UE5 诺伊腾动捕使用笔记
AxisStudio使用说明
诺伊腾动捕有两个软件,分别是AxisStudio和Axis Post
打开软件后选择"工程"
分为两种工程,一种是PN Studio和PN3,这两个工程对于不同的骨骼方式(也可以修改)
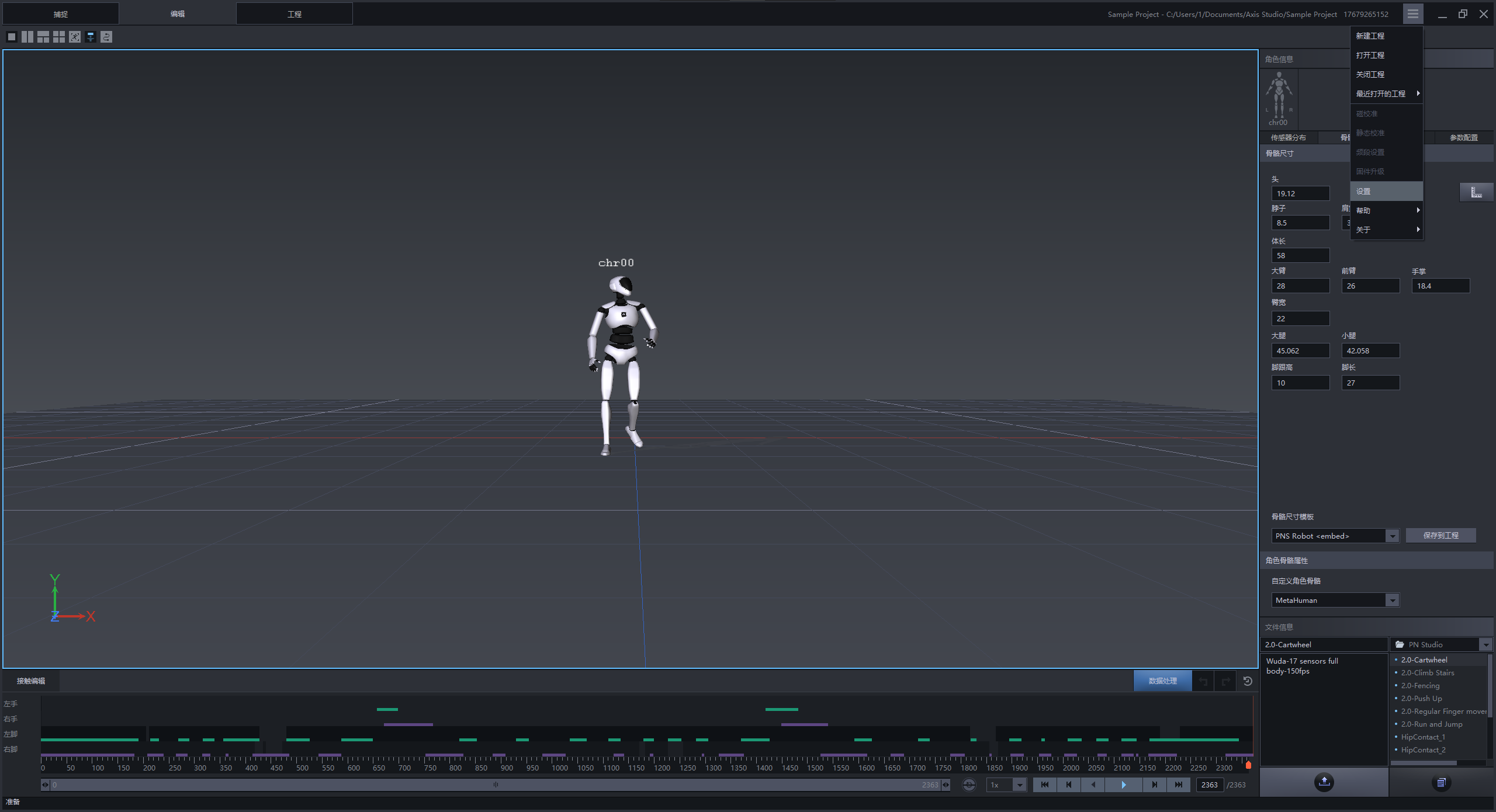
以PNStudio的2.0-Carwheel举例
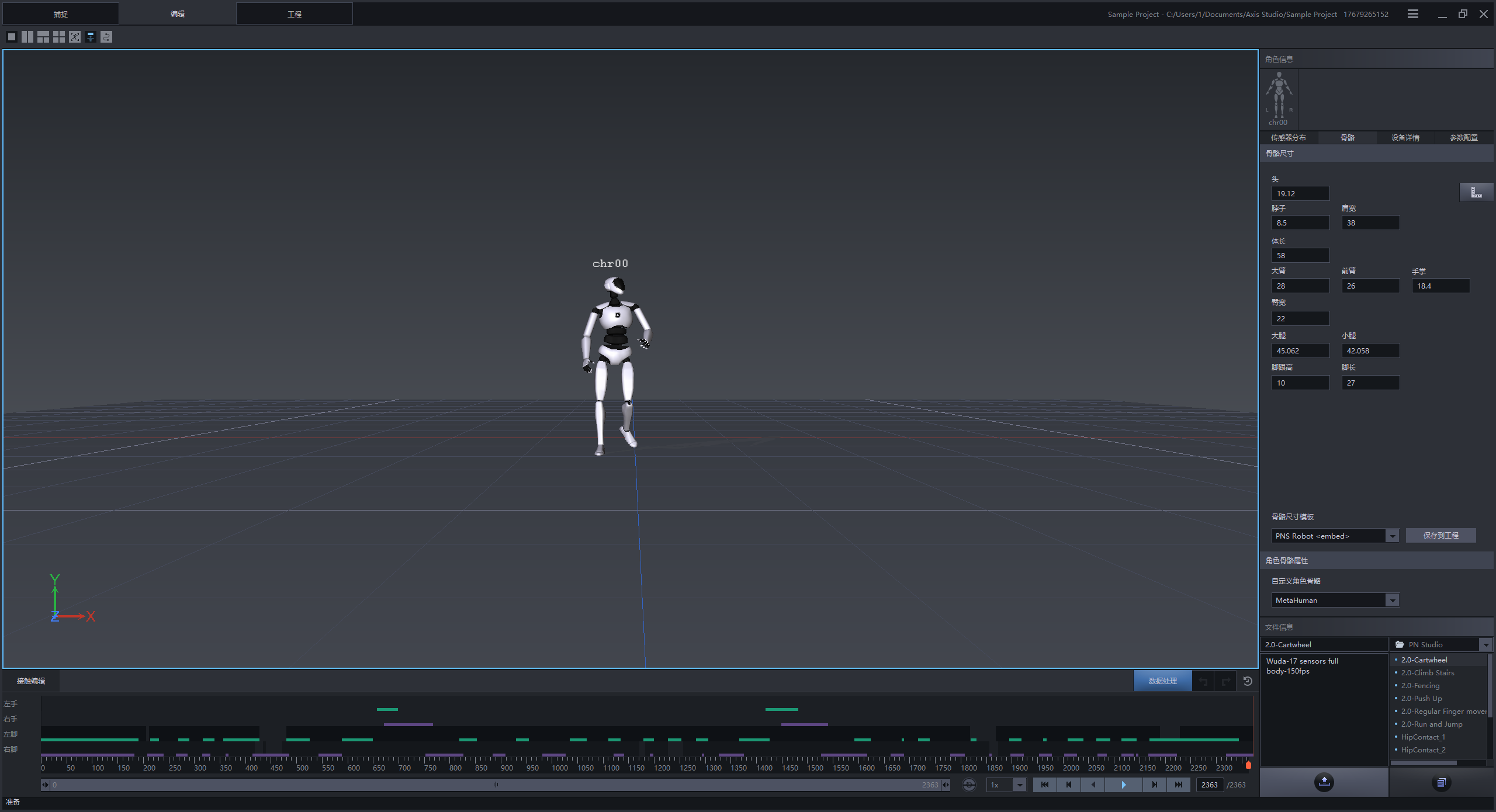
右侧的数据为你的目标骨骼的尺寸,例如我现在是Metahuman的骨骼,那么右边的数据就是Metahuman骨骼的数据
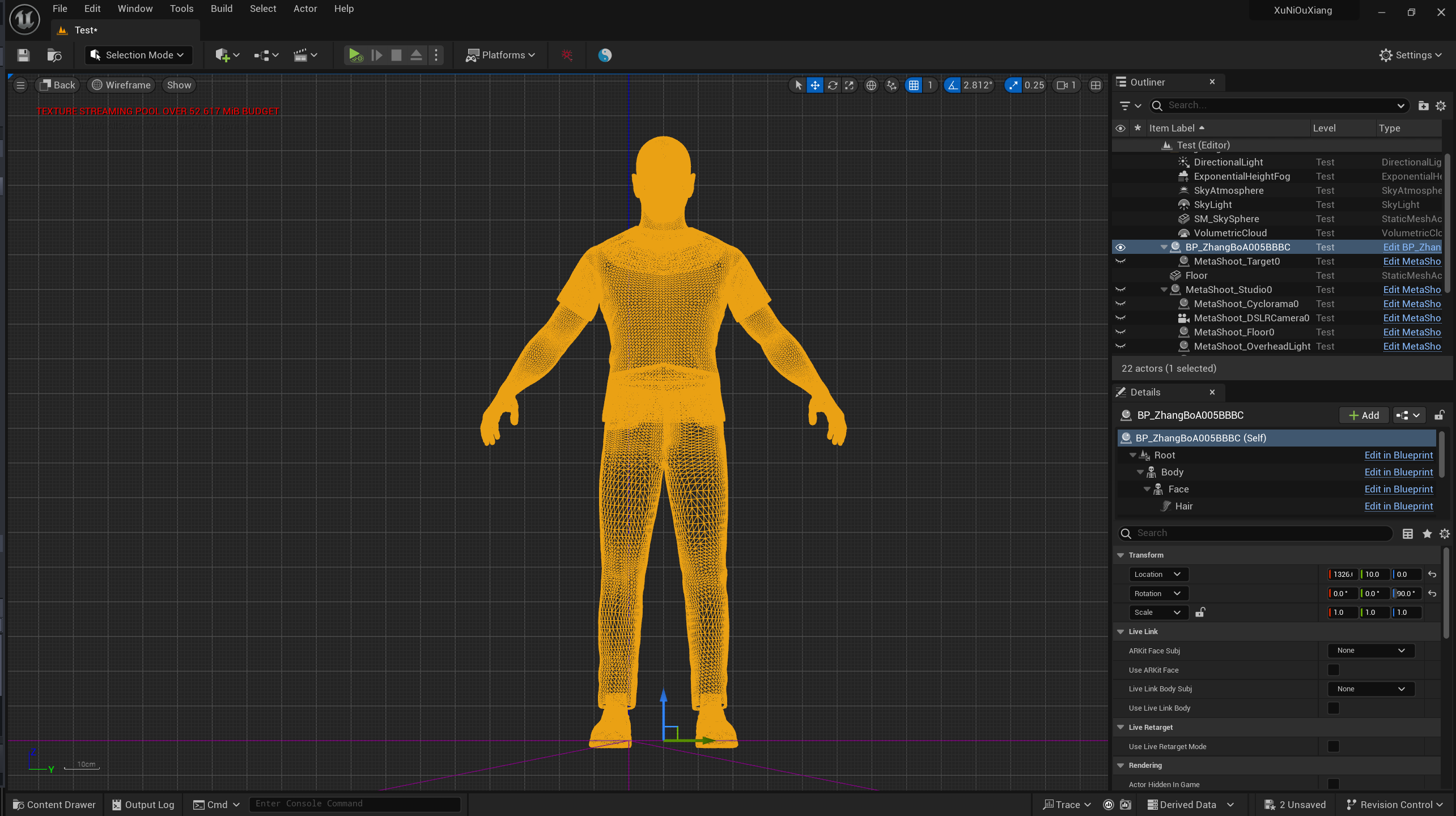
具体数据可以在UE内切换为线段模式,并且选择一个平面视图,按住鼠标中键测量
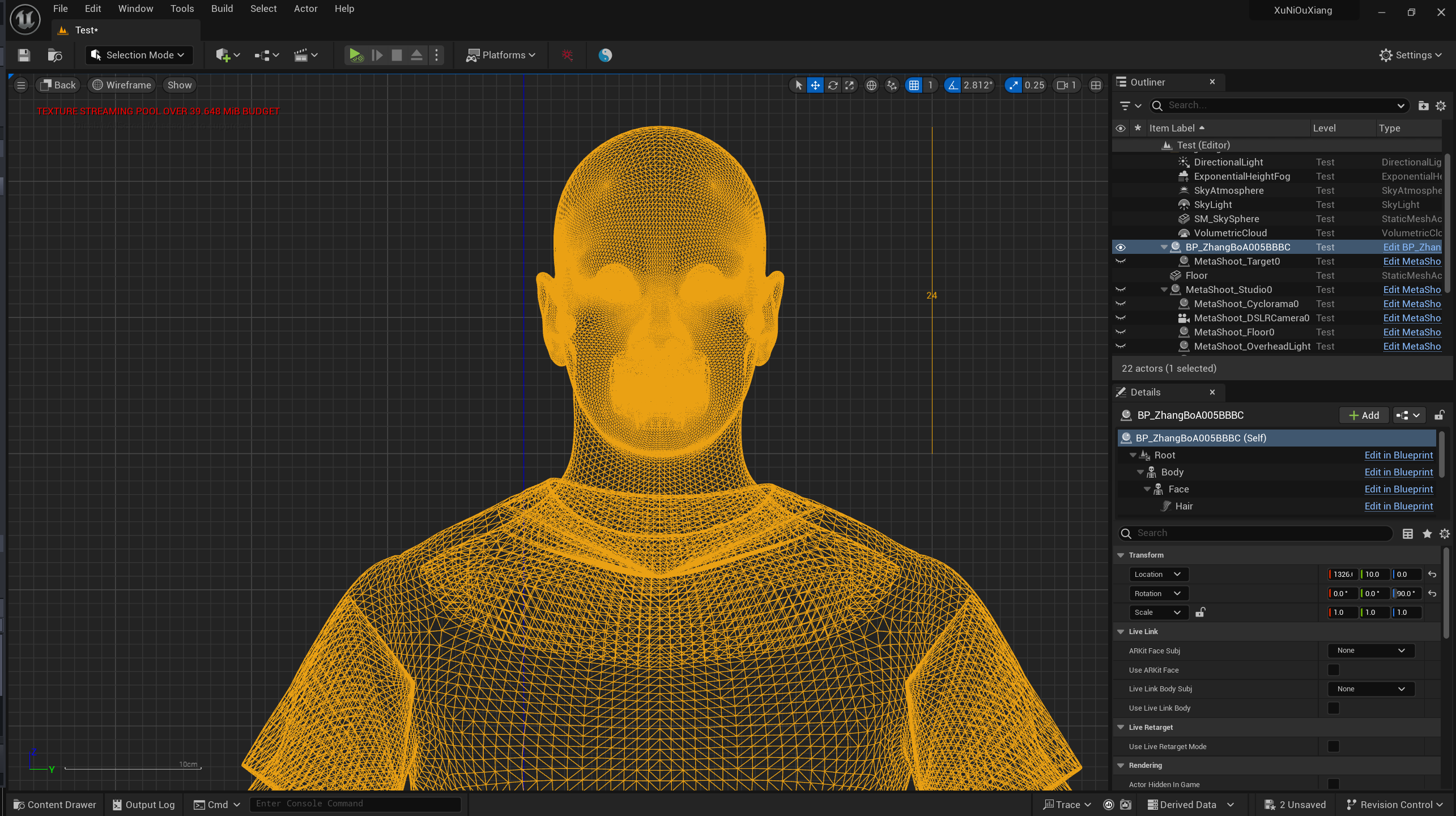
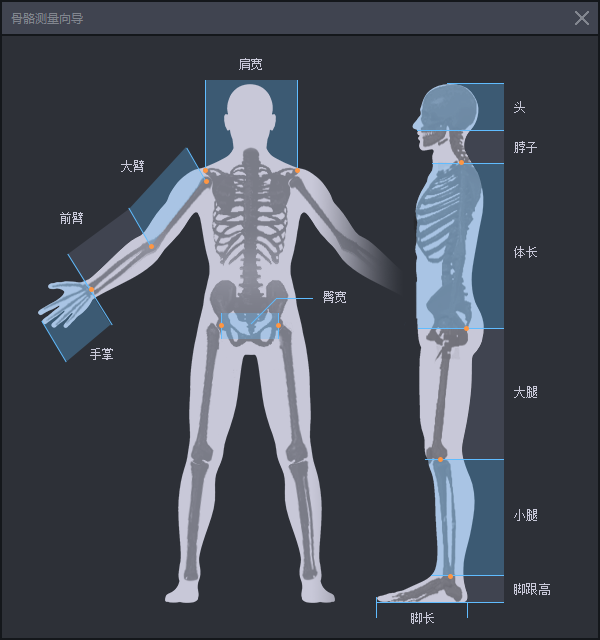
具体尺寸表点击AxisStudio内的刻度尺图标可以看见
![]()
测量结束后在尺寸模板这里选择PNSRobot

然后在角色骨骼属性这里有几种方式
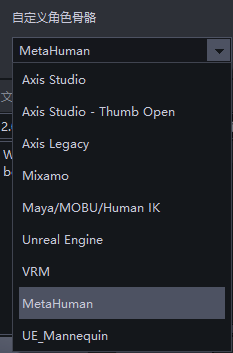
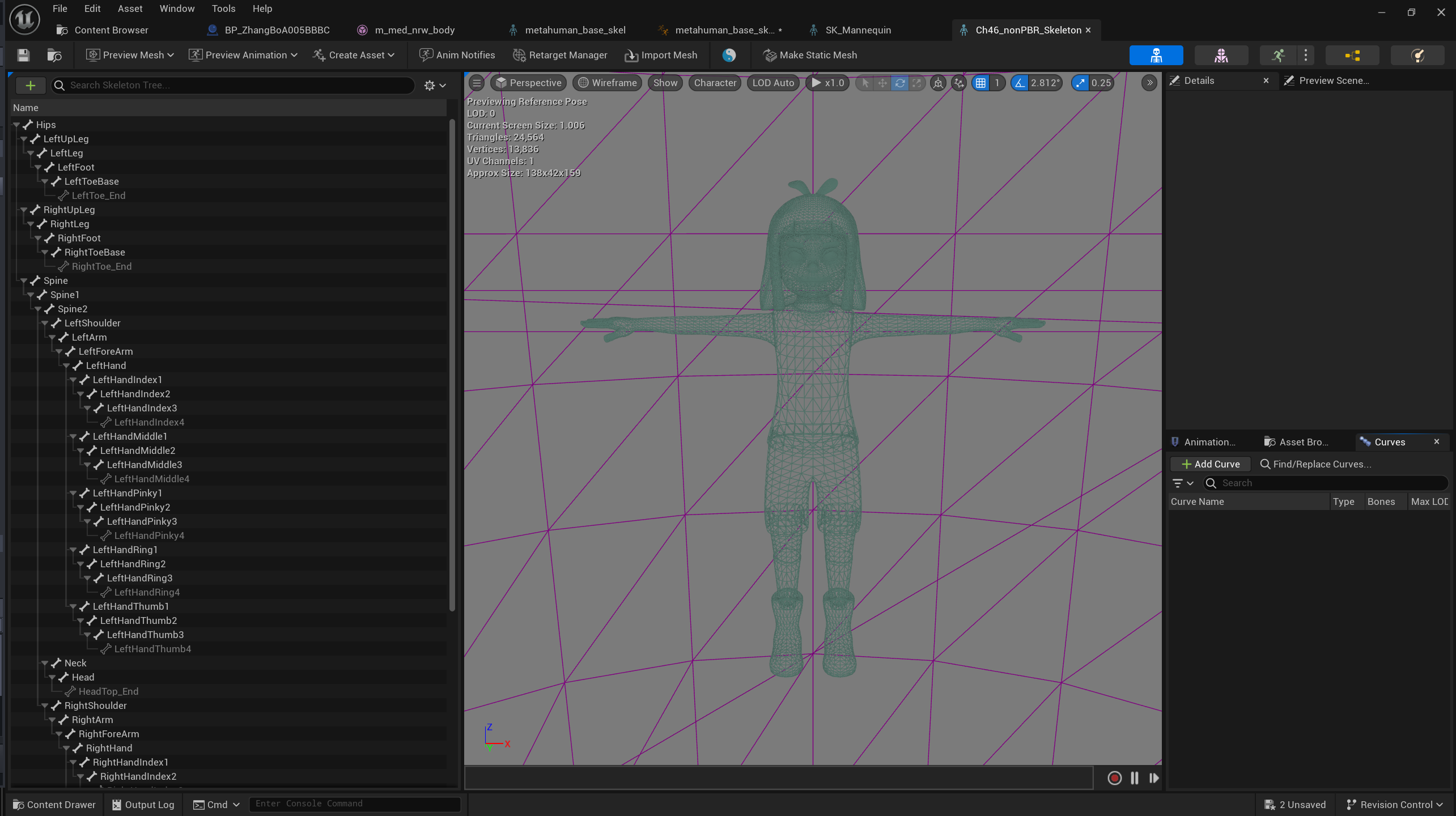
MetaHuman
这种就很简单,只要你UE使用的是Metahuman骨骼就可以
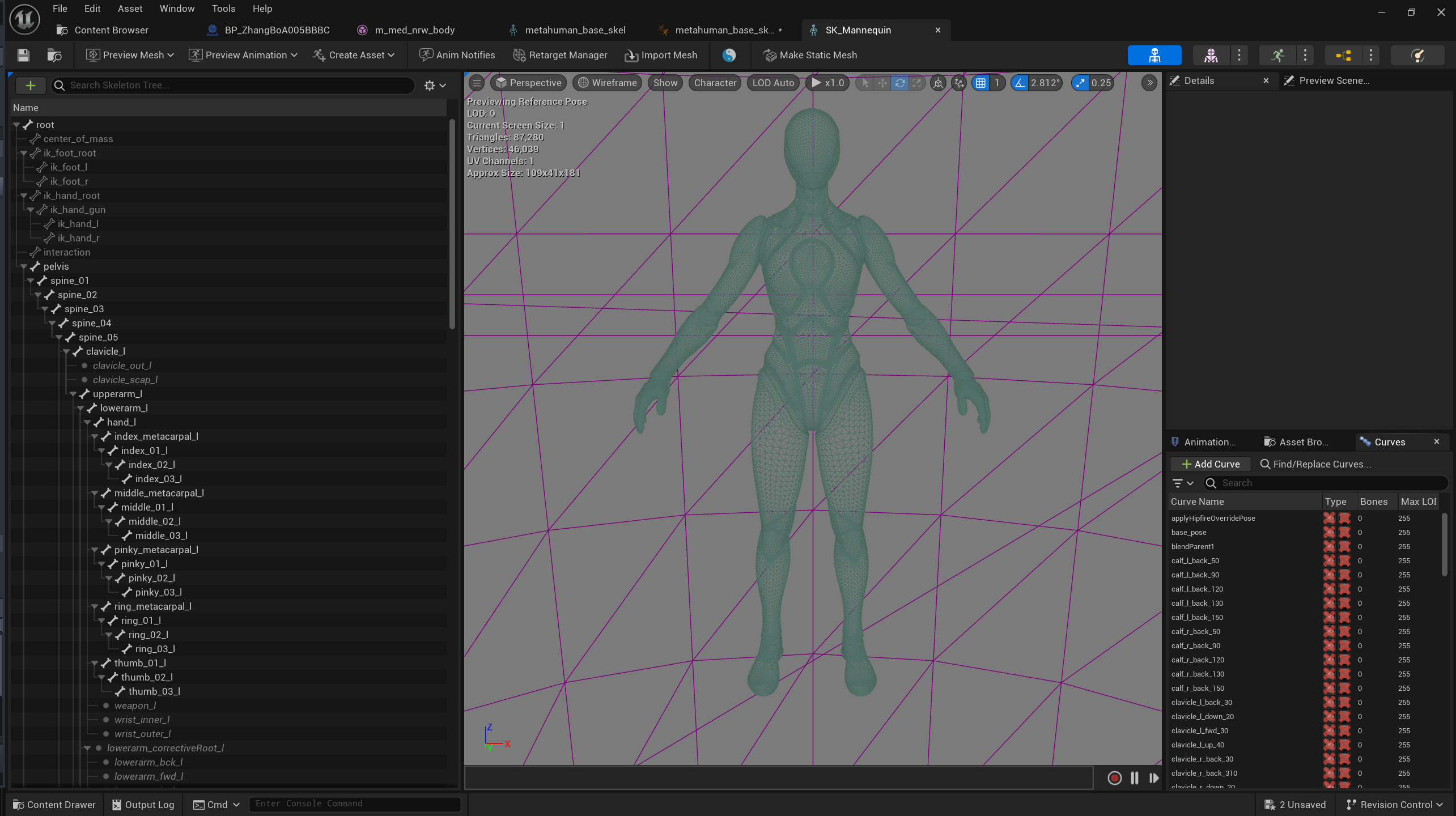
UE_Mannequin
这种也很简单,只需要是UE官方的SK_Mannequin骨骼就可以
Mixamo
这种是Mixamo的骨骼,需要从Mixamo上下载指定模型
Axis Studio
这种就是自定义的骨骼,这种骨骼需要你把角色设置成T字Pose,两根大拇指需要指甲盖朝上并设置动画序列帧.同时你需要额外使用Axis Post做额外的动作融合,这个在后面Axis Post软件一起讲
选择骨骼完成
在右上角的设置内选择BVH广播
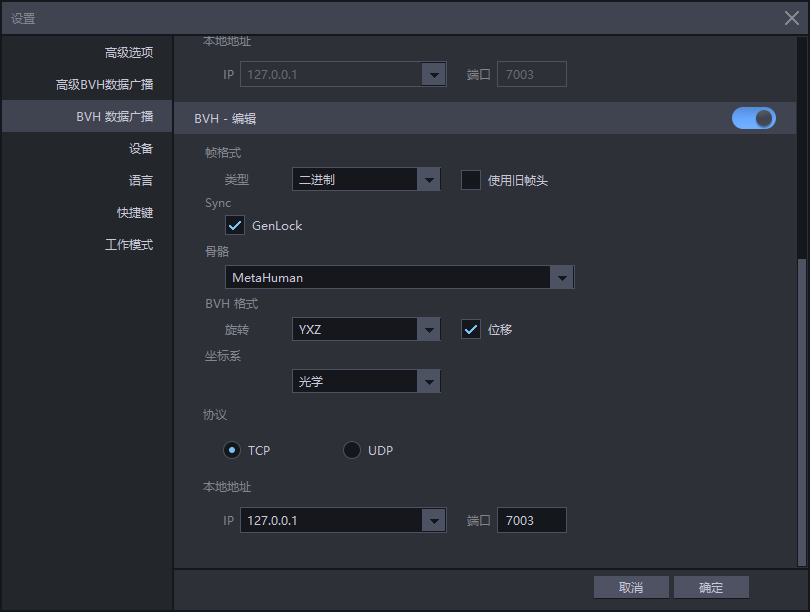
这里一般不用修改,只需要修改骨骼就可以
UE5
首先安装插件
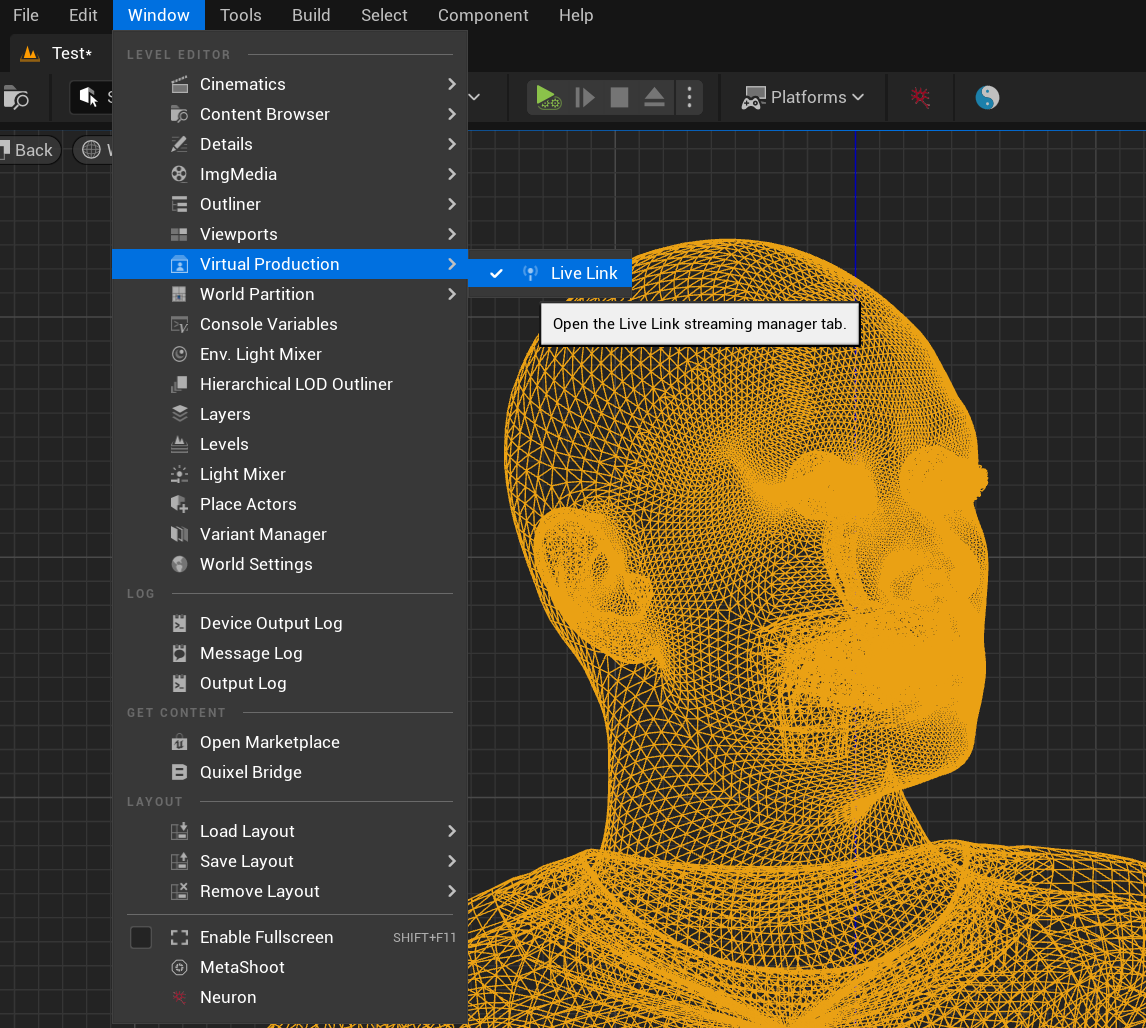
在Windows→Virtual Production→Live Link
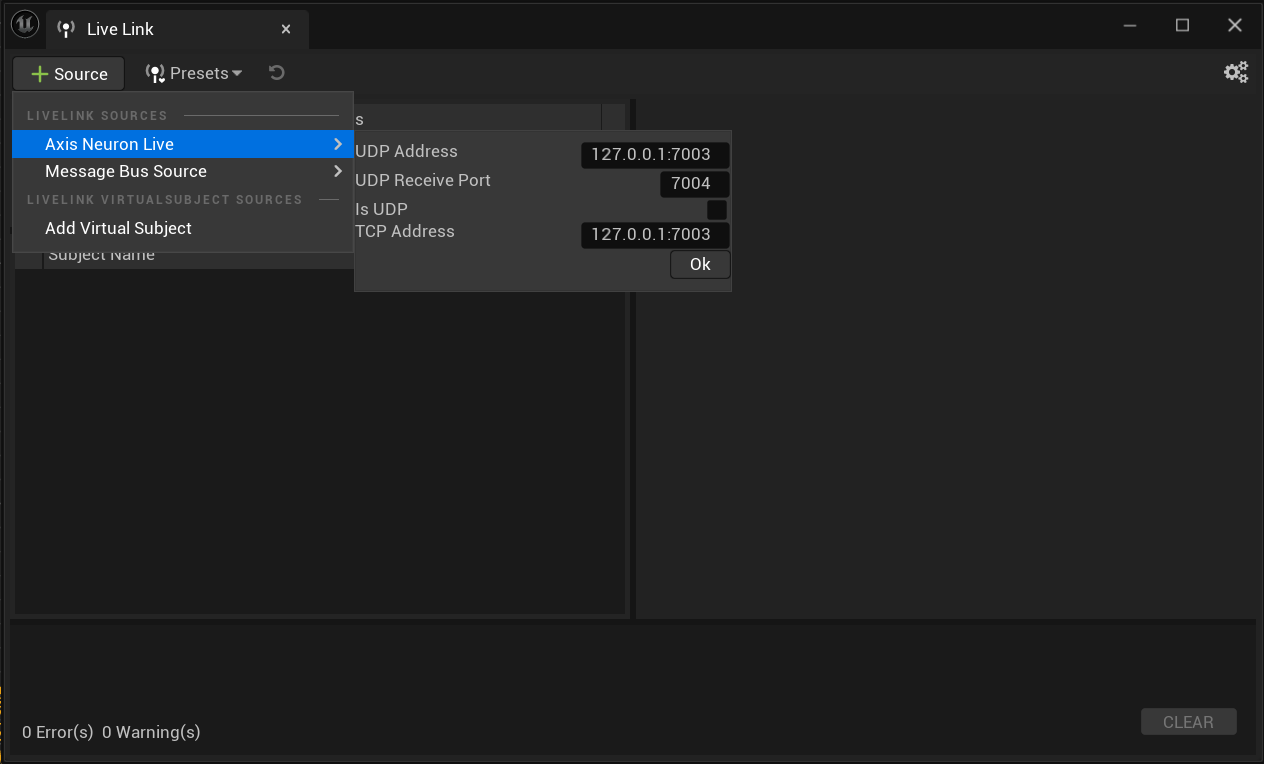
在这里添加一个Asix的数据源,注意不适用UDP,使用TCP链接
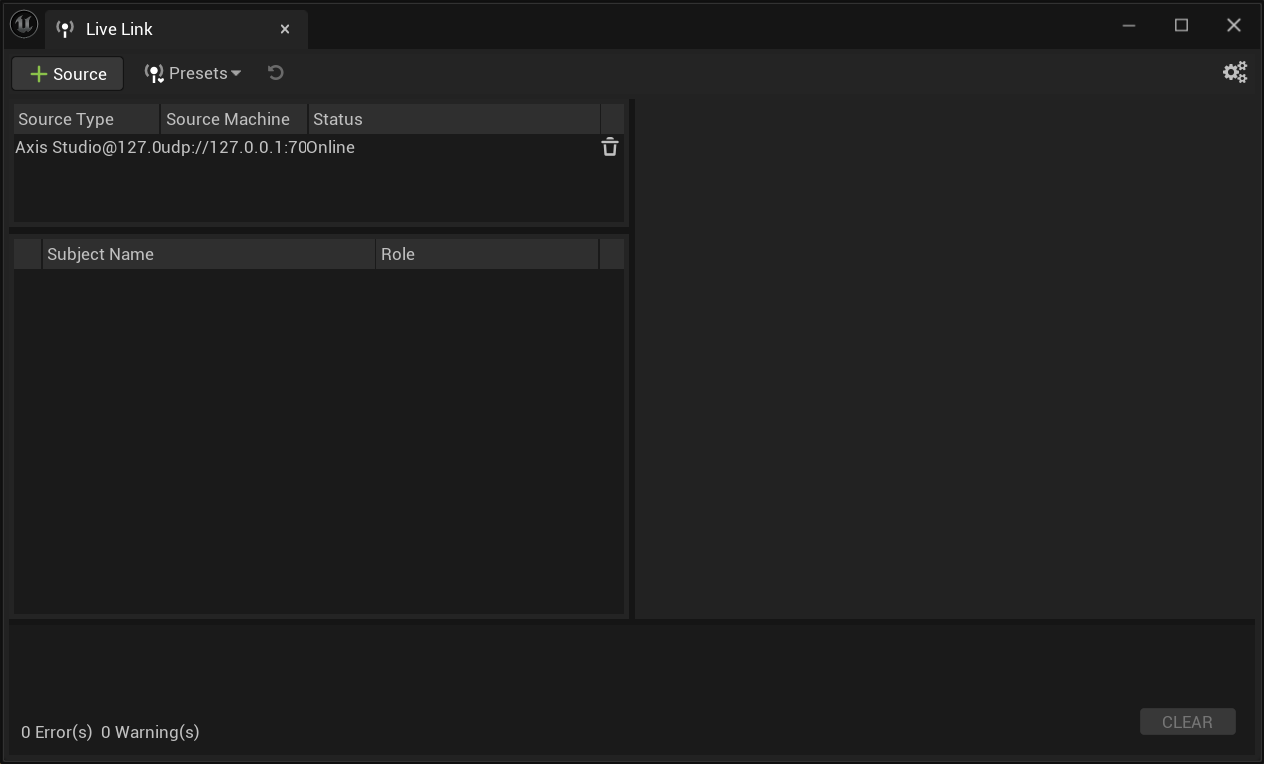
新建完成后点击左边Axis Studio的开始播放,这里就会出现Char00(Axis Studio的角色名)
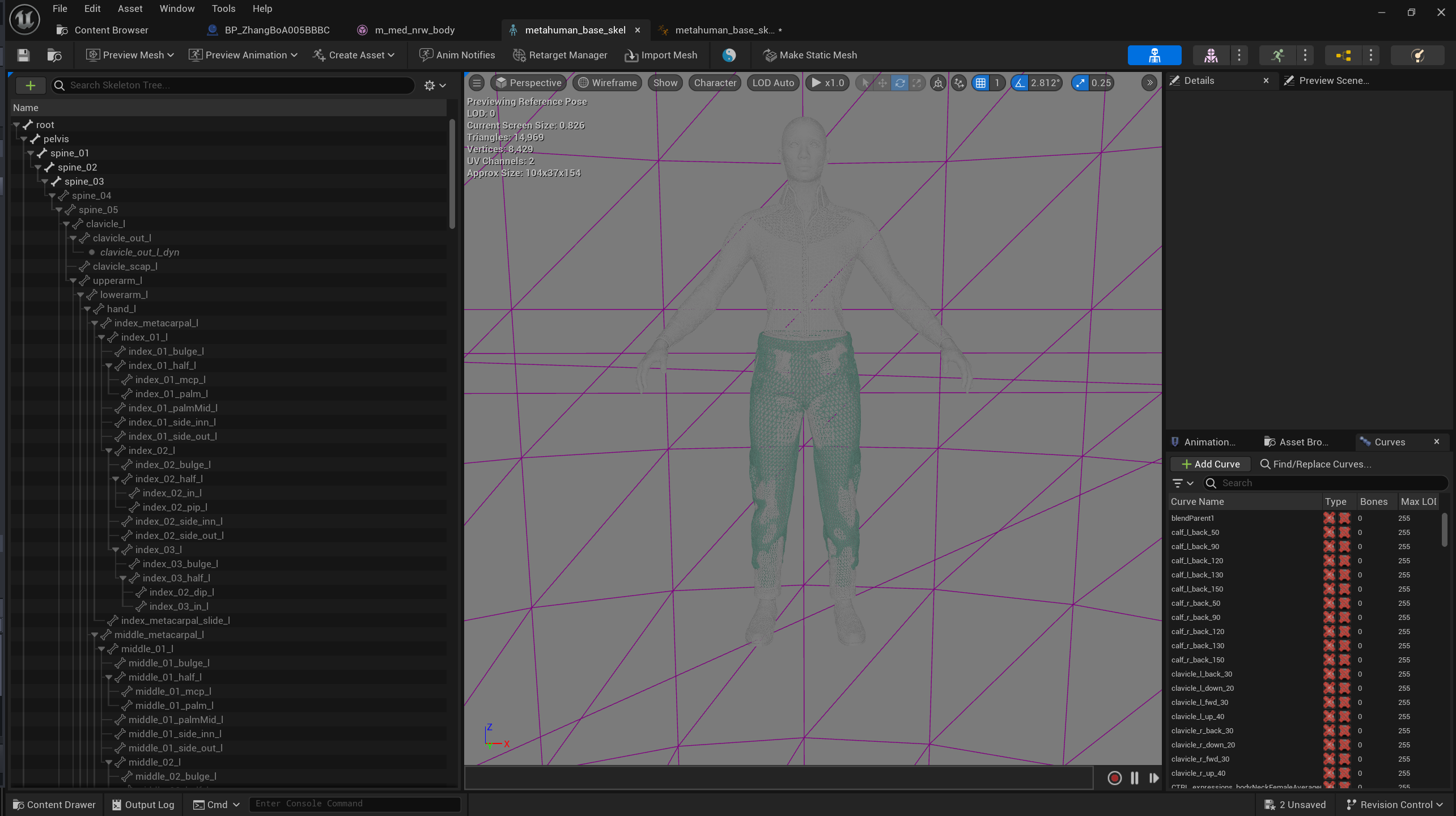
使用Metahuman的身体骨骼新建动画蓝图,
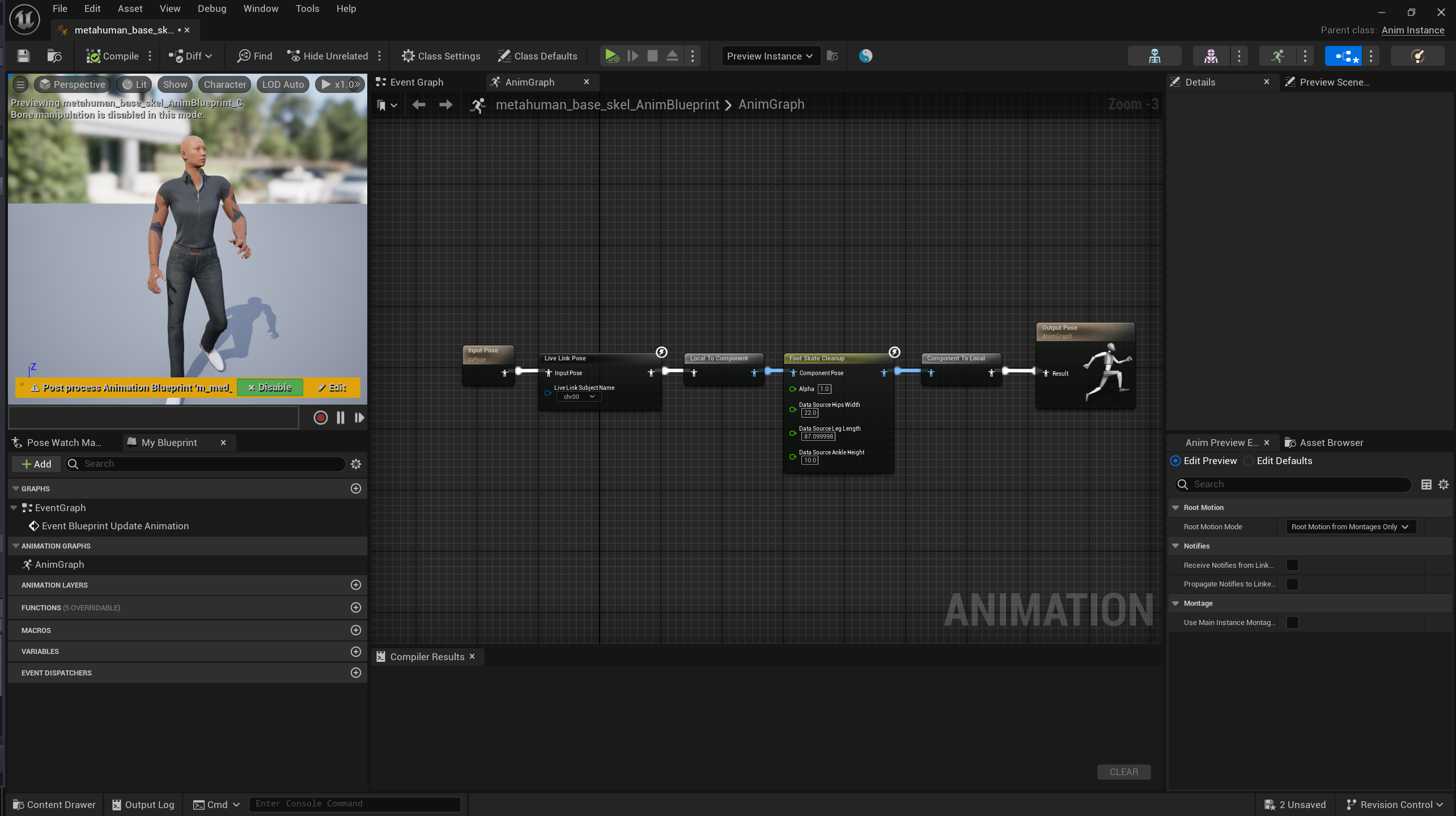
在LiveLink的Retarget内选择Metahumans_Remap
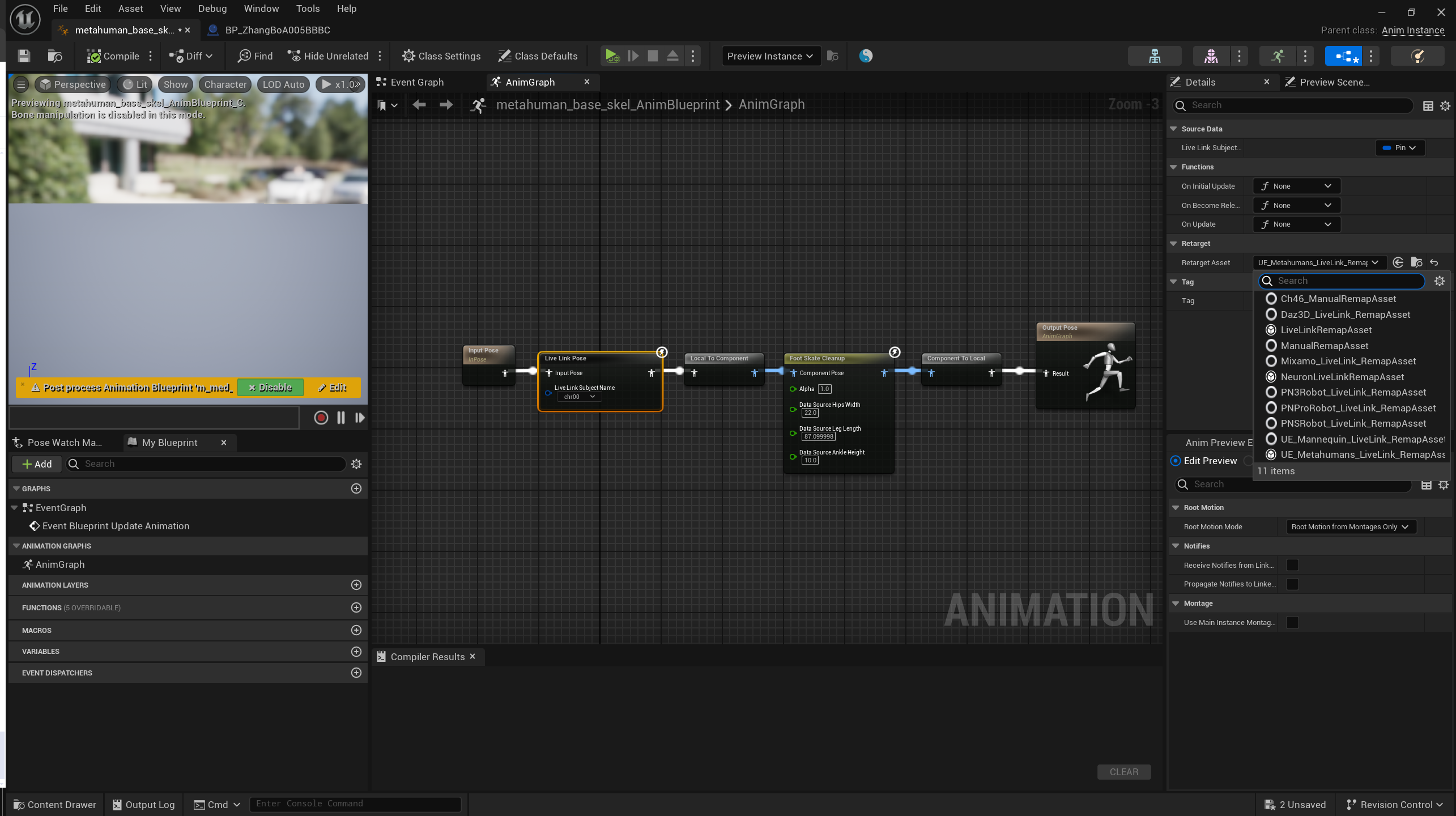
Axis Sudio就可以连接上UE了
使用AxisPost进行AxisStudio的自定义角色源
这部分比较复杂,需要用axispost对Studio中转一次再输出给UE