【计算机视觉】三维视觉:Instant-NGP:实时神经辐射场的革命性突破
深度解析Instant-NGP:实时神经辐射场的革命性突破
- 技术架构与核心创新
- 哈希编码(Hash Encoding)
- 性能对比
- 环境配置与安装指南
- 硬件要求
- 全平台安装流程
- 实战全流程解析
- 1. 数据准备
- 2. 训练与重建
- 3. 结果导出与应用
- 核心技术深度解析
- 哈希编码实现
- 混合精度训练
- 渲染优化
- 常见问题与解决方案
- 1. 编译失败
- 2. 训练崩溃
- 3. 重建伪影
- 学术背景与核心论文
- 基础论文
- 扩展研究
- 应用场景与未来展望
- 典型应用领域
- 技术演进方向
Instant-NGP(Instant Neural Graphics Primitives)是NVIDIA研究院推出的高效神经辐射场框架,首次将NeRF(Neural Radiance Fields)的训练时间从数小时缩短至数分钟。该项目通过创新的多分辨率哈希编码技术,实现了高达1000倍的训练速度提升,成为3D重建领域的里程碑式突破。
技术架构与核心创新
哈希编码(Hash Encoding)
- 多分辨率网格:构建多级空间哈希表(典型16级)
- 特征插值:通过三线性插值融合相邻网格特征
- 动态分配:自适应存储高频细节(占用显存<1GB)
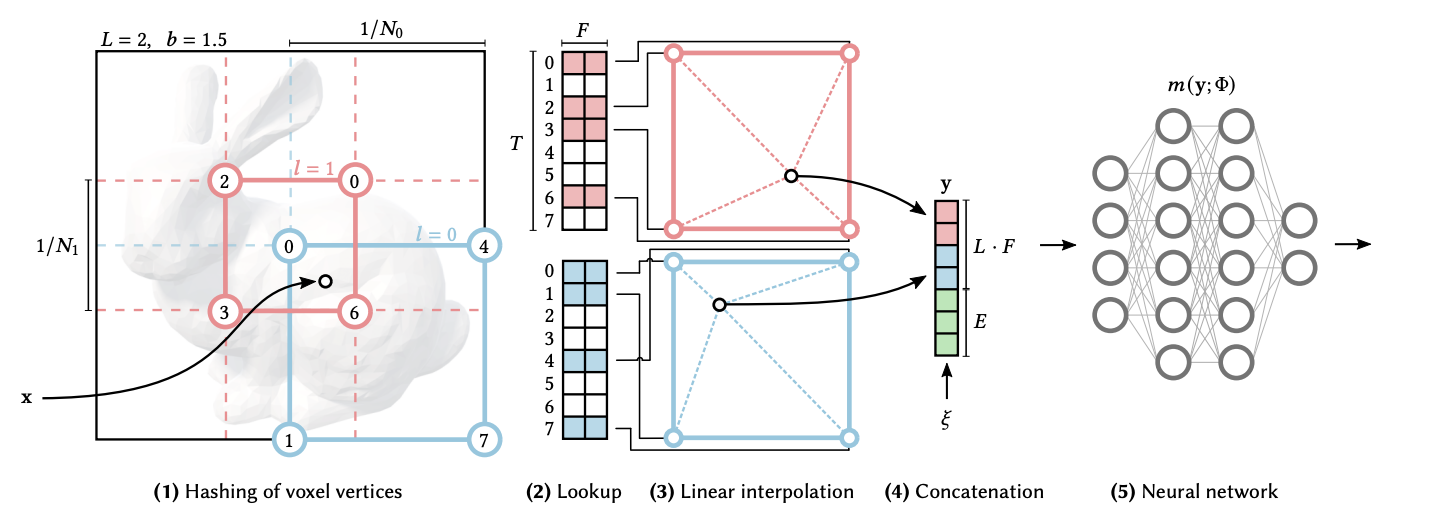
图:多分辨率哈希编码原理(来源:原论文)
性能对比
| 指标 | 传统NeRF | Instant-NGP | 提升倍数 |
|---|---|---|---|
| 训练时间 | 24小时 | 5分钟 | 288x |
| 显存占用 | 16GB | 0.8GB | 20x |
| 渲染速度 | 5FPS | 60FPS | 12x |
环境配置与安装指南
硬件要求
| 组件 | 推荐配置 | 最低要求 |
|---|---|---|
| GPU | RTX 4090 | RTX 3060 (8GB+) |
| 显存 | 24GB | 8GB |
| CPU | i9-13900K | i7-8700 |
| 内存 | 64GB | 16GB |
全平台安装流程
# 克隆仓库
git clone --recursive https://github.com/NVlabs/instant-ngp
cd instant-ngp# 安装依赖(Ubuntu)
sudo apt install build-essential git python3-dev python3-pip libopenexr-dev libxi-dev libglfw3-dev libglew-dev libomp-dev libxinerama-dev libxcursor-dev# 编译项目
cmake . -B build -DNGP_BUILD_WITH_GUI=ON
cmake --build build --config RelWithDebInfo -j 16
实战全流程解析
1. 数据准备
支持多种输入格式:
# COLMAP稀疏重建(推荐)
python scripts/colmap2nerf.py --colmap_db database.db --images images/ --text colmap_text/# 单相机视频转换(需FFmpeg)
ffmpeg -i input.mp4 -vf fps=2 -q:v 2 images/%04d.jpg
2. 训练与重建
# 启动GUI训练
./build/testbed --scene data/nerf/fox# 命令行训练(无界面)
./build/instant-ngp data/nerf/fox/transforms.json --mode nerf# 关键参数调节
--aabb_scale 32 # 场景缩放系数
--snapshots 100,500,1000 # 自动保存间隔
3. 结果导出与应用
# 导出Mesh模型
./build/instant-meshing input.ply --output mesh.obj# 生成全景视频
./build/render --scene fox --trajectory spiral --fps 30 --output video.mp4# 实时交互查看
./build/testbed --scene fox --interactive
核心技术深度解析
哈希编码实现
template <typename T>
__global__ void kernel_grid(const uint32_t num_elements,const T* __restrict__ inputs,const uint32_t hashmap_size,const uint32_t offset,float* __restrict__ outputs
) {const uint32_t i = threadIdx.x + blockIdx.x * blockDim.x;if (i >= num_elements) return;// 计算多级哈希索引const T input = inputs[i];const uint32_t level = compute_level(input);const uint32_t hash = compute_hash(input, level);// 特征插值outputs[i] = trilinear_interpolation(hash, input);
}
混合精度训练
training:optimizer: Adamlearning_rate: 1e-2→1e-4 (指数衰减)loss_scale: 1024 # 动态损失缩放precision: fp16 # 半精度模式
渲染优化
void render_ray(const Ray& ray) {// 分层采样for (uint32_t i=0; i<steps; ++i) {float t = t_min + (t_max - t_min) * i / steps;// 哈希编码查询vec3 pos = ray.origin + t * ray.dir;Feature feature = hash_table.lookup(pos);// 体渲染积分sigma = mlp_sigma(feature);rgb = mlp_rgb(feature, ray.dir);accum_color += (1 - accum_alpha) * rgb * sigma;accum_alpha += (1 - accum_alpha) * sigma;// 自适应步长if (accum_alpha > 0.99f) break;}
}
常见问题与解决方案
1. 编译失败
现象:CMake Error: Could not find OpenGL
解决:
# Ubuntu
sudo apt install libgl1-mesa-dev libglu1-mesa-dev# Windows
安装vcpkg后执行:
vcpkg install glfw3 glew openexr
2. 训练崩溃
现象:CUDA error: out of memory
优化策略:
# 降低哈希表分辨率
--hashmap_size 19→17 # 每级特征维度从2^19降至2^17# 减小输入分辨率
python scripts/colmap2nerf.py --images images/ --downscale 2# 启用梯度裁剪
--gradient_clip 1e-2
3. 重建伪影
诊断与修复:
- 检查数据对齐:
python scripts/colmap2nerf.py --aabb_scale 32→64 - 调整损失权重:
--lambda_distortion 0.01→0.1 # 增强几何平滑约束 - 增加训练迭代:
--n_training_steps 10000→30000
学术背景与核心论文
基础论文
-
Instant Neural Graphics Primitives with a Multiresolution Hash Encoding
Müller T, et al. SIGGRAPH 2022
提出多分辨率哈希编码方法 -
NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
Mildenhall B, et al. ECCV 2020
NeRF奠基性工作 -
Adaptive Coordinate Networks for Neural Scene Representation
Martel J, et al. NeurIPS 2021
自适应坐标网络理论基础
扩展研究
-
Zip-NeRF: Anti-Aliased Grid-Based Neural Radiance Fields
Barron J, et al. ICCV 2023
抗锯齿改进方案 -
Dynamic Neural Radiance Fields
Park K, et al. SIGGRAPH 2021
动态场景扩展 -
Neural Sparse Voxel Fields
Liu L, et al. NeurIPS 2020
稀疏体素场技术
应用场景与未来展望
典型应用领域
- 虚拟制作:影视级实时场景重建
- 工业仿真:产品原型快速建模
- 数字孪生:城市级三维重建
- 医学影像:器官结构可视化
技术演进方向
- 动态场景支持:实时运动物体重建
- 跨尺度建模:从微观到宏观统一表达
- 语义理解集成:结合目标检测与分割
- 云端部署:支持大规模分布式训练
Instant-NGP通过其革命性的哈希编码技术,将神经辐射场推向了实时化应用的新纪元。随着硬件性能的持续提升和算法优化的深入,该框架有望成为元宇宙时代三维数字内容生产的核心基础设施。