FoMo 数据集是一个专注于机器人在季节性积雪变化环境中的导航数据集,记录了不同季节(无雪、浅雪、深雪)下的传感器数据和轨迹信息。
2025-05-02,由加拿大拉瓦尔大学北方机器人实验室和多伦多大学机器人研究所联合创建的 FoMo 数据集,目的是研究机器人在季节性积雪变化环境中的导航能力。该数据集的意义在于填补了机器人在极端季节变化(如积雪深度变化)下的导航研究空白,为开发更可靠的机器人导航系统提供了宝贵的数据支持。
一、研究背景
Teach and Repeat(T&R)是一种依靠人类专家驾驶初始路径,随后机器人自主重复该轨迹的导航框架。它在多种平台上取得了成功,但在季节性变化显著的环境中(如积雪覆盖的森林),其性能仍面临挑战。
目前遇到的困难和挑战:
1、环境变化的适应性:季节性积雪覆盖导致地形和传感器读数发生显著变化,机器人难以在不同季节重复相同的轨迹。
2、传感器性能的局限性:雷达和激光雷达等传感器在积雪深度变化时的定位能力受到限制,尤其是在地形起伏较大或积雪高度变化时。
3、控制和动力问题:机器人在积雪覆盖的地形中行驶时,动力消耗增加,且难以执行复杂的动作(如原地转弯)。
数据集地址:FoMo数据集|机器人导航数据集|季节性变化数据集
二、让我们一起来看一下FoMo 数据集
FoMo 数据集是一个专注于机器人在季节性积雪变化环境中的导航数据集,记录了不同季节(无雪、浅雪、深雪)下的传感器数据和轨迹信息。
FoMo 数据集记录了机器人在加拿大魁北克蒙特莫伦西森林中的行驶轨迹,包括激光雷达(Lidar)、雷达(FMCW Radar)、IMU 和轮速编码器等多种传感器数据。数据采集时间为冬季,覆盖了从无积雪到超过 1 米深积雪的季节变化。
数据集构建:
数据集通过 Clearpath Robotics Warthog 无人地面车辆(UGV)采集,车辆配备了 RoboSense RS-128 激光雷达、Navtech CIR-304 雷达、VectorNav VN-100 IMU 和多个 Emlid M2 GNSS 接收器。数据采集时间跨越了 11 月到次年 3 月,记录了不同季节的环境变化。
数据集特点:
1、多季节覆盖:数据集包含了从无积雪到深雪覆盖的多种季节场景。
2、多传感器融合:同时记录了激光雷达、雷达和 IMU 等多种传感器数据。
3、高动态环境:机器人在积雪覆盖的森林中行驶,地形起伏大,车辆姿态变化显著。
数据集使用方法
研究人员可以利用该数据集测试机器人在季节性变化环境中的导航算法,评估雷达和激光雷达在积雪覆盖地形下的定位能力,以及开发针对复杂地形的动力和控制策略。
基准测试总结
在 FoMo 数据集的初步测试中,雷达 Teach and Repeat(RT&R)在积雪深度变化较小的情况下表现良好,但在积雪深度超过 1 米时,定位成功率仅为 60%;激光雷达 Teach and Repeat(LT&R)在去除地面点后表现更优,但对高积雪障碍物的适应性仍有待提高。
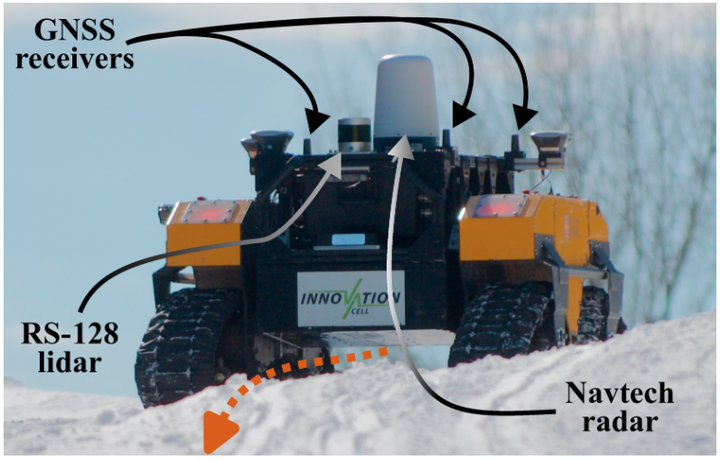
我们的数据采集平台位于魁北克省的 Montmorency 森林,实验在此进行。我们使用来自激光雷达和雷达传感器的状态估计来测试 Teach and Repeat 框架。
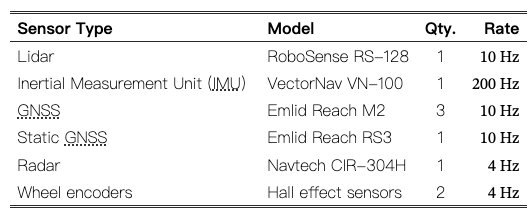
传感器规格
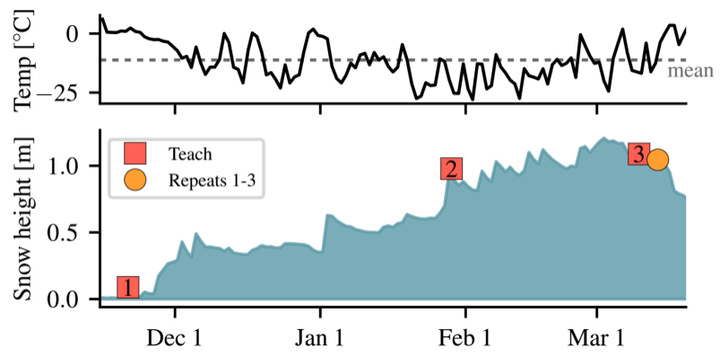
在 Montmorency 森林实验站 11 月至 3 月期间的平均每日温度和累积积雪。11 月的初始教学录制没有积雪覆盖,到 3 月实验时,积雪深度已达到 1 m 。平均温度,用虚线表示,在此期间为 −11.46 °C 。

报告的自主率是根据轨迹重复持续时间计算的,而路径长度来自 GNSS 数据。
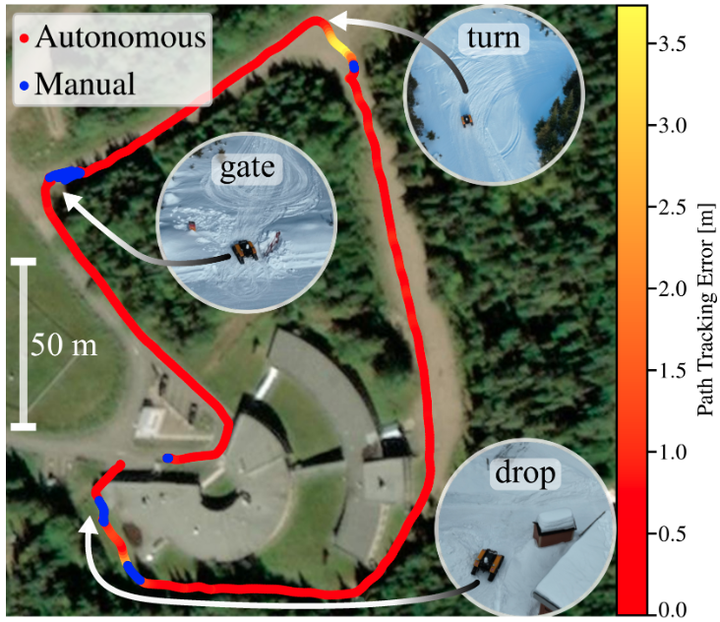
在 1 月份记录并在 3 月份重复的蓝色轨迹上的路径跟踪误差。轨迹的蓝色部分对应于机器人手动控制的数据点。照片插图显示了轨迹上的难点。在门口,机器人从铲雪路过渡到森林小径,穿过狭窄的门口,爬上雪堆。在转弯处,机器人大约在 90 ° 的雪中转弯。
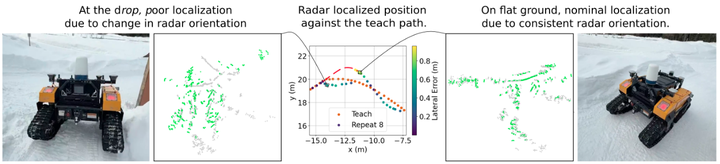
当战象无人地面车通过下坡(左侧)和铲雪道路(右侧)时,雷达定位的比较。每个位置的实时雷达扫描以绿色显示,与灰色的局部子图相比。实时扫描和地图在下坡处错位,但在平坦地面上对齐良好。中间面板显示,定位估计在道路右侧是错误的,导致机器人偏离道路(以虚线红色显示)。
三、FoMo数据集应用场景
案例:机器人在深雪覆盖的陡坡上保持稳定的控制策略优化
假设我们有一个机器人小k,它需要在深雪覆盖的陡坡上行驶。这种场景特别复杂,因为积雪会让地面变得滑,而且陡坡会让机器人的重心不稳,很容易翻车。FoMo数据集里正好有这种场景的数据,我们可以用它来优化机器人的控制策略。
1. 分析数据集
FoMo数据集记录了机器人在不同季节(包括深雪覆盖的冬季)的行驶数据。我们先把这些数据拿出来,看看机器人在陡坡上的表现。发现几个问题:一是机器人在上坡时,车头容易抬得太高,导致前轮抓地力不足;二是下坡时,车尾容易翘起,容易失控。
2. 设计控制策略
我们决定用一种叫“自适应控制”的方法。这种控制策略很聪明,它可以根据不同的环境自动调整机器人的行为。具体来说,我们给机器人设计了两个控制策略:
上坡策略:当机器人检测到前方是陡坡时,它会自动降低速度,同时调整车身姿态,让车头稍微低一点,增加前轮的抓地力。
下坡策略:下坡时,机器人会自动调整重心,让车尾更稳,同时控制刹车力度,防止速度过快。
3. 模拟测试
在正式让机器人去爬坡之前,我们先用计算机模拟测试一下。我们把FoMo数据集里的地形数据输入到模拟环境中,让机器人在虚拟的陡坡上行驶。测试结果还不错,机器人在上坡和下坡时都能保持稳定,没有出现翻车的情况。
4. 实地测试
模拟测试通过后,我们把机器人带到真实的深雪陡坡上进行测试。测试过程中,机器人表现得很棒。上坡时,它按照我们设计的策略,速度控制得很好,车头也没有抬得过高;下坡时,车尾也很稳,没有出现失控的情况。通过FoMo数据集的帮助,我们成功优化了机器人在深雪陡坡上的控制策略。
通过这个案例,我们可以看到FoMo数据集在帮助机器人优化控制策略方面的作用。它不仅提供了丰富的场景数据,还让我们能够在虚拟环境中先进行测试,减少了实地测试的风险。
更多开源的数据集,请打开:遇见数据集
遇见数据集-让每个数据集都被发现,让每一次遇见都有价值。遇见数据集,领先的千万级数据集搜索引擎,实时追踪全球数据集,助力把握数据要素市场。![]() https://www.selectdataset.com/
https://www.selectdataset.com/