ESP32移植Openharmony外设篇(11) mfrc522射频读卡器
mfrc522 射频读写器
模块介绍
基于MFRC522 IC的RC522 RFID模块是最便宜的RFID选项之一,它通常带有一个具有1KB内存的RFID卡标签和密钥卡标签。最棒的是,它可以编写标签,因此您可以在其中存储某种秘密消息。
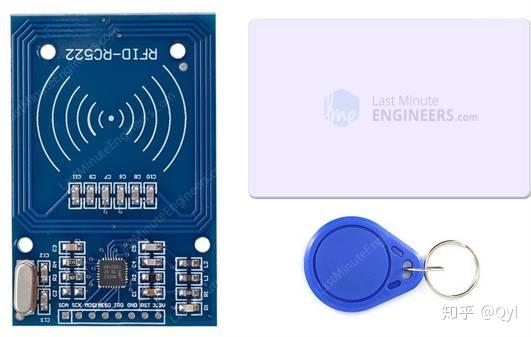
RC522 RFID阅读器模块旨在创建13.56MHz的电磁场,用于与RFID标签(ISO 14443A标准标签)进行通信。阅读器可以通过4引脚串行外围接口(SPI)与微控制器进行通信,最大数据速率为10Mbps。它还支持通过I2C和UART协议进行通信。
该模块带有一个中断引脚。这很方便,因为与其一直问RFID模块“还没有看到卡片?”,当标签进入附近时,模块会提醒我们。
该模块的工作电压为2.5至3.3V,逻辑引脚最高可支持到5伏的电压。
规格说明
| 频率范围 | 13.56 MHz ISM频段 |
| 主机介面 | SPI / I2C / UART |
| 工作电源电压 | 2.5 V至3.3 V |
| 最高 工作电流 | 13-26毫安 |
| 最小 电流(掉电) | 10微安 |
| 逻辑输入 | 5V |
| 读取范围 | 5厘米 |
外设接口介绍
SPI(Serial Peripheral Interface)串行外设接口
SPI 协议是由摩托罗拉公司提出的通讯协议,即串行外围设备接口,是一种高速全双工的通信总线。它被广泛地使用在 ADC、LCD 等设备与 MCU 间,要求通讯速率较高的场合。芯片的管脚上只占用四根线。
- MISO:主器件数据输出,从器件数据输入。
- MOSI:主器件数据输入,从器件数据输出。
- SCK: 时钟信号,由主设备控制发出。
- NSS(CS): 从设备选择信号,由主设备控制。当NSS为低电平则选中从器件。
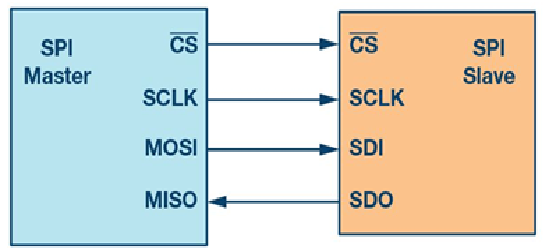
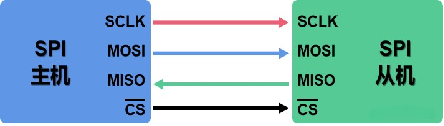
SPI通讯设备的通讯模式是主从通讯模式,通讯双方有主从之分,根据从机设备的数量,SPI通讯设备之间的连接方式可分为一主一从和一主多从。
“一主一从”连接方式
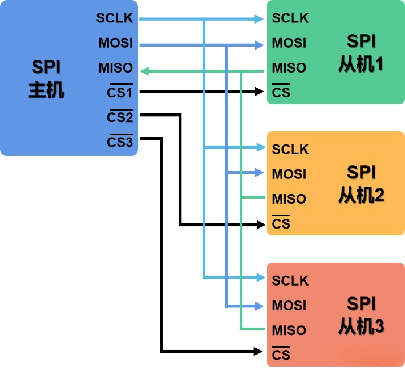
“一主多从”连接方式
SPI 总线上每个从设备都被主设备独立控制,每个从设备都有一个独立的 CS 信号,用于选择需要通信的从设备。其优势包括:
- 灵活性高:每个从设备可以独立控制,不受其他从设备的影响,可以根据需要选择通信对象。
- 易于调试:每个从设备之间相互隔离,可以方便地进行单独调试和故障排除。
- 速度快:由于没有菊花链中的额外延迟,可以实现更快的数据传输速度。
SPI 工作模式
SPI通信协议有四种不同的模式 ,由时钟极性CPOL来配置SCLK在空闲时,应该处于的状态(高/低);由时钟相位CPHA来配置在第几个边沿进行采样。
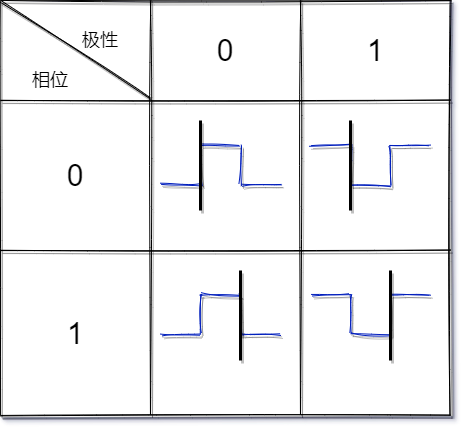
| SPI Mode | CPOL | CPHA |
| 0[00] | 0 | 0 |
| 1[01] | 0 | 1 |
| 2[10] | 1 | 0 |
| 3[11] | 1 | 1 |
因为我们通常在上升沿采集数据,模式0和模式3更常用。
SPI特性(ESP32)
SPI 主机驱动程序负责管理主机与设备间的通信,具有以下特性:
- 支持多线程环境使用
- 读写数据过程中 DMA 透明传输
- 同一信号总线上不同设备的数据可自动时分复用、、
代码示例
介绍完基本的理论知识,我们可以通过SPI通信+DMA数据传输的方式获取IC卡的UID数据,并通过串口助手打印
board_gpio.c
/*********************************************************************
* INCLUDES
*/
#include "driver/gpio.h"
#include "board_gpio.h"
/*********************************************************************
* PUBLIC FUNCTIONS
*/
/**
@brief NFC复位引脚初始化
@param 无
@return 无
*/
void NFC_GPIO_Init(void)
{
gpio_pad_select_gpio(NFC_RST_GPIO_PIN); // 选择一个GPIO
gpio_set_direction(NFC_RST_GPIO_PIN, GPIO_MODE_OUTPUT); // 把这个GPIO作为输出
NFC_GPIO_Write(NFC_RST_HIGH);
}
/**
@brief 配置NFC复位引脚工作模式
@param mode -[in] 工作模式
@return 无
*/
void NFC_GPIO_Write(uint8_t mode)
{
gpio_set_level(NFC_RST_GPIO_PIN, mode);
}
board_gpio.h
#ifndef _BOARD_GPIO_H_
#define _BOARD_GPIO_H_
/*********************************************************************
* INCLUDES
*/
#include "driver/gpio.h"
/*********************************************************************
* DEFINITIONS
*/
#define NFC_RST_GPIO_PIN GPIO_NUM_25 // NFC复位
#define NFC_RST_LOW 0x00
#define NFC_RST_HIGH 0x01
/*********************************************************************
* API FUNCTIONS
*/
void NFC_GPIO_Init(void);
void NFC_GPIO_Write(uint8_t mode);
#endif /* _BOARD_GPIO_H_ */board_mfrc522.c
/*********************************************************************
* INCLUDES
*/
#include <string.h>
#include "cmsis_os2.h"
#include "ohos_run.h"
#include "esp_system.h"
#include "nvs_flash.h"
#include "esp_log.h"
#include "board_gpio.h"
#include "board_spi.h"
#include "board_mfrc522.h"
static char pcdRequest(uint8_t reqCode, uint8_t *pTagType);
static char pcdAnticoll(uint8_t *pSnr);
static char pcdSelect(uint8_t *pSnr);
static char pcdAuthState(uint8_t authMode, uint8_t addr, uint8_t *pKey, uint8_t *pSnr);
static char pcdAuthState1(uint8_t authMode, uint8_t addr, uint8_t *pKey, uint8_t *pSnr);
static char pcdRead(uint8_t addr, uint8_t *pData);
static char pcdWrite(uint8_t addr, uint8_t *pData);
static void pcdReset(void);
static void calulateCRC(uint8_t *pInData, uint8_t len, uint8_t *pOutData);
static char pcdComMF522(uint8_t command, uint8_t *pInData, uint8_t inLenByte, uint8_t *pOutData, uint32_t *pOutLenBit);
static void pcdAntennaOn(void);
static void pcdAntennaOff(void);
static void setBitMask(uint8_t reg, uint8_t mask);
static void clearBitMask(uint8_t reg, uint8_t mask);
static uint8_t readRawRc(uint8_t addr);
static void writeRawRc(uint8_t addr, uint8_t writeData);
static void delayMs(uint8_t time);
/*********************************************************************
* LOCAL VARIABLES
*/
static uint8_t s_cardType[2]; // 卡类型
static uint8_t s_cardSerialNo[4]; // 卡序列号
static uint8_t s_defaultKeyA[6] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF}; // 默认密码A
static uint8_t s_defaultKeyB[6] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00}; // 默认密码A
static bool s_cardPresent = false; // 标记当前是否有卡在读卡区
static const char *TAG = "MFRC522";
/*********************************************************************
* PUBLIC FUNCTIONS
*/
/**
@brief MFRC522的初始化函数
@param 无
@return 无
*/
void MFRC522_Init(void)
{
pcdReset(); // 复位
delayMs(5);
ESP_LOGI(TAG, "reg: %02x", readRawRc(Status1Reg));
ESP_LOGI(TAG, "reg: %02x", readRawRc(Status2Reg));
ESP_LOGI(TAG, "reg: %02x", readRawRc(WaterLevelReg));
ESP_LOGI(TAG, "VersionReg: 0x%02X", readRawRc(VersionReg)); // 应返回0x92
ESP_LOGI(TAG, "ComIrqReg: 0x%02X", readRawRc(ComIrqReg));
pcdAntennaOn(); // 开启天线发射
}
/**
@brief MFRC522读取卡片块数据
@param addr -[in] 块地址
@return 状态值,0 - 成功;2 - 无卡;3 - 防冲撞失败;4 - 选卡失败;5 - 密码错误
*/
uint8_t MFRC522_ReadCardDataBlock(uint8_t addr)
{
memset(s_cardSerialNo, 0, 4);
if (pcdRequest(PICC_REQALL, s_cardType) == MI_OK)
{
}
else
{
// ESP_LOGI(TAG, "ERR: 2");
return 2; // 无卡
}
if (pcdAnticoll(s_cardSerialNo) == MI_OK)
{
}
else
{
ESP_LOGI(TAG, "ERR: 3");
return 3; // 防冲撞失败
}
if (pcdSelect(s_cardSerialNo) == MI_OK)
{
}
else
{
ESP_LOGI(TAG, "ERR: 4");
return 4; // 选卡失败
}
if (pcdAuthState(0x60, addr, s_defaultKeyA, s_cardSerialNo) == MI_OK)
{
// ESP_LOGI(TAG, "ERR: 0");
return 0;
}
else
{
ESP_LOGI(TAG, "ERR: 5");
return 5; // 密码错误
}
}
/**
@brief 读取卡片序列号
@param pCardSerialNo -[out] 卡片序列号
@return 0 - 读卡成功;2 - 无卡
*/
uint8_t MFRC522_ReadCardSerialNo(uint8_t *pCardSerialNo)
{
// uint8_t status = MFRC522_ReadCardDataBlock(4);
// memcpy(pCardSerialNo, s_cardSerialNo, 4);
// pcdAntennaOff(); // 关键!读取后关闭天线
// vTaskDelay(50 / portTICK_PERIOD_MS);
// return status;
pcdReset();
vTaskDelay(50 / portTICK_PERIOD_MS);
pcdAntennaOn();
uint8_t status = MFRC522_ReadCardDataBlock(4);
memcpy(pCardSerialNo, s_cardSerialNo, 4);
// 新增:立即关闭射频场避免持续激活
pcdAntennaOff();
vTaskDelay(50 / portTICK_PERIOD_MS);
return status;
}
/*********************************************************************
* LOCAL FUNCTIONS
*/
/**
@brief 寻卡
@param reqCode -[in] 寻卡方式,0x52 寻感应区内所有符合1443A标准的卡,0x26 寻未进入休眠状态的卡
@param pTagType -[out] 卡片类型代码
0x4400 = Mifare_UltraLight
0x0400 = Mifare_One(S50)
0x0200 = Mifare_One(S70)
0x0800 = Mifare_Pro(X)
0x4403 = Mifare_DESFire
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdRequest(uint8_t reqCode, uint8_t *pTagType)
{
char status;
uint32_t len;
uint8_t comMF522Buf[MAXRLEN];
clearBitMask(Status2Reg, 0x08);
writeRawRc(BitFramingReg, 0x07);
setBitMask(TxControlReg, 0x03);
comMF522Buf[0] = reqCode;
status = pcdComMF522(PCD_TRANSCEIVE, comMF522Buf, 1, comMF522Buf, &len); // 发送并接收数据
if ((status == MI_OK) && (len == 0x10))
{
// ESP_LOGI(TAG, "mi_ok");
*pTagType = comMF522Buf[0];
*(pTagType + 1) = comMF522Buf[1];
}
else
{
// ESP_LOGI(TAG, "mi_err");
status = MI_ERR;
}
return status;
}
/**
@brief 防冲撞
@param pSnr -[out] 卡片序列号,4字节
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdAnticoll(uint8_t *pSnr)
{
char status;
uint8_t i, snrCheck = 0;
uint32_t len;
uint8_t comMF522Buf[MAXRLEN];
clearBitMask(Status2Reg, 0x08); // 寄存器包含接收器和发送器和数据模式检测器的状态标志
writeRawRc(BitFramingReg, 0x00); // 不启动数据发送,接收的LSB位存放在位0,接收到的第二位放在位1,定义发送的最后一个字节位数为8
clearBitMask(CollReg, 0x80); // 所有接收的位在冲突后将被清除
comMF522Buf[0] = PICC_ANTICOLL1;
comMF522Buf[1] = 0x20;
status = pcdComMF522(PCD_TRANSCEIVE, comMF522Buf, 2, comMF522Buf, &len);
if (status == MI_OK)
{
for (i = 0; i < 4; i++)
{
*(pSnr + i) = comMF522Buf[i];
snrCheck ^= comMF522Buf[i];
}
if (snrCheck != comMF522Buf[i]) // 返回四个字节,最后一个字节为校验位
{
status = MI_ERR;
}
}
setBitMask(CollReg, 0x80);
return status;
}
/**
@brief 选定卡片
@param pSnr -[in] 卡片序列号,4字节
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdSelect(uint8_t *pSnr)
{
char status;
uint8_t i;
uint8_t comMF522Buf[MAXRLEN];
uint32_t len;
comMF522Buf[0] = PICC_ANTICOLL1;
comMF522Buf[1] = 0x70;
comMF522Buf[6] = 0;
for (i = 0; i < 4; i++)
{
comMF522Buf[i + 2] = *(pSnr + i);
comMF522Buf[6] ^= *(pSnr + i);
}
calulateCRC(comMF522Buf, 7, &comMF522Buf[7]);
clearBitMask(Status2Reg, 0x08);
status = pcdComMF522(PCD_TRANSCEIVE, comMF522Buf, 9, comMF522Buf, &len);
if ((status == MI_OK) && (len == 0x18))
{
status = MI_OK;
}
else
{
status = MI_ERR;
}
return status;
}
/**
@brief 验证卡片密码
@param authMode -[in] 密码验证模式,0x60 验证A密钥,0x61 验证B密钥
@param addr -[in] 块地址
@param pKey -[in] 密码
@param pSnr -[in] 卡片序列号,4字节
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdAuthState(uint8_t authMode, uint8_t addr, uint8_t *pKey, uint8_t *pSnr)
{
char status;
uint8_t i, comMF522Buf[MAXRLEN];
uint32_t len;
comMF522Buf[0] = authMode;
comMF522Buf[1] = addr;
// 拷贝6字节密钥
for (i = 0; i < 6; i++)
{
comMF522Buf[i + 2] = pKey[i];
}
// 修改:仅拷贝4字节UID
for (i = 0; i < 4; i++)
{
comMF522Buf[i + 8] = pSnr[i];
}
// 发送12字节数据:1+1+6+4=12
status = pcdComMF522(PCD_AUTHENT, comMF522Buf, 12, comMF522Buf, &len);
if ((status != MI_OK) || (!(readRawRc(Status2Reg) & 0x08)))
{
status = MI_ERR;
}
return status;
}
/**
@brief 验证贴片RFID密码
@param authMode -[in] 密码验证模式,0x60 验证A密钥,0x61 验证B密钥
@param addr -[in] 块地址
@param pKey -[in] 密码
@param pSnr -[in] 卡片序列号,4字节
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdAuthState1(uint8_t authMode, uint8_t addr, uint8_t *pKey, uint8_t *pSnr)
{
char status;
uint8_t i, comMF522Buf[MAXRLEN];
uint32_t len;
comMF522Buf[0] = authMode;
comMF522Buf[1] = addr;
for (i = 0; i < 6; i++)
{
comMF522Buf[i + 2] = *(pKey + i);
}
for (i = 0; i < 6; i++)
{
comMF522Buf[i + 8] = *(pSnr + i);
}
status = pcdComMF522(PCD_AUTHENT, comMF522Buf, 12, comMF522Buf, &len);
if ((status != MI_OK) || (!(readRawRc(Status2Reg) & 0x08)))
{
status = MI_ERR;
}
return status;
}
/**
@brief 读取M1卡一块数据
@param addr -[in] 块地址
@param pData -[out] 读出的数据,16字节
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdRead(uint8_t addr, uint8_t *pData)
{
char status;
uint8_t i, comMF522Buf[MAXRLEN];
uint32_t len;
comMF522Buf[0] = PICC_READ;
comMF522Buf[1] = addr;
calulateCRC(comMF522Buf, 2, &comMF522Buf[2]);
status = pcdComMF522(PCD_TRANSCEIVE, comMF522Buf, 4, comMF522Buf, &len);
if ((status == MI_OK) && (len == 0x90))
{
for (i = 0; i < 16; i++)
{
*(pData + i) = comMF522Buf[i];
}
}
else
{
status = MI_ERR;
}
return status;
}
/**
@brief 写入M1卡一块数据
@param addr -[in] 块地址
@param pData -[out] 写入的数据,16字节
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdWrite(uint8_t addr, uint8_t *pData)
{
char status;
uint8_t i, comMF522Buf[MAXRLEN];
uint32_t len;
comMF522Buf[0] = PICC_WRITE;
comMF522Buf[1] = addr;
calulateCRC(comMF522Buf, 2, &comMF522Buf[2]);
status = pcdComMF522(PCD_TRANSCEIVE, comMF522Buf, 4, comMF522Buf, &len);
if ((status != MI_OK) || (len != 4) || ((comMF522Buf[0] & 0x0F) != 0x0A))
{
status = MI_ERR;
}
if (status == MI_OK)
{
for (i = 0; i < 16; i++)
{
comMF522Buf[i] = *(pData + i);
}
calulateCRC(comMF522Buf, 16, &comMF522Buf[16]);
status = pcdComMF522(PCD_TRANSCEIVE, comMF522Buf, 18, comMF522Buf, &len);
if ((status != MI_OK) || (len != 4) || ((comMF522Buf[0] & 0x0F) != 0x0A))
{
status = MI_ERR;
}
}
return status;
}
/**
@brief 复位RC522
@return 无
*/
static void pcdReset(void)
{
// 硬件复位
NFC_GPIO_Write(NFC_RST_LOW);
delayMs(50); // 延长复位时间确保稳定
NFC_GPIO_Write(NFC_RST_HIGH);
delayMs(50);
// 寄存器配置根据手册调整
writeRawRc(CommandReg, PCD_RESETPHASE);
delayMs(1);
// 推荐初始化配置
writeRawRc(ModeReg, 0x3D); // 接收器增益设置
writeRawRc(TReloadRegL, 0x30); // 定时器重载值调整
writeRawRc(TReloadRegH, 0x00);
writeRawRc(TModeReg, 0x8D); // 定时器模式
writeRawRc(TPrescalerReg, 0x3E); // 分频系数
writeRawRc(TxASKReg, 0x40); // 允许自动检测调制
writeRawRc(RxThresholdReg, 0x84); // 设置RX阈值
}
/**
@brief 用MF522计算CRC16
@param pInData -[in] 计算CRC16的数组
@param len -[in] 计算CRC16的数组字节长度
@param pOutData -[out] 存放计算结果存放的首地址
@return 无
*/
static void calulateCRC(uint8_t *pInData, uint8_t len, uint8_t *pOutData)
{
uint8_t i, n;
clearBitMask(DivIrqReg, 0x04);
writeRawRc(CommandReg, PCD_IDLE);
setBitMask(FIFOLevelReg, 0x80);
for (i = 0; i < len; i++)
{
writeRawRc(FIFODataReg, *(pInData + i));
}
writeRawRc(CommandReg, PCD_CALCCRC);
i = 0xFF;
do
{
n = readRawRc(DivIrqReg);
i--;
} while ((i != 0) && !(n & 0x04));
pOutData[0] = readRawRc(CRCResultRegL);
pOutData[1] = readRawRc(CRCResultRegM);
}
/**
@brief 通过MFRC522和ISO14443卡通讯
@param command -[in] RC522命令字
@param pInData -[in] 通过RC522发送到卡片的数据
@param inLenByte -[in] 发送数据的字节长度
@param pOutData -[out] 接收到的卡片返回数据
@param pOutLenBit -[out] 返回数据的位长度
@return 状态值,MI OK - 成功;MI_ERR - 失败
*/
static char pcdComMF522(uint8_t command, uint8_t *pInData, uint8_t inLenByte, uint8_t *pOutData, uint32_t *pOutLenBit)
{
char status = MI_ERR;
uint8_t irqEn = 0x00;
uint8_t waitFor = 0x00;
uint8_t lastBits;
uint8_t n;
uint32_t i;
uint8_t j;
switch (command)
{
case PCD_AUTHENT:
irqEn = 0x12;
waitFor = 0x10;
break;
case PCD_TRANSCEIVE:
irqEn = 0x77;
waitFor = 0x30;
break;
default:
break;
}
writeRawRc(ComIEnReg, irqEn | 0x80);
clearBitMask(ComIrqReg, 0x80);
writeRawRc(CommandReg, PCD_IDLE);
setBitMask(FIFOLevelReg, 0x80); // 清空FIFO
for (i = 0; i < inLenByte; i++)
{
writeRawRc(FIFODataReg, pInData[i]); // 数据写入FIFO
}
writeRawRc(CommandReg, command); // 命令写入命令寄存器
if (command == PCD_TRANSCEIVE)
{
setBitMask(BitFramingReg, 0x80); // 开始发送
}
i = 6000; // 根据时钟频率调整,操作M1卡最大等待时间25ms 2000?
do
{
n = readRawRc(ComIrqReg);
i--;
} while ((i != 0) && !(n & 0x01) && !(n & waitFor));
clearBitMask(BitFramingReg, 0x80);
if (i != 0)
{
j = readRawRc(ErrorReg);
if (!(j & 0x1B))
{
status = MI_OK;
if (n & irqEn & 0x01)
{
status = MI_NOTAGERR;
}
if (command == PCD_TRANSCEIVE)
{
n = readRawRc(FIFOLevelReg);
lastBits = readRawRc(ControlReg) & 0x07;
if (lastBits)
{
*pOutLenBit = (n - 1) * 8 + lastBits;
}
else
{
*pOutLenBit = n * 8;
}
if (n == 0)
{
n = 1;
}
if (n > MAXRLEN)
{
n = MAXRLEN;
}
for (i = 0; i < n; i++)
{
pOutData[i] = readRawRc(FIFODataReg);
}
}
}
else
{
status = MI_ERR;
}
}
setBitMask(ControlReg, 0x80); // stop timer now
writeRawRc(CommandReg, PCD_IDLE);
return status;
}
/**
@brief 开启天线【每次启动或关闭天线发射之间至少有1ms的间隔】
@return 无
*/
static void pcdAntennaOn(void)
{
uint8_t temp;
temp = readRawRc(TxControlReg);
if (!(temp & 0x03))
{
setBitMask(TxControlReg, 0x03);
}
}
/**
@brief 关闭天线
@return 无
*/
static void pcdAntennaOff(void)
{
clearBitMask(TxControlReg, 0x03);
}
/**
@brief 置RC522寄存器位
@param reg -[in] 寄存器地址
@param mask -[in] 置位值
@return 无
*/
static void setBitMask(uint8_t reg, uint8_t mask)
{
char temp = 0x00;
temp = readRawRc(reg) | mask;
writeRawRc(reg, temp | mask); // set bit mask
}
/**
@brief 清RC522寄存器位
@param reg -[in] 寄存器地址
@param mask -[in] 清位值
@return 无
*/
static void clearBitMask(uint8_t reg, uint8_t mask)
{
char temp = 0x00;
temp = readRawRc(reg) & (~mask);
writeRawRc(reg, temp); // clear bit mask
}
/**
@brief 写RC522寄存器
@param addr -[in] 寄存器地址
@param writeData -[in] 写入数据
@return 无
*/
static void writeRawRc(uint8_t addr, uint8_t writeData)
{
SPI_CS_LOW;
// 合并地址和数据为一个传输帧
uint8_t txBuffer[2] = {
(addr << 1) & 0x7E, // 地址字节
writeData // 数据字节
};
// 单次SPI传输保证时序连续性
NFC_SPI_Write(txBuffer, sizeof(txBuffer));
SPI_CS_HIGH;
}
/**
@brief 读RC522寄存器
@param addr -[in] 寄存器地址
@return 读出一字节数据
*/
static uint8_t readRawRc(uint8_t addr)
{
uint8_t rxData = 0;
SPI_CS_LOW;
addr = (addr << 1) | 0x80; // 设置读标志位
// 先发送地址,再读取数据
NFC_SPI_Write(&addr, 1);
NFC_SPI_Read(&rxData, 1);
SPI_CS_HIGH;
return rxData;
}
/**
@brief 毫秒级延时函数
@param time -[in] 延时时间(毫秒)
@return 无
*/
static void delayMs(uint8_t time)
{
vTaskDelay(time / portTICK_PERIOD_MS);
}
static void monitor_task(void *arg)
{
ESP_ERROR_CHECK(nvs_flash_init());
NFC_GPIO_Init();
NFC_SPI_Init();
MFRC522_Init();
// while (1) // 任务都是一个无限循环,不能返回
// {
// pcdReset(); // 关键!每次循环前复位RC522
// vTaskDelay(50 / portTICK_PERIOD_MS);
// uint8_t card[4];
// uint8_t status = MFRC522_ReadCardSerialNo(card);
// if (status == 0)
// {
// printf("card: %02x%02x%02x%02x\n", card[0], card[1], card[2], card[3]);
// }
// else
// {
// printf("Read failed: %d\n", status);
// }
// vTaskDelay(1000 / portTICK_PERIOD_MS);
// }
while (1)
{
uint8_t card[4] = {0};
uint8_t status;
// 阶段1:检测新卡片放入
if (!s_cardPresent)
{
status = MFRC522_ReadCardSerialNo(card); // 尝试读取
if (status == 0)
{
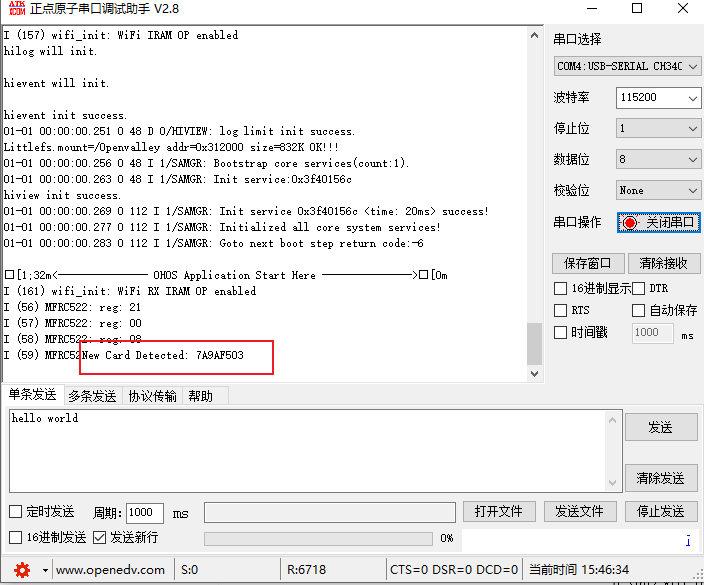
printf("New Card Detected: %02X%02X%02X%02X\n",
card[0], card[1], card[2], card[3]);
s_cardPresent = true; // 标记为已检测
}
}
// 阶段2:检测卡片是否移走
else
{
pcdAntennaOff(); // 关闭天线强制卡片离开
vTaskDelay(50 / portTICK_PERIOD_MS);
pcdAntennaOn();
// 检查卡片是否仍然存在
if (pcdRequest(PICC_REQALL, s_cardType) != MI_OK)
{
printf("Card Removed.\n");
s_cardPresent = false; // 重置状态
}
vTaskDelay(300 / portTICK_PERIOD_MS); // 降低检测频率
}
vTaskDelay(100 / portTICK_PERIOD_MS); // 主循环基础间隔
}
}
void mfrc522Test(void)
{
osThreadAttr_t attr;
attr.name = "mfrc522";
attr.attr_bits = 0U;
attr.cb_mem = NULL;
attr.cb_size = 0U;
attr.stack_mem = NULL;
attr.stack_size = 4096;
attr.priority = osPriorityNormal;
if (osThreadNew(monitor_task, NULL, &attr) == NULL)
{
printf("[mfrc522Test] Failed to create monitor_task!\n");
}
}
OHOS_APP_RUN(mfrc522Test);board_mfrc522.h
#ifndef _BOARD_MFRC522_H_
#define _BOARD_MFRC522_H_
/*********************************************************************
* INCLUDES
*/
/*********************************************************************
* DEFINITIONS
*/
#define MAXRLEN 18
//******************************************************************/
// MFRC522命令字
//******************************************************************/
#define PCD_IDLE 0x00 // 取消当前命令
#define PCD_AUTHENT 0x0E // 验证密钥
#define PCD_RECEIVE 0x08 // 接收数据
#define PCD_TRANSMIT 0x04 // 发送数据
#define PCD_TRANSCEIVE 0x0C // 发送并接收数据
#define PCD_RESETPHASE 0x0F // 复位
#define PCD_CALCCRC 0x03 // CRC计算
//******************************************************************/
// Mifare_One卡片命令字
//******************************************************************/
#define PICC_REQIDL 0x26 // 寻天线区内未进入休眠状态
#define PICC_REQALL 0x52 // 寻天线区内全部卡
#define PICC_ANTICOLL1 0x93 // 防冲撞
#define PICC_ANTICOLL2 0x95 // 防冲撞
#define PICC_AUTHENT1A 0x60 // 验证A密钥
#define PICC_AUTHENT1B 0x61 // 验证B密钥
#define PICC_READ 0x30 // 读块
#define PICC_WRITE 0xA0 // 写块
#define PICC_DECREMENT 0xC0 // 扣款
#define PICC_INCREMENT 0xC1 // 充值
#define PICC_RESTORE 0xC2 // 调块数据到缓冲区
#define PICC_TRANSFER 0xB0 // 保存缓冲区中数据
#define PICC_HALT 0x50 // 休眠
//******************************************************************/
// MFRC522 FIFO长度定义
//******************************************************************/
#define DEF_FIFO_LENGTH 64 // FIFO size=64byte
//******************************************************************/
// MFRC522寄存器定义
//******************************************************************/
// PAGE 0
#define RFU00 0x00
#define CommandReg 0x01
#define ComIEnReg 0x02
#define DivlEnReg 0x03
#define ComIrqReg 0x04
#define DivIrqReg 0x05
#define ErrorReg 0x06
#define Status1Reg 0x07
#define Status2Reg 0x08
#define FIFODataReg 0x09
#define FIFOLevelReg 0x0A
#define WaterLevelReg 0x0B
#define ControlReg 0x0C
#define BitFramingReg 0x0D
#define CollReg 0x0E
#define RFU0F 0x0F
// PAGE 1
#define RFU10 0x10
#define ModeReg 0x11
#define TxModeReg 0x12
#define RxModeReg 0x13
#define TxControlReg 0x14
#define TxASKReg 0x15
#define TxSelReg 0x16
#define RxSelReg 0x17
#define RxThresholdReg 0x18
#define DemodReg 0x19
#define RFU1A 0x1A
#define RFU1B 0x1B
#define MifareReg 0x1C
#define RFU1D 0x1D
#define RFU1E 0x1E
#define SerialSpeedReg 0x1F
// PAGE 2
#define RFU20 0x20
#define CRCResultRegM 0x21
#define CRCResultRegL 0x22
#define RFU23 0x23
#define ModWidthReg 0x24
#define RFU25 0x25
#define RFCfgReg 0x26
#define GsNReg 0x27
#define CWGsCfgReg 0x28
#define ModGsCfgReg 0x29
#define TModeReg 0x2A
#define TPrescalerReg 0x2B
#define TReloadRegH 0x2C
#define TReloadRegL 0x2D
#define TCounterValueRegH 0x2E
#define TCounterValueRegL 0x2F
// PAGE 3
#define RFU30 0x30
#define TestSel1Reg 0x31
#define TestSel2Reg 0x32
#define TestPinEnReg 0x33
#define TestPinValueReg 0x34
#define TestBusReg 0x35
#define AutoTestReg 0x36
#define VersionReg 0x37
#define AnalogTestReg 0x38
#define TestDAC1Reg 0x39
#define TestDAC2Reg 0x3A
#define TestADCReg 0x3B
#define RFU3C 0x3C
#define RFU3D 0x3D
#define RFU3E 0x3E
#define RFU3F 0x3F
//******************************************************************/
// MFRC522通讯返回错误代码
//******************************************************************/
#define MI_OK (char)0
#define MI_NOTAGERR (char)(-1)
#define MI_ERR (char)(-2)
//******************************************************************/
// 其他卡支持
#define PICC_TYPE_NTAG213 0x4401
#define PICC_TYPE_NTAG215 0x4403
/*********************************************************************
* API FUNCTIONS
*/
void MFRC522_Init(void);
uint8_t MFRC522_ReadCardDataBlock(uint8_t addr);
uint8_t MFRC522_ReadCardSerialNo(uint8_t *pCardSerialNo);
#endif /* _BOARD_MFRC522_H_ */board_spi.c
/*********************************************************************
* INCLUDES
*/
#include <string.h>
#include "driver/spi_master.h"
#include "board_spi.h"
/*********************************************************************
* LOCAL VARIABLES
*/
static spi_device_handle_t s_spiHandle;
/*********************************************************************
* PUBLIC FUNCTIONS
*/
/**
@brief NFC SPI驱动初始化
@param 无
@return 无
*/
void NFC_SPI_Init(void)
{
esp_err_t ret;
spi_bus_config_t spiBusConfig =
{
.miso_io_num = NFC_SPI_MISO_PIN, // MISO信号线
.mosi_io_num = NFC_SPI_MOSI_PIN, // MOSI信号线
.sclk_io_num = NFC_SPI_SCLK_PIN, // SCLK信号线
.quadwp_io_num = -1, // WP信号线,专用于QSPI的D2
.quadhd_io_num = -1, // HD信号线,专用于QSPI的D3
.max_transfer_sz = 64 * 8, // 最大传输数据大小
};
spi_device_interface_config_t spiDeviceConfig =
{
.clock_speed_hz = SPI_MASTER_FREQ_10M, // Clock out at 10 MHz,
.mode = 0, // SPI mode 0
/*
* The timing requirements to read the busy signal from the EEPROM cannot be easily emulated
* by SPI transactions. We need to control CS pin by SW to check the busy signal manually.
*/
.spics_io_num = -1,
.queue_size = 7, // 传输队列大小,决定了等待传输数据的数量
};
// Initialize the SPI bus
ret = spi_bus_initialize(SPI3_HOST, &spiBusConfig, DMA_CHAN);
ESP_ERROR_CHECK(ret);
ret = spi_bus_add_device(SPI3_HOST, &spiDeviceConfig, &s_spiHandle);
ESP_ERROR_CHECK(ret);
// 配置CS引脚
gpio_pad_select_gpio(NFC_SPI_CS_PIN); // 选择一个GPIO
gpio_set_direction(NFC_SPI_CS_PIN, GPIO_MODE_OUTPUT); // 把这个GPIO作为输出
}
/**
@brief NFC SPI写入数据
@param pData -[in] 写入数据
@param dataLen -[in] 写入数据长度
@return 无
*/
void NFC_SPI_Write(uint8_t *pData, uint32_t dataLen)
{
esp_err_t ret;
spi_transaction_t t;
if (0 == dataLen) // no need to send anything
{
return;
}
memset(&t, 0, sizeof(t)); // Zero out the transaction
t.length = dataLen * 8; // Len is in bytes, transaction length is in bits.
t.tx_buffer = pData; // Data
ret = spi_device_polling_transmit(s_spiHandle, &t); // Transmit!
assert(ret == ESP_OK); // Should have had no issues.
}
/**
@brief NFC SPI读取数据
@param pData -[out] 读取数据
@param dataLen -[in] 读取数据长度
@return 无
*/
void NFC_SPI_Read(uint8_t *pData, uint32_t dataLen)
{
spi_transaction_t t;
if (0 == dataLen) // no need to receivce anything
{
return;
}
memset(&t, 0, sizeof(t)); // Zero out the transaction
t.length = dataLen * 8; // Len is in bytes, transaction length is in bits.
t.rx_buffer = pData;
esp_err_t ret = spi_device_polling_transmit(s_spiHandle, &t);
assert(ret == ESP_OK);
}board_spi.h
#ifndef _BOARD_SPI_H_
#define _BOARD_SPI_H_
/*********************************************************************
* INCLUDES
*/
#include "driver/gpio.h"
/*********************************************************************
* DEFINITIONS
*/
#define NFC_SPI_MISO_PIN GPIO_NUM_19
#define NFC_SPI_MOSI_PIN GPIO_NUM_23
#define NFC_SPI_SCLK_PIN GPIO_NUM_18
#define NFC_SPI_CS_PIN GPIO_NUM_5
#define DMA_CHAN 2
#define SPI_CS_LOW gpio_set_level(NFC_SPI_CS_PIN, 0)
#define SPI_CS_HIGH gpio_set_level(NFC_SPI_CS_PIN, 1)
/*********************************************************************
* API FUNCTIONS
*/
void NFC_SPI_Init(void);
void NFC_SPI_Write(uint8_t *pData, uint32_t dataLen);
void NFC_SPI_Read(uint8_t *pData, uint32_t dataLen);
#endif /* _BOARD_SPI_H_ */BUILD.gn
# Copyright (c) 2022 Hunan OpenValley Digital Industry Development Co., Ltd.
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import("//kernel/liteos_m/liteos.gni")
module_name = get_path_info(rebase_path("."), "name")
kernel_module(module_name){
include_dirs = [
"//drivers/hdf_core/framework/include/platform/",
"//drivers/hdf_core/framework/include/utils/",
"//drivers/hdf_core/framework/support/platform/include/gpio",
"//drivers/hdf_core/adapter/khdf/liteos_m/osal/include/",
"//drivers/hdf_core/framework/include/core/",
"//drivers/hdf_core/framework/include/osal/",
"//device/soc/esp/esp32/components/driver/include",
"//device/soc/esp/esp32/components/esp_adc_cal/include",
"//device/soc/esp/esp32/components/driver/esp32/include",
"//device/soc/esp/esp32/components/esp_wifi/include",
"//foundation/communication/wifi_lite/interfaces/wifiservice",
"//device/soc/esp/esp32/liteos_m/hals/driver/wifi_lite",
"//device/soc/esp/esp32/components/esp_event/include",
"//device/soc/esp/esp32/components/esp_netif/include",
"//device/soc/esp/esp32/components/tcpip_adapter/include",
"//device/soc/esp/esp32/components/spi_flash/sim/stubs/freertos/include",
"//device/soc/esp/esp32/components/osal/include/esp_osal",
"//foundation/communication/wifi_lite/interfaces/wifiservice",
"//device/board/esp/esp32/liteos_m/hals/driver/wifi_lite",
"//device/soc/esp/esp32/components/driver/include/driver",
"//device/soc/esp/esp32/components/hal/include/hal"
]
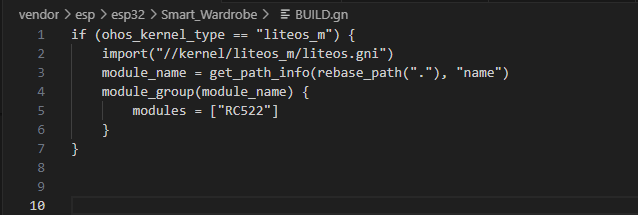
sources = [
"board_gpio.c",
"board_spi.c",
"board_mfrc522.c",
]
}编译并烧录
在源码根目录下使用hb工具对写好的代码进行编译

选择mini级系统
同理 产品选择esp公司下的esp32
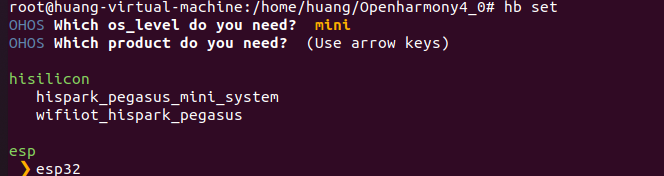
选择完毕后在源码根目录下执行hb build -f 进行编译

编译并烧录完成后,复位一下esp32。
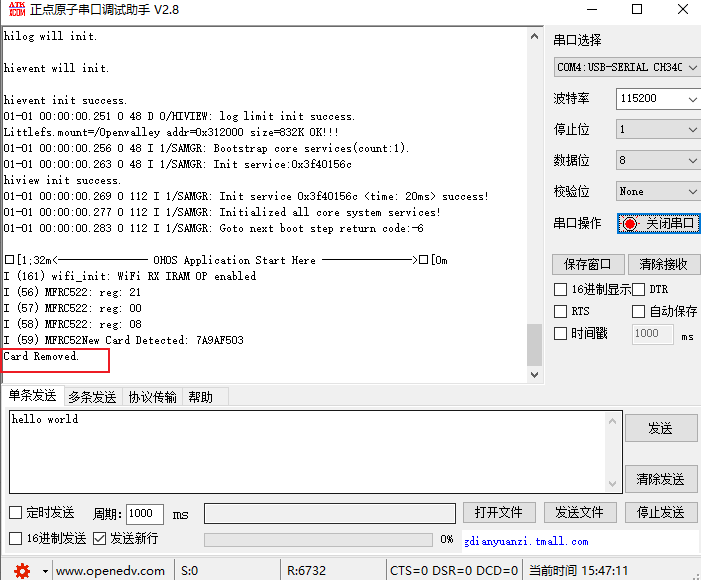
实验现象
无卡状态:
读取到IC卡
取走IC卡