当前位置: 首页 > news >正文 ORB-SLAM学习感悟记录 news 2025/10/23 10:56:33 orb特征点的旋转不变性 利用灰度质心法求出的质心后,与形心连线所形成的角度如下图所示: 这里容易对上图进行误解: 为了保证旋转不变性,这里注意ORB-slam是利用这个角度旋转坐标系,以新坐标系为标准从图像中采点进行brief描述子生成(图像是没有旋转的),所以需要将新坐标系下的点转到初始坐标系下的点进行图像采点!而不是取那块图像旋转对应角度(如果这样,则需要旋转相反角度) 查看全文 http://www.dtcms.com/a/103001.html 相关文章: Kotlin 基础语法解析 排序算法3-交换排序 红宝书第二十三讲:详解DOM事件模型:冒泡与事件委托 QCustomPlot拖动绘制变慢问题解决方案 LM2576手册解读:高效降压型 DC - DC 转换器的全面解析 LabVIEW故障诊断数据处理方法 Elasticsearch 基本概念与增删改查 【FreeRTOS】裸机开发与操作系统区别 整数二分·二分的思想与模板·经典二分题:数的范围 面基:雪花算法Snowflake时钟回拨问题解决方案 Redis 服务端主动回收配置 项目实战 - 用户列表 AIP-203 域行为文档 MyBatis执行批量插入sqlserver报错:不允许从数据类型 varbinary 到 datetime2 的隐式转换 PowerBi 桑基图(SanKey)显示多节点的解决方法 数据结构与算法基本概念 使用大语言模型进行Python图表可视化 【质量管理】质量的系统是预防,那以预防为主的质量管理系统包括什么? 【QT】练习1 里昂惕夫矩阵:投入产出分析 element-plus走马灯(el-carousel)不显示问题 【数论3】裴属定理与扩展欧几里得算法 naive_admin项目实战03 基于Go语言的后端 LearnOpenGL小练习(QOpenGLWidget版本) 【杂谈】-大型语言模型对具身人工智能发展的推动与挑战 Apache Hive和Snowflake的`CREATE VIEW`语法和功能特性整理的对比表 移动端六大语言速记:第5部分 - 面向对象编程(OOP) 翻译: 人工智能如何让世界变得更美好三 深入解析HTTP请求方法:Spring Boot实战与最佳实践 【LeetCode 热题100】208:实现 Trie (前缀树)(详细解析)(Go语言版)
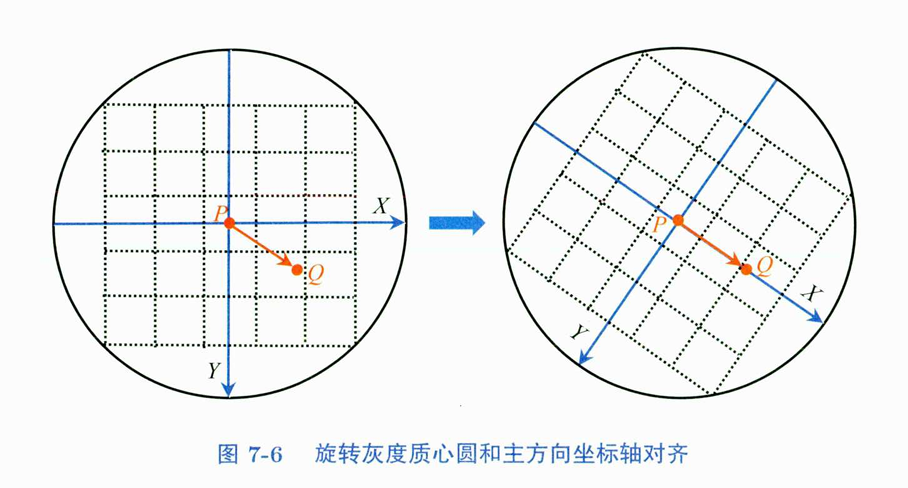
orb特征点的旋转不变性 利用灰度质心法求出的质心后,与形心连线所形成的角度如下图所示: 这里容易对上图进行误解: 为了保证旋转不变性,这里注意ORB-slam是利用这个角度旋转坐标系,以新坐标系为标准从图像中采点进行brief描述子生成(图像是没有旋转的),所以需要将新坐标系下的点转到初始坐标系下的点进行图像采点!而不是取那块图像旋转对应角度(如果这样,则需要旋转相反角度) 查看全文 http://www.dtcms.com/a/103001.html 相关文章: Kotlin 基础语法解析 排序算法3-交换排序 红宝书第二十三讲:详解DOM事件模型:冒泡与事件委托 QCustomPlot拖动绘制变慢问题解决方案 LM2576手册解读:高效降压型 DC - DC 转换器的全面解析 LabVIEW故障诊断数据处理方法 Elasticsearch 基本概念与增删改查 【FreeRTOS】裸机开发与操作系统区别 整数二分·二分的思想与模板·经典二分题:数的范围 面基:雪花算法Snowflake时钟回拨问题解决方案 Redis 服务端主动回收配置 项目实战 - 用户列表 AIP-203 域行为文档 MyBatis执行批量插入sqlserver报错:不允许从数据类型 varbinary 到 datetime2 的隐式转换 PowerBi 桑基图(SanKey)显示多节点的解决方法 数据结构与算法基本概念 使用大语言模型进行Python图表可视化 【质量管理】质量的系统是预防,那以预防为主的质量管理系统包括什么? 【QT】练习1 里昂惕夫矩阵:投入产出分析 element-plus走马灯(el-carousel)不显示问题 【数论3】裴属定理与扩展欧几里得算法 naive_admin项目实战03 基于Go语言的后端 LearnOpenGL小练习(QOpenGLWidget版本) 【杂谈】-大型语言模型对具身人工智能发展的推动与挑战 Apache Hive和Snowflake的`CREATE VIEW`语法和功能特性整理的对比表 移动端六大语言速记:第5部分 - 面向对象编程(OOP) 翻译: 人工智能如何让世界变得更美好三 深入解析HTTP请求方法:Spring Boot实战与最佳实践 【LeetCode 热题100】208:实现 Trie (前缀树)(详细解析)(Go语言版)