STM32CUBEIDE开发实战:ADC与UART应用
使用STM32CUBEIDE对蓝桥杯嵌入式芯片STM32G431进行开发 ,本次开发功能为PA1采集端口电压,并通过printf函数通过串口1实现发送电压数据。
配置如下:
拿官方hal库LCD的例程,直接使用ioc二次配置进行的开发。
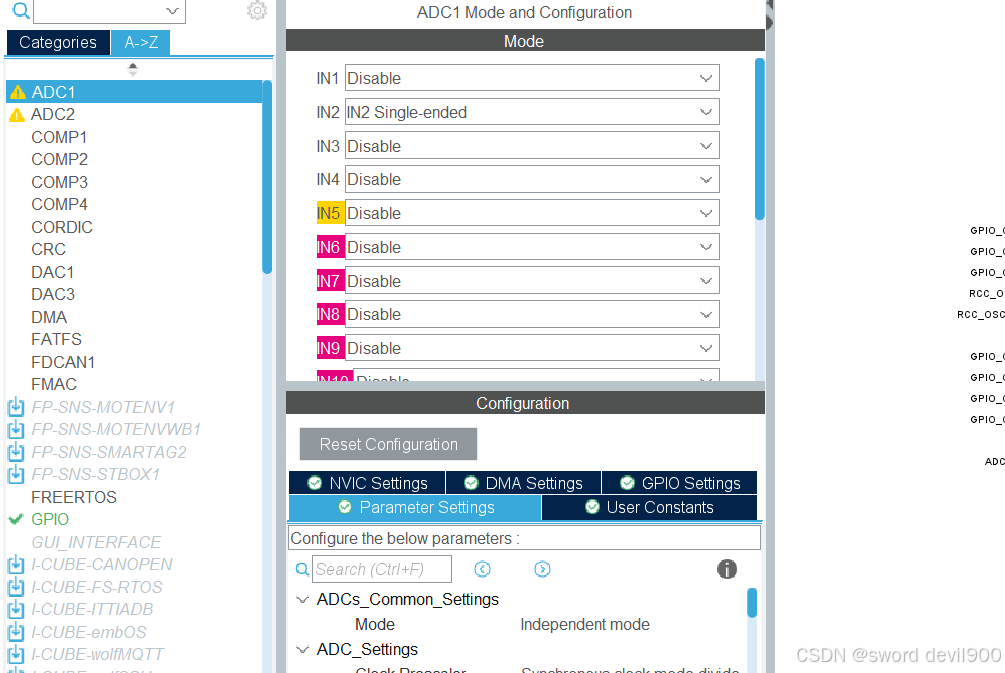
ADC端口配置
如下:
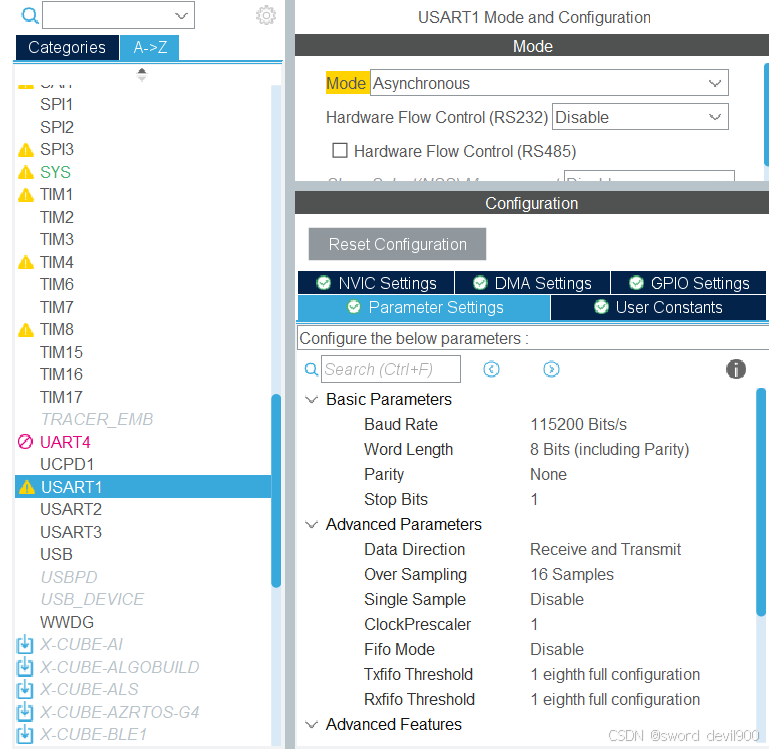
串口1配置
如下:
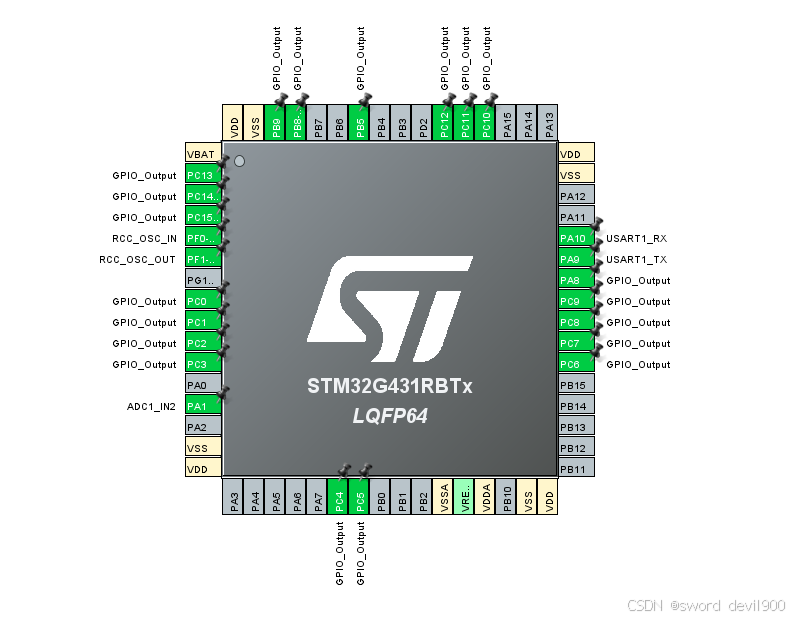
芯片引脚示意
代码
如下:
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2025 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h>
#include <string.h>
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
ADC_HandleTypeDef hadc1;UART_HandleTypeDef huart1;/* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC1_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_ADC1_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* USER CODE BEGIN WHILE */
while (1)
{HAL_ADC_Start(&hadc1);if(HAL_ADC_PollForConversion(&hadc1, 10) == HAL_OK){uint32_t adcValue = HAL_ADC_GetValue(&hadc1);float voltage = (adcValue * 3.3f) / 4096.0f;printf("ADC Value: %lu\tVoltage: %.2fV\r\n", adcValue, voltage);}HAL_Delay(200);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage*/HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK){Error_Handler();}
}/*** @brief ADC1 Initialization Function* @param None* @retval None*/
static void MX_ADC1_Init(void)
{/* USER CODE BEGIN ADC1_Init 0 *//* USER CODE END ADC1_Init 0 */ADC_MultiModeTypeDef multimode = {0};ADC_ChannelConfTypeDef sConfig = {0};/* USER CODE BEGIN ADC1_Init 1 *//* USER CODE END ADC1_Init 1 *//** Common config*/hadc1.Instance = ADC1;hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2;hadc1.Init.Resolution = ADC_RESOLUTION_12B;hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;hadc1.Init.GainCompensation = 0;hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;hadc1.Init.LowPowerAutoWait = DISABLE;hadc1.Init.ContinuousConvMode = DISABLE;hadc1.Init.NbrOfConversion = 1;hadc1.Init.DiscontinuousConvMode = DISABLE;hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;hadc1.Init.DMAContinuousRequests = DISABLE;hadc1.Init.Overrun = ADC_OVR_DATA_PRESERVED;hadc1.Init.OversamplingMode = DISABLE;if (HAL_ADC_Init(&hadc1) != HAL_OK){Error_Handler();}/** Configure the ADC multi-mode*/multimode.Mode = ADC_MODE_INDEPENDENT;if (HAL_ADCEx_MultiModeConfigChannel(&hadc1, &multimode) != HAL_OK){Error_Handler();}/** Configure Regular Channel*/sConfig.Channel = ADC_CHANNEL_2;sConfig.Rank = ADC_REGULAR_RANK_1;sConfig.SamplingTime = ADC_SAMPLETIME_2CYCLES_5;sConfig.SingleDiff = ADC_SINGLE_ENDED;sConfig.OffsetNumber = ADC_OFFSET_NONE;sConfig.Offset = 0;if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK){Error_Handler();}/* USER CODE BEGIN ADC1_Init 2 *//* USER CODE END ADC1_Init 2 */}/*** @brief USART1 Initialization Function* @param None* @retval None*/
static void MX_USART1_UART_Init(void)
{/* USER CODE BEGIN USART1_Init 0 *//* USER CODE END USART1_Init 0 *//* USER CODE BEGIN USART1_Init 1 *//* USER CODE END USART1_Init 1 */huart1.Instance = USART1;huart1.Init.BaudRate = 115200;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_TX_RX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;huart1.Init.ClockPrescaler = UART_PRESCALER_DIV1;huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_RXOVERRUNDISABLE_INIT|UART_ADVFEATURE_DMADISABLEONERROR_INIT;huart1.AdvancedInit.OverrunDisable = UART_ADVFEATURE_OVERRUN_DISABLE;huart1.AdvancedInit.DMADisableonRxError = UART_ADVFEATURE_DMA_DISABLEONRXERROR;if (HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}if (HAL_UARTEx_SetTxFifoThreshold(&huart1, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK){Error_Handler();}if (HAL_UARTEx_SetRxFifoThreshold(&huart1, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK){Error_Handler();}if (HAL_UARTEx_DisableFifoMode(&huart1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN USART1_Init 2 *//* USER CODE END USART1_Init 2 */}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* USER CODE BEGIN MX_GPIO_Init_1 *//* USER CODE END MX_GPIO_Init_1 *//* GPIO Ports Clock Enable */__HAL_RCC_GPIOC_CLK_ENABLE();__HAL_RCC_GPIOF_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3|GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7|GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12, GPIO_PIN_RESET);/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_RESET);/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5|GPIO_PIN_8|GPIO_PIN_9, GPIO_PIN_RESET);/*Configure GPIO pins : PC13 PC14 PC15 PC0PC1 PC2 PC3 PC4PC5 PC6 PC7 PC8PC9 PC10 PC11 PC12 */GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3|GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7|GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);/*Configure GPIO pin : PA8 */GPIO_InitStruct.Pin = GPIO_PIN_8;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/*Configure GPIO pins : PB5 PB8 PB9 */GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_8|GPIO_PIN_9;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/* USER CODE BEGIN MX_GPIO_Init_2 *//* USER CODE END MX_GPIO_Init_2 */
}/* USER CODE BEGIN 4 */
int _write(int file, char *ptr, int len)
{HAL_UART_Transmit(&huart1, (uint8_t *)ptr, len, HAL_MAX_DELAY);return len;
}
/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
编译ok
暂时没有实物,无法验证,功能是否正常。