PID控制中,一阶低通滤波算法
在PID控制中,一阶低通滤波常用来减少测量噪声或高频干扰,通常用以下公式实现: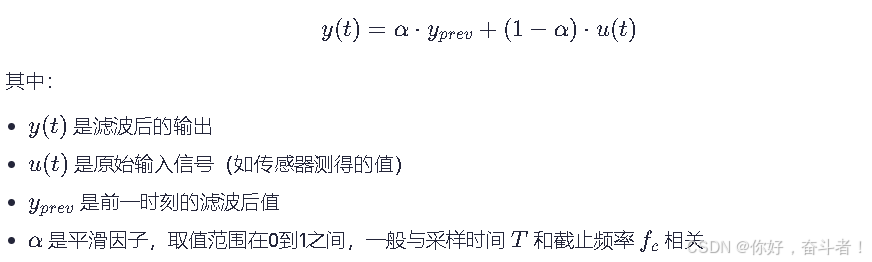
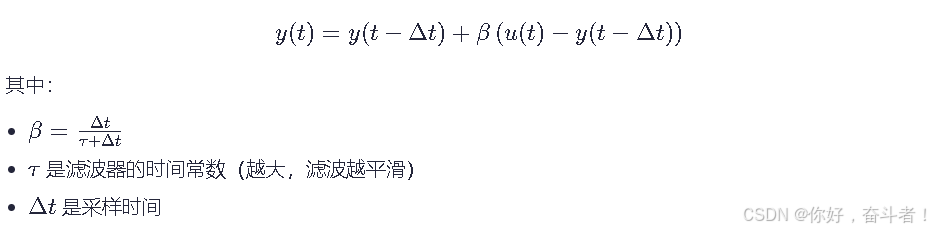
常用实现方式:
简单理解:
- 这实际上是一个一阶RC低通滤波器的离散实现
- 作用是平滑输入信号,去除高频波动
假设的滤波公式:![]()
对应代码的思路:
g_motor_data.motor_pwm相当于滤波后的值 y(t)y(t)- 你可以定义一个变量,比如
motor_pwm_raw,为原始输入(比如传感器或其他信号) - 你用类似下面的代码实现滤波:
总结:
- 这段代码实际上似乎是限制
motor_pwm范围的。 - 一阶低通滤波会在两个值之间平滑过渡,使信号变得更平滑,避免突变。
- 可以通过定义一个“上一时刻的值”变量,用公式逐次计算出滤波后的值。