卫星导航算法程序设计——单点定位测速(SPV)
本文使用C++语言独立编写SPV软件,可使用二进制文件数据流和实时数据流进行SPV解算。相关成果可通过资源免费下载。
一、程序总体设计
图1展示了整个个单点定位测速系统的架构。整个流程可以分为几个主要模块:
(1)底层运算模块
这一模块包括三个子模块:时间转换模块、坐标转换模块和矩阵运算模块。这些模块为上述数据处理和SPV解算提供底层的运算支持。
(2)数据获取与处理
数据解码模块从网络端口或者文件流中获取原始二进制数据,并将其解码为星历数据、观测数据和电离层参数。
粗差探测用于对获取的数据进行初步的错误检测,剔除粗差。
(3)SPV 解算
这一模块在流程中起到关键作用,它基于 “数据获取与处理” 模块提供的数据,进行信号发射时刻的卫星位置和速度的计算。然后计算地球自转改正、电离层延迟、对流层延迟、相对论改正,而后进行最小二乘单点定位,多普勒单点测速,最后对单点定位的结果进行精度评定。
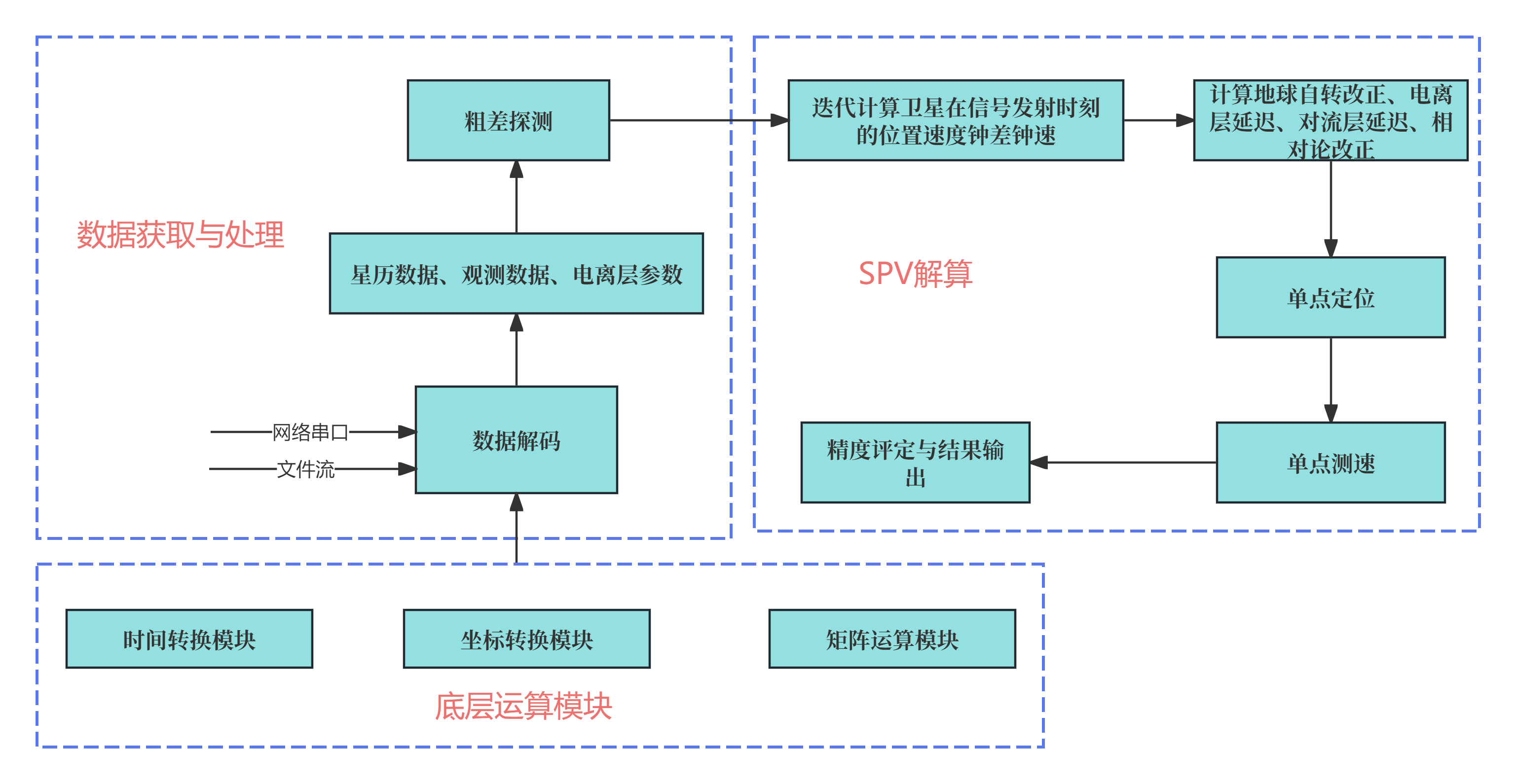
图1 软件架构
二、算法设计
2.1 时间板块
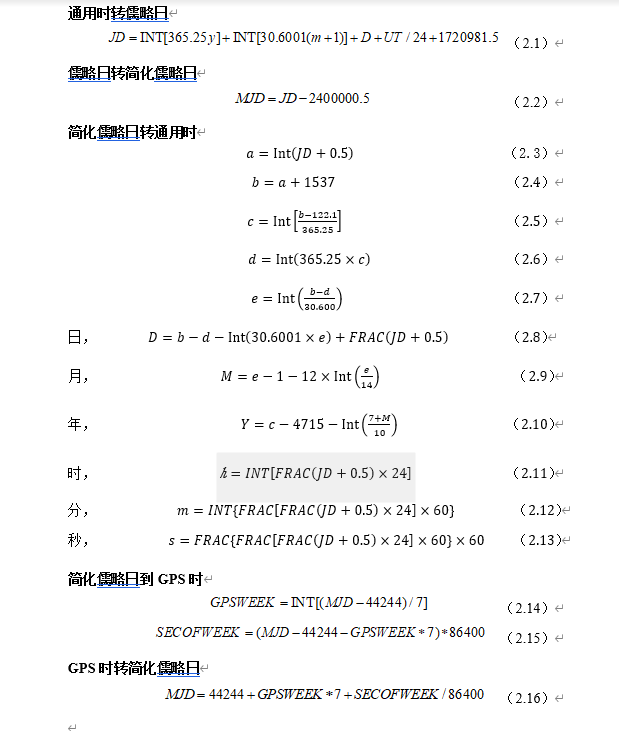
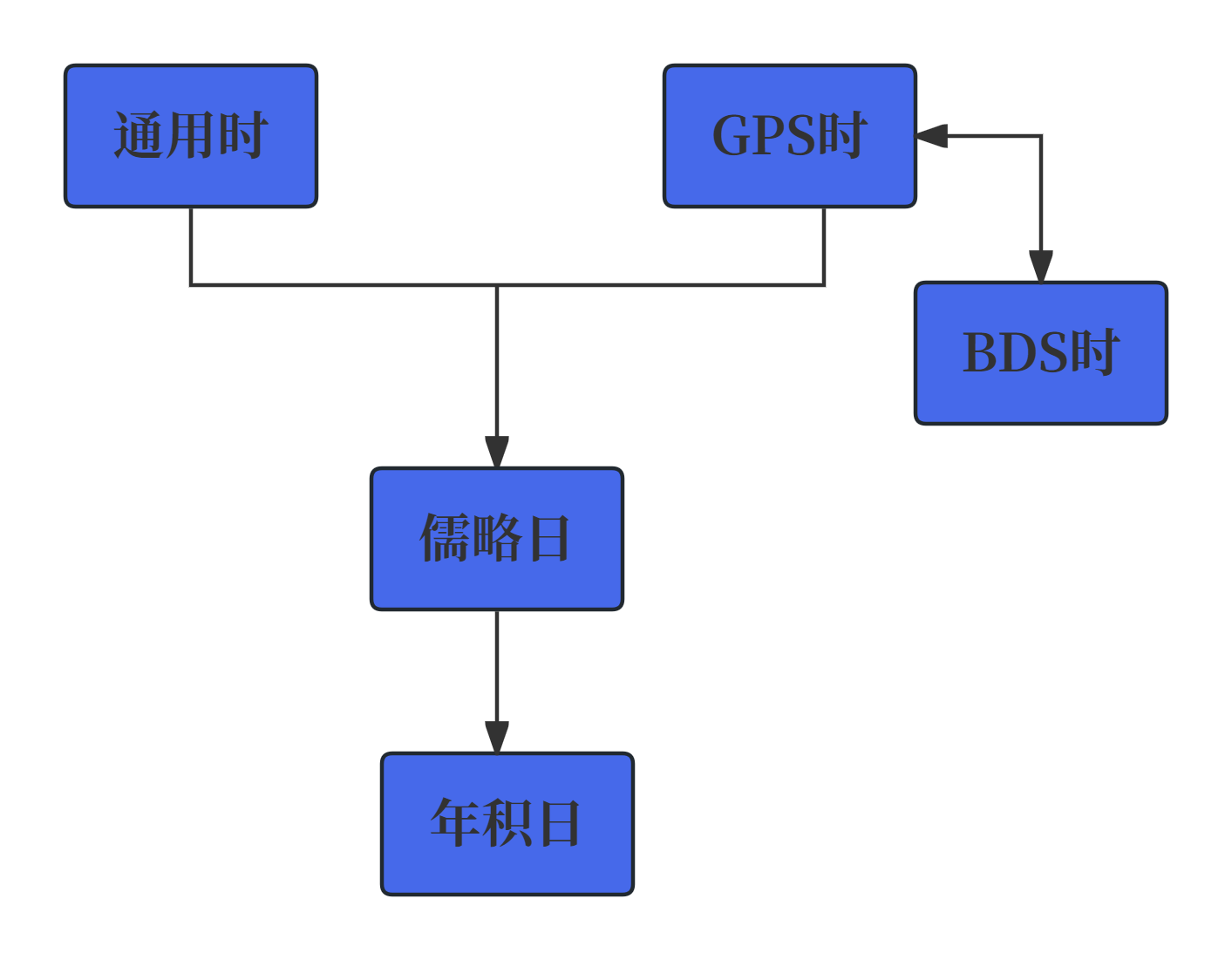
图2 时间转换
2.2 坐标转换板块
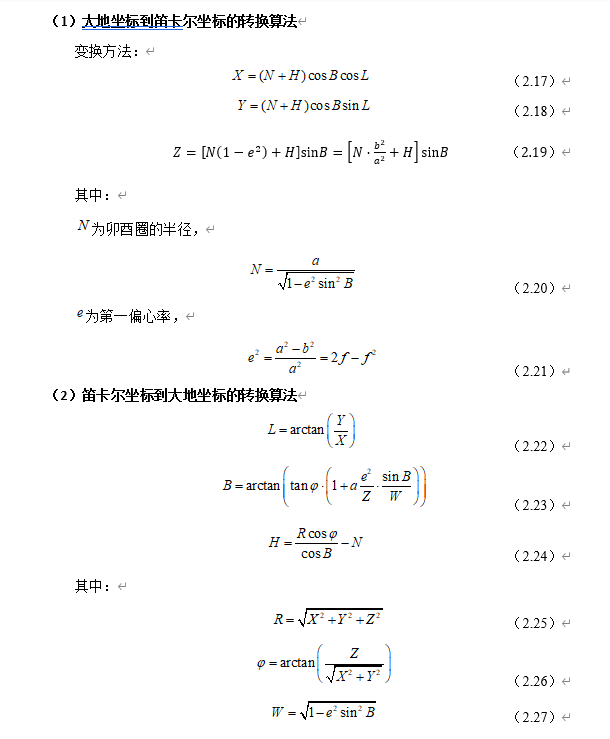
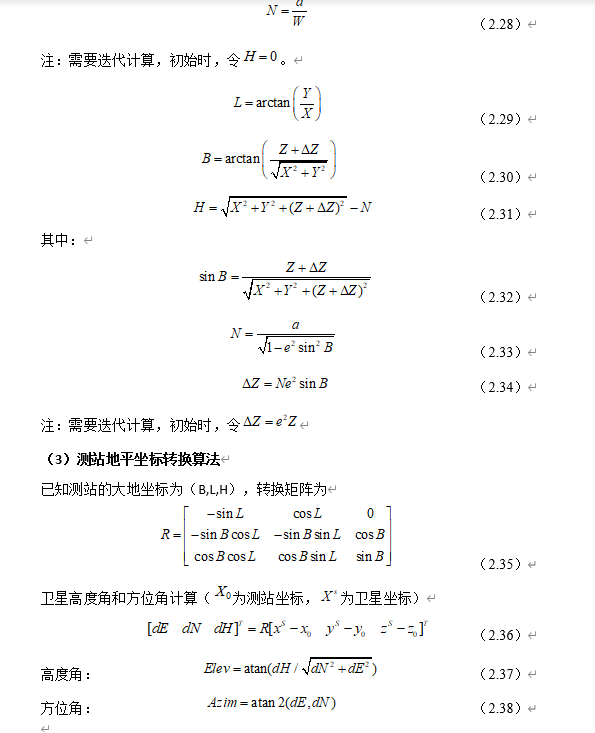
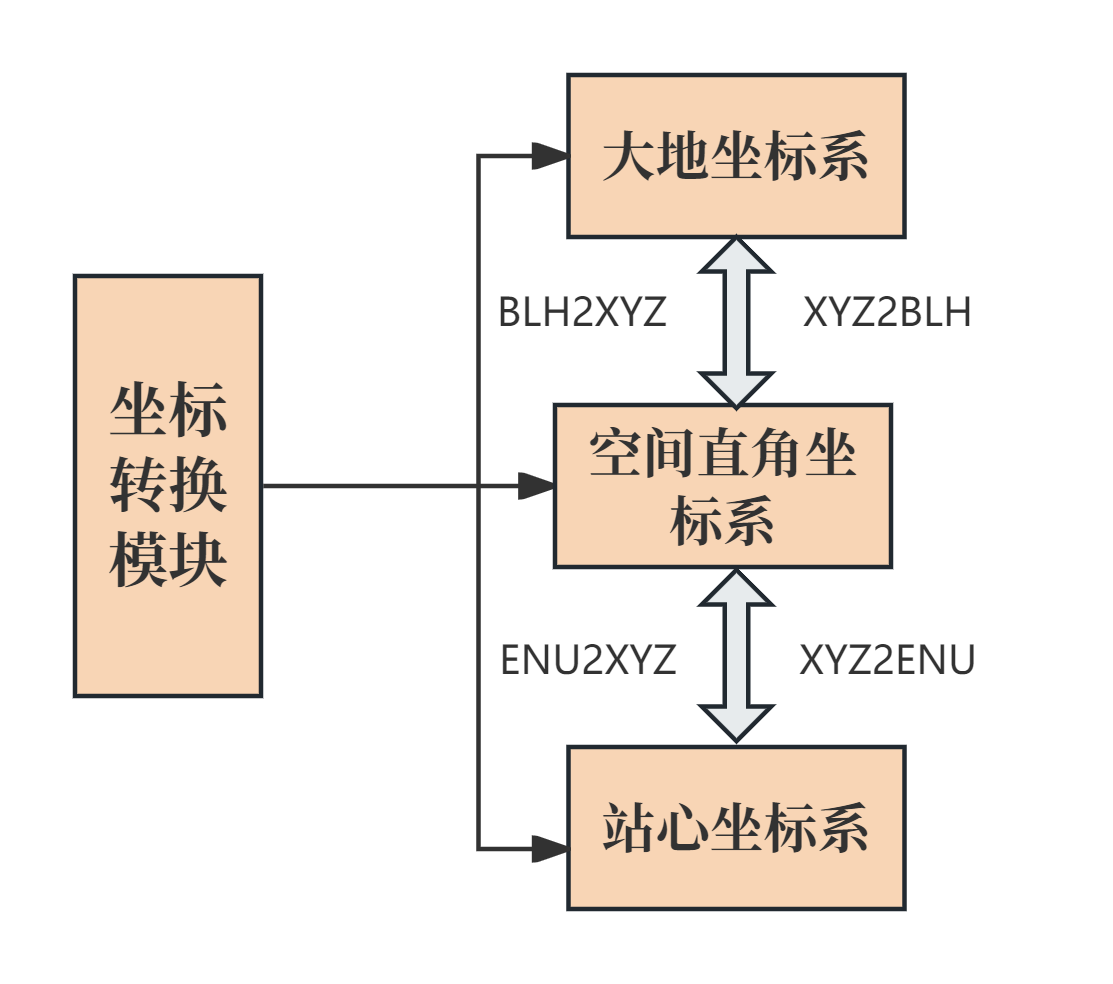
图3 坐标转换
2.3 解码板块
(1)Binary数据头结构
表2.1 Binary数据头结构
| 1 | AA |
| 2 | 44 |
| 3 | 12 |
| 4 | Header Length |
| 5 | Message ID |
| 8 | Message Length |
| 12 | Week |
| 13 | ms |
其中,AA,44,12为同步符,标志着消息的开始,解码过程中匹配到同步符之后才开始数据的解码。注意第13个字节处的GPSsec解码出来的单位为ms,需要转换成s
(2)NonAtel CRC校验程序
数据通信领域中最常用的一种差错校验码,用于验证数据在通信过程中是否存在错误,可靠性很高。
CRC校验原理
被校验的原数据转换成二进制序列,假设共K位
以一定规则产生一个新的二进制序列,假设共R位,即CRC校验码
把新的二进制序列附加在原数据二进制序列后,共K+R位,发送出去
◼ 接收端接收数据后,把原数据的K位二进制序列按相同规则产生一 个R位二进制序列与附加的R位二进制序列进行比较,相同表示传 递的数据没有问题,不相同表示传递的数据出现错误与误差。
对应函数:
#define POLYCRC32 0xEDB88320u /* CRC32 polynomial */
unsigned int crc32(const unsigned char *buff, int len)
{
int i,j;
unsigned int crc=0;
for (i=0;i<len;i++)
{
crc^=buff[i];
for (j=0;j<8;j++)
{
if (crc&1) crc=(crc>>1)^P0LYCRC32;
else crc>>=1;
}
}
return crc;
}
(3)原始观测值数据解码
表2.2 原始观测值数据结构
| Fielb Format Binary Binary Type Bytes Offset | |||||
| 1 | RANGE header | Log header.See Messages on page 30 formore information. | H | 0 | |
| 2 | # obs | Number of observations with information to follow 1 | Ulong | 4 | H |
| 3 | PRN/slot | Satellite PRN number of range measurement Refer to PRN Numbers on page 49 | Ushort | 2 | H+4 |
| 4 | glofreq | (GLONASS Frequency +7)(see GLONASS Slot and Frequency Numbers section ofthis manual) | Ushort | 2 | H+6 |
| 5 | psr | Pseudorange measurement(m) | Double | 8 | H+8 |
| 6 | Psr a | Pseudorange measurement standard deviation(m) | Float | 4 | H+16 |
| 7 | adr | Carrierphase,in cyces (accumulated Dopplerrange) | Double | 8 | H+20 |
| 8 | adr a | Estimated carrler phase standard deviation(cycles) | Float | 4 | H+28 |
| 9 | dopp | Instantaneous carrler Doppler frequency (Hz) | Float | 4 | H+32 |
| 10 | C/No | Carrler to noisedensity ratio C/No=10[log10(S/N₀)](dB-Hz) | Float | 4 | H+36 |
| 11 | locktime | Number of seconds of continuous tracking(no cycle slipplng) | Float | 4 | H+40 |
| 12 | ch-tr- status | Tracking status(see Table 149:Channel Tracking Status on the next pageand the example in Figure 15:Channel Tracking Example on the next page) | ulong | 4 | H+44 |
| 13 | Next PRN offset =H+4+(#obs×44) | ||||
| variable | XXXX | 32-bit CRC(ASCII and Binary only) | ulong | 4 | |
| variable | [CR][LF] | Sentence terminator(ASCII only) | - | - | - |
原始观测值解码,就是 OEM 中的 Range 模块,解码内容其实就是对应 RINEX 文件中的“.o”文件中的内容。Range 的数据标识 Message ID 为43。Range 数据内容包括表2.2中的内容。其中尤其需要注意的是,由于载波相位的观测值单位是周,这里最好直接转成m单位,这样方面后续使用;另外,最终的相位测量值需要乘以“-”号,DOPP 测量值也是。 当解码出上面的数据后,最后的信号跟踪状态数据“ch-tr-status”中就有卫星系统、信号频率,信号跟踪状态等信息。 根据信号的标识,可以解码得到对应的频率,本次本次实习中,我们需要用到的卫星信号频率为:
对于 GPS 卫星
L1: 1575.42 MHz; 具体频点L1I
L2: 1227.6 MHz; 具体频点L2I
对于 BDS 卫星
B1:1561.098 MHz; 具体频点B1I
B3:1268.52 MHz; 具体频点B3I
在解码具体数值,因为不同数值所占字节数不同,所以解码的时候我们需要定义截取不同字节的函数。在C++里面,可以定义一个类来提取不同字节的数据。
表2.3 提取不同数据类型的方法
| uint8_t | 无符号8位整数 |
| int8_t | 有符号8位整数 |
| uint16_t | 无符号16位整数(小端) |
| uint32_t | 无符号32位整数(小端) |
| int32_t | 有符号32位整数(小端) |
| float | 单精度浮点数(小端) |
| double | 双精度浮点数(小端) |
(4)广播星历数据解码
1.GPSEPHEM 7
2.BDSEPHEMERIS 1696
表2.4 BDS广播星历参数
| 参数 | 定义 | 数据类型 | 单位 | 解码位置 |
| toe | 星历参考时间 | Ulong | s | H+72 |
| √A | 长半轴的平方根 | double | m1/2 | H+76 |
| e | 偏心率 | double | - | H+84 |
| ω | 近地点幅角 | double | π | H+92 |
| ∆n | 卫星平均运动速率与计算值之差 | double | π/s | H+100 |
| M0 | 参考时间的平近点角 | double | π | H+108 |
| Ω0 | 按参考时间计算的升交点经度 | double | π | H+116 |
| Ω˙ | 升交点赤经变化率 | double | π/s | H+124 |
| i0 | 参考时间的轨道倾角 | double | π | H+132 |
| IDOT | 轨道倾角变化率 | double | π/s | H+140 |
| Cuc | 纬度幅角的余弦调和改正项的振幅 | double | rad | H+148 |
| Cus | 纬度幅角的正弦调和改正项的振幅 | double | rad | H+156 |
| Crc | 轨道半径的余弦调和改正项的振幅 | double | m | H+164 |
| Crs | 轨道半径的正弦调和改正项的振幅 | double | m | H+172 |
| Cic | 轨道倾角的余弦调和改正项的振幅 | double | rad | H+180 |
| Crs | 轨道倾角的正弦调和改正项的振幅 | double | rad | H+188 |
GPS卫星星历和 BDS 卫星星历存在部分差异,但是绝大部分数据内容都是相同的,因此只需要定义其中一个星历即可,不需要为每一个卫星系统都定义星历结构体,后面计算卫星位置的模块也如此,这样可以大大减少冗余代码,提高代码的可复用性。
除了两类必需的数据之外,还解码了接收机参考定位结果数据,电离层参数数据,后者主要用于单频定位
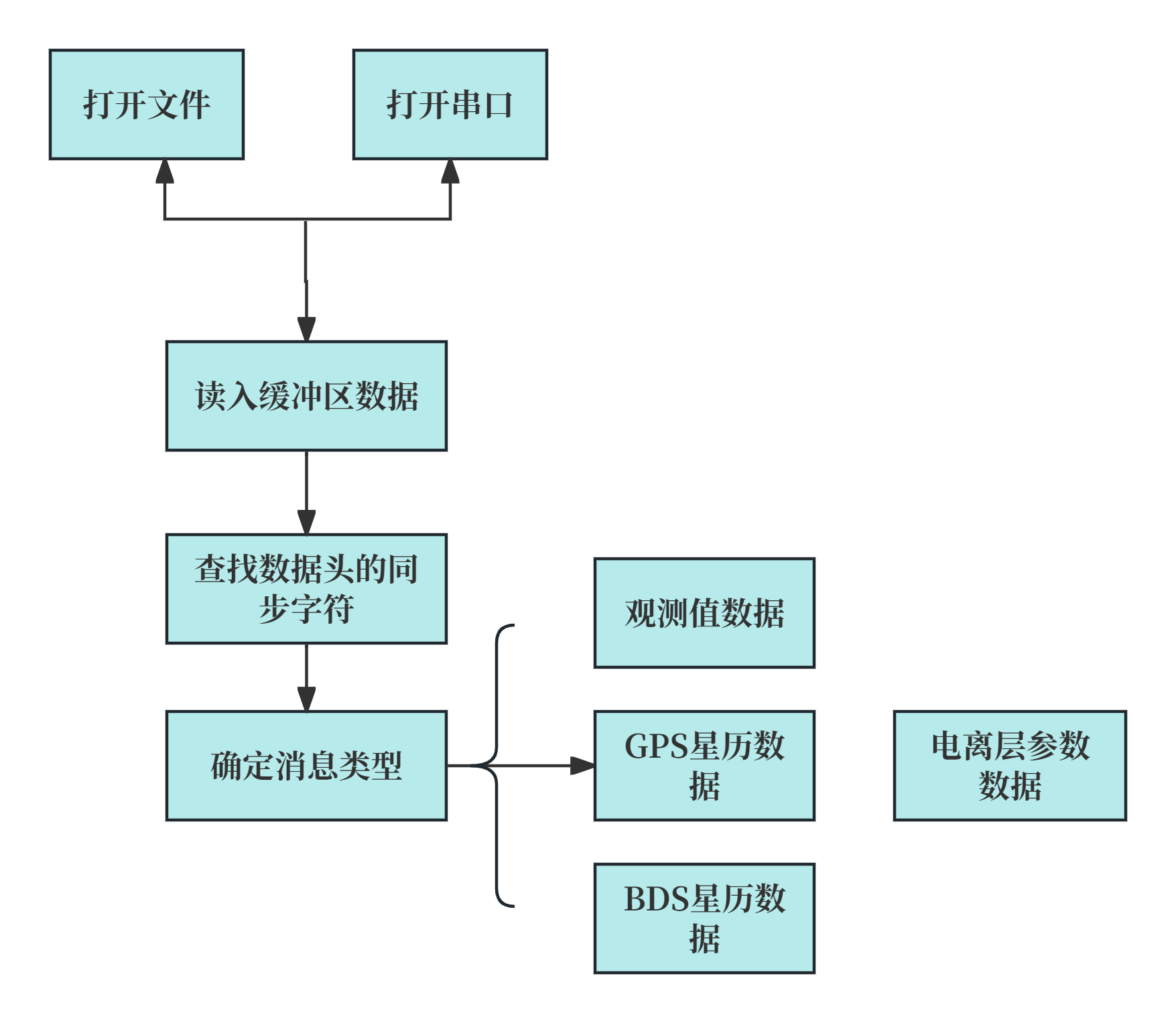
图4 解码板块
2.4 卫星位置、速度、钟差计算
卫星位置计算参见文章卫星导航算法程序设计——广播星历与卫星位置计算。
GPS卫星速度及钟差计算:
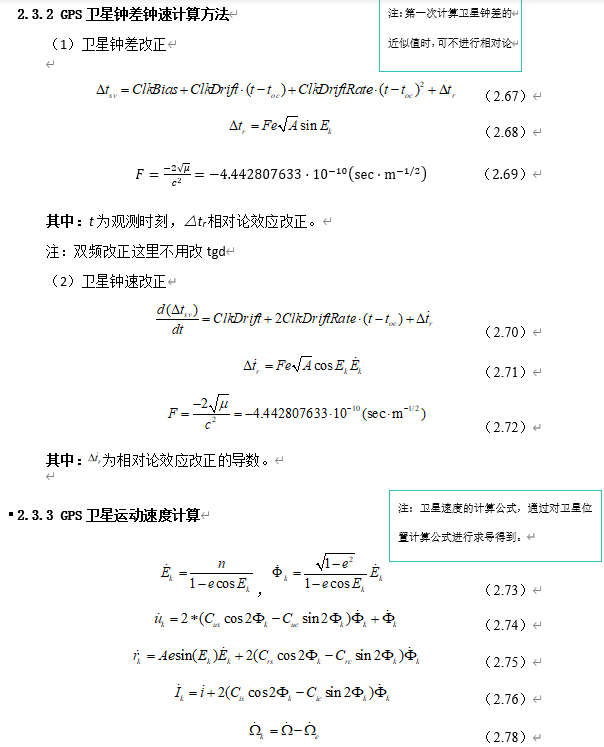
Δtr项为相对论效应改正项,ClkBias为钟偏,ClkDrift为钟速,ClkDriftRate为钟漂。按照图5进行迭代解算,迭代出卫星信号的发射时刻,并计算信号发射时刻的卫星位置。
BDS的卫星位置和速度计算可参见北斗接口文档。
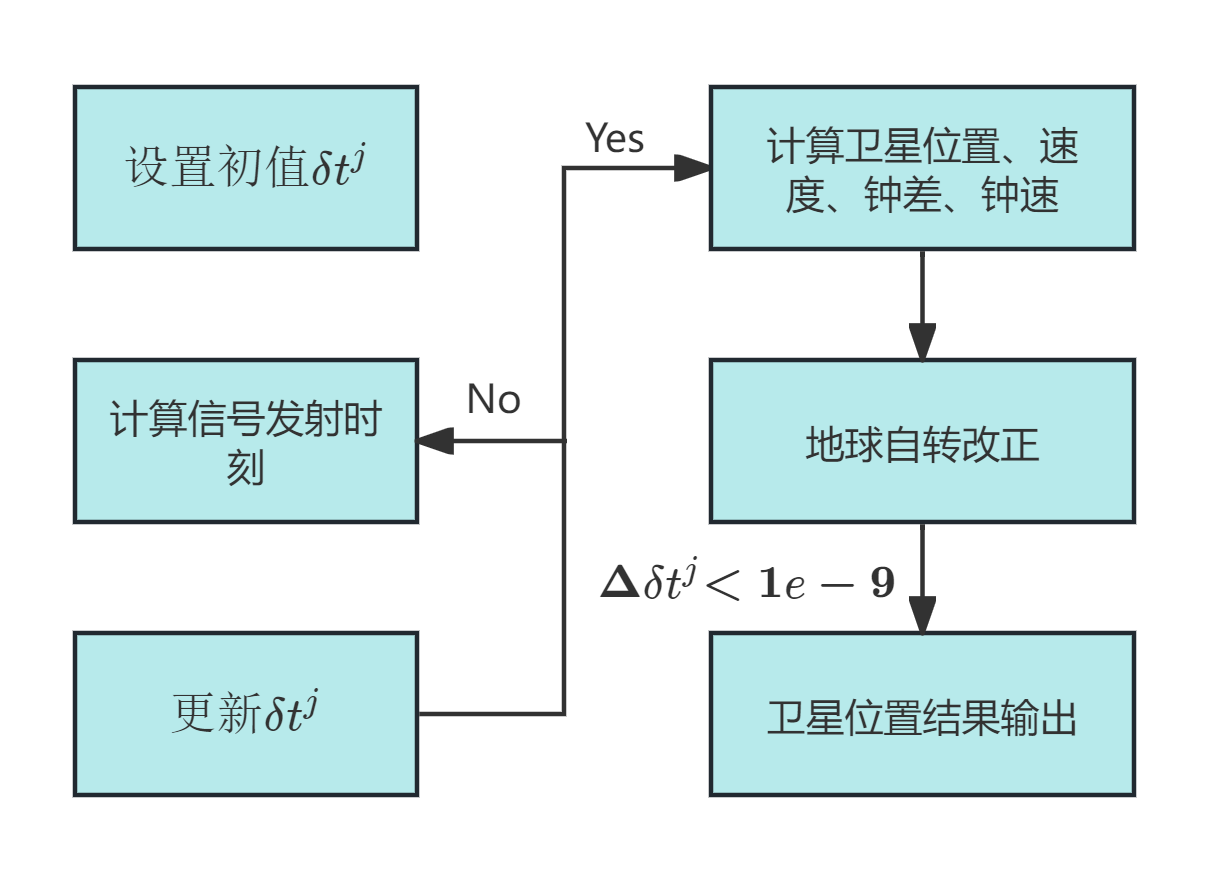
图5 钟差迭代计算
2.5 误差改正
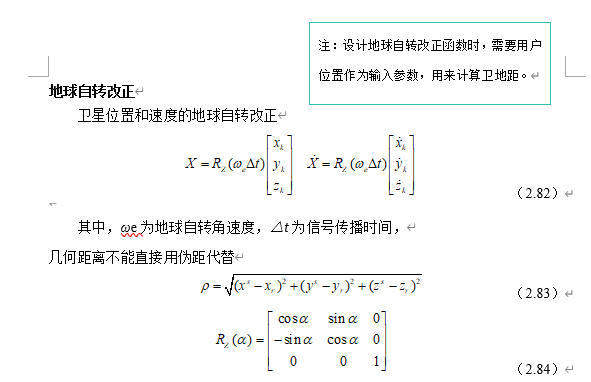
地球自转改正
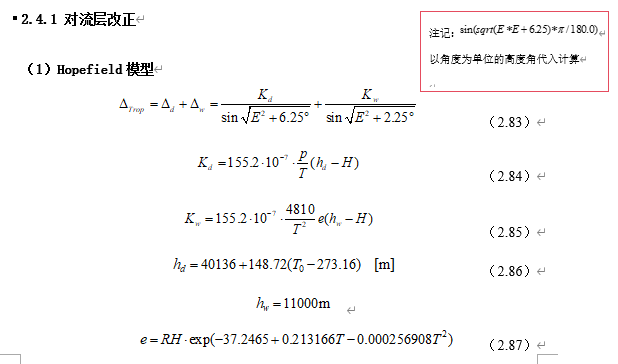
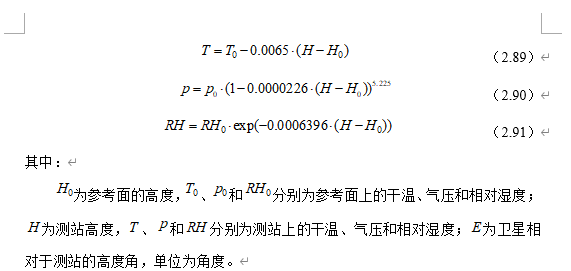
对流层改正
电离层改正
1 双频消电离层模型
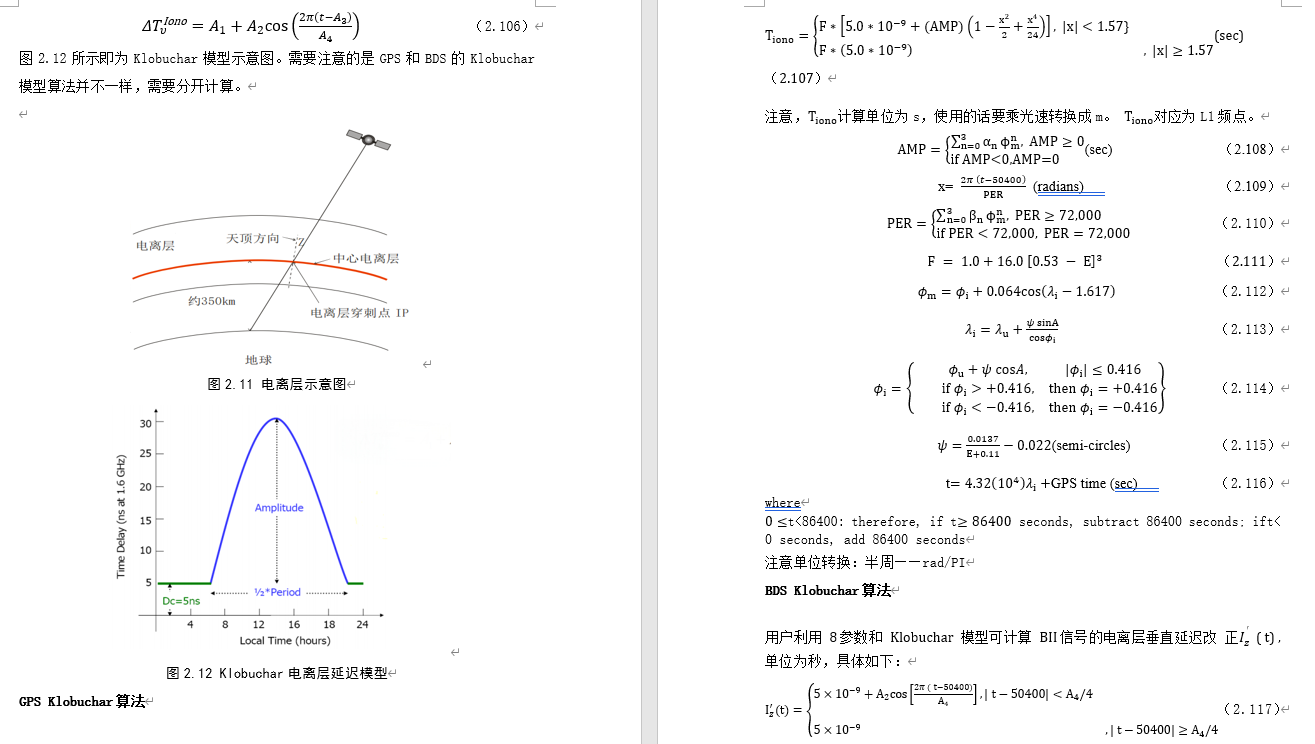
2 klobuchar模型
粗差探测
图6 误差改正
粗差探测之后,若探测到该观测值为粗差,则标记该观测值对应的卫星不可用。不进入后续的最小二乘解算。先地球自转改正再对流层改正,这两个顺序不能变,对流层和电离层的改正顺序可以改变。地球自转改正时不要重复改正,迭代计算改正值。在进行电离层改正时,根据选择的定位模式调用不同的函数。单频则使用Klobuchar模型,并作接收机时延的改正,双频使用双频改正。第一次迭代不计算对流层和电离层改正,因为接收机的初始位置设置为(0,0,0),无法计算高度角和方位角。同时注意对流层和电离层改正值的单位,应该以m为单位参与解算。
2.6 SPP解算
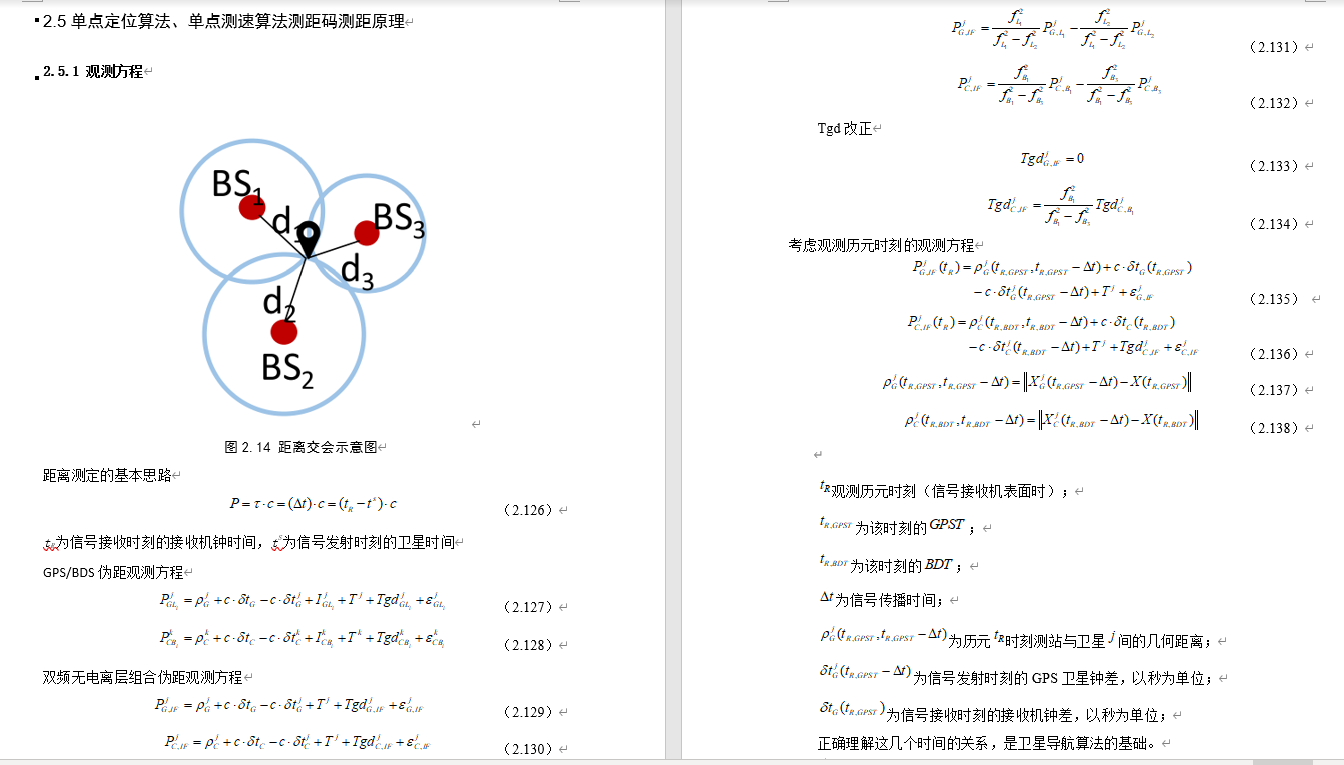
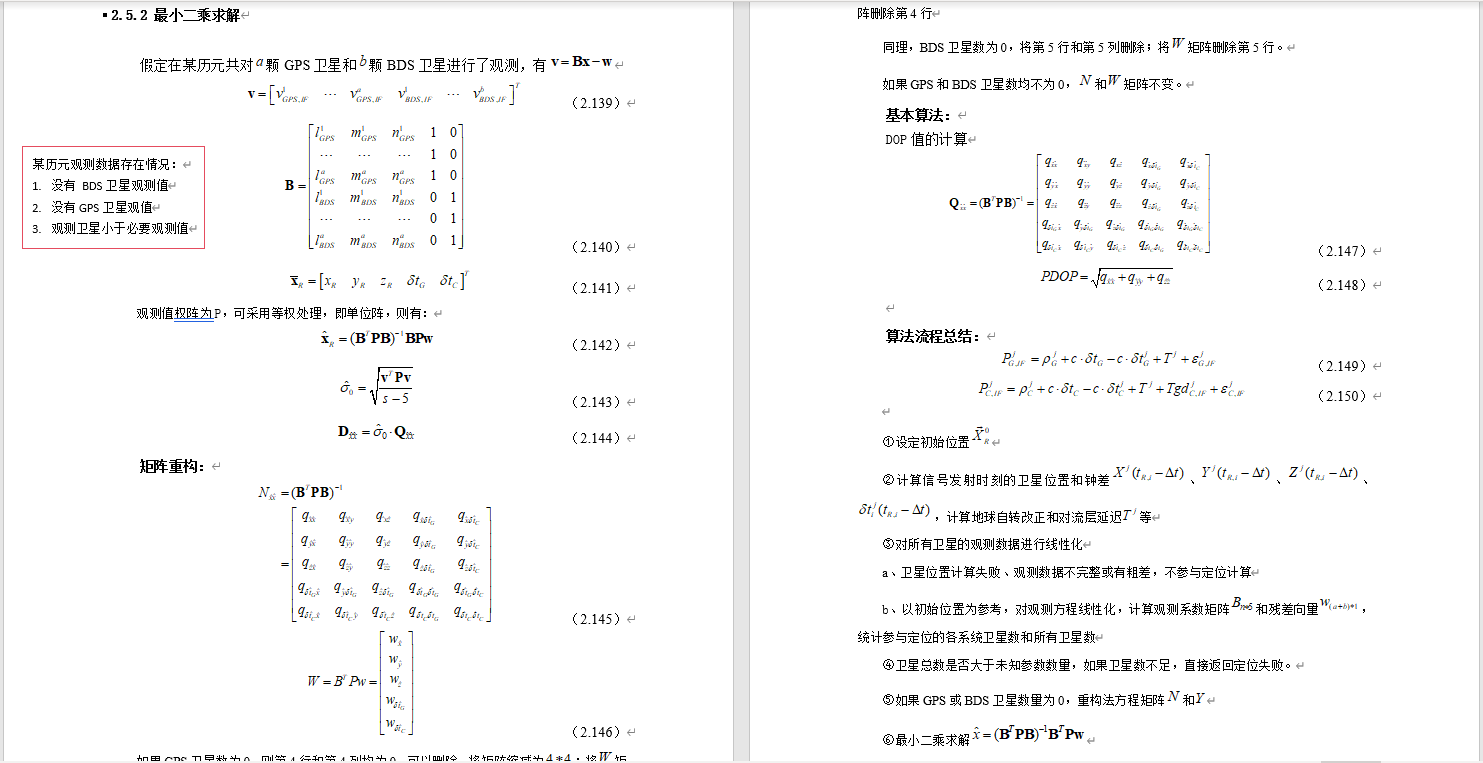
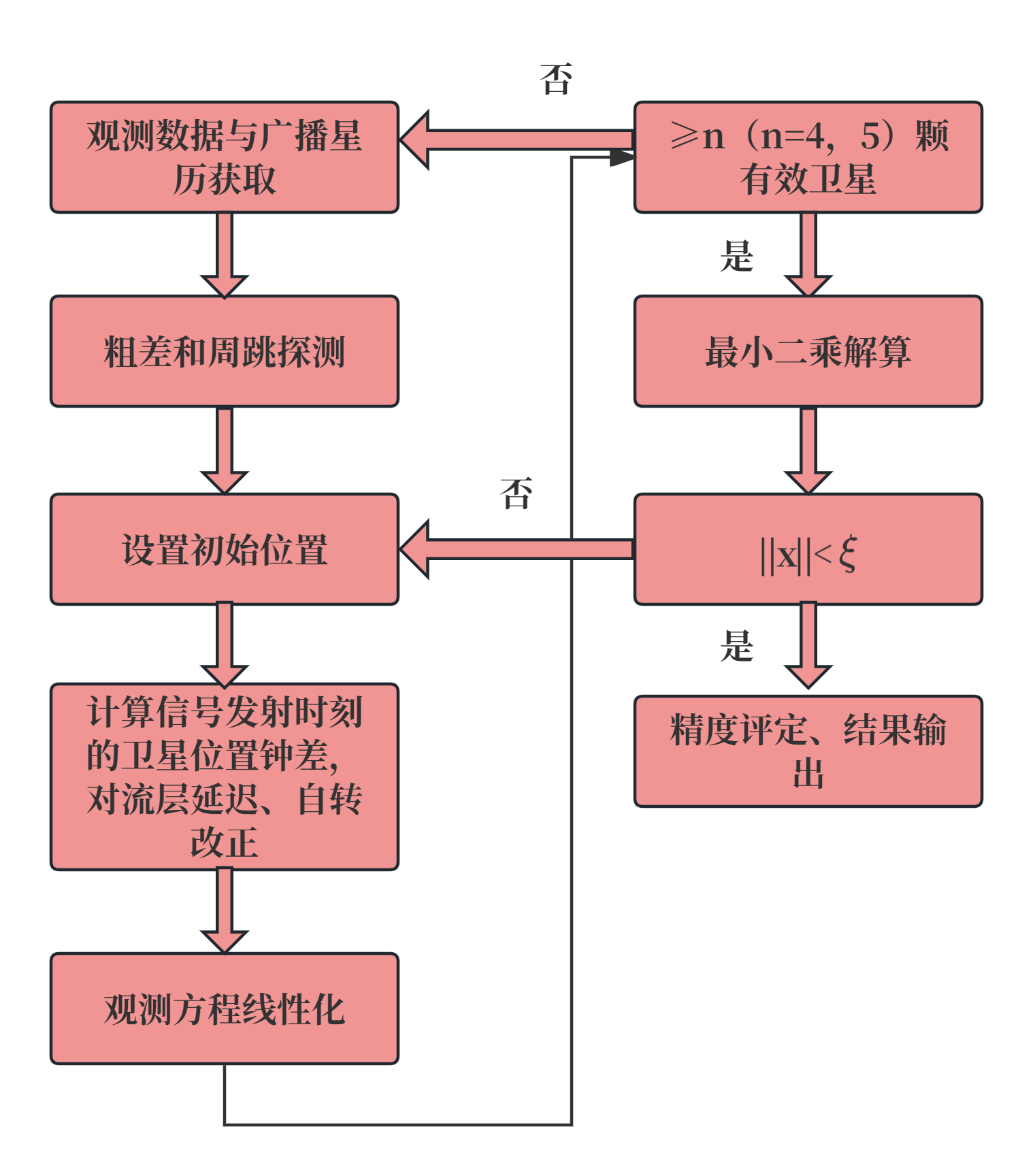
图7 单点定位
①设定初始位
②计算信号发射时刻的卫星位置和钟差,计算地球自转改正和对流层延迟等
③对所有卫星的观测数据进行线性化
a、卫星位置计算失败、观测数据不完整或有粗差,不参与定位计算
b、以初始位置为参考,对观测方程线性化,计算观测系数矩阵和残差向量,统计参与定位的各系统卫星数和所有卫星数
④卫星总数是否大于未知参数数量,如果卫星数不足,直接返回定位失败。
⑤如果GPS或BDS卫星数量为0,重构法方程矩阵
⑥最小二乘求解
⑦检查是否收敛,如果没有收敛,重新设置初始位置
⑧迭代计算②③④⑤⑥⑦⑧,直到收敛
⑨定位精度评价,计算PDOP和标准差。
2.7 多普勒测速
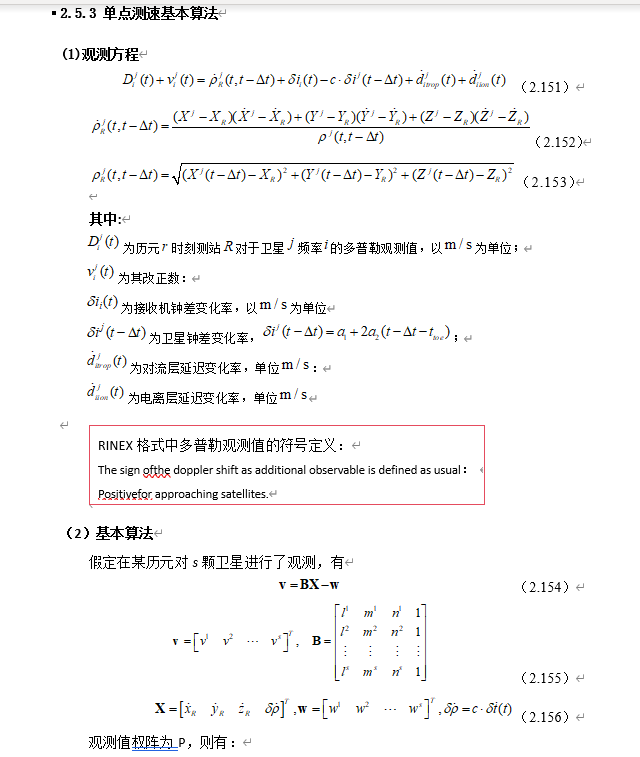
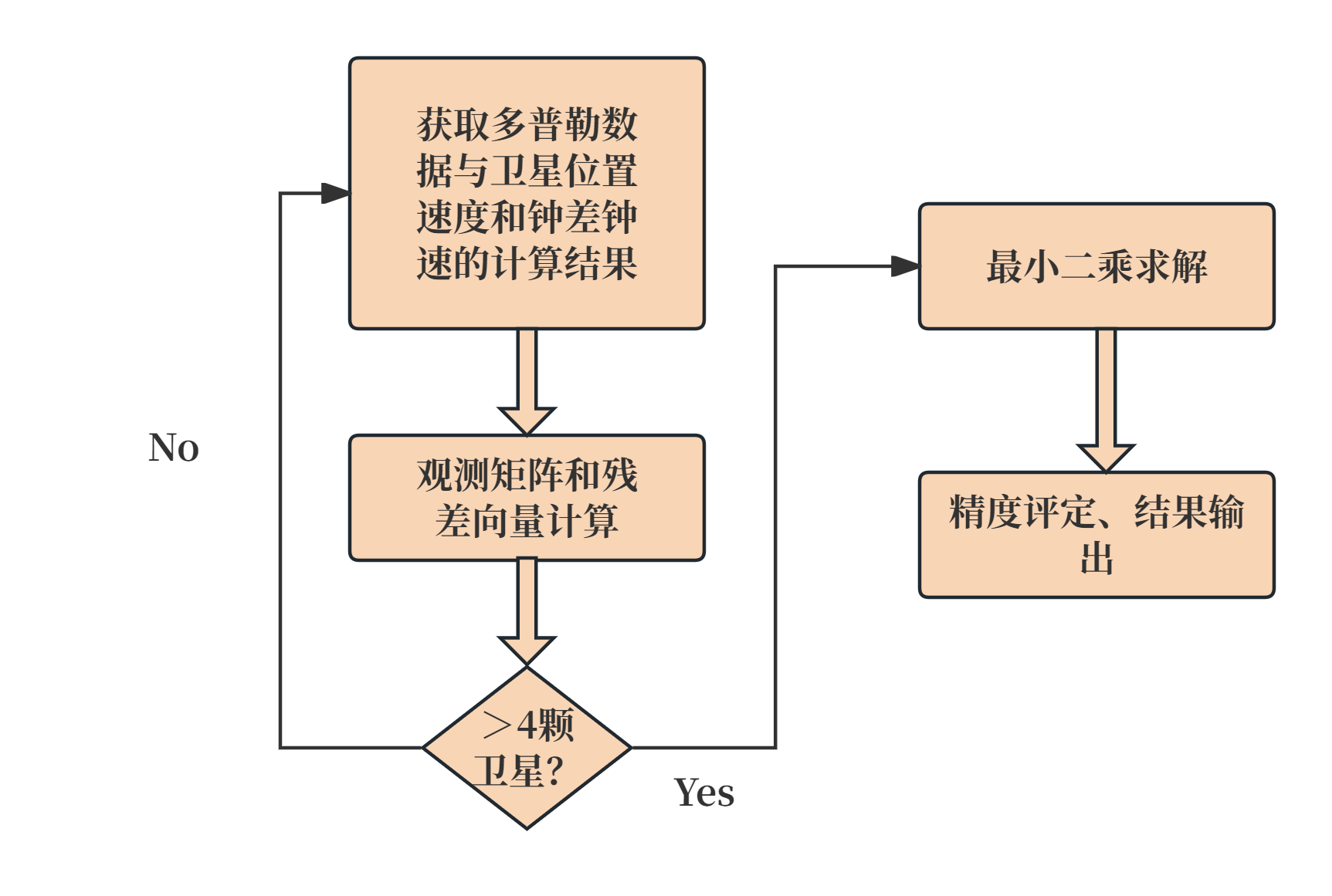
图8 单点测速
三、总结
文章所有代码已开源。欢迎大家和我交流