科研新触角:松灵六轴臂重构具身智能生态
在具身智能(Embodied AI)从实验室走向产业化的进程中,硬件性能与场景适配性成为技术落地的核心瓶颈。松灵机器人推出的全自研科研级轻量六轴机械臂PiPER,以“轻量化设计+毫米级精度+跨平台兼容”三大技术突破,重新定义了具身智能硬件的研发范式。
其自研高效电机系统与智能算法的结合,使机械臂在复杂场景中实现“感知-决策-执行”的闭环,为科研机构与产业界提供了高性价比的具身智能开发平台。
松灵PiPER技术规格:
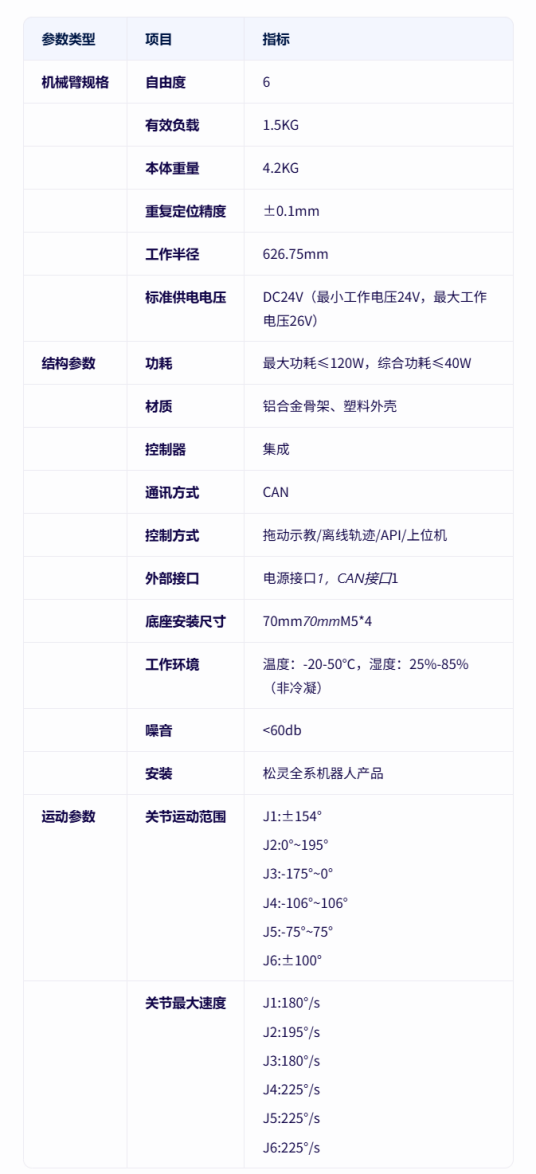
松灵 PiPER 机械臂在具身智能研究领域的三大显著性能优势
毫米级精准操与多轴灵活协作
±0.01mm微米级定位精度,芯片封装误差率<0.1%,6轴360°旋转关节响应
轻量化与高负载的极致平衡
4.2kg轻量化机身承载1.5kg负荷,626mm工作半径
跨平台兼容与开放开发生态
适配Python/ROS1/ROS2及Gazebo/IssacSim仿真平台,SDK工具包与API文档助力快速部署具身智能算法,开发周期缩短50%。
一站式软硬件配套方案:加速行业场景落地
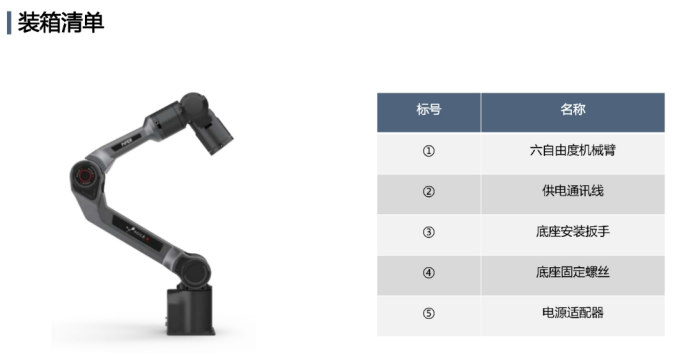
为降低具身智能技术的研发门槛,松灵机器人联合BFT平台推出“硬件+软件+服务”全链路解决方案:
- 硬件层面:提供即插即用的机械臂本体与集成式控制器,支持CAN总线通信,数据传输延迟低于10ms;
- 软件层面:预置视觉识别、力觉反馈等算法模块,兼容主流AI框架,支持通过ROS2实现多机械臂协同控制;
- 服务层面:BFT平台提供从技术咨询到售后支持的全方位服务,包括基于Gazebo的虚拟调试环境与现场部署指导。