【仿真】Ubuntu 22.04 安装MuJoCo 3.3.2
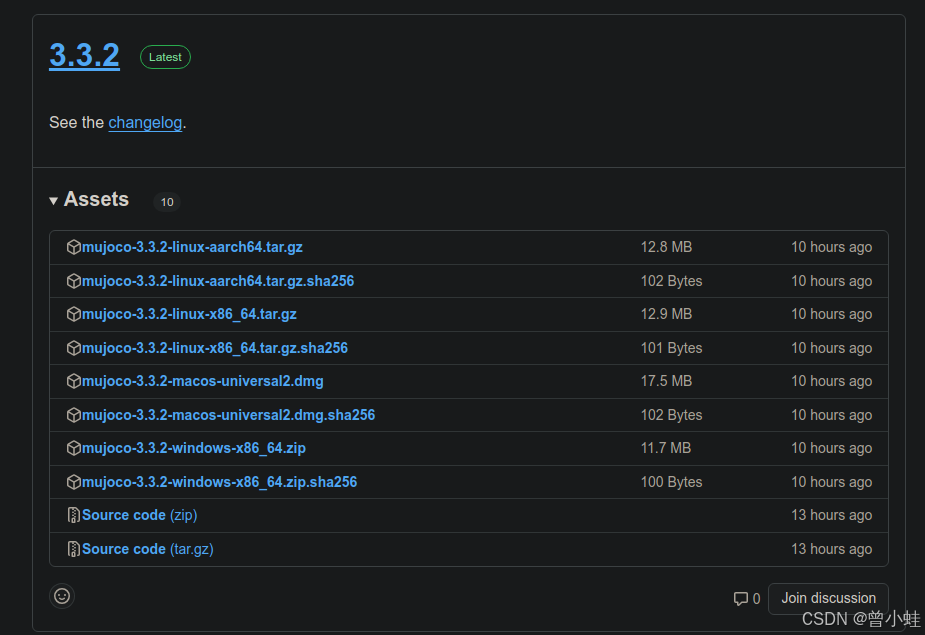
官方GIthub下载: https://github.com/google-deepmind/mujoco/releases
官网:MuJoCo — Advanced Physics Simulation 文档:Overview - MuJoCo Documentation
主要参考:Ubuntu 22.04 安装Mujoco 3.22 - RobotStudent的文章 - 知乎
简介
MuJoCo : Multi-Joint dynamics with Contact 表示:接触的多关节动力学。
是一种免费的开源物理引擎,旨在促进机器人技术 robotics,生物力学 biomechanics,图形和动画以及需要快速准确模拟的其他领域的研发
下载
根据操作系统,选择版本适配例如(mujoco-3.3.2-linux-x86_64.tar.gz)
解压 (界面/ 命令)
tar -zxvf mujoco-3.3.2-linux-x86_64.tar.gz -C ./mujoco将bin文件添加到系统PATH路径
# 将/home/zengxy/code/mujoco-3.3.2/路径改为自己实际路径
echo "export PATH=/home/zengxy/code/mujoco-3.3.2/bin:$PATH" >> ~/.bashrc # 立刻生效
source ~/.bashrc # 或简写为 . ~/.bashrc启动mujoco GUI
直接在Ui中启动
在终端启动
simulate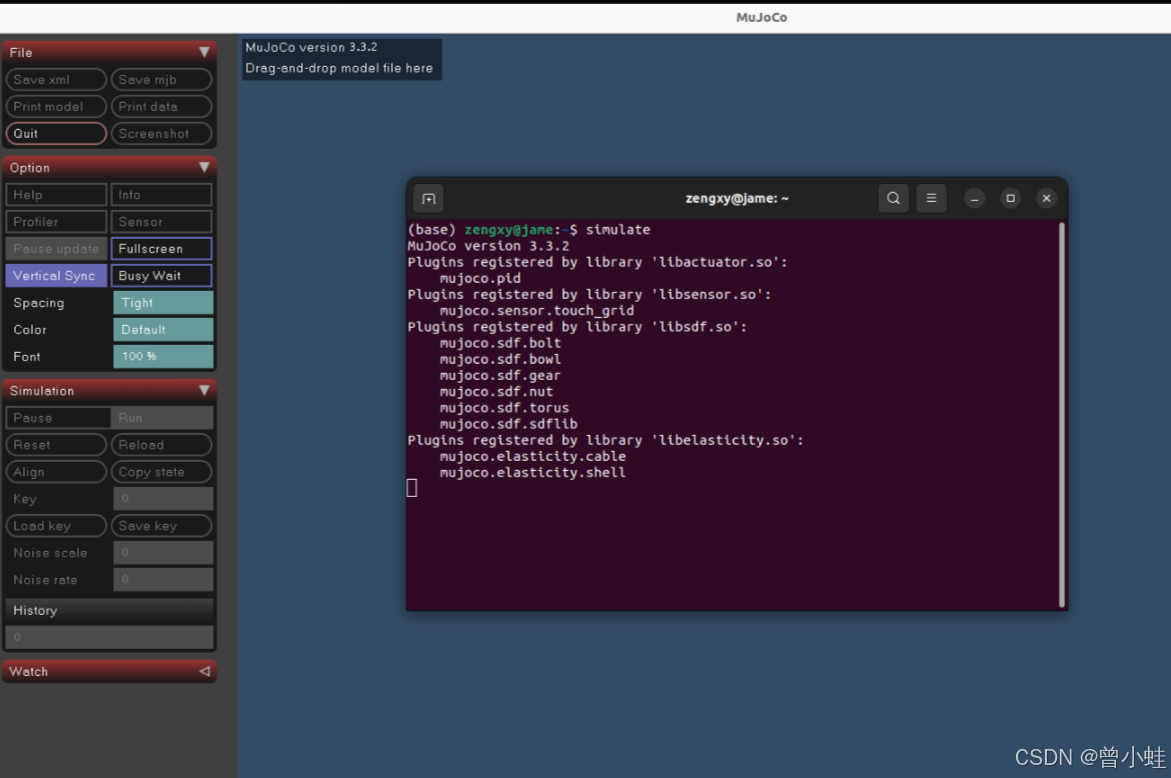
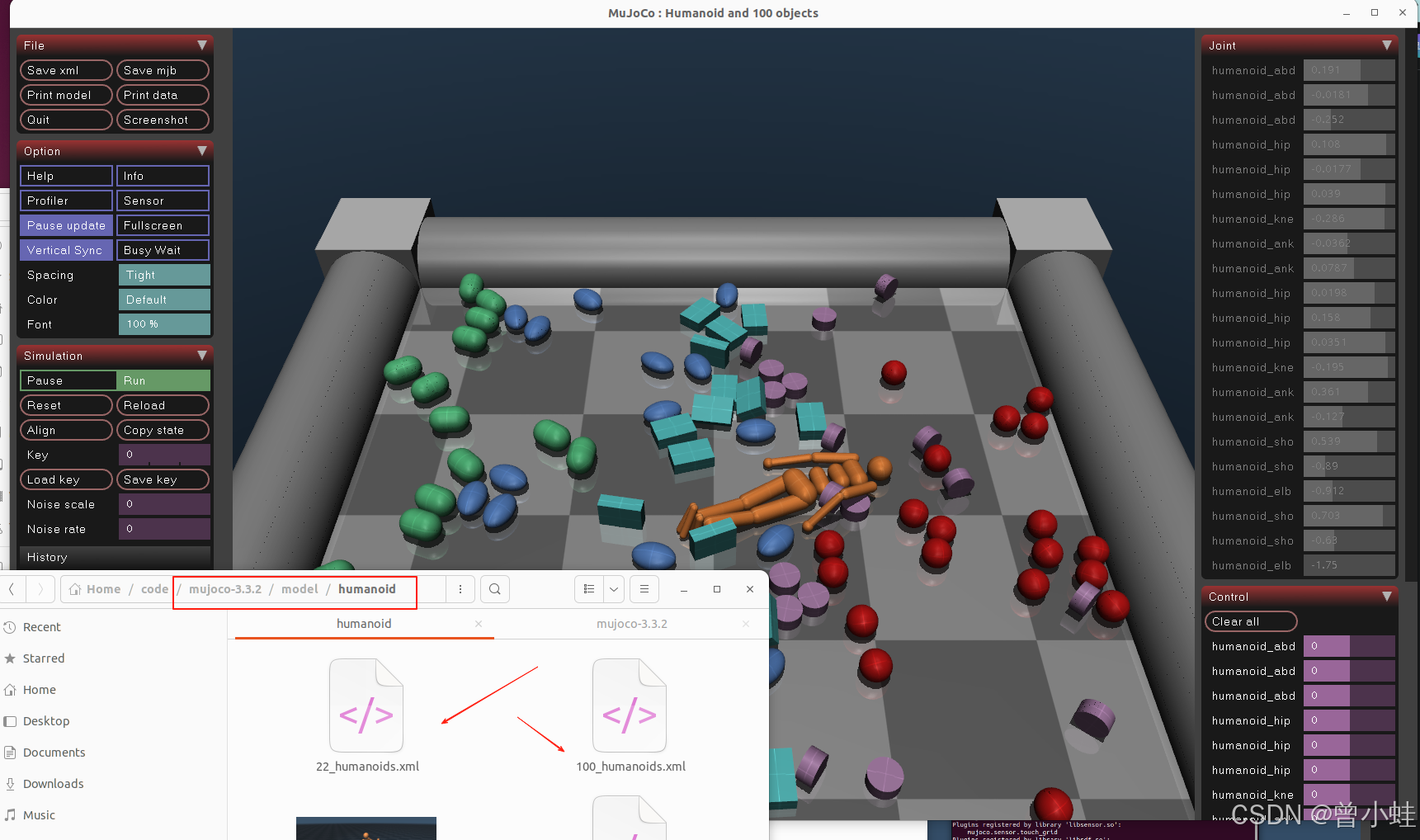
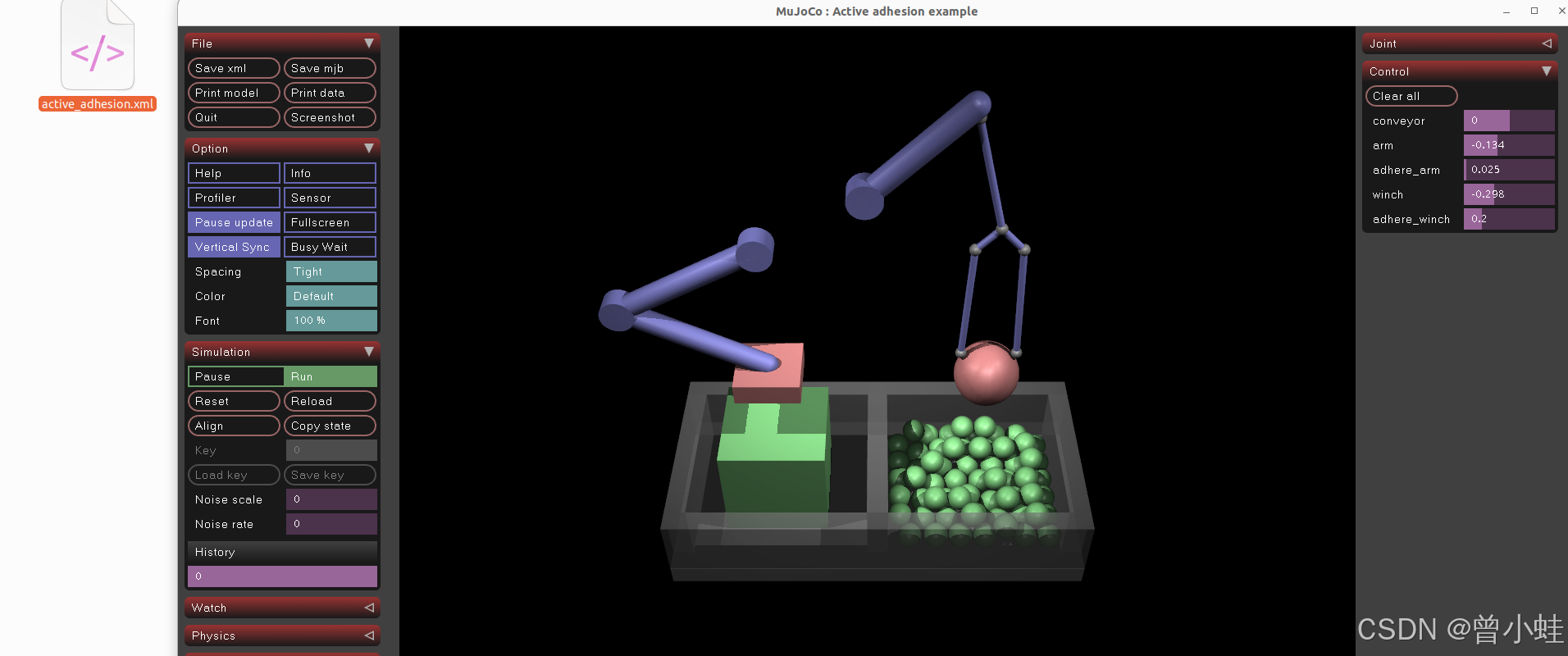
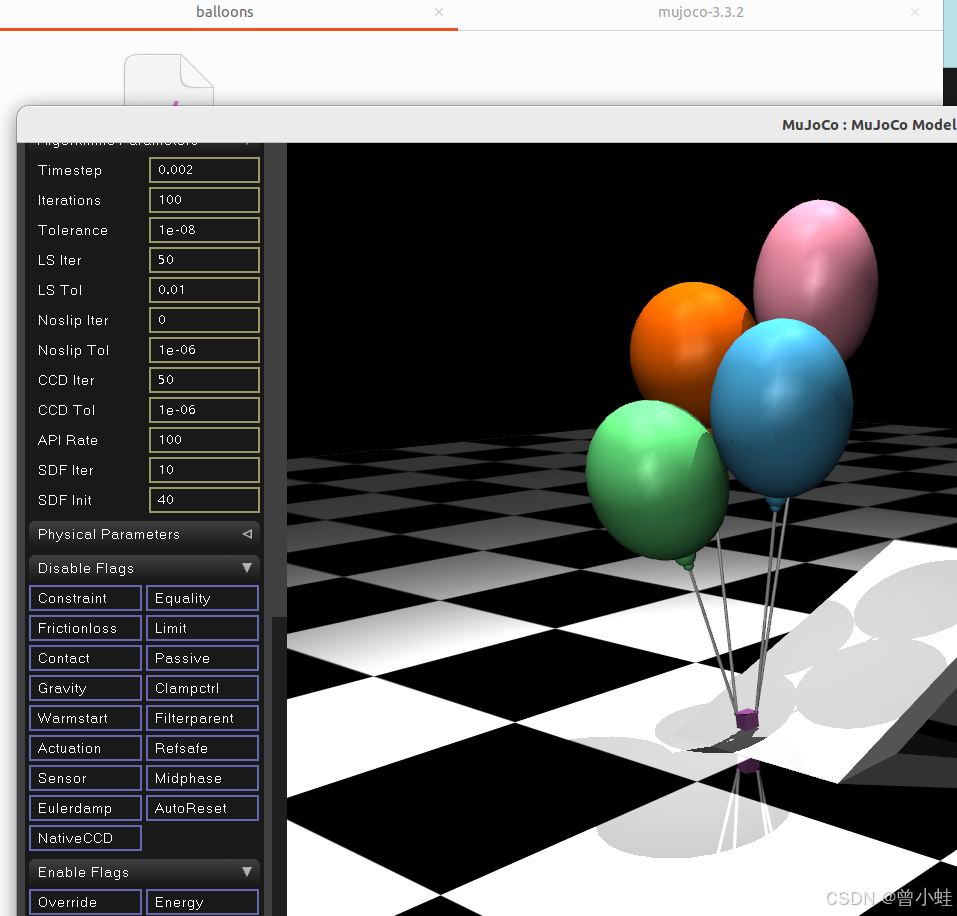
导入一个模型 :
直接拖入model文件夹里的 XML到mujoco界面
humanoid