Matlab 基于滑模自抗扰的高速列车自动驾驶算法研究
1、内容简介
Matlab222-基于滑模自抗扰的高速列车自动驾驶算法研究
可以交流、咨询、答疑
2、内容说明
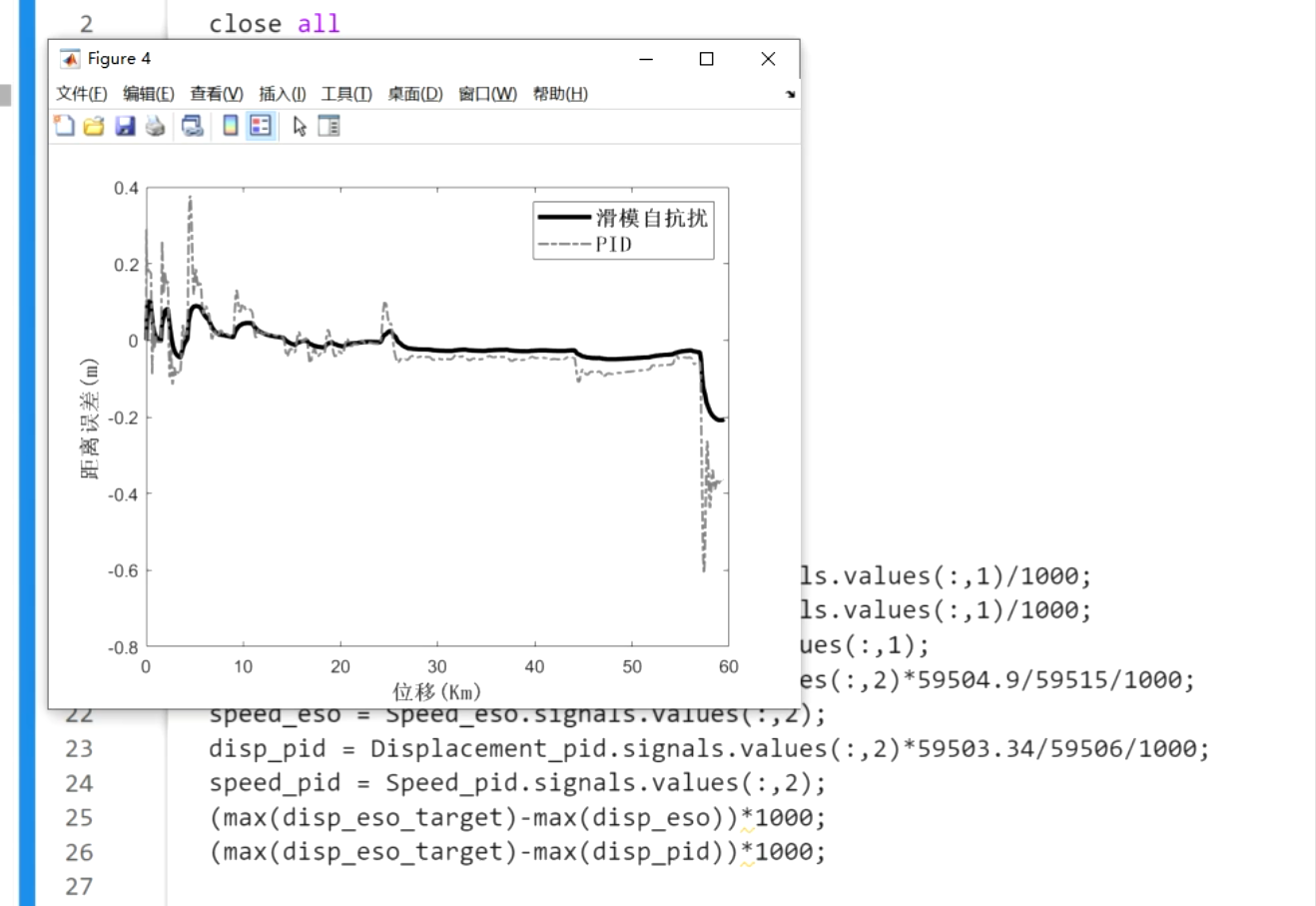
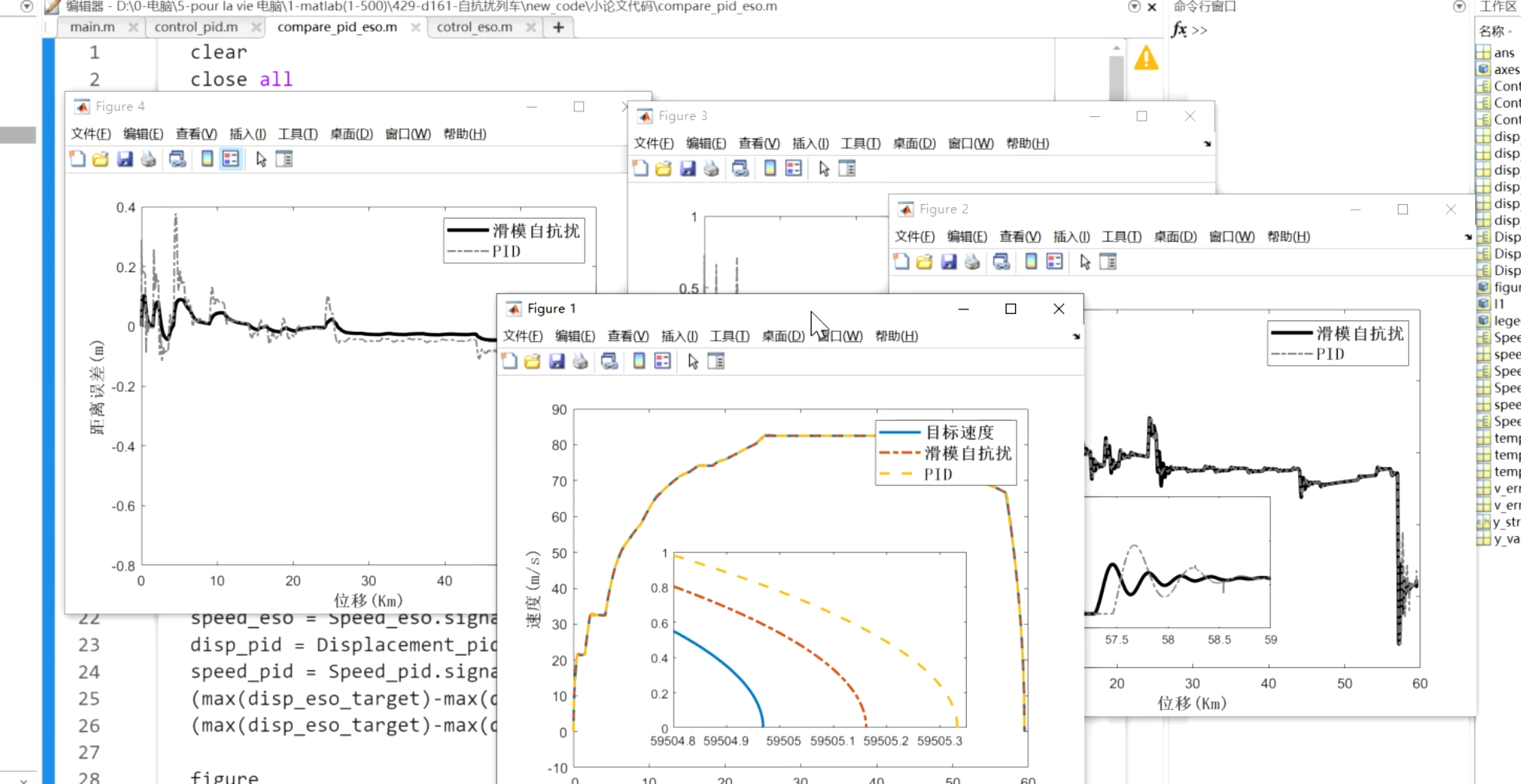
略为了研究高速列车自动驾驶,在分析列车运行过程的基础上,结合列车牵引计算模型与牵引制动系统模型,建立列车时滞控制模型,并提出列车的控制目标,即避免列车控制输入频繁切换的前提下实现高精度的速度跟踪和精确停车。提出一种基于滑模自抗扰的目标速度曲线跟踪控制算法,设计滑模面和滑模控制律,利用扩张状态观测器实现对系统扰动的估计和补偿,提高系统鲁棒性。仿真结果表明滑模自抗扰控制算法能够实现速度和位移的精确跟踪控制,保证乘坐舒适性,同时对系统内外干扰具有良好的鲁棒性。
3、仿真分析
略

4、参考论文
略