ADAS智能驾驶功能
智能驾驶等级划分
按照SAE标准,自动驾驶分为5个等级。
L0:驾驶员完全负责行驶车辆;
L1:自动系统能够辅助驾驶员完成横向或纵向驾驶任务;
L2:自动系统能够完成横向和纵向等特定驾驶功能,但驾驶员需要完成剩余部分。L2级别自
动系统容许有错误的发生因为有驾驶员纠正。L2主要场景包括:环路低速堵车、高速路上的
快速行车和驾驶员在车内的自动泊车;
L3:有条件自动驾驶,自动系统能在限定条件下完成绝大部分驾驶操作,但要求突发情况下
驾驶员必须做好自动驾驶系统要求下接管车辆的准备,一般会给驾驶员提前几秒的反应时
间;
L4:在特定条件下完成全部驾驶任务;
I
L5:在所有条件下都能完成所有驾驶任务。
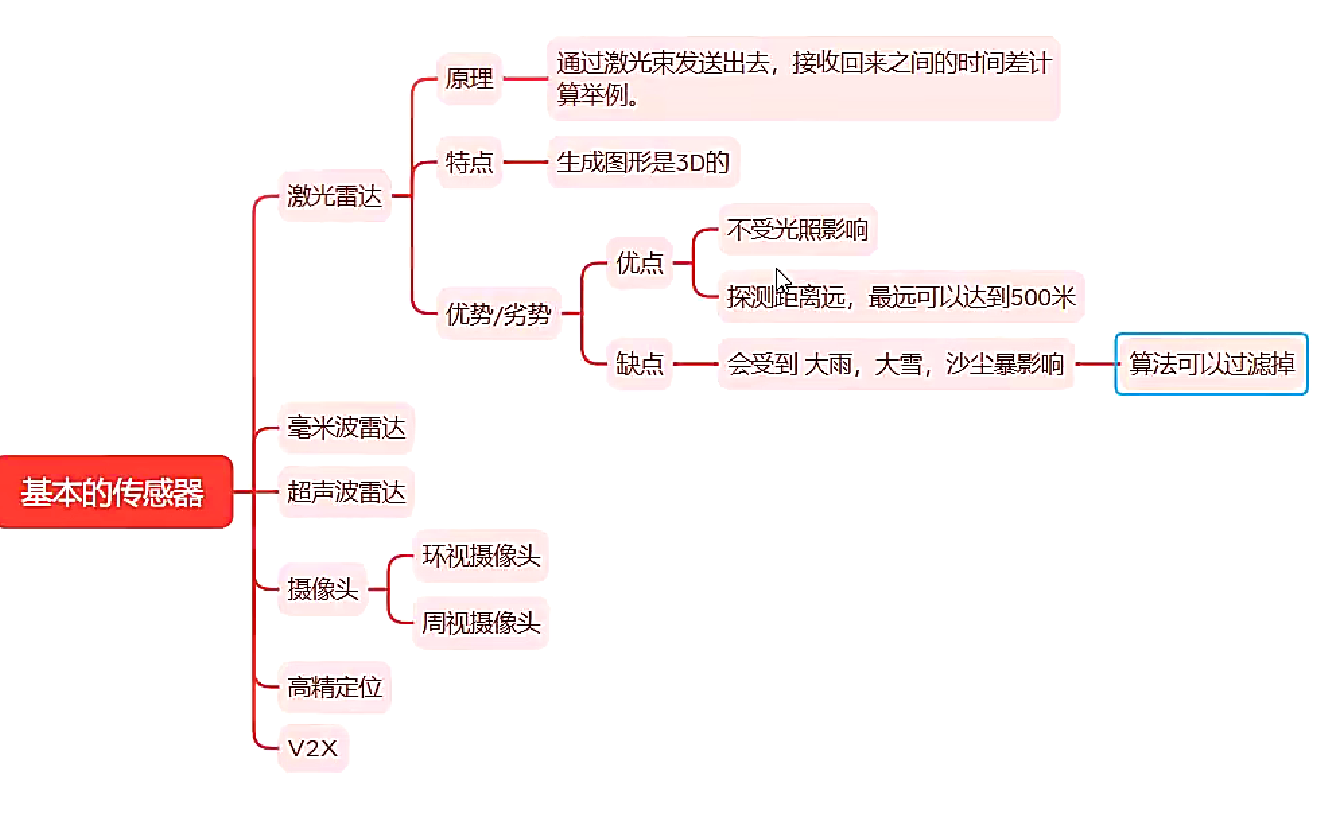
激光雷达具有以下优势:
1.高精度:激光雷达能够实现亚厘米级的距离测量精度,提供高精度的地图和目标检测能力。
2.高分辨率:激光雷达能够提供高分辨率的三维地图,捕捉目标的细节信息。
3.长距离测量:激光束具有较远的测量范围,可以在数百米到几千米的距离范围内进行测量
(汽车上安装的激光雷达在视野比较开阔的地段最高500米)。
4.高可靠性:激光雷达对光的特性具有较强的抗干扰能力,不容易受到光照环境条件的影响。
5.适应性强:激光雷达适用于各种复杂环境,包括室内、室外、白天、夜晚等不同条件下的测
量和检测。
然而,激光雷达也存在一些限制和挑战:
1.成本高昂:激光雷达的制造和维护成本较高,因此在某些应用领域可能不太经济实用。
2.盲区问题:激光雷达的测量范围有限,存在无法探测到的盲区,例如在低于地面的区域或者
目标背后。
3.多目标检测:当面对大量目标同时存在的情况时,激光雷达可能面临处理多目标的困难。
激光雷达
缺点:体积大 贵
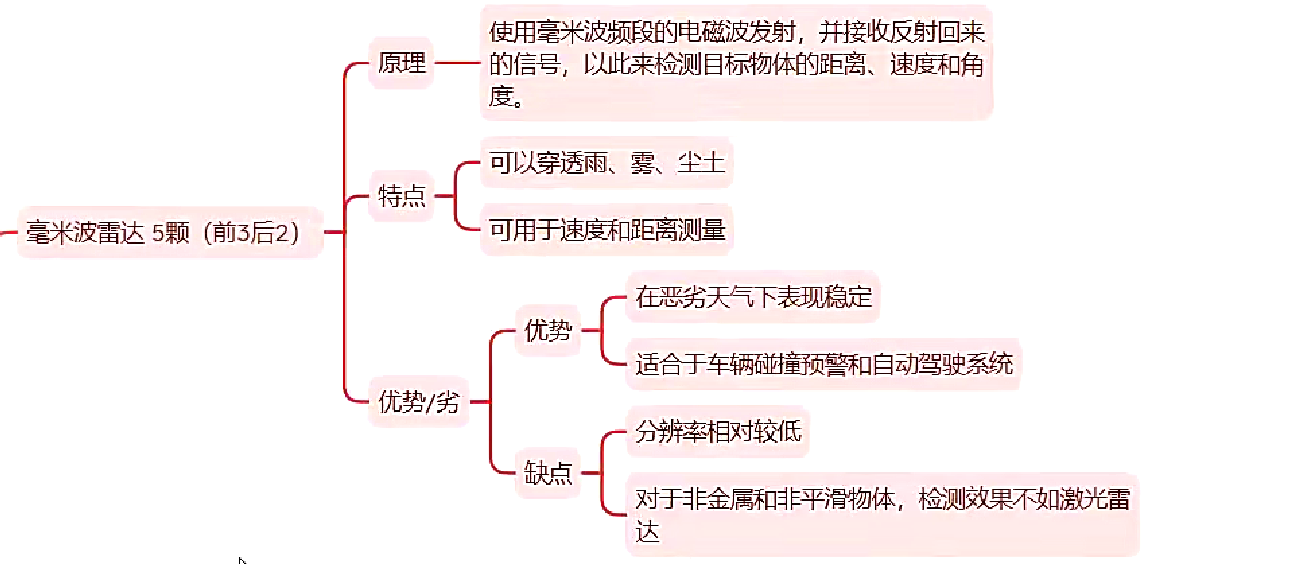
毫米波雷达
一般5颗 前3后2
毫米波雷达主要通过电磁波进行测距。发射波长为1~10mm的电磁波,接收目标的反射信号,经过处理后计算出汽车与探测范围内目标的距离、相对速度和位移方向等数据。毫米波雷达信号容易被具有相当导电性的材料
(例如金属物体)反射,且其他电磁波的干扰也会影响其性能,造成其无法对物体进行探测。
在确定被探测目标的形状方面,毫米波雷达的能力不如激光雷达。
毫米波的波长介于厘米波和光波之间,因此兼有微波制导和光电制导的优点。与厘米波导引头
相比,毫米波导引头具有体积小、质量轻和空间分辨率高的特点。在实际的交通应用中,毫米
波雷达的工作受环境变化影响较小。由于毫米波在短距离内穿透烟雾的能力较强,其在雨雪和
雾霾等恶劣条件下也能正常工作。毫米波雷达具有全天候、全气象适应性的特点,因此广泛应
用于ACC、盲区监测、主动制动等自动驾驶和辅助驾驶系统。相比激光雷达,毫米波雷达的角
度有限。例如德国大陆公司生产的ARS408毫米波雷达,其在0~20m距离内的探测角度为
±60°,在0~70m距离内的探测角度为±45°,长距离(0~100m)的探测角度仅为±9°。因此
一般在实际应用中,都需要采用多个毫米雷达进行组合使用。
超声波雷达
一般12颗