KUKA机器人中断编程2—中断相关的指令
在进行中断编程时,涉及到多个指令,包括:DECL、ON、OFF、GLOBAL、BRAKE、RESUME等。
1、中断声明
事件和子程序通过INTERRUPT DECL ... WHEN ... DO ... 来定义。
语法:INTERRUPT DECL Prio WHEN 事件 DO 中断程序
例如:INTERRUPT DECL 19 WHEN $IN[1]==TRUE DO stop1( )
其中,中断优先级为19,事件是输入信号1为真,中断程序是stop1。
注意:中断声明是一个指令,它必须位于程序的指令部分,不允许位于声明部分。
2、GLOBAL(全局)
中断只有从对其进行声明的层面起才被识别,起作用。在声明的开头加上关键字GLOBA'L就会对全局程序起作用。
语法:<GLOBAL> INTERRUPT DECL Prio WHEN 事件 DO 中断程序
如下图中的中断的有效性:
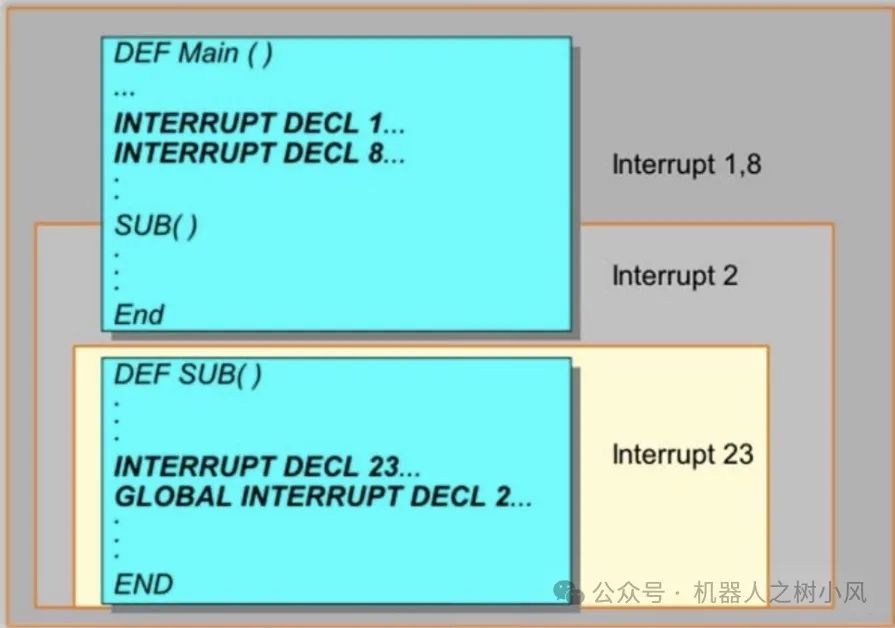
①在一个子程序中声明的中断在主程序中是未知的,不起作用。(如图中的中断 23)
②一个在声明的开头写有关键词 GLOBAL 的中断在上一层面也是已知的,起作用。(如图中的中断 2)
3、ON/OFF
对中断进行了声明后必须接着将其激活,通过INTERRUPT ON/OFF来启动或关闭中断。
ON: 激活(启动)一个中断。
OFF: 取消激活(关闭)一个中断。
例如:
INTERRUPT DECL 19 WHEN $IN[1]==TRUE DO stop1( )
INTERRUPT ON 19;中断被识别并执行
……
INTERRUPT OFF 19;中断已关闭
4、BRAKE(制动)