YOLO目标检测算法评估标准
文章目录
- 前言
- 一、Map指标
- 1、IoU(Intersection over Union)
- 2、准确率与召回率
- 3、目标检测任务中的准确率和召回率
- 1、设置阈值
- 4、目标检测中其他评估指标
- (1)PR曲线(Precision-Recall Curve)
- (2)AP(Average Precision)
- (3)mAP(mean Average Precision)
- (4)预测框
- 5、MAP取值与模型好坏之间的联系
- 二、置信度
- 1、定义
- 2、核心含义
- 3. 作用
- 总结
前言
不同类型的模型,评估指标各有侧重。
分类模型中,准确率反映预测正确的整体比例;精确率关注预测正例中实际正例的占比;召回率衡量实际正例被正确预测的程度;F1 值综合精确率与召回率,适合样本不均衡场景。
回归模型里,均方误差计算预测值与真实值误差平方的均值,能体现平均差异;平均绝对误差以误差绝对值平均,对异常值敏感度低;
聚类模型中,轮廓系数综合凝聚度和分离度,值近 1 代表聚类佳。
那么我们今天学习的YOLO目标检测模型使用什么指标评估模型的效果。
一、Map指标
目标检测中的mAP(mean Average Precision,平均精度均值) 是衡量模型性能的核心指标,综合反映了模型在不同类别、不同置信度阈值下的检测能力。
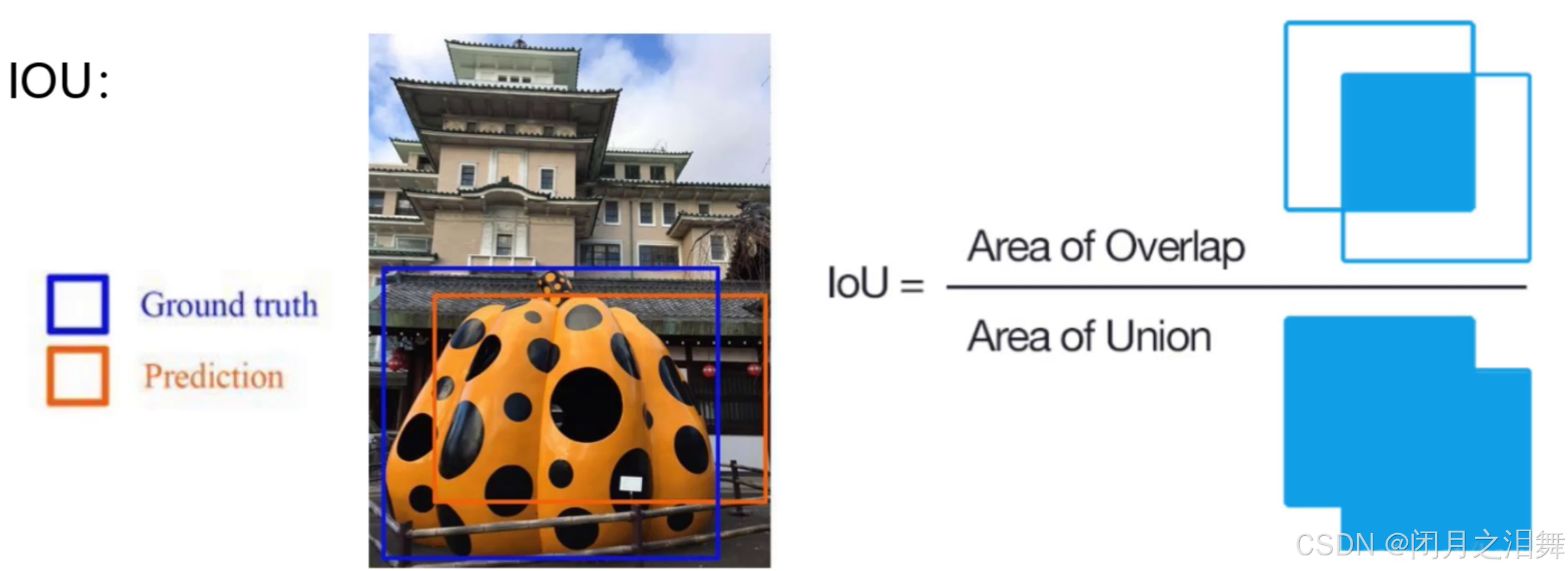
1、IoU(Intersection over Union)

定义预测框与真实框的重合度:
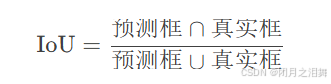
阈值(如0.5):判断预测是否正确的依据(IoU ≥ 阈值则为True Positive)。
2、准确率与召回率
混淆矩阵
TP(True Positive):正确检测到目标(IoU ≥ 阈值且类别正确)。
FP(False Positive):误检(IoU < 阈值或类别错误)。
FN(False Negative):漏检(真实目标未被检测到)。
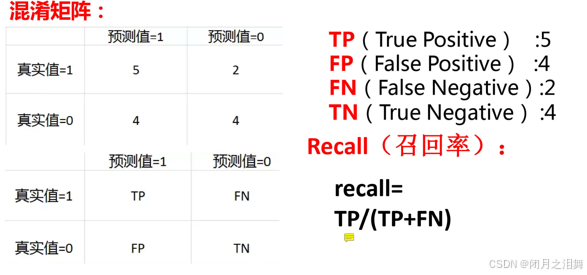
Precision(精确率)与 Recall(召回率)
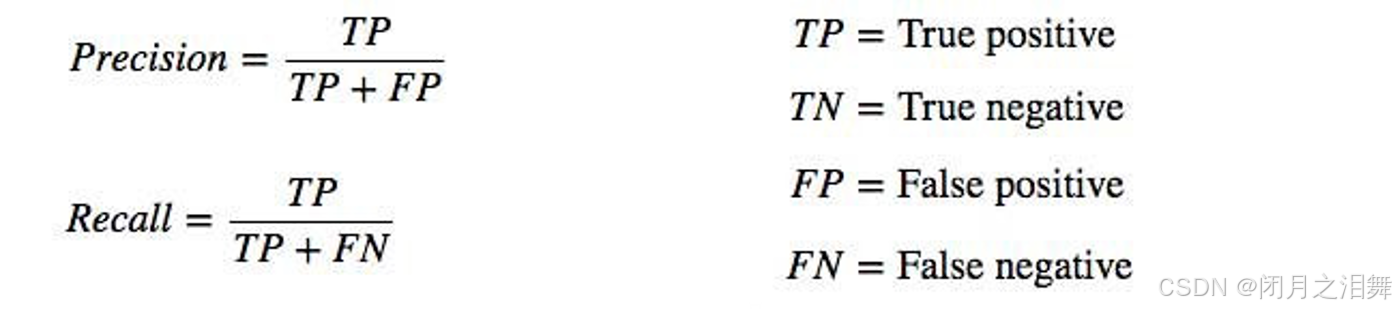
Precision:检测结果的可靠性(“查得准”),预测的结果中有多少是正确的
Recall:对真实目标的覆盖率(“查得全”),真实的结果中有多少是预测正确的
3、目标检测任务中的准确率和召回率
1、设置阈值
假设阈值为0.9,超过0.9表示检测正确1,否则检测失败0。然后统计TP、FP、FN的值然后计算准确率和召回率。
4、目标检测中其他评估指标
(1)PR曲线(Precision-Recall Curve)
- 定义与生成方法
目的:反映模型在不同置信度阈值下,精确率(Precision)与召回率(Recall)的权衡关系。
生成步骤:
排序预测框:将所有预测框按置信度从高到低排序。
逐点计算:依次将每个预测框作为当前阈值,计算对应的Precision和Recall。
绘制曲线:以Recall为横轴,Precision为纵轴,连接所有点形成曲线。
- 曲线特性
理想曲线:靠近右上方(高Recall时仍保持高Precision),面积趋近于1。
实际曲线:通常呈现下降趋势(Recall↑时Precision↓),波动取决于模型性能。
(2)AP(Average Precision)
- 定义
AP是PR曲线下的面积,量化单类别的综合检测性能。
两种计算方法:
第一,11点插值法(PASCAL VOC标准)
在Recall = [0, 0.1, 0.2, …, 1.0] 的11个点上,取对应Precision的最大值(插值)。
计算这些Precision值的平均值。
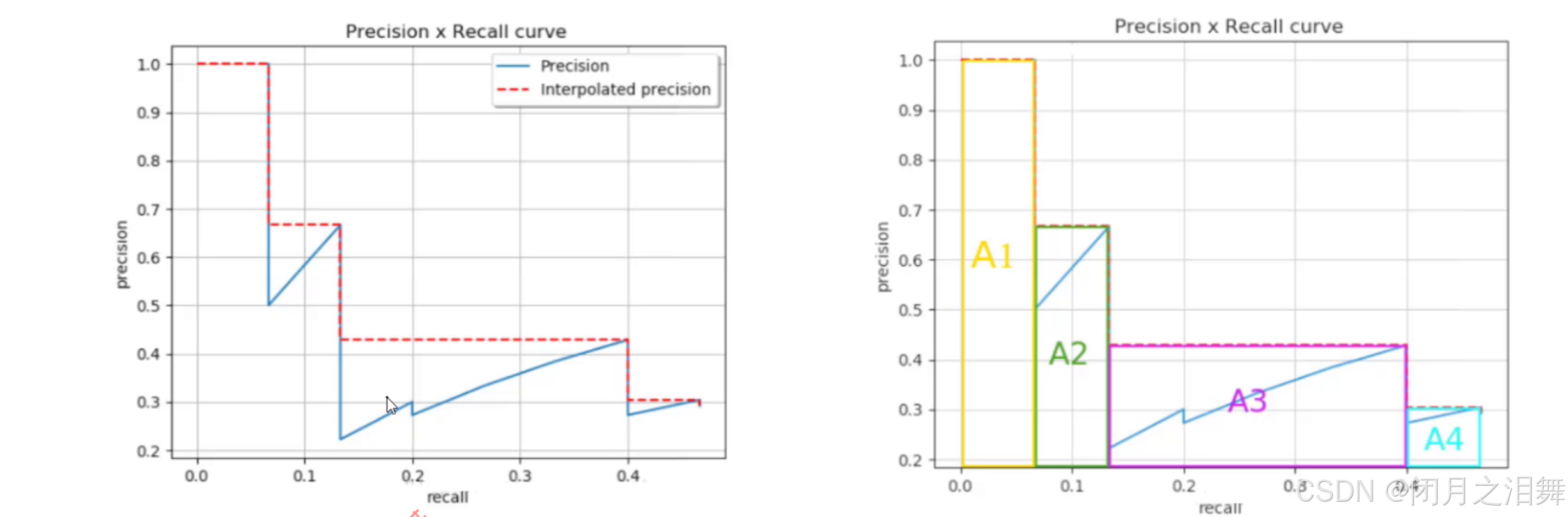
第二,全点插值法(COCO标准)
对每个Recall值,取该Recall及其右侧所有Recall对应的最大Precision。
计算所有唯一Recall区间下的面积之和。
(3)mAP(mean Average Precision)
- 定义
mAP是所有类别AP的平均值,反映模型在多类别检测中的整体性能。
其中 N 为类别数。
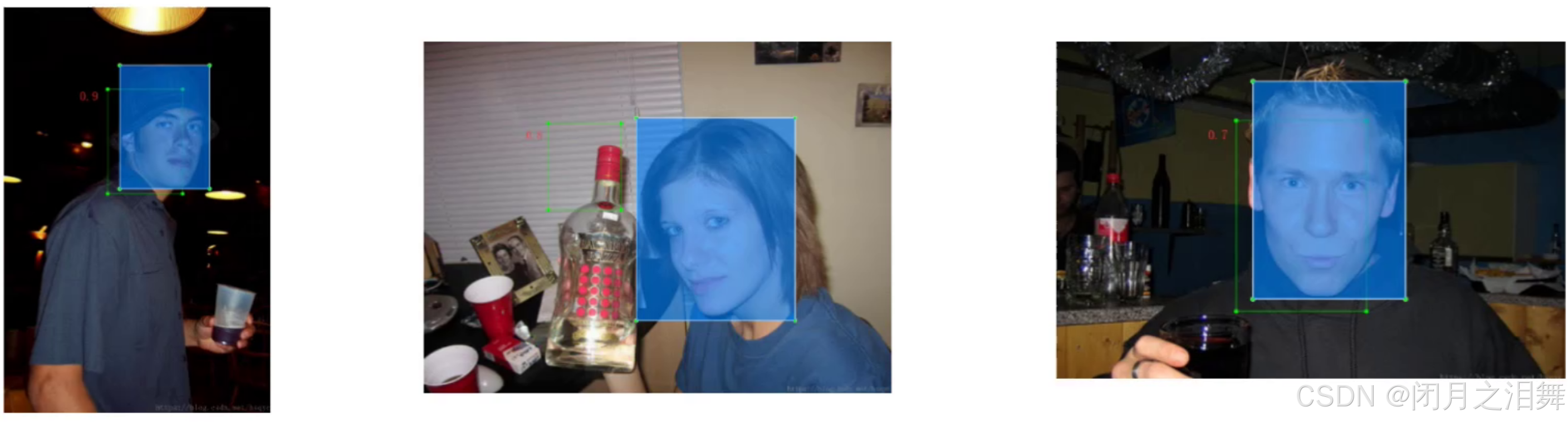
(4)预测框
在目标检测任务中,预测框(Bounding Box Prediction) 是模型对图像中可能存在目标的区域进行定位的核心输出。每个预测框包含位置信息和置信度,用于描述目标的位置、大小以及模型对其存在的可信程度。
5、MAP取值与模型好坏之间的联系
根据不同的阈值,绘制出召回率和精确率的曲线,将曲线以下的面积作为MAP值。当MAP值越大,则表示指标越好 。
mAP50:表示当 IoU 阈值为 0.5 时模型的平均精度。即只考虑预测框与真实框的重叠部分达到 50% 及以上的情况,计算所有类别的 AP(Average Precision)的平均值,AP 衡量的是随着不同置信度阈值的召回率变化,精度是如何变化的。mAP50 是一个固定的评估标准,仅关注 IoU 为 0.5 这一特定阈值下的模型性能。
mAP50 - 95:衡量的是模型在 IoU 阈值从 0.5 到 0.95 范围内的平均精度。计算的是所有类别的 AP 的平均值,其中 AP 是在 IoU 阈值从 0.5 到 0.95 的每个 0.05 步长上计算的。mAP50 - 95 考虑了更广泛的 IoU 范围,能够评估模型在不同重叠程度下的性能,提供了更全面的模型性能评估,是一个更严格的评估指标,其值通常比 mAP50 要低。
二、置信度
1、定义
在目标检测中,置信度(Confidence Score)是模型对预测框的两个关键判断的量化表达:该位置存在目标的可能性和预测目标类别的可信程度,它是目标检测模型输出的核心参数之一,直接影响检测结果的筛选和性能评估。
置信度表示某个预测框中存在目标的可能性大小,是一个介于 0 到 1 之间的数值。例如,一个预测框的目标存在置信度为 0.8,意味着模型有 80% 的把握认为该预测框中包含一个目标。
2、核心含义
单类别检测:置信度表示预测框内存在目标的概率(如人脸检测中,置信度0.9表示该位置有90%的概率是人脸)。
多类别检测:置信度通常为 目标存在概率 × 类别概率,反映“该位置存在某类目标”的综合可信度。

例如:某框的置信度=0.8(存在目标的概率)× 0.9(属于“猫”的概率)= 0.72。
3. 作用
过滤冗余检测:通过设定阈值(如0.5),剔除低置信度的预测(减少误检)。
排序依据:在计算AP时,需按置信度从高到低排序预测框,生成PR曲线。
模型优化参考:置信度校准(Calibration)可提升模型对预测可靠性的判断能力。
总结
在目标检测领域,置信度与 mAP 是核心评估指标,分别从微观和宏观驱动模型优化。置信度量化单个预测框可靠性,通过阈值平衡误检与漏检,校准精度影响评估,可借损失函数设计或后处理优化。mAP 综合反映模型多类别、多尺度性能,通过计算各类别 AP 均值得出,结合不同 IoU 阈值评估定位精度,高 mAP 意味着召回率与精确率的平衡,还需结合细分指标优化。二者相互关联,置信度影响 AP 计算,mAP 反馈校准方向,实际应用需依场景调整阈值,关注置信度与真实性能匹配,提升模型可靠性。