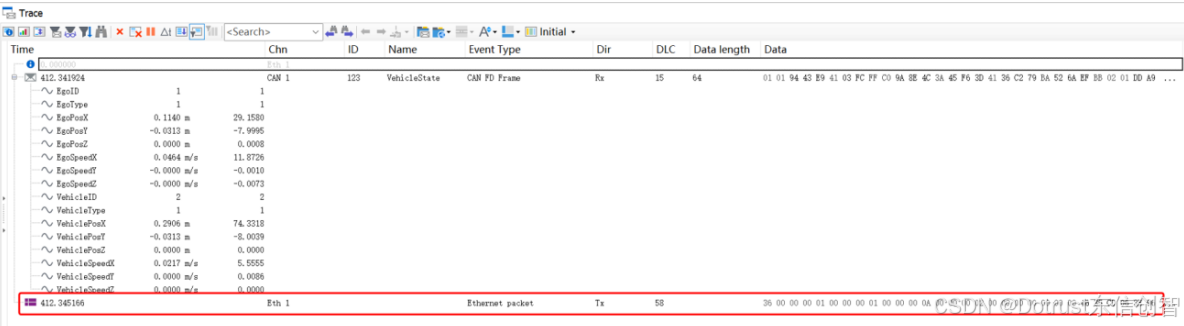
图 13 CANoe Trace Ethernet报文
3.3 算法搭建
ACC DEMO算法采用Simulink搭建,生成为C++代码后导入SIL KIT,算法作为一个SIL KIT总线节点接入来获取SIL KIT总线上发布的传感器数据作为函数输入,根据当前车速、前车速度与前车的距离等车辆状态信息,算出本车的加速度,图 14为算法节点数据流。
算法计算出的车辆控制信号通过指针推入到初始化过得RDBHandler消息中指定的内存块,通过TCP发送到TaskControl,并在parseRDBMessageEntry中调用本函数,来不断覆盖VTD 的DRIVER_CTRL信息实现对VTD中本车的控制。
3.4 集成与闭环效果
SIL KIT使用 YAML 配置文件来定义仿真环境和参与者的参数,图 15YAML配置文件里定义了仿真环境的注册地址和启用了日志追踪。
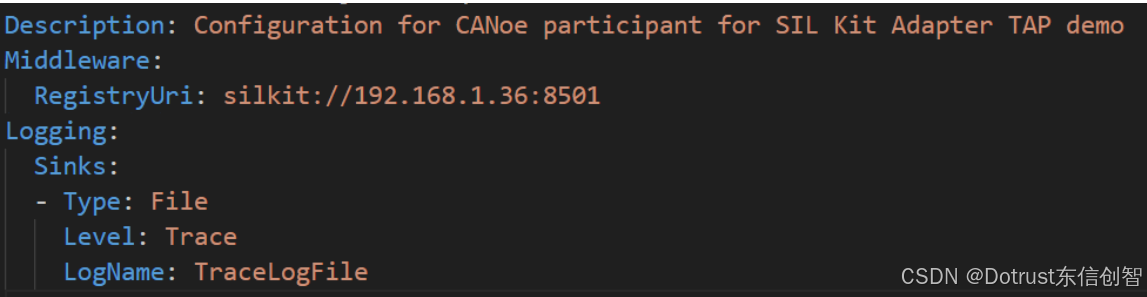
图15 YAML配置文件
在 SIL KIT的仿真场景中,往往存在多个参与者。sil-kit-registry则作为集中式的协调中心,负责管理和协调这些参与者之间的通信与交互。记录了所有参与者的信息,像参与者的名称、连接的网络端点等。当一个新的参与者启动并尝试加入仿真环境时,需向sil-kit-registry进行注册。sil-kit-registry接收这个注册请求,并将该参与者的信息添加到注册表中。同时会把其他已注册参与者的信息提供给新加入的参与者,这样新参与者就能知道在仿真环境中还有哪些其他参与者,并与它们建立通信,图 16为sil-kit-registry注册列表图。
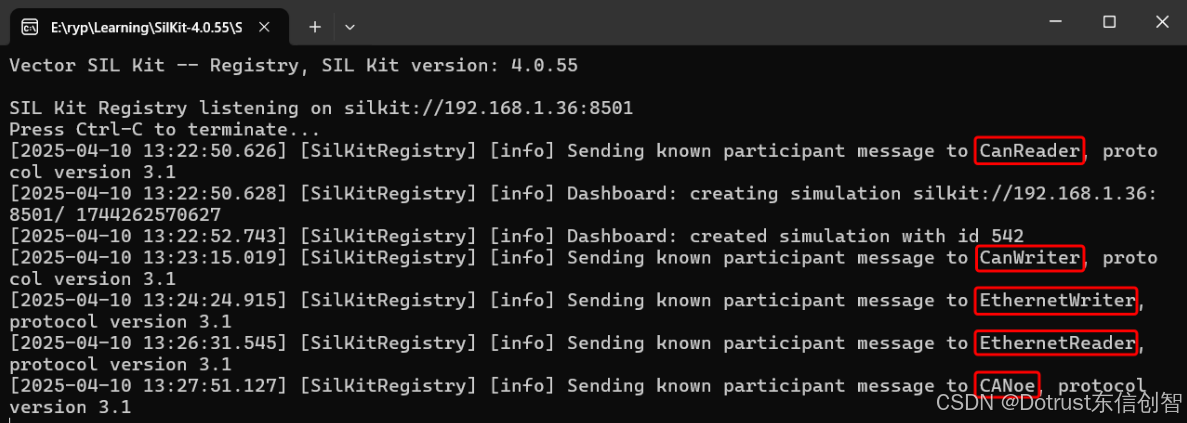
图 16 sil-kit-registry终端
完成注册后,运行源码编译后的可执行文件,进而可实现不同抽象层次的通信,并执行ACC算法,场景中添加ACC算法后的Ego车可根据前车的速度和相对距离等实时调整本车速度,达到跟车效果,如图 17所示。
4.总结
软件定义汽车(SDV)正引领汽车行业的变革,其强调软件在汽车功能实现与创新中的核心地位。在SDV的复杂开发与测试流程里,软件在环(SIL)仿真技术至关重要,软件在环测试无需实际的硬件设备,只需在计算机上运行软件和模拟模型,可大大减少硬件采购、维护和更新的成本。而仿真中间件SIL KIT在软件在环中更是扮演着不可或缺的角色,它为SDV生态系统中的各类组件与工具搭建起互联互通的桥梁,有力推动着汽车软件开发的高效迭代与创新。SIL KIT为自动驾驶算法的开发与测试提供了丰富的资源与环境。开发人员能借助SIL KIT连接自动驾驶算法仿真模块与高精度地图仿真、车辆动力学仿真、传感器仿真等多个模块。验证算法在复杂场景下的准确性与可靠性,加速算法迭代优化。下一期内容将介绍虚拟ECU的开发,深入探讨基于Vector的vVIRTUALtarget的vECU生成,以及在SIL中的应用。