PID与模糊PID系统设计——基于模糊PID的水下航行器运动控制研究Simulink仿真(包含设计报告)
1.模型简介
本仿真模型基于MATLAB/Simulink(版本MATLAB 2016Rb)软件。建议采用matlab2016 Rb及以上版本打开。(若需要其他版本可联系代为转换)
针对水下航行器控制系统参数变化和海洋环境干扰等影响,研究水下航行器运动控制系统中的深度控制问题。依据水下航行器的构造特点和水动力特性,建立水下航行器在地球坐标系中的六自由度动力学模型,结合模糊控制理论和传统PID控制方法设计水下航行器模糊PID控制器,在保留传统PID控制器的优点的基础上易于在实际应用中进行微调。实现Simulink仿真环境中模糊PID控制与传统PID控制的深度控制仿真,并对仿真结果进行比较。仿真结果表明模糊PID控制系统相较于传统PID控制对水下航行器。
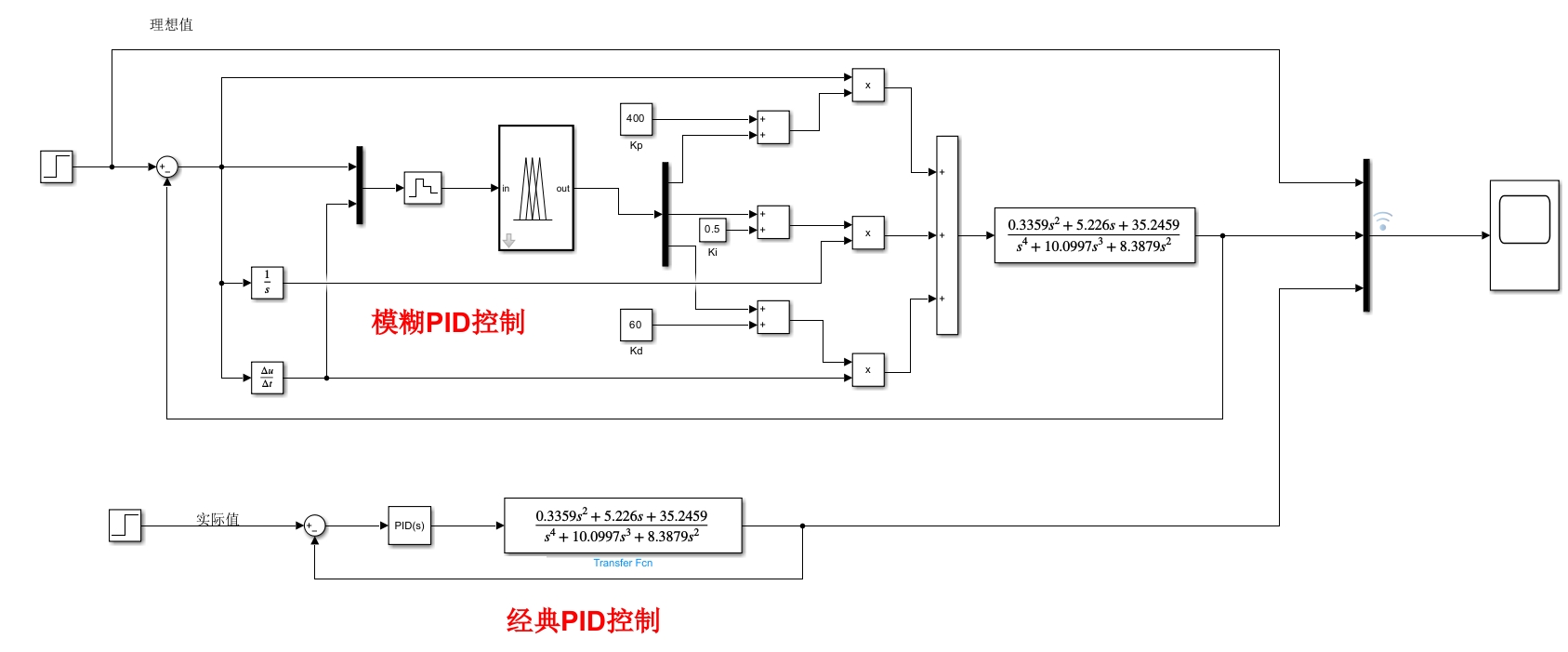
2.仿真模型
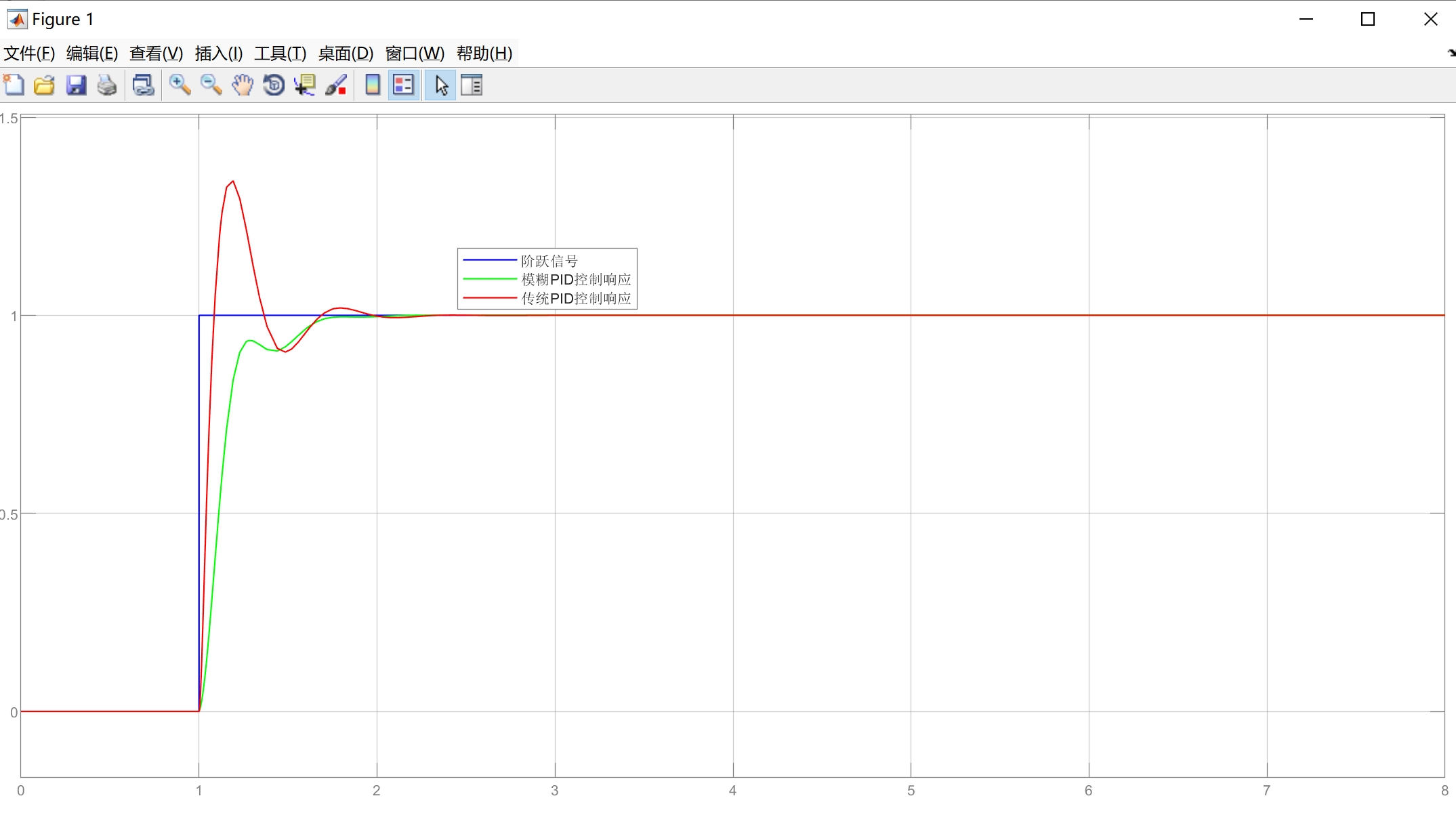
3.仿真结果
4.详细说明文档及设计报告
4.1详细说明文档
4.2简要仿真过程分析