SATA协议深度剖析:从接口到指令集
目录
第一部分:开篇与基础概念
第1章:引言 - 存储技术的演进与SATA的诞生
1.1 存储接口的战国时代:PATA、SCSI、USB
1.2 PATA的局限性:为什么我们需要SATA?
1.3 SATA的诞生与设计目标:高速、简化、热插拔
1.4 SATA协议的演进历程
本章小结
第2章:SATA协议栈概述
2.1 分层设计思想:物理层、链路层、传输层、应用层
2.2 通信模型:主机(Host)与设备(Device)的点对点架构
2.3 本章小结
第二部分:物理层(Physical Layer)深度解析
第3章:电气特性与连接器
3.1 差分信号技术:为什么能抗干扰?
3.2 SATA连接器解剖:数据端口与电源端口
3.3 电源管理特性
3.4 线缆与信号完整性
本章小结
第4章:编码与OOB信号
4.1 8b/10b编码:直流平衡与内嵌时钟
4.2 OOB(带外)信号:通信的“握手”与“唤醒”
4.3 速度协商机制
本章小结
第三部分:链路层(Link Layer)核心机制
第5章:原语(Primitive) - 链路层的通用语言
5.1 什么是原语?控制字符与功能
5.2 关键原语详解
5.3 原语的发送与接收状态机
本章小结
第6章:帧结构(Frame)与CRC校验
6.1 SATA帧的完整结构
6.2 帧头(FIS)类型预览
6.3 CRC循环冗余校验:如何确保数据完整性?
本章小结
第7章:流量控制与错误恢复
7.1 基于原语的流控:X_RDY/R_RDY握手
7.2 链路错误检测
7.3 错误恢复机制:重传与链路重新初始化
7.4 综合实例:一个写操作中的完整流控与错误恢复
本章小结
第四部分:传输层与应用层(Transport/Application Layer)
第8章:帧信息结构(FIS)详解
8.1 FIS:主机与设备间的“信封”
8.2 寄存器 - 主机到设备 FIS (H2D FIS)
8.3 寄存器 - 设备到主机 FIS (D2H FIS)
8.4 数据 FIS
8.5 DMA 激活 FIS
8.6 其他FIS类型
本章小结
第9章:SATA指令集与命令执行流程
9.1 ATA/ATAPI命令集概览
9.2 一个完整的读写命令生命周期
9.3 关键命令深度解析
本章小结
第五部分:高级特性与性能优化
第10章:原生命令队列(NCQ)
10.1 为什么需要NCQ?机械硬盘的寻道瓶颈
10.2 NCQ的工作原理:队列、乱序执行、完成重排序
10.3 一个NCQ读操作的综合流程
10.4 NCQ对固态硬盘(SSD)的意义
本章小结
第11章:热插拔与电源管理
11.1 热插拔硬件支持
11.2 软件与驱动对热插拔的处理
11.3 SATA电源状态
11.4 实际应用场景
11.5 热插拔与电源管理的协同工作
本章小结
第12章:端口 multipliers 与端口选择器
12.1 端口 multiplier (PM):一个端口如何连接多个设备?
12.2 端口选择器:实现冗余与高可用
12.3 高级特性与配置
12.4 实际部署考虑
12.5 综合应用实例:中小企业存储解决方案
本章小结
第六部分:协议分析、调试与未来
第13章:SATA协议分析实战
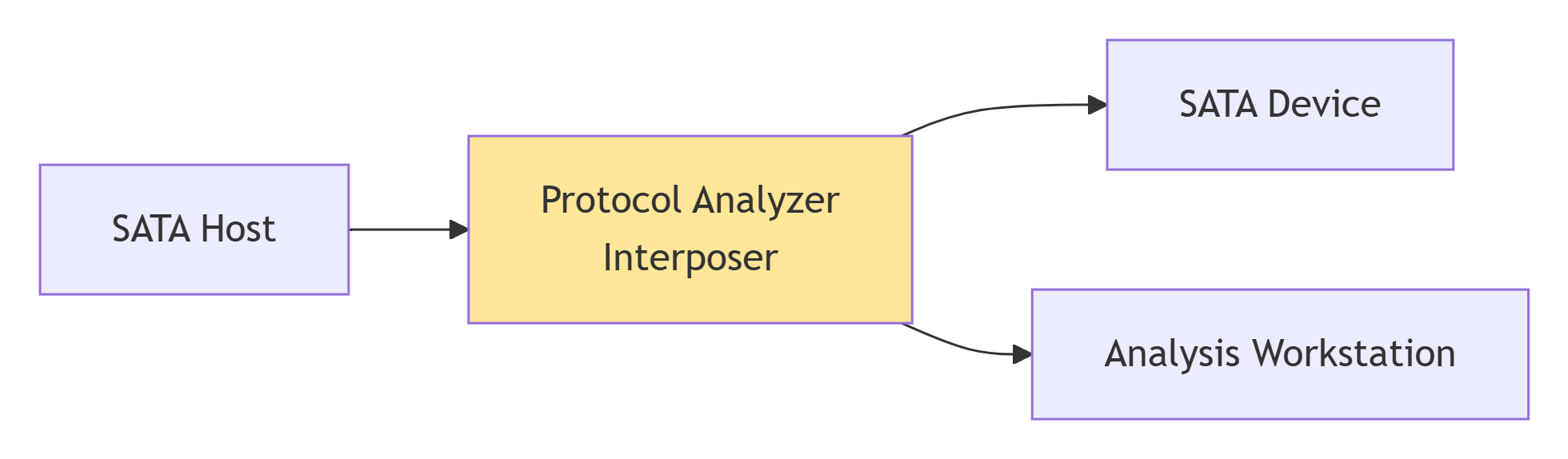
13.1 使用协议分析仪捕获SATA流量
13.2 解码一个真实的读写操作
13.3 常见故障的协议级表现与分析思路
13.4 高级调试技巧
13.5 实际案例研究
本章小结
第14章:SATA与NVMe的对比及未来展望
14.1 架构的根本差异:AHCI vs. PCIe
14.2 性能瓶颈分析:为什么NVMe更快?
14.3 SATA与NVMe全方位对比
14.4 SATA的定位与未来:在NVMe时代的价值
14.5 SATA与NVMe的协同发展
14.6 对开发者和IT专业人员的建议
本章小结
第15章:总结与存储技术未来展望
15.1 SATA协议设计哲学回顾
15.2 关键知识点总结
15.3 SATA的历史地位与遗产
15.4 存储技术未来展望
15.5 对技术人员的建议
15.6 结语:永恒的价值
附录
附录A:SATA FIS类型完整列表
附录B:ATA命令集速查表
基本ATA命令
设备管理和控制命令
高级功能和特性命令
识别和信息命令
安全特性命令
附录C:术语表
附录D:SATA线缆和连接器规格
数据线缆规格
电源连接器规格
机械特性
附录E:SATA版本特性对比详细表
附录F:常见问题解答(FAQ)
附录G:参考文献和进一步阅读
官方标准文档
推荐书籍
在线资源
技术白皮书
工具和软件
第一部分:开篇与基础概念
第1章:引言 - 存储技术的演进与SATA的诞生
在数字世界的肌理之下,流淌着数据的血液。而存储系统,便是承载这生命之血的心脏与血管。中央处理器(CPU)负责思考,内存(RAM)负责短时记忆,而存储设备则承载着我们所有的知识、记忆与数字遗产。本章将带您穿越时空,回到那个存储接口“战国时代”的尾声,探寻Serial ATA(SATA)技术为何能脱颖而出,成为过去近二十年间个人计算与数据中心存储不可或缺的基石。
1.1 存储接口的战国时代:PATA、SCSI、USB
在SATA一统江湖之前,存储世界是一个多标准并存、各自为战的“战国时代”。
1. PATA - 旧日的王者
PATA,即并行ATA(Parallel ATA),也被广泛称为IDE(Integrated Drive Electronics)。它是上世纪80年代末至21世纪初个人计算机的绝对主流存储接口。
-
技术特点:如其名“并行”所示,PATA使用一条宽阔的40针或80线的扁平排缆,在同一时钟周期内同时传输多位数据(最初为16位)。这就像一条拥有16个车道的超宽马路,所有车辆(数据位)并驾齐驱,试图同时到达终点。
-
局限性初现:
-
信号干扰(Crosstalk):当数据速率提升时,并行的数据线之间会产生严重的电磁干扰,就像并排高速行驶的车辆会互相影响气流。为了解决这个问题,后续引入了80线的电缆,其中40线用于接地屏蔽,以减轻干扰。
-
时钟偏移(Clock Skew):确保所有16位数据在同一时刻准确到达接收端变得极其困难。信号在电缆中传输的速度有细微差异,导致一些位“跑得快”,一些位“跑得慢”。在高速下,这种偏移会导致数据读取错误。这好比一场赛跑,发令枪响后,所有运动员本应同时冲出,但实际上反应有快有慢,到达终点的时间也不再整齐。
-
庞大的连接器:40针的连接器体积巨大,不利于机箱内部空气流通和线缆管理。
-
主从架构:一条PATA线缆可以连接两个设备(一个主设备,一个从设备)。但两个设备无法同时进行数据传输,共享带宽,且需要手动设置跳线帽来配置主从关系,对用户不友好。
-
2. SCSI - 企业级的精英
SCSI(Small Computer System Interface,小型计算机系统接口)是另一个强大的并行接口,主要面向服务器、工作站和高性能计算领域。
-
技术特点:SCSI支持更复杂的拓扑结构(如菊花链),可以连接多达16个设备(包括硬盘、扫描仪、磁带机等)。它拥有独立的控制器,CPU占用率低,命令集也更丰富强大。
-
定位与局限:SCSI性能强劲,但成本高昂。其接口卡、线缆和设备都价格不菲,如同专业领域的特种车辆,性能卓越但并非为普通家庭用户设计。
3. USB - 通用的外设连接者
在SATA诞生之初,USB(Universal Serial Bus)主要专注于外部设备连接。它的目标是简化PC与键盘、鼠标、打印机等外设的连接。
-
技术特点:USB是串行、通用的总线,支持热插拔。早期USB 1.1和2.0的速率远低于同时代的PATA,且其协议开销较大,延迟不高,并不适合作为内置存储的首选接口。
-
定位:USB更像是连接外部世界的“国道”,方便灵活,但初期在速度和效率上不适合承担系统主存储的重任。
这个“战国时代”的局面,催生了对一种新的、更先进的存储接口的迫切需求。
1.2 PATA的局限性:为什么我们需要SATA?
随着CPU性能的飞速提升和应用程序对数据需求的爆炸式增长,PATA的瓶颈日益凸显,成为了整个计算机系统的“短板”。其局限性可以总结为以下几点:
-
并行架构的物理极限:正如前文所述,信号干扰和时钟偏移问题在追求更高速度时变得无法克服。PATA的终极版本ATA/133理论速率达到133 MB/s,这几乎已经是并行技术在成本和实用性上所能达到的极限。想要再提升,犹如在一条已经拥挤不堪的宽阔马路上继续增加车道,管理难度和成本将呈指数级上升。
-
巨大的布线难度与糟糕的散热:80线的宽大排缆非常僵硬,在紧凑的机箱内难以弯折,严重阻碍了空气流动,影响散热。这对于追求高密度和良好散热的现代PC和服务器来说是致命的。
-
低效的架构:主从模式共享带宽,且不支持原生的热插拔功能,无法满足服务器需要高可用性和灵活维护的需求。
是时候做出改变了。这个改变的核心思路,就是从“并行”转向“串行”。
这个转变可以用一个生动的比方来理解:
-
PATA(并行):好比一条拥有16个车道的混合通行高速公路。所有车辆(数据位)同时出发,但需要严格同步。一旦车速(信号时序)不一致,或者车辆之间互相干扰(串扰),就容易发生交通事故(数据错误)。而且,这条公路只能服务两个出口(两个设备),效率低下。
-
SATA(串行):则像一座设计精良的单向立交桥。它只有一对核心车道(一对差分信号线用于发送,一对用于接收),但通过极高的通行频率(高时钟速率)和智能的交通规则(先进的编码协议),让车辆(数据位)一辆接一辆地以极高速率通过。由于是单向通行,没有对向车流的干扰;由于是点对点,每座立交桥只服务一个目的地(一个设备),独占带宽,互不干扰。
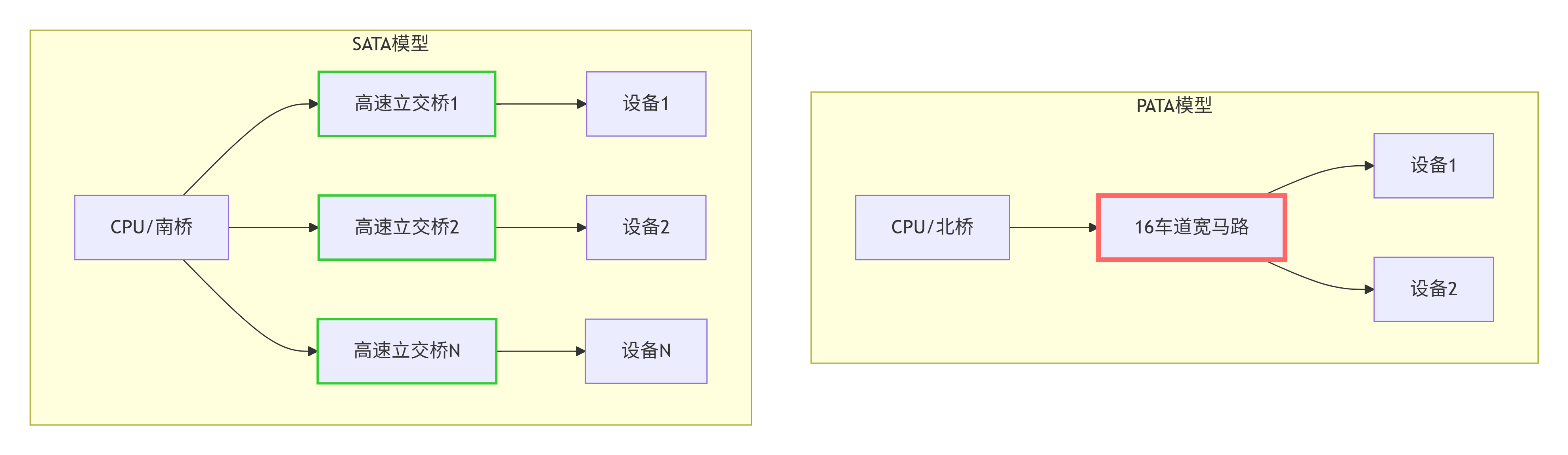
这个从“宽马路”到“立交桥”的转变,带来了革命性的优势。
1.3 SATA的诞生与设计目标:高速、简化、热插拔
面对PATA的重重困境,由Intel领导的“Serial ATA Working Group”于2000年成立,旨在制定下一代存储接口标准。SATA 1.0规范于2001年正式发布。其设计目标非常明确:
-
高性能:
-
起点即为150 MB/s(SATA 1.0),高于当时主流的PATA ATA/100。并且规划了清晰的升级路径:300 MB/s(SATA 2.0),600 MB/s(SATA 3.0)。
-
采用点对点架构,每个设备独享全带宽,彻底解决了PATA共享带宽的问题。
-
-
简化布线:
-
数据线从80根减少到仅有7根(包含2对差分线和3根地线),线缆细长、柔软、易于弯曲。
-
细线缆改善了机箱内部空气流通,为高性能显卡和CPU的散热创造了有利条件。
-
-
支持热插拔:
-
这是SATA从设计之初就支持的重要特性,虽然其在普通台式机中不常用,但在服务器和外部存储柜中至关重要,允许管理员在不关闭系统的情况下更换故障硬盘。
-
-
降低电压,改进连接器:
-
信号电压从PATA的5V降低到SATA的500mV,降低了功耗和电磁辐射。
-
引入了“L”型防呆设计的连接器,避免了误插的可能。同时,将数据接口和电源接口分离并重新设计,提供了更稳定的供电。
-
1.4 SATA协议的演进历程
SATA协议自诞生以来,经历了数个主要版本的迭代,每一次都带来了性能的提升和功能的完善。
| 版本 | 官方名称 | 发布年份 | 理论传输速率 | 编码方式 | 有效带宽(近似) | 关键新特性 |
|---|---|---|---|---|---|---|
| SATA 1.0 | SATA Revision 1.x | 2001 | 1.5 Gb/s | 8b/10b | 150 MB/s | 基础规范,点对点,细线缆 |
| SATA 2.0 | SATA Revision 2.x | 2004 | 3.0 Gb/s | 8b/10b | 300 MB/s | 原生命令队列(NCQ),端口复用器 |
| SATA 3.0 | SATA Revision 3.x | 2009 | 6.0 Gb/s | 8b/10b | 600 MB/s | 更高速度,为SSD优化(但未完全满足) |
| SATA 3.1 | SATA Revision 3.1 | 2011 | 6.0 Gb/s | 8b/10b | 600 MB/s | SATA Express接口雏形,设备休眠(DEVSLP) |
| SATA 3.2 | SATA Revision 3.2 | 2013 | 6.0 Gb/s | 8b/10b | 600 MB/s | 正式定义SATA Express,USM接口 |
| SATA 3.3 | SATA Revision 3.3 | 2016 | 6.0 Gb/s | 8b/10b | 600 MB/s | 电源禁用特性,重叠磁记录技术支持 |
| SATA 3.4 | SATA Revision 3.4 | 2018 | 6.0 Gb/s | 8b/10b | 600 MB/s | 设备温度监控,改进的电源管理 |
演进脉络解读:
-
SATA 1.0 成功打开了市场,证明了串行架构的优越性。
-
SATA 2.0 是一个里程碑,其引入的原生命令队列(NCQ) 是机械硬盘性能的一大福音。它允许硬盘对收到的多个读写命令进行智能重新排序,优化磁头运动路径,显著减少了寻道时间,提升了效率。
-
SATA 3.0 将速率提升至6.0 Gb/s,主要是为了应对即将到来的固态硬盘(SSD)时代。尽管后来发现SATA接口本身仍是高端SSD的瓶颈,但它足以满足主流SSD和所有机械硬盘的需求。
-
SATA 3.1及之后 的版本,速率未再提升,主要专注于功耗管理、特定功能增强(如SATA Express试图桥接SATA与PCIe)和维护性更新。这表明SATA协议在达到600 MB/s后,其发展重点从“提速”转向了“精细化运营”和“功能扩展”。
本章小结
本章我们回顾了存储接口从“并行”到“串行”的历史性转折。我们看到了PATA等传统接口在性能、物理设计和功能上的局限性,正是这些局限性催生了SATA的诞生。SATA以其点对点的串行架构、简化的线缆设计、对热插拔的原生支持以及清晰的性能演进路线图,成功地取代了PATA,成为了一个时代的存储标准。在接下来的章节中,我们将如同拆解一台精密的钟表一般,层层深入地剖析SATA协议的每一个技术细节,从物理层的电气信号开始,直至高层的命令交互。
第2章:SATA协议栈概述
要深入理解SATA协议,就像要读懂一本复杂的法典,必须先了解它的篇章结构。SATA协议采用了一种经典的分层设计模型,将复杂的功能分解到不同的逻辑层次中,每一层都各司其职,并通过标准的接口与上下层进行交互。这种设计使得协议的实现、调试和演进都变得更为清晰和模块化。
本章将为您勾勒出SATA协议栈的完整蓝图,让您在深入每一层的技术细节之前,先建立起一个整体的认知框架。
2.1 分层设计思想:物理层、链路层、传输层、应用层
SATA协议栈主要分为四个层次,从下到上依次是:物理层(Physical Layer)、链路层(Link Layer)、传输层(Transport Layer) 和应用层(Application Layer)。这种分层结构与网络通信中的OSI七层模型或TCP/IP四层模型有异曲同工之妙。
每一层都为其上层提供服务,并依赖其下层提供服务。这种“服务”可以理解为一种约定好的功能和接口。
各层核心功能简介:
-
物理层
-
职责:负责处理最底层的电气信号和机械连接。它包括发送器和接收器电路、连接器、线缆等。
-
关键任务:
-
将数字比特流转换为物理线上的差分电信号,以及反向转换。
-
使用8b/10b编码,确保数据流具有足够的时钟信息并实现直流平衡。
-
管理初始化和速度协商过程,通过发送OOB(带外)信号(如COMRESET, COMINIT)来建立连接。
-
-
比方:物理层就像是国家的道路基础设施建设部门。他们负责铺设公路(线缆)、制定交通信号灯的标准(电气特性)、以及确保路基平整(信号完整性)。他们不关心车上装的是什么货物(数据内容),只关心道路本身是否通畅、标准。
-
-
链路层
-
职责:在物理层建立的稳定连接之上,负责数据帧的可靠传递。它管理着主机与设备之间的“对话”规则。
-
关键任务:
-
定义和解释原语(Primitive)。原语是控制通信状态的短命令,如
X_RDY(发送端就绪)、R_RDY(接收端就绪)。 -
将传输层交付的数据打包成帧(Frame),并为帧添加开始(SOF)和结束(EOF)标记。
-
计算并验证循环冗余校验(CRC) 值,确保帧在传输过程中没有出错。
-
实施流量控制,通过原语握手防止数据溢出。
-
-
比方:链路层就像是交通警察和快递分拣中心。交警通过手势(原语)指挥车辆何时可以通行(流量控制)。分拣中心负责将货物(数据)打包成标准的集装箱(帧),并贴上防伪封条(CRC)。如果封条破损,他们就要求重发。
-
-
传输层
-
职责:负责将上层(应用层)的命令和数据封装成一种叫做FIS(Frame Information Structure,帧信息结构) 的标准化“信封”,或者从接收到的FIS中解析出命令和数据。
-
关键任务:
-
生成和解析各种类型的FIS,如寄存器FIS(用于发送命令)、数据FIS(用于传输数据块)、DMA激活FIS等。
-
管理FIS在主机与设备之间的传递顺序和状态。
-
-
比方:传输层就像是公司的商务信函处理部门。他们负责将高层的商业指令(如“采购100吨原料”)按照标准的商业信函格式(FIS)书写,装入信封,然后交给快递(链路层)。他们也负责拆阅来自合作伙伴的回信,并提取核心信息上报给高层。
-
-
应用层
-
职责:这是协议栈的最高层,直接与操作系统或驱动程序交互。它实现了具体的存储设备命令集,如ATA命令集或ATAPI命令集。
-
关键任务:
-
接收来自操作系统的读写等命令。
-
管理设备的状态寄存器。
-
对于硬盘,实现具体的读写缓存、SMART监控等功能。
-
-
比方:应用层就像是公司的首席执行官(CEO)或核心业务部门。他们做出“卖出产品A”、“购入原料B”的决策(ATA命令)。他们不关心信函具体怎么寄送(传输层以下),只关心商业决策本身及其结果。
-
2.2 通信模型:主机(Host)与设备(Device)的点对点架构
与它的前任PATA(多设备共享总线)截然不同,SATA采用了一种纯粹的点对点(Point-to-Point) 通信模型。
-
一对一连接:每一个SATA端口(通常在主板南桥或独立HBA卡上)通过一根专用的SATA线缆,直接连接一个SATA设备(硬盘、光驱等)。
-
独占带宽:每个设备都独享其端口的全部带宽。在SATA 3.0系统中,连接在端口1的硬盘和连接在端口2的硬盘都可以同时以最高600 MB/s的速率传输数据,互不干扰。
-
简化设计:这种架构消除了总线仲裁和主从设置的复杂性,使得控制器设计和驱动实现都变得更加简单。
通信流程概览
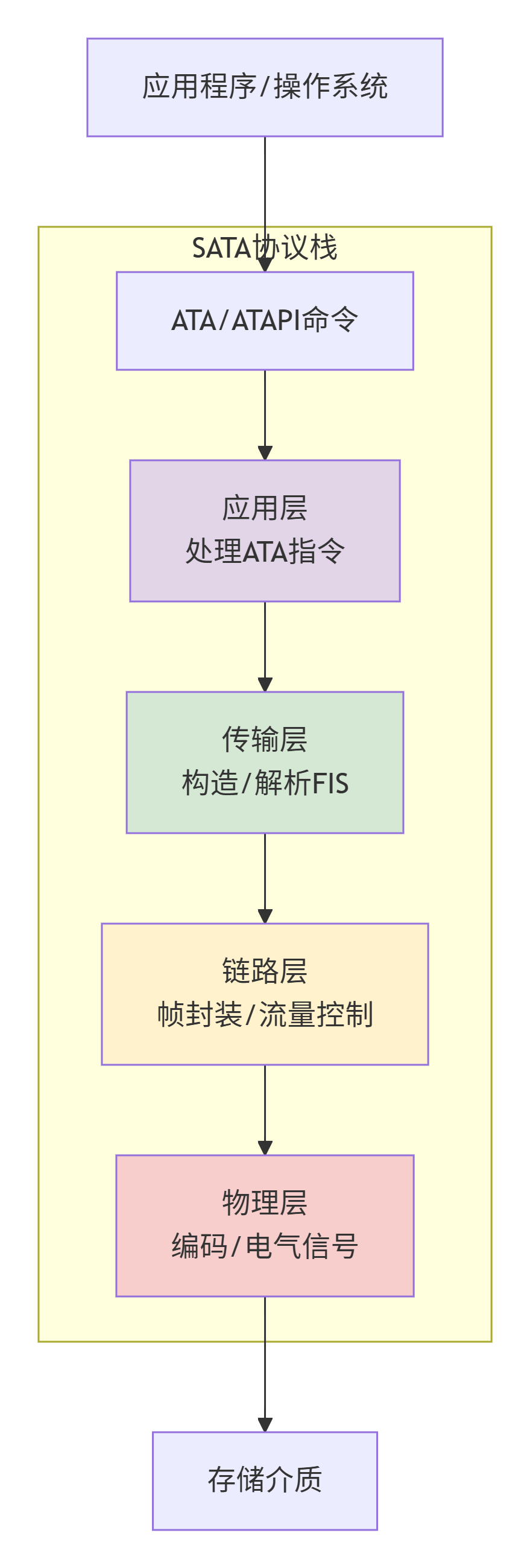
让我们通过一个简化的“读取数据”请求,来直观感受一下数据在各层之间的流动过程。
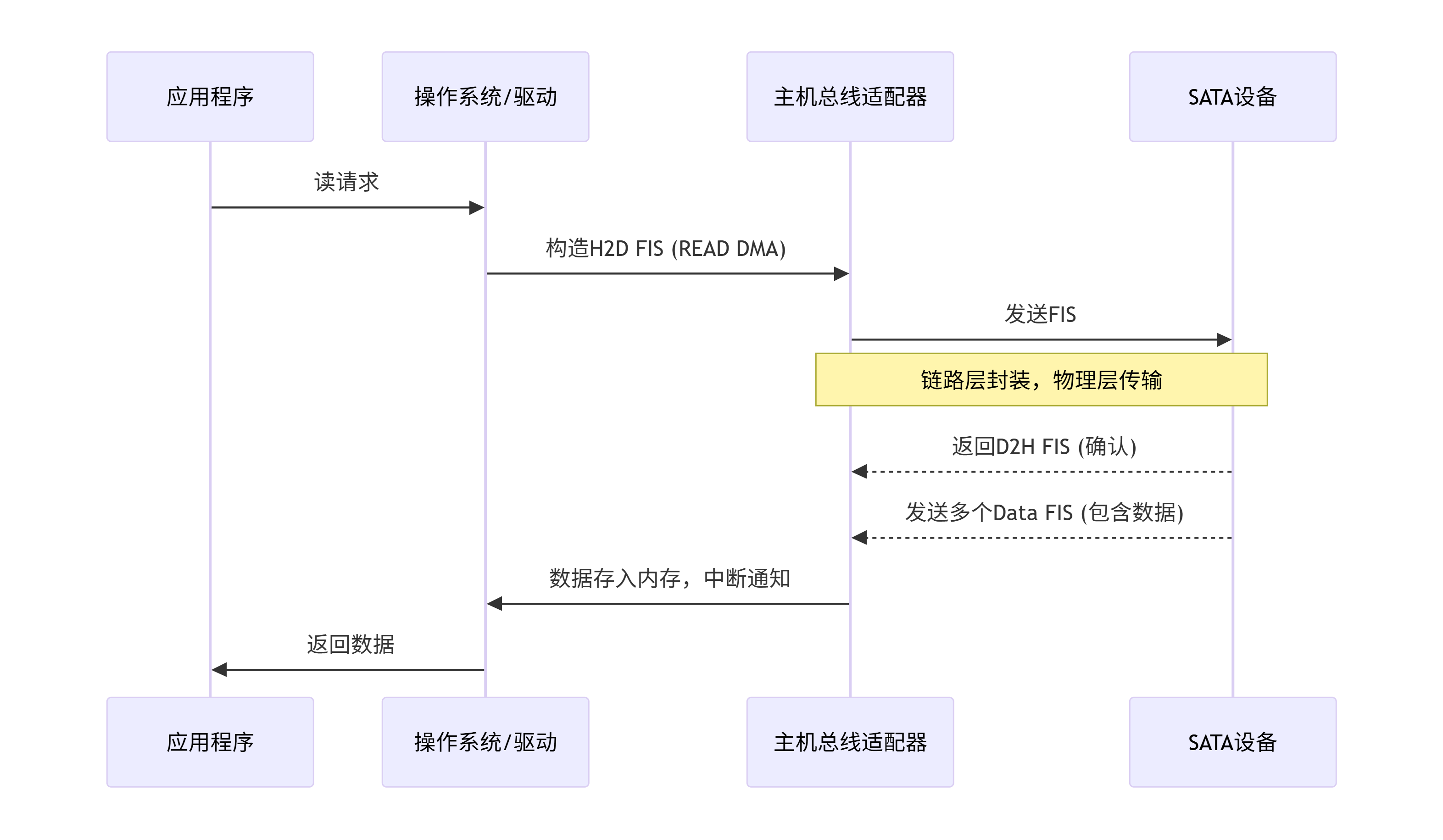
这个流程图清晰地展示了一个“自上而下,再自下而上”的完整循环。命令从主机的应用层出发,逐层封装,最终变为物理线上的信号;数据则从设备端返回,在主机端被逐层解析,最终交付给应用程序。
2.3 本章小结
本章我们建立了SATA协议的整体架构视图。我们了解到,SATA协议通过物理层、链路层、传输层和应用层四层分治的模式,将复杂的存储通信任务分解为易于管理和实现的模块。同时,我们明确了SATA点对点的通信模型,这是其高性能和简化设计的基础。
第二部分:物理层(Physical Layer)深度解析
第3章:电气特性与连接器
物理层是SATA协议栈的基石,它定义了数据如何从“0”和“1”的数字世界,转换为在物理线缆中流动的实实在在的电流与电压。这一层不关心数据的含义,只负责确保这些比特能够准确、高效地从一端传递到另一端。如果说上层协议是精妙的语言和语法,那么物理层就是承载这些语言的声带与空气振动。
3.1 差分信号技术:为什么能抗干扰?
在高速数字通信中,最大的敌人之一是噪声。无论是来自外部设备的电磁辐射,还是线缆内部信号之间的串扰,都可能导致接收端误判“0”为“1”,或者反之。SATA采用了差分信号 这一经典且高效的技术来对抗噪声。
3.1.1 差分信号的工作原理
差分信号使用两根信号线来传输一个数据位。这两根线通常紧密地绞合在一起(构成一对差分对):
-
正相信号(T+ 和 R+)
-
反相信号(T- 和 R-)
发送端会产生两个幅度相等、相位相反的信号。当要发送逻辑‘1’时,T+电压升高,T-电压降低;当要发送逻辑‘0’时,T+电压降低,T-电压升高。
接收端并不关心对地的绝对电压值,而是通过一个差分放大器,专门检测这两根线之间的电压差。
-
V_diff = V(T+) - V(T-) -
如果
V_diff为正且超过某个阈值,则判为逻辑‘1’。 -
如果
V_diff为负且低于某个阈值,则判为逻辑‘0’。

3.1.2 差分信号的抗噪声魔力
从上图和工作原理中,我们可以揭示其抗干扰能力的奥秘:
-
共模噪声抑制:任何外部的电磁干扰(噪声)在到达这两根紧密并行的导线时,会几乎完全相同地耦合到两根线上。假设噪声电压为
V_noise,那么接收端收到的信号变成了:-
R+ = T+ + V_noise
-
R- = T- + V_noise
-
差分放大器计算:
(T+ + V_noise) - (T- + V_noise) = T+ - T- -
噪声
V_noise被完美地抵消了!
-
-
比方:想象两个人在抬一个沉重的、对称的轿子。轿子本身的重量(有用信号)是通过两人一前一后的力量差来感知的。如果路上遇到一阵侧风(噪声),它同时吹在两人身上,虽然每个人都感受到了额外的推力,但他们之间用力的相对差异并没有改变,因此轿子依然平稳前行。接收端就像轿子,只关心两者的力量差,而不关心每个人具体用了多大力气。
-
其他优势:
-
更低的电磁辐射:由于T+和T-上的电流方向相反,它们产生的磁场会相互抵消,从而减少了对外界的电磁干扰。
-
更低的信号电压:由于接收器对电压差敏感,而不是绝对电压,因此可以使用更低的信号幅度(SATA典型值为500mV)。这降低了功耗,并允许更高的切换速度。
-
3.2 SATA连接器解剖:数据端口与电源端口
SATA的连接器设计是其成功的关键因素之一,它实现了小型化、易用性和高可靠性。
3.2.1 数据连接器(7针)
SATA数据线缆使用细长的7针连接器,其引脚定义如下:
| 引脚 | 功能 | 说明 |
|---|---|---|
| 1 | GND | 接地,为信号提供参考地。 |
| 2 | A+ | 差分信号对A,正向(发送) |
| 3 | A- | 差分信号对A,反向(发送) |
| 4 | GND | 接地 |
| 5 | B- | 差分信号对B,反向(接收) |
| 6 | B+ | 差分信号对B,正向(接收) |
| 7 | GND | 接地 |
-
关键特点:
-
点对点收发分离:拥有独立的发送对(A+, A-)和接收对(B+, B-),实现了全双工通信的物理基础。主机和设备可以同时发送和接收数据。
-
三次接地:多个接地引脚穿插在信号线之间,提供了良好的屏蔽,进一步减少了信号线之间的串扰。
-
“L”型防呆设计:连接器呈直角“L”形,确保只能以一个方向插入,避免了像PATA那样插反或插错针的可能。
-
盲插设计:连接器通常带有轻微的弹性和导向槽,即使看不见接口,也能通过手感“咔哒”一声插入到位。
-
3.2.2 电源连接器(15针)
SATA设备使用一个全新的15针电源连接器,取代了PATA时代的4针“D型”接口。
| 引脚 | 功能 | 引脚 | 功能 | 引脚 | 功能 |
|---|---|---|---|---|---|
| 1 | +3.3V | 6 | +3.3V | 11 | 预充电/保留 |
| 2 | +3.3V | 7 | +5V | 12 | GND |
| 3 | +3.3V | 8 | +5V | 13 | GND |
| 4 | GND | 9 | +5V | 14 | GND |
| 5 | GND | 10 | GND | 15 | +12V |
-
关键特点:
-
多电压支持:直接提供+3.3V, +5V, +12V三种电压,满足不同设备的需求。
-
冗余引脚:每种电压和地线都有多个引脚,目的是提供更大的电流承载能力,降低接触电阻和压降。
-
热插拔支持:
-
预充电引脚:第11号引脚(以及相邻的1、4、7、10号引脚)在物理上比其他引脚更长。在插入过程中,地线和预充电引脚会先接触,为设备内部的电容进行预充电,释放掉残余电荷,然后电源引脚才接通。这防止了插入时产生电火花和电流冲击,是实现安全热插拔的关键。
-
比方:这就像在打开大型水闸之前,先打开一个小旁通阀,让水道两侧的水压先平衡一下,再完全开启,避免巨大的水锤冲击。
-
-
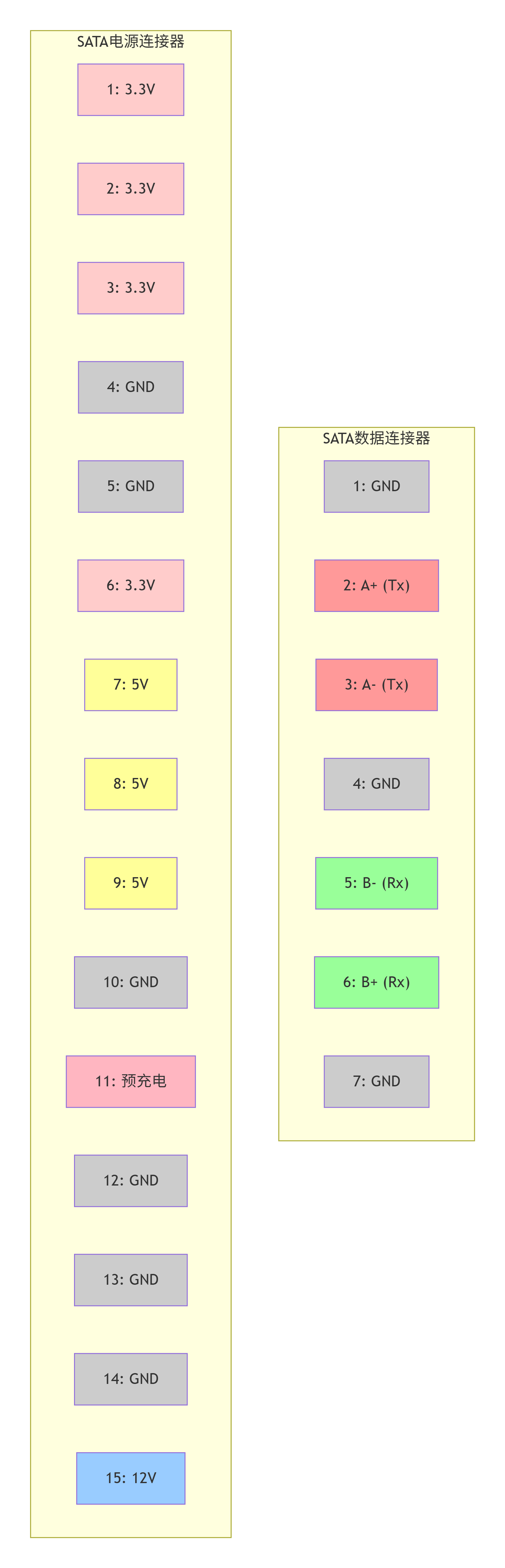
(图注:SATA数据与电源连接器引脚示意图,不同颜色代表不同功能)
3.3 电源管理特性
SATA定义了灵活的电源状态以节省能耗,这在移动设备和数据中心中尤为重要。这些状态主要通过物理层和上层的协作来实现。
-
Partial/Slumber:这些是低功耗状态,通过物理层发送特定序列的原语(如
PMNAK,PMAK)来进入和退出。它们降低了物理层电路的活跃度,但恢复速度相对较快。 -
DEVSLP (Device Sleep):这是SATA 3.2引入的更深度的睡眠状态,功耗极低。它需要电源和设备的共同支持,通过一个特定的引脚(DEVSLP)信号来触发,可以将设备功耗降低到几乎为零。
3.4 线缆与信号完整性
-
长度限制:SATA规范规定线缆最大长度为1米。超过这个长度,信号衰减和失真会变得严重,导致误码率上升。
-
材质与屏蔽:高质量的SATA线缆使用多股细铜线以保持柔软性,并有完整的金属编织网和箔片屏蔽层,以抵御外部干扰。线缆越粗,屏蔽越好,通常质量也越高。
-
锁定机制:一些高质量的SATA线缆和数据接口带有机械锁定装置(如金属卡扣),可以防止因振动或意外拉扯导致的连接中断,在服务器环境中尤其重要。
本章小结
本章我们深入到了SATA协议的最底层——物理层。我们了解了差分信号如何以其卓越的共模噪声抑制能力,成为高速串行通信的基石;我们解剖了7针数据连接器和15针电源连接器的精密设计,看到了它们如何通过点对点、全双工、防呆和热插拔支持等特性,彻底超越了PATA;我们还简要探讨了电源管理和线缆质量对信号完整性的影响。
物理层为我们建立了一条可靠、高速的比特流传输通道。在下一章中,我们将上升一层,进入链路层,看看这些原始的比特流如何被组织成有意义的“词语”(原语)和“句子”(帧),并建立起一套有序的对话规则。
第4章:编码与OOB信号
在物理层,仅仅有差分信号来对抗干扰是远远不够的。我们还需要解决两个关键问题:第一,接收端如何从连续的比特流中准确地找出每个比特的开始和结束?第二,在正式通信开始之前,主机和设备如何"打招呼"来建立连接?本章将解答这两个问题,深入探讨8b/10b编码和OOB(带外)信号,它们是SATA物理层通信的"语法"和"暗号"。
4.1 8b/10b编码:直流平衡与内嵌时钟
数字信号在物理介质上传输时,如果长时间保持高电平(连续的‘1’)或低电平(连续的‘0’),会带来两个主要问题:
-
时钟恢复困难:接收端需要根据数据的跳变沿来同步其本地时钟。如果数据长时间不跳变,接收端时钟可能会发生漂移,导致比特判据错误。
-
直流偏移(DC Bias):传输线有耦合电容,如果‘0’和‘1’的数量长期不平衡,会导致信号基线漂移,影响接收灵敏度。
SATA采用的8b/10b编码 就是为了解决这些问题而生的。
4.1.1 编码原理:从8位到10位
顾名思义,8b/10b编码将8位的数据字节转换为10位的传输字符。这看似增加了20%的额外开销(这也是为什么SATA 3.0的6.0 Gb/s线速率只能提供600 MB/s有效带宽的原因),但它带来了至关重要的好处。
-
内嵌时钟:通过精心设计的编码表,8b/10b编码确保无论输入什么数据,生成的10位字符中‘0’和‘1’的数量都不会相差太多,并且连续的‘0’或‘1’不会超过5个。这保证了信号有足够多的跳变,便于接收端提取时钟。
-
直流平衡:编码机制还跟踪一个称为运行差异(Running Disparity, RD) 的参数。RD表示至今已发送的‘1’比‘0’多还是少。对于同一个8位数据,编码器会根据当前的RD值,从两个可能的10位编码中选择一个,以使总的‘1’和‘0’的数量趋向平衡。
4.1.2 编码过程详解
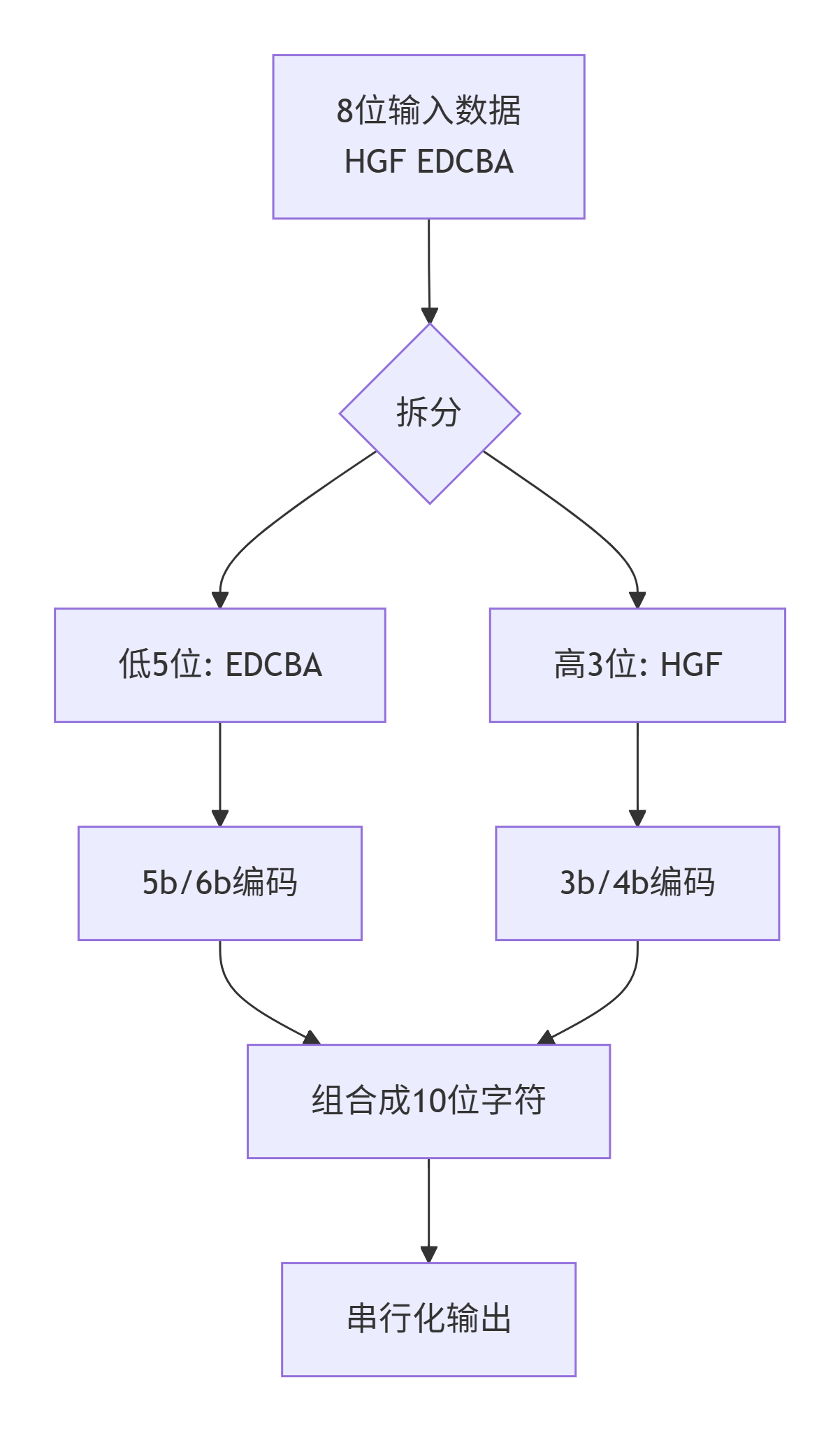
8b/10b编码将8位数据HGF EDCBA(其中H为最高位)分为两部分:
-
低5位:
EDCBA-> 编码成6位,称为5b/6b编码。 -
高3位:
HGF-> 编码成4位,称为3b/4b编码。
最终组合成一个10位的字符。
举个例子:假设我们要编码一个8位数据D10.2(在8b/10b术语中,D表示数据,10是十进制值,2是控制位?实际上标准表示是Dxx.y。我们以控制字符K28.5为例,因为它常用于数据对齐)。
-
K28.5的二进制原值为
8'b10111100(或8‘hBC)。 -
经过5b/6b和3b/4b查表编码后,根据运行差异RD,它会得到两个10位结果之一:
-
当 RD = -1 时,输出
10‘b0011111010 -
当 RD = +1 时,输出
10‘b1100000101
-
请注意观察这两个结果:
-
它们都没有超过5个连续的‘1’或‘0’。
-
第一个结果有5个‘1’和5个‘0’(差异为0),第二个结果有4个‘1’和6个‘0’(差异为-2)。编码器通过选择,使运行差异在正负之间摆动,长期保持平衡。
4.1.3 特殊字符:K字符
除了256个数据字符(Dxx.y),8b/10b还定义了12个特殊控制字符(Kxx.y)。这些K字符无法作为数据出现,因此它们被用作原语(Primitive) 的组成部分,成为链路层的"控制命令"。例如,我们后面会遇到的ALIGN原语就由连续的K28.5 D10.2字符组成。接收端一旦检测到K28.5这个特殊的、数据中不会出现的模式,就知道这是一个控制信号,而不是普通数据。
4.1.4 有效带宽计算
由于8b/10b编码,SATA的有效数据传输率是标称比特率的80%。
-
SATA 1.0: 1.5 Gb/s * 0.8 = 1.2 Gb/s = 150 MB/s
-
SATA 2.0: 3.0 Gb/s * 0.8 = 2.4 Gb/s = 300 MB/s
-
SATA 3.0: 6.0 Gb/s * 0.8 = 4.8 Gb/s = 600 MB/s
4.2 OOB(带外)信号:通信的“握手”与“唤醒”
在主机和设备刚上电,或者需要复位时,它们的物理层电路可能还未同步,无法理解正常的8b/10b编码数据。此时,它们需要一种更简单、更鲁棒的"原始"通信方式来建立最初的连接。这就是OOB(Out-of-Band)信号的用武之地。
OOB信号被称为"带外",是因为它不依赖于正常的编码数据通道,而是通过一种特定时间长度的、极低频率的突发脉冲来传递信息。这些脉冲的速率(~几十MHz)远低于正常通信速率(GHz级别),接收端可以通过简单的模拟电路(如峰值检测器)来识别。
SATA定义了三种主要的OOB信号序列:
-
COMRESET:由主机发送给设备。这是一个复位信号,意思是"醒来,我们重新开始建立连接"。
-
COMINIT:由设备发送给主机。这是一个初始化信号,通常是设备对COMRESET的回应,或者设备主动发起的"你好,我在这里"的信号。
-
COMWAKE:由主机或设备发送。这是一个唤醒信号,用于从低功耗状态(Partial/Slumber)中唤醒对方。
OOB信号的物理表现:
每个OOB序列都由一系列重复的"突发脉冲"构成。一个"突发"时期是持续一段时间的差分电压,然后是一个更长时间的电气空闲期。
-
COMRESET: 最长,典型为 160-320 us 的突发,后跟 480-960 us 的空闲。
-
COMINIT: 与COMRESET类似。
-
COMWAKE: 较短,典型为 80-160 us 的突发,后跟 160-320 us 的空闲。
接收端通过测量突发的持续时间来区分这三种信号。
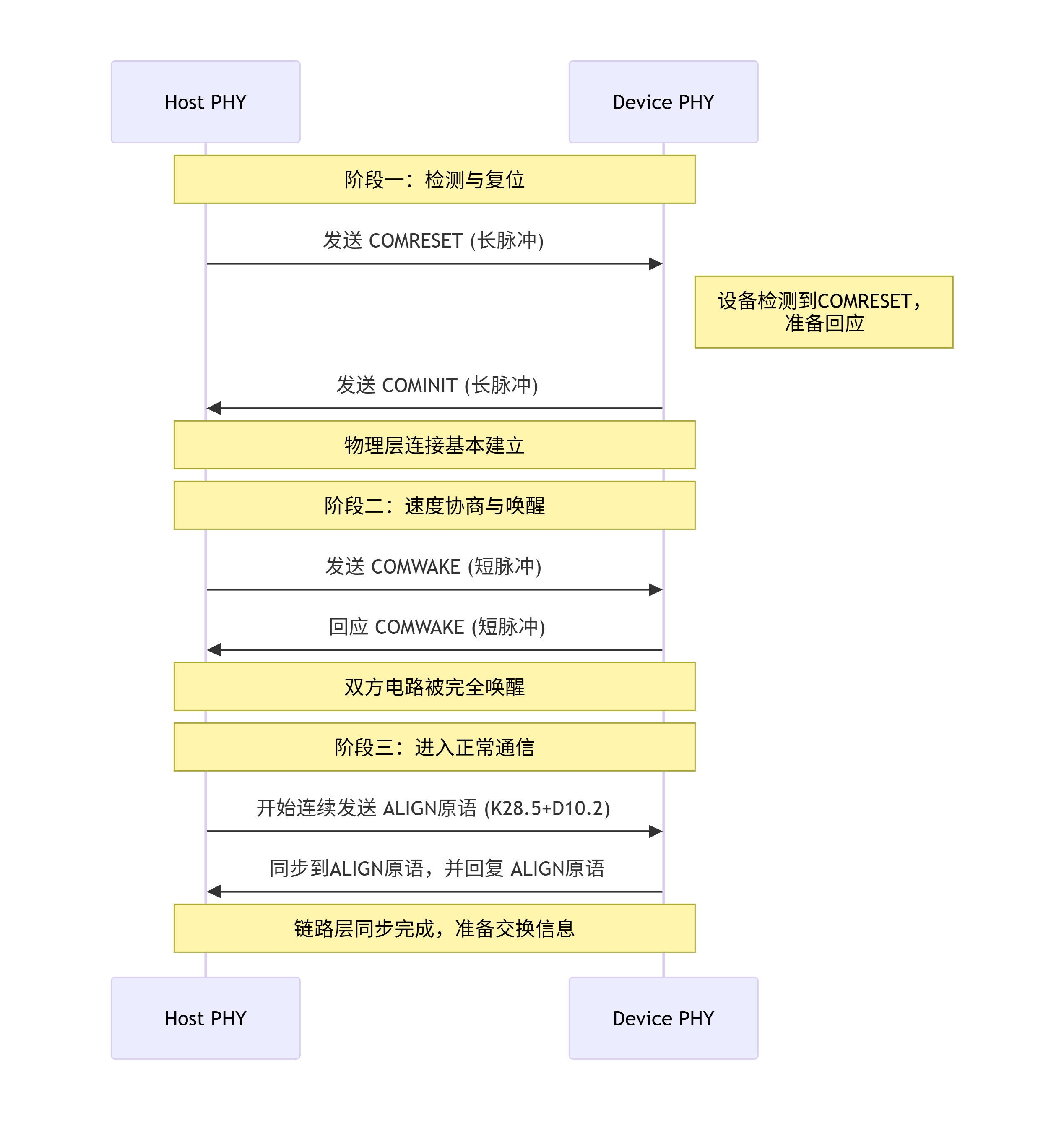
4.2.1 链路初始化流程
一个典型的SATA链路初始化(例如上电或热插拔)过程,就是通过OOB信号的"对话"来完成的。
比方:我们可以把OOB信号比作早期人类在远距离通信时使用的烽火或鼓声。
-
COMRESET 就像点燃一座巨大的烽火台,浓烟滚滚,意思是"全军注意!准备行动!"
-
COMINIT 就像远处的另一座烽火台也点燃作为回应,意思是"收到指令,已准备就绪!"
-
COMWAKE 则像是节奏更快的战鼓声,意思是"各就各位,战斗即将开始!"
-
随后,双方开始使用复杂的语言(8b/10b编码的原语和数据)进行详细的战术交流。
这种简单而鲁棒的OOB机制,确保了SATA链路能够在各种未知状态下可靠地启动。
4.3 速度协商机制
在OOB序列之后、正常通信开始之前,主机和设备会进行速度协商。SATA设备支持一个或多个速度等级(1.5G, 3G, 6G)。协商过程通常如下:
-
主机在发送完
COMWAKE后,会以其支持的最高速率开始发送ALIGN原语。 -
设备尝试在这个速率下同步。如果同步失败(例如,设备不支持该速率),它会保持沉默或不正确响应。
-
主机检测到失败后,会触发新的OOB序列(
COMRESET/COMINIT),然后以低一档的速率重试,直到找到一个双方都支持的速率。 -
协商成功后,链路将固定在该速率下工作。
本章小结
本章我们揭开了SATA物理层最后两个核心技术的面纱:
-
8b/10b编码 如同一位精通的密码员,它将原始的8位数据"翻译"成一种自带节奏、长期平衡的10位码型,巧妙地解决了时钟恢复和直流平衡的难题,尽管付出了一定的带宽代价。
-
OOB信号 则如同通信双方在正式会谈前约定的一套简单可靠的"肢体语言"或"信号弹",通过长短不同的脉冲序列,在混乱中建立起最初的秩序,完成了链路的检测、复位、唤醒和速度协商。
至此,我们已经完整地了解了SATA的物理层如何将比特流变成可靠的电气信号。从下一章开始,我们将进入链路层的世界。在那里,这些被编码的比特流将被组织成有结构的"帧",并在一套严密的规则下开始流动。我们将遇到SATA协议中最重要的概念之一——原语(Primitive)。
第三部分:链路层(Link Layer)核心机制
第5章:原语(Primitive) - 链路层的通用语言
在物理层为我们建立了稳定的比特流传输通道之后,链路层需要在这些比特流之上建立起一套有序的对话规则。想象一下,如果两个人只是互相大声喊出想说的内容,没有"你好"、"请开始"、"我没听清"这样的协调用语,沟通将变得混乱低效。在SATA的链路层,原语(Primitive) 就扮演着这些关键协调用语的角色。
原语是SATA链路层最基本的通信单位,它们是特殊的、预定义的双字(DWORD,即4个字节) 序列。由于其特殊的8b/10b编码(通常以K字符开头),接收端可以轻松地将它们与普通的数据负载区分开来。原语不携带用户数据,而是用于控制链路状态、管理流量、界定帧的边界以及传递简单的命令。
5.1 什么是原语?控制字符与功能
一个原语就是一个32位(4字节)的码型。在物理层,它被当作4个独立的字节进行8b/10b编码和传输。但由于其第一个字符通常是K字符(控制字符),接收端的链路层可以瞬间识别出:"这是一个控制命令,而不是数据"。
原语的核心特征:
-
即时性:一旦接收端识别出一个原语,它会立即采取行动,而无需等待整个帧的接收。这使得原语能够实现实时控制,如流量控制。
-
简单性:每个原语都有单一、明确的功能。
-
连续性:在链路空闲或处于特定状态时,通信双方会持续交换特定的原语(如
ALIGN)以保持同步。
原语的类型:根据功能,原语大致可分为以下几类:
-
流控与握手类:
X_RDY,R_RDY,R_IP,R_OK -
帧定界类:
SOF,EOF -
状态管理与同步类:
SYNC,ALIGN -
电源管理类:
PMREQ_P,PMREQ_S,PMAK
5.2 关键原语详解
让我们来认识几位在SATA通信中扮演关键角色的"主角"。
5.2.1 ALIGN - 对齐与时钟补偿的基石
-
构成:
ALIGN原语由两个特定的DWORD组成:第一个是K28.5 D10.2,第二个是K28.5 D10.2(在SATA 1.0/2.0中)或者是K28.5 D25.4(在SATA 3.0中,称为ALIGNp)。K28.5是一个具有独特比特模式(0011111xxx)的K字符,极易被识别。 -
功能:
-
链路同步:在OOB初始化完成后,通信双方会持续发送
ALIGN原语。这宣告链路已准备好,并保持同步。 -
时钟补偿:接收端和发送端的时钟频率存在微小差异。
ALIGN原语作为"填充物",可以在需要时被插入或删除,从而补偿这种时钟漂移,防止缓冲区上溢或下溢。 -
空闲状态填充:当没有数据帧需要传输时,链路就处于持续交换
ALIGN原语的状态。
-
-
比方:
ALIGN就像两国元首热线电话接通后,双方接线员不断重复的"线路正常,请保持"的测试音。它确保线路是通的,并且通过持续的声音来校准彼此的听筒。
5.2.2 SOF, EOF, EOFdt - 帧的开始与结束
这些原语用于标记一个数据帧的边界,如同信封的封口和邮戳。
-
SOF (Start of Frame):
-
构成:
K27.7 D10.2 D10.2 D10.2 -
功能:它宣告一个帧的开始。接收端一看到
SOF,就知道接下来的数据属于一个新的帧,并开始组装帧的内容。
-
-
EOF (End of Frame):
-
构成:
K29.7 D10.2 D10.2 D10.2 -
功能:它标记一个帧的正常结束。接收端看到
EOF,就知道一个完整的帧已经接收完毕,可以将其传递给传输层处理。
-
-
EOFdt (End of Frame - Deferred):
-
构成:
K30.7 D10.2 D10.2 D10.2 -
功能:这是一种特殊情况的结束标记,主要用于原生指令队列(NCQ) 的上下文中。它表示当前数据帧的结束,但链路并不立即回到空闲状态,而是期待紧接着下一个与NCQ相关的帧。
-
5.2.3 X_RDY, R_RDY, R_IP - 流量控制的交响乐
这是SATA链路层实现流量控制的核心机制,防止发送方的数据"淹没"尚未准备好的接收方。
-
X_RDY (Transmitter Ready):
-
功能:由发送方(无论是主机还是设备)发出。它的意思是:"我这边有一个数据帧已经准备好要发送给你了,你准备好了吗?"
-
-
R_RDY (Receiver Ready):
-
功能:由接收方发出,作为对
X_RDY的积极响应。它的意思是:"我听到了,我的缓冲区有空位,你可以开始发送帧了。"
-
-
R_IP (Receiver In Progress):
-
功能:由接收方在以下情况下发出:
-
当它收到了
X_RDY,但正在处理上一个帧,暂时无法接收新帧。 -
或者,它正在处理当前帧,但尚未完成。
-
-
它的意思是:"我知道你准备好了,但我这边还在忙,请稍等一下。" 这阻止了发送方在超时后不必要的重传。
-
流量控制对话示例:
5.2.4 SYNC - 同步与错误恢复的急救员
-
功能:
SYNC原语是链路层的"紧急重启"按钮。当接收端检测到无法通过常规纠错机制恢复的错误时(例如,CRC连续错误、原语序列混乱),它会开始发送SYNC原语。 -
流程:
-
一方开始连续发送
SYNC。 -
另一方检测到
SYNC后,也会停止当前所有操作,开始回复SYNC。 -
双方在交换一定数量的
SYNC原语后,会退回到发送ALIGN原语的状态,重新同步链路,然后尝试恢复通信。
-
-
比方:这就像两人在通话中受到强烈干扰,完全听不清对方在说什么。此时,一方大喊"重复!重复!",另一方听到后也回应"重复!重复!"。然后双方停止混乱的对话,重新从"你好,能听到吗?"开始建立通信。
5.2.5 CONT - 保持电气空闲
-
功能:在SATA的部分低功耗状态(如Partial)下,物理层差分线会进入电气空闲状态以省电。
CONT原语用于在这种状态下周期性地"唤醒"链路,保持基本的同步,以便快速恢复到全功率状态。它就像是休眠中的设备发出的轻微"鼾声",证明它还活着,并且可以快速唤醒。
5.3 原语的发送与接收状态机
链路层的行为是由一个精确定义的状态机来控制的。这个状态机规定了在什么情况下应该发送什么原语,以及接收到某个原语后应该转移到什么状态。理解这个状态机是理解链路层工作的关键。
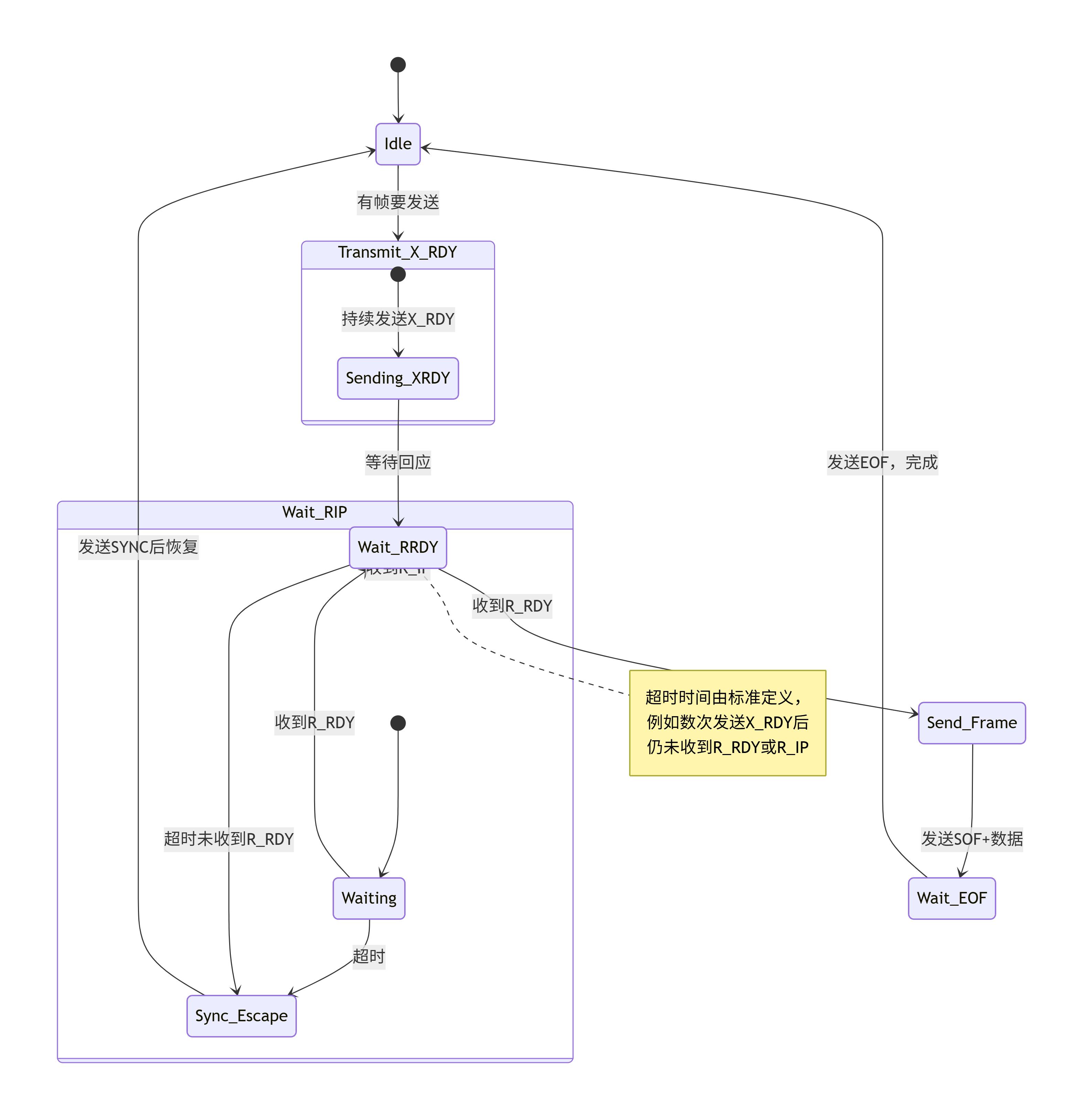
以下是一个高度简化的主机发送帧的状态机示意图,它展示了X_RDY, R_RDY, SYNC等原语是如何驱动状态转移的:
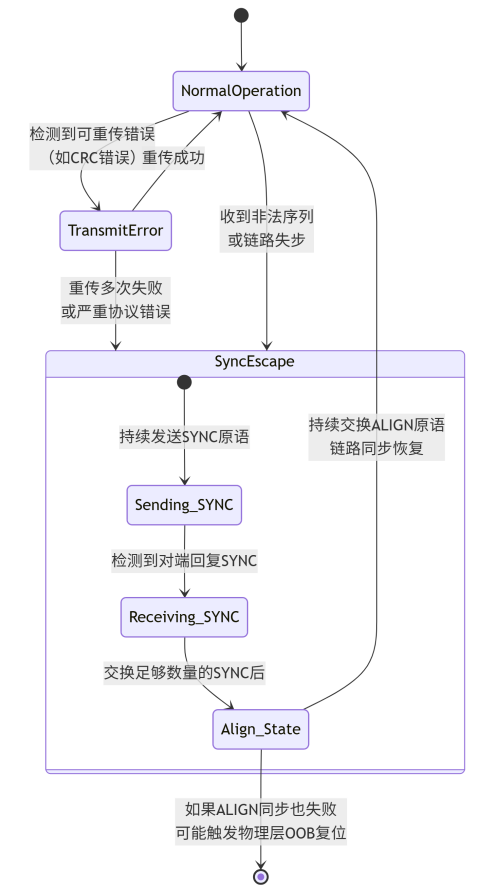
状态机解读:
-
Idle (空闲):链路初始状态,持续交换
ALIGN原语。 -
Transmit_X_RDY (发送准备):当上层有数据要发送时,进入此状态,持续发送
X_RDY原语,并等待接收方的回应。 -
Wait_RRDY (等待就绪):停止发送
X_RDY,专心等待R_RDY。 -
Wait_RIP (等待处理中):如果收到
R_IP,则进入此状态等待,直到收到R_RDY。 -
Send_Frame (发送帧):收到
R_RDY后,立即开始发送帧内容(SOF-> 数据 ->CRC->EOF)。 -
Sync_Escape (同步逃离):如果在等待
R_RDY或R_IP时超时,或者通信过程中发生严重错误,则跳转到此状态。在此状态下,发送方会连续发送SYNC原语,尝试与接收方重新同步链路,然后回到Idle状态。
这个状态机确保了即使在有错误发生的情况下,链路也能通过预定义的规则恢复到稳定状态,体现了SATA协议的鲁棒性。
本章小结
本章我们深入探讨了SATA链路层的"通用语言"——原语。我们认识到:
-
原语是用于控制和协调的特殊双字,是链路层一切活动的基础。
-
我们详细解析了
ALIGN(同步与补偿)、SOF/EOF(帧定界)、X_RDY/R_RDY/R_IP(流量控制)和SYNC(错误恢复)等关键原语的功能与作用。 -
最后,我们通过一个状态机模型,看到了这些原语是如何在动态的通信过程中相互协作,有条不紊地管理着数据流的。
原语为数据帧的传输铺设了规则的轨道。在下一章中,我们将把目光投向这些轨道上运行的"列车"——帧(Frame)。我们将详细拆解它的结构,了解数据和控制信息是如何被精心打包,并通过我们本章介绍的这套原语系统进行传输的。
第6章:帧结构(Frame)与CRC校验
在上一章中,我们学习了链路层的"控制语言"——原语。现在,我们将关注这些控制指令所管理的核心载体:帧(Frame)。如果说原语是交通指挥中的红绿灯和手势,那么帧就是在道路上行驶的、装载着实际货物的标准集装箱卡车。
帧是SATA链路层数据传输的基本单位,它负责将上层(传输层)的信息(FIS)可靠地、完整地从一个端口传递到另一个端口。本章将深入剖析帧的详细结构,并解释其如何通过CRC校验来确保数据的完整性。
6.1 SATA帧的完整结构
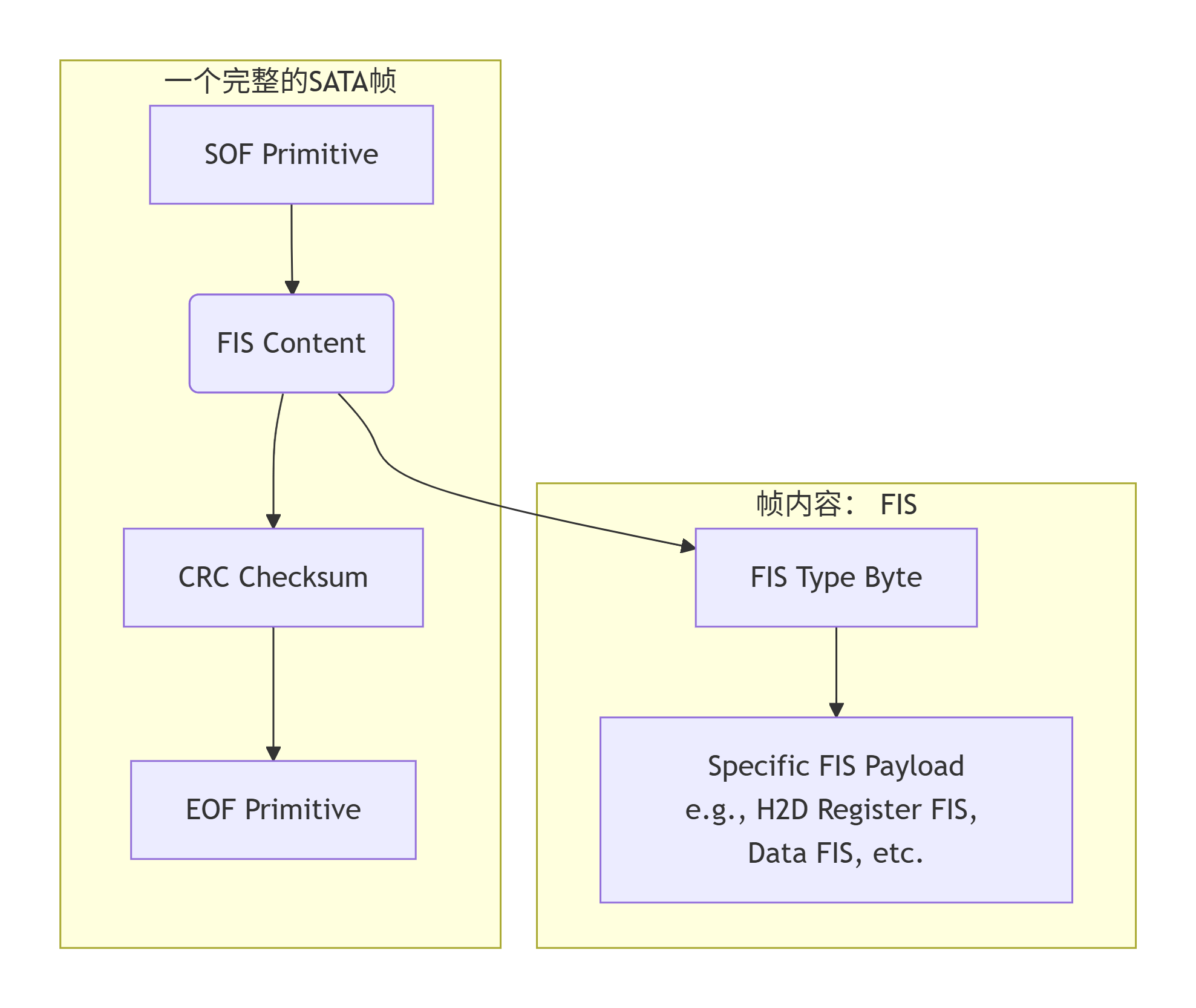
一个完整的SATA帧就像一列编排有序的火车,由车头、货物车厢、安全锁和车尾组成。它的结构是固定且标准化的,确保了通信双方能够无误地解析。
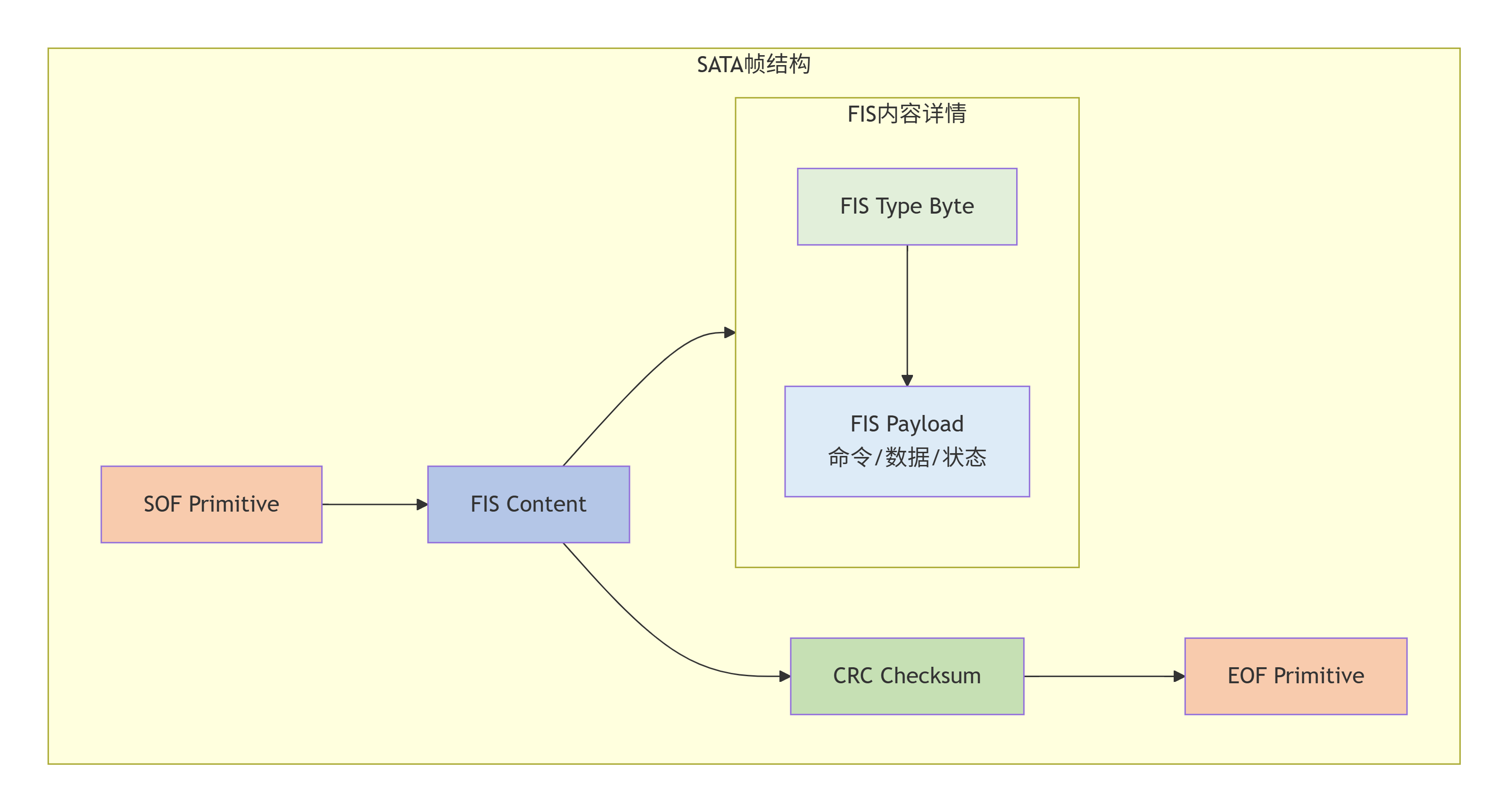
帧的组成部分(按传输顺序):
-
SOF (Start of Frame) Primitive:
-
作用:帧的起始标志。接收端一旦检测到
SOF,就知道一个新的帧传输已经开始,并开始接收和组装帧内容。 -
比方:火车的车头,标志着整列火车的开始。
-
-
FIS Content (帧内容):
-
这是帧的核心载荷,承载着实际要传递的控制信息或用户数据。它来自传输层,被称为FIS (Frame Information Structure)。
-
FIS本身也有一个复杂的结构,我们将在第8章详细解析。在这里,你可以将其理解为一封装在帧里的标准化信件。
-
长度:FIS的长度是可变的,取决于FIS的类型。一个数据帧的FIS可以包含0到8192字节的数据载荷。
-
比方:火车的货物车厢,里面装着实际的货物(数据)和货运单(控制信息)。
-
-
CRC (Cyclic Redundancy Check) Checksum:
-
作用:循环冗余校验码。它是一个32位(4字节)的数值,由发送端根据
SOF之后、CRC之前的全部数据(即整个FIS内容)计算得出。 -
接收端会使用相同的算法对收到的FIS内容重新计算CRC,并与帧中传递过来的CRC值进行比较。
-
结果:
-
匹配:数据在传输过程中没有出错。
-
不匹配:数据在传输过程中发生了错误,接收端会丢弃该帧,并通过后续机制要求发送端重传。
-
-
比方:挂在火车尾部的安全封条。发货方根据货物清单计算出一个封条号码,收货方收到后重新计算号码。如果号码对不上,说明货物在运输途中可能被篡改或损坏,需要拒收并要求重发。
-
-
EOF (End of Frame) Primitive:
-
作用:帧的结束标志。接收端检测到
EOF,就知道一个完整的帧已经接收完毕,可以开始处理其中的FIS内容,并验证CRC。 -
比方:火车的车尾,标志着整列火车的结束。
-
6.2 帧头(FIS)类型预览
虽然FIS的详细解析属于传输层,但为了更全面地理解帧的结构,我们在此提前预览一下主要的FIS类型。FIS类型决定了"货物车厢"里装的是什么性质的"货物",以及应该如何处理它。
-
寄存器 - 主机到设备 FIS (H2D FIS):最常见的FIS类型。用于主机向设备发送命令(如读、写、识别等)。它包含了ATA命令寄存器(Command, Feature, LBA, Sector Count等)的镜像。
-
寄存器 - 设备到主机 FIS (D2H FIS):设备对主机命令的回应。它包含了设备的状态寄存器(Status)和错误寄存器(Error),用于报告命令执行成功与否。
-
数据 FIS:用于在主机和设备之间传输实际的用户数据块。在DMA或PIO数据传输过程中使用。
-
DMA 激活 FIS:由设备发送给主机,用于在DMA传输中初始化数据传送。
-
PIO Setup FIS:由设备发送给主机,用于为PIO模式的数据输入做准备。
一个帧与FIS的关系:
6.3 CRC循环冗余校验:如何确保数据完整性?
CRC是确保数据在高速传输中完整性的关键技术。它是一种根据数据流计算出的、短小精悍的"数字指纹"。
6.3.1 CRC的工作原理
-
发送端计算:
-
发送端将
SOF之后、CRC之前的所有数据(即整个FIS内容)视为一个很长的二进制数。 -
将这个二进制数除以一个预先定义好的生成多项式。
-
除法得到的余数就是CRC校验和。这个余数被填入帧的CRC字段中。
-
SATA使用的生成多项式是:x³² + x²⁶ + x²³ + x²² + x¹⁶ + x¹² + x¹¹ + x¹⁰ + x⁸ + x⁷ + x⁵ + x⁴ + x² + x + 1
-
-
接收端验证:
-
接收端同样将收到的FIS内容除以同一个生成多项式。
-
它将计算得到的余数与帧中传输过来的CRC值进行比较。
-
如果两者一致,则认为数据正确无误。如果不一致,则判定传输中发生了错误。
-
6.3.2 为什么CRC如此有效?
CRC算法被设计为对以下几种错误具有极高的检测率:
-
突发性错误:数据流中连续多位发生错误。SATA的32位CRC可以检测出所有长度小于等于32位的突发错误。
-
随机性错误:数据流中随机分布的单个或多个比特错误。
它的检错能力远高于简单的奇偶校验。理论上,SATA使用的CRC-32能够检测出99.999999977% 的错误比特模式。这意味着在100亿个出错的帧中,平均只有不到3个错误帧能够逃过CRC的法眼。
6.3.3 实例说明
假设我们要传输一个非常简单的FIS内容,其数据(用16进制表示)为:0x12345678。
-
发送端:
-
将
0x12345678作为被除数。 -
用它除以SATA的标准生成多项式(一个巨大的二进制数)。
-
假设计算得到的余数(CRC)是
0xABCD1234。 -
发送端组帧:
SOF+0x12345678+0xABCD1234+EOF。
-
-
接收端:
-
收到帧后,提取出FIS内容
0x12345678。 -
用同样的多项式计算CRC,得到
0xABCD1234。 -
从帧中提取出发送方的CRC值
0xABCD1234。 -
两者匹配,数据有效。
-
-
假设传输中发生错误:
-
假设FIS内容在传输中因干扰变成了
0x12345679(最低位翻转)。 -
接收端计算
0x12345679的CRC,得到的结果可能是0xEF567890。 -
与收到的CRC
0xABCD1234比较,发现不匹配。 -
数据无效,接收端丢弃该帧。随后,接收端不会发送
R_OK,导致发送端超时并重传该帧。
-
本章小结
本章我们完成了对SATA链路层核心数据单元——帧的深度剖析。我们了解到:
-
帧是一个结构严谨的数据包,由
SOF、FIS内容、CRC和EOF四部分组成。 -
FIS是帧的有效载荷,承载着具体的命令、状态或数据,其类型决定了通信的语义。
-
CRC校验是保障数据完整性的基石,它通过一个强大的数学算法为数据生成"指纹",能够以极高的概率检测出传输过程中引入的任何错误。
至此,我们已经清晰地看到了数据从传输层交付给链路层后,是如何被打包成帧,并通过原语系统进行可靠传输的。在下一章中,我们将把这些知识点串联起来,系统性地探讨链路层的流量控制与错误恢复机制,完整呈现一场有序、可靠的SATA数据对话是如何进行的。
第7章:流量控制与错误恢复
在前两章中,我们分别学习了链路层的"控制语言"(原语)和"数据载体"(帧)。现在,我们将把这些元素整合起来,深入探讨SATA链路层如何通过精密的协作机制,确保数据在高速传输中既不会"淹没"接收方,又能在出现错误时自动恢复。这正是流量控制和错误恢复机制的核心价值。
7.1 基于原语的流控:X_RDY/R_RDY握手
SATA的流量控制机制优雅而高效,它完全通过原语的交换来实现,无需复杂的计数器或窗口协议。这套机制的核心目标是:确保发送方只在接收方明确准备好的情况下才发送数据帧,从而防止接收端缓冲区溢出。
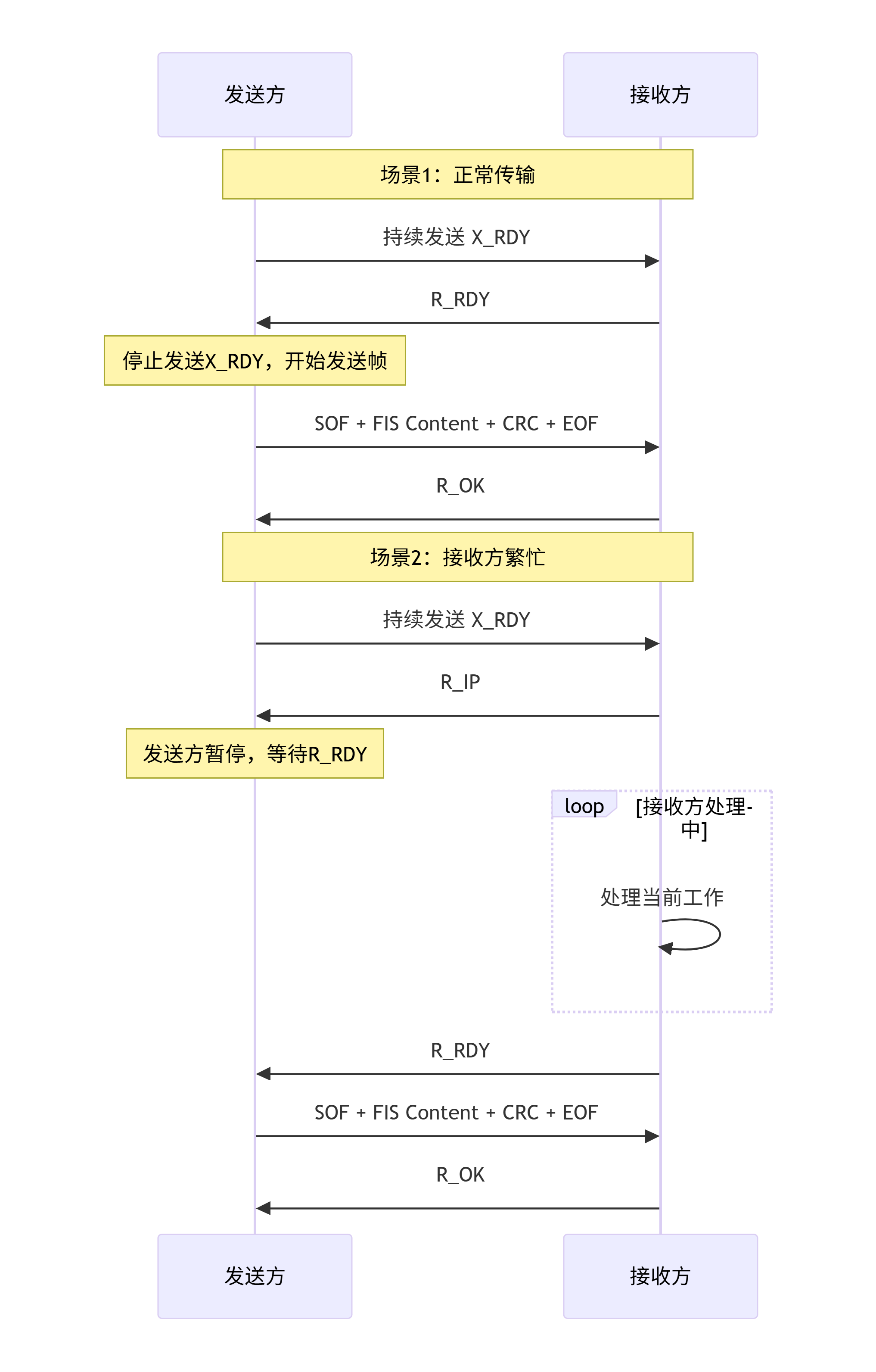
7.1.1 正常的流控对话
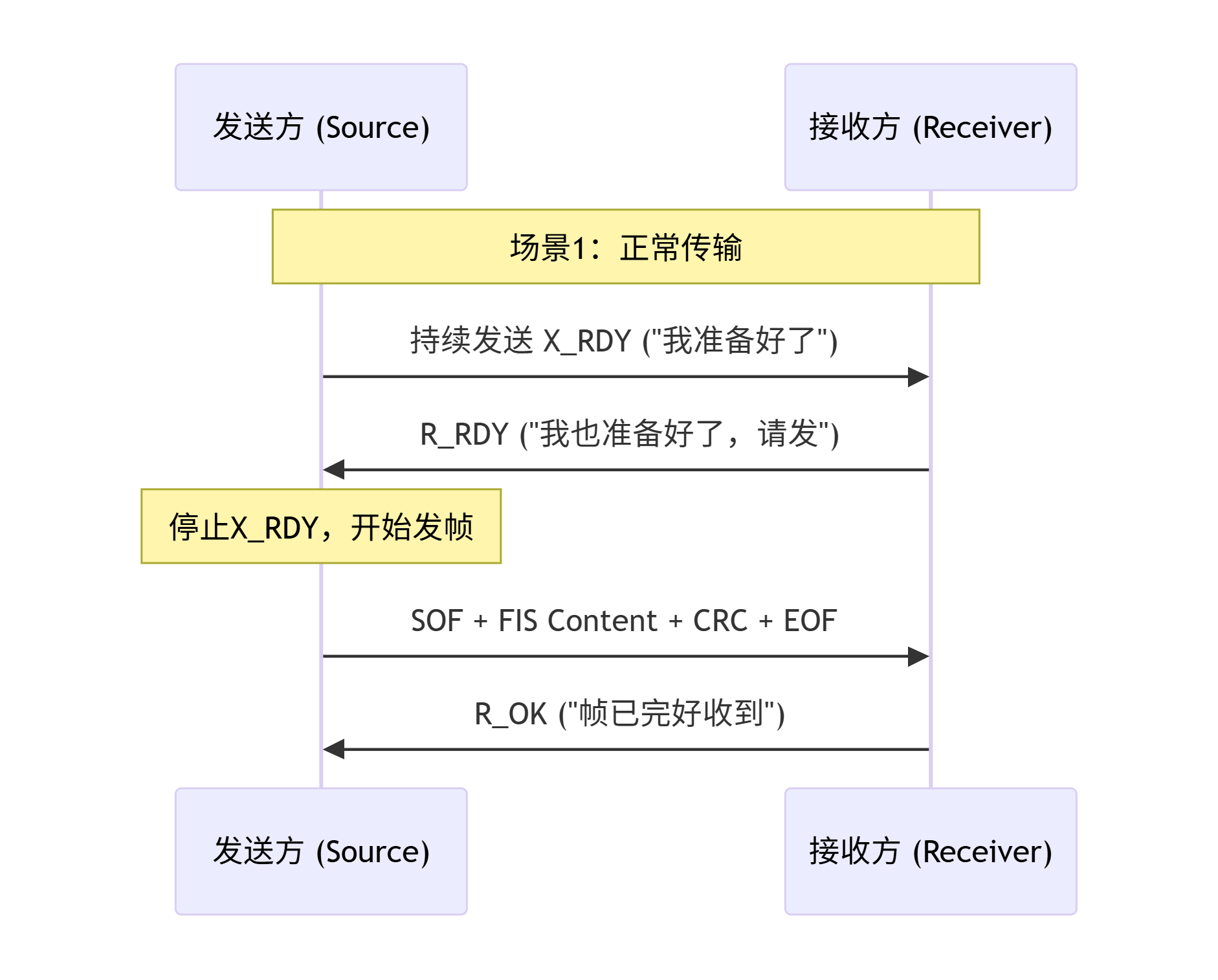
让我们重温并细化这个关键流程:
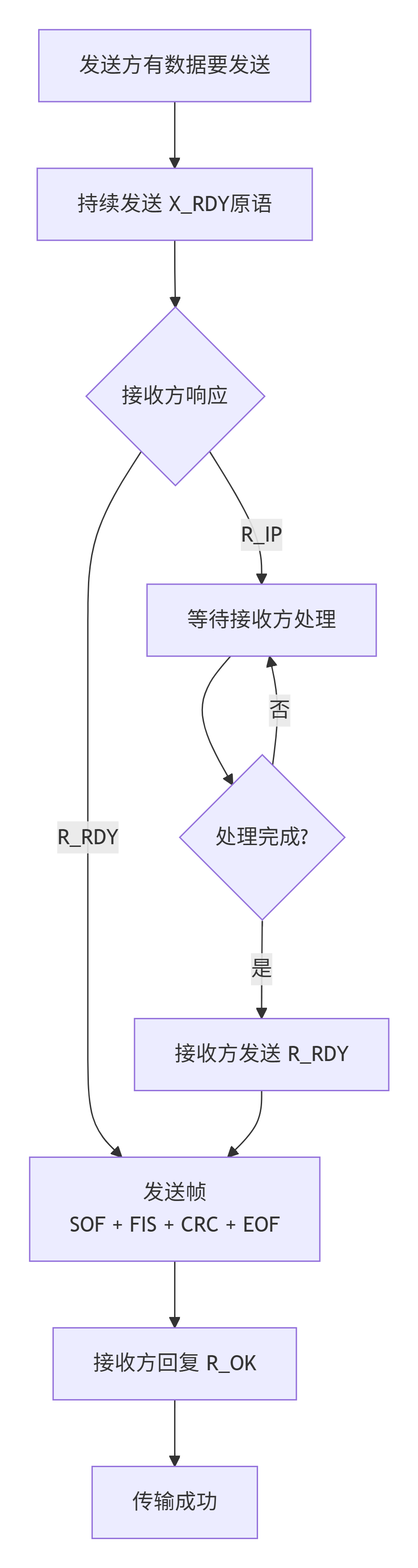
-
发送方就绪:当发送方(主机或设备)有数据帧需要传送时,它开始持续发送
X_RDY原语。这如同举起一面旗子,上面写着"我有货物要发送,请求通行"。 -
接收方响应:接收方如果其内部缓冲区有空间接收新的帧,则会响应
R_RDY原语。这好比放下栏杆,发出"准许通行"的信号。 -
帧传输:发送方一收到
R_RDY,立即停止发送X_RDY,并开始发送完整的帧(SOF-> FIS内容 ->CRC->EOF)。 -
传输确认:接收方成功接收并校验整个帧后(CRC正确),会根据FIS类型回复确认原语。对于控制帧(如Register FIS),通常回复
R_OK;对于数据帧,流程可能更复杂一些。
7.1.2 接收方繁忙的处理
当接收方暂时无法处理新帧时(例如,正在处理前一个帧,或DMA引擎正在将数据写入内存),R_IP原语就登场了。
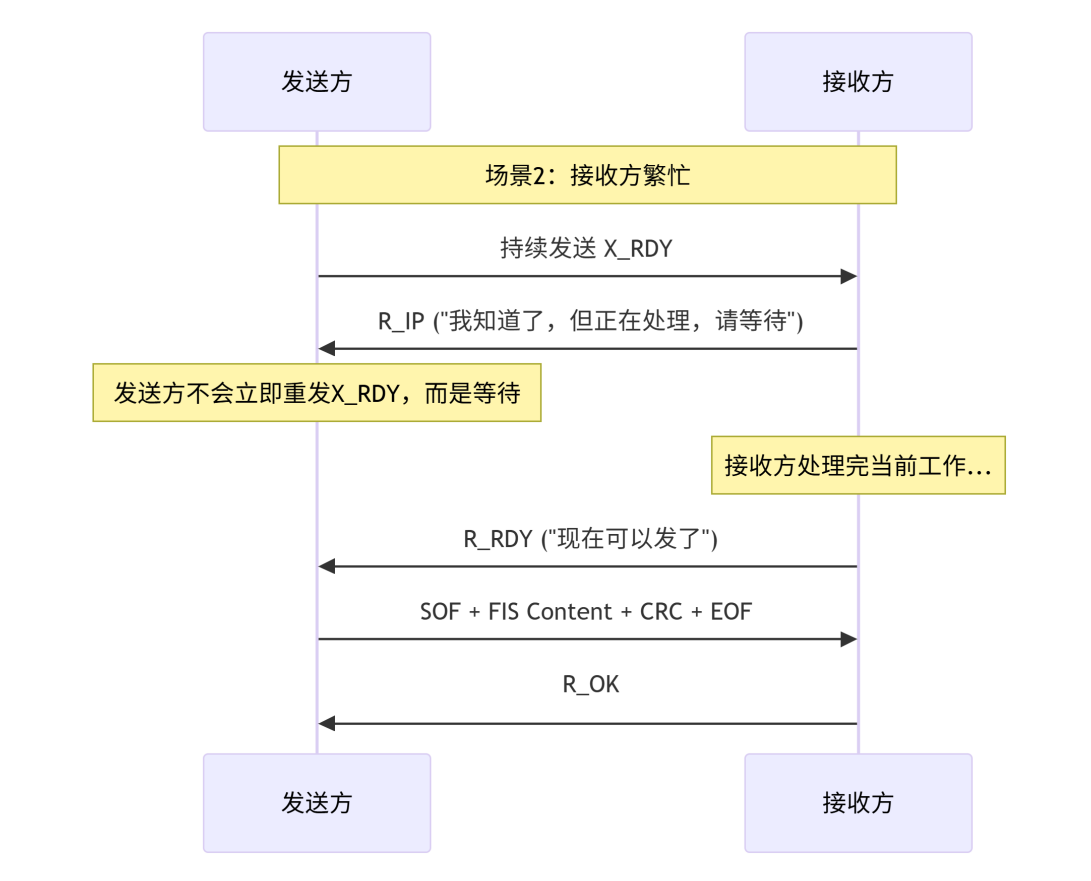
R_IP的作用是阻止发送方在超时后盲目地发起重传。它明确地告诉发送方:"我活着,也看到你的请求了,只是现在忙,请耐心等待我的R_RDY。" 这避免了不必要的链路带宽浪费和潜在的重传冲突。
7.2 链路错误检测
在高速传输中,错误不可避免。SATA链路层具备多重错误检测能力:
-
CRC错误:这是最主要、最有效的错误检测机制。如第6章所述,接收端对帧的FIS内容重新计算CRC,并与帧尾的CRC字段比较。任何不匹配都意味着数据在物理传输过程中发生了比特错误。
-
原语错误:
-
无效原语:接收到的DWORD无法被识别为任何已知的原语或有效的8b/10b字符。
-
非法原语序列:在特定的链路状态下,收到了不该出现的原语。例如,在非NCQ传输中收到
EOFdt,或者在等待R_RDY时收到了SYNC。
-
-
协议违反:例如,帧长度不符合该类型FIS的规定,或者在帧中间出现了原语(原语只允许在帧之间出现)。
7.3 错误恢复机制:重传与链路重新初始化
当错误被检测到时,SATA链路层不会坐视不管。它拥有一套分层级的恢复机制,从简单的帧重传到彻底的链路重建。
7.3.1 帧重传
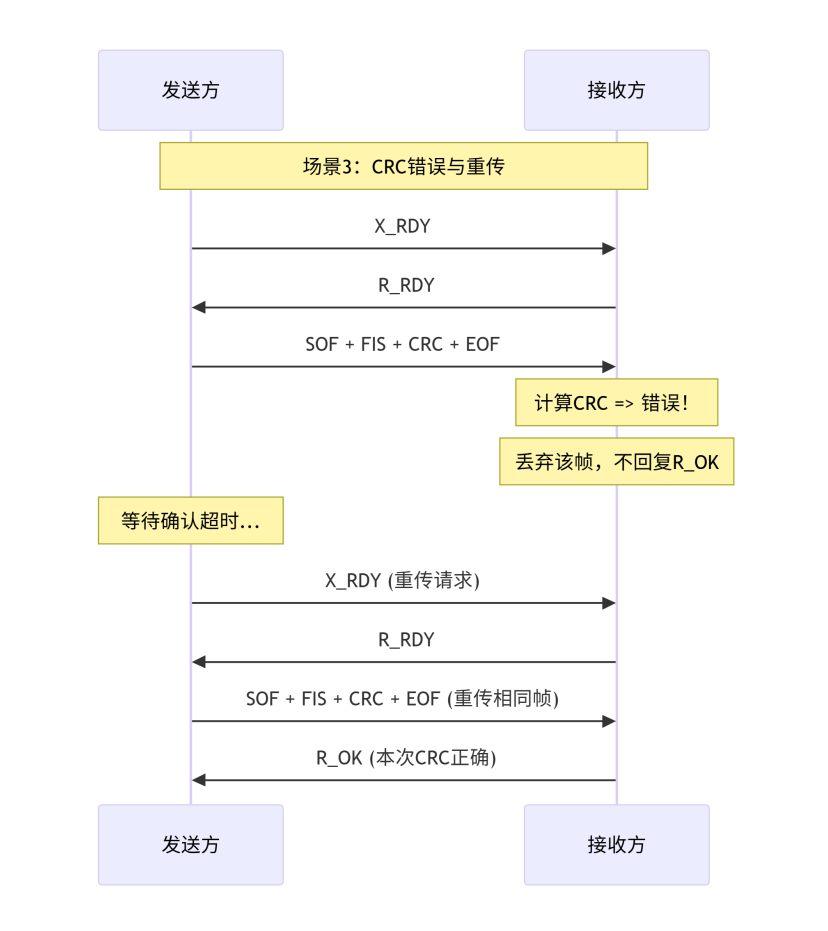
这是最常见、最轻量级的错误恢复方式,主要用于应对临时的、孤立的错误(如偶发的CRC错误)。
-
触发条件:
-
发送方在发出帧后,在预期时间内没有收到任何确认(
R_OK或用于数据帧的R_RDY)。 -
接收方检测到CRC错误,因此不回复
R_OK。
-
-
恢复过程:
-
发送方等待确认超时。
-
发送方重新回到流程的起点:开始持续发送
X_RDY原语。 -
如果接收方已经准备好(可能之前的错误是瞬时性的),它会回应
R_RDY。 -
发送方重传完全相同的帧。
-
如果重传成功,通信继续;如果连续重传多次失败,则升级到更严格的恢复措施。
-
7.3.2 链路重新初始化:SYNC Escape序列
当错误非常严重,例如连续重传失败、物理层失步、或出现无法理解的混乱状态时,就需要动用"终极武器"——链路重新初始化。这个过程的核心是SYNC原语。
-
触发条件:
-
连续多次帧重传失败。
-
接收到无效的原语序列。
-
物理层报告严重问题。
-
-
恢复过程 - SYNC Escape:
-
检测到严重错误的一方(可以是主机或设备)开始持续发送
SYNC原语。 -
另一方接收到
SYNC后,意识到链路出现了严重问题,也会停止所有当前活动,并开始回复SYNC原语。 -
双方在交换了预定数量的
SYNC原语后(这提供了一个"冷静期",并确保双方都已同步进入恢复状态),会退回到发送ALIGN原语的状态。 -
此时,链路相当于进行了一次"软重启"。它保持在当前协商的速度上,但所有之前的传输状态都被清除。
-
双方从交换
ALIGN原语开始,重新同步,然后准备进行新的通信。如果问题依然存在,可能会触发更底层的OOB序列来重新协商物理层参数。
-
7.3.3 错误恢复的比喻
我们可以将整个错误恢复机制比作一个专业的物流团队:
-
帧重传:就像快递员第一次送货时发现收件人不在家(CRC错误),他留下了"通知卡"(不回复
R_OK)。然后他按照流程,第二天再次尝试投递(重传)同一个包裹。 -
R_IP流控:就像快递员打电话确认时,收件人说"我正在下楼,请等一分钟"(R_IP)。快递员就原地等待,而不是直接离开并计划第二天再投。 -
SYNC Escape:就像快递员和仓库之间的对讲机系统受到了强烈干扰,完全无法沟通。于是双方约定,同时按下"重置"按钮(发送
SYNC),然后重新从"测试,1-2-3,听到请回答"(交换ALIGN)开始建立连接。
7.4 综合实例:一个写操作中的完整流控与错误恢复
假设主机要向设备写入一个数据块。
-
主机发送
H2D Register FIS(WRITE DMA命令),通过X_RDY/R_RDY握手成功发送,设备回复R_OK。 -
主机准备数据,然后开始发送一个或多个
Data FIS。 -
在传输第二个
Data FIS时,发生CRC错误。 -
设备检测到CRC错误,丢弃该帧,且不回复任何原语。
-
主机等待确认超时,触发重传机制。它重新发送
X_RDY。 -
设备此时已准备好,回复
R_RDY。 -
主机重传第二个
Data FIS,此次成功,设备回复R_OK。 -
主机继续发送剩余的
Data FIS。 -
所有数据发送完毕后,设备发送
D2H Register FIS(状态:成功完成)。
这个例子展示了错误恢复机制对上层(传输层)是透明的。传输层只知道它请求发送一个数据块,而链路层在底层自动处理了中途发生的错误和重传,最终确保了整个操作的成功。
本章小结
本章我们将链路层的原语和帧知识融会贯通,系统性地阐述了SATA如何保障通信的可靠性与鲁棒性:
-
流量控制通过
X_RDY、R_RDY和R_IP的精确对话,实现了发送与接收的节奏同步,是防止数据丢失的第一道防线。 -
错误检测依赖于强大的CRC校验和原语序列检查,能够以极高的概率发现传输错误。
-
错误恢复机制具有层次性:帧重传处理常见的瞬时错误,而SYNC Escape则用于修复严重的链路状态故障,形成了从局部到整体的完备恢复体系。
至此,我们已经完整掌握了SATA链路层的工作原理。从下一章开始,我们将上升至传输层,去探究帧内部封装的FIS(帧信息结构) 的奥秘,看看具体的命令和数据是如何被组织和表达的。
第四部分:传输层与应用层(Transport/Application Layer)
第8章:帧信息结构(FIS)详解
在掌握了链路层如何可靠地传输帧之后,我们现在将目光投向帧内部承载的"货物"——FIS(Frame Information Structure,帧信息结构)。如果说帧是标准化的集装箱,那么FIS就是集装箱内按照严格规格打包的"货物清单"和"货物本身"。传输层的核心职责就是构建和解析这些FIS,从而将上层的抽象命令(如"读取LBA X的数据")转化为链路层可以传输的具体内容。
FIS是主机与设备之间交换命令、状态和数据的标准化数据结构。它决定了通信的语义,而链路层只关心通信的语法(如何开始、结束、校验)。
8.1 FIS:主机与设备间的“信封”
每一个FIS都有一个共同的特点:其第一个字节用来指明FIS的类型。接收端的传输层通过检查这个类型字节,就能知道应该如何解析后续的内容。
FIS的通用概念:
-
发送者:根据要执行的操作,构建特定类型的FIS,并将其传递给链路层进行发送。
-
接收者:从链路层收到一个帧后,提取FIS内容,查看类型字节,然后调用相应的解析逻辑来处理它。
-
内容:FIS内部包含了执行某个操作所需的全部信息,例如命令码、逻辑块地址、扇区数量、状态标志或实际的数据载荷。
8.2 寄存器 - 主机到设备 FIS (H2D FIS)
这是最重要、最常见的FIS类型之一。主机通过它向设备发送具体的ATA命令。
8.2.1 H2D FIS的结构
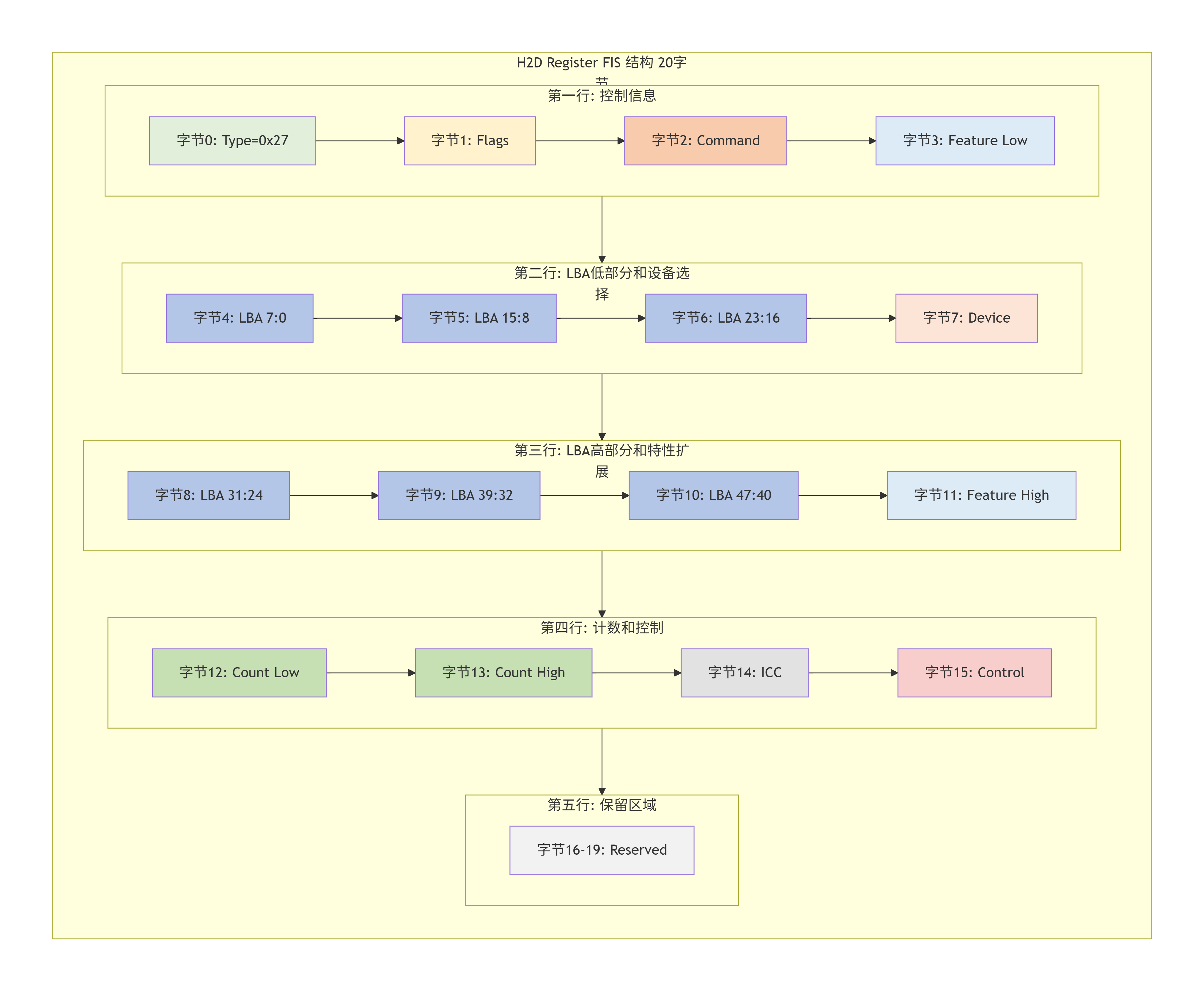
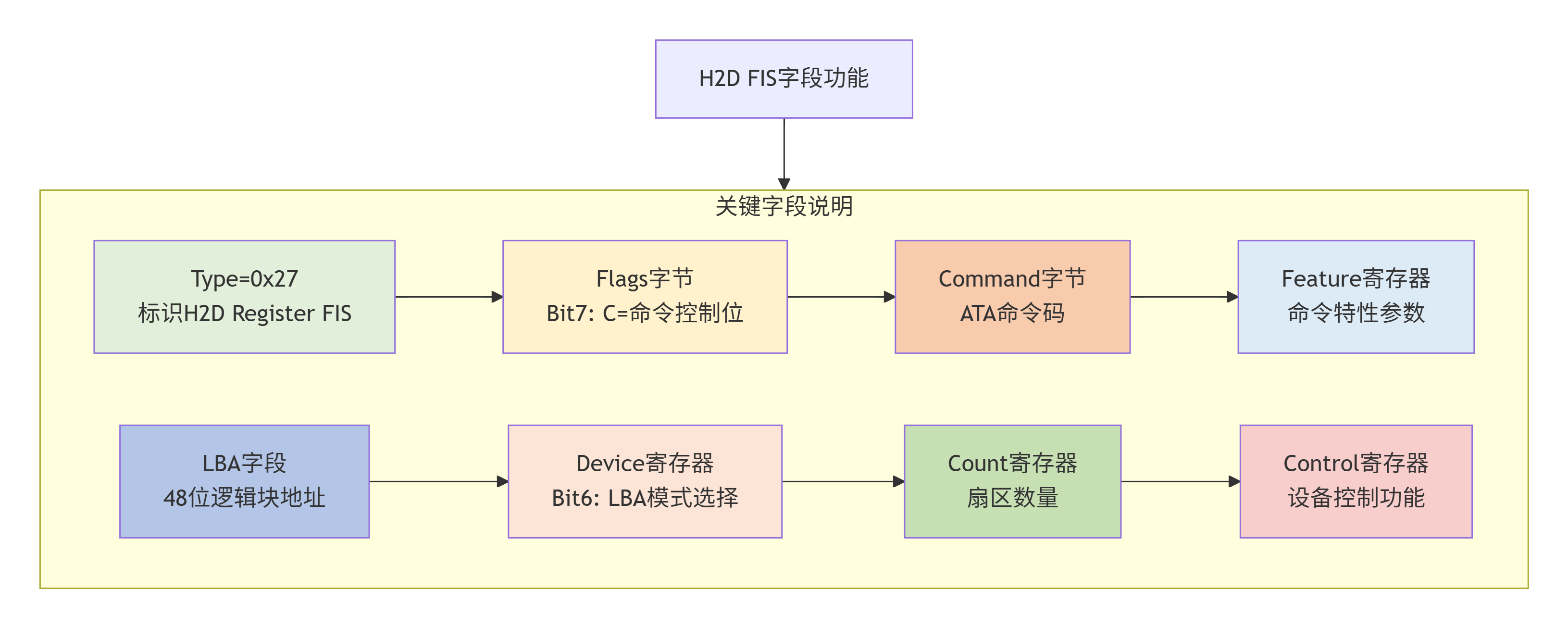
H2D FIS是一个固定长度的结构,通常为20字节(5个双字)。其详细的字节级结构如下:
字段详解:
-
Type (字节 0): 0x27,唯一标识这是一个H2D Register FIS。
-
Flag (字节 1):
-
Bit 7: C - 命令位。1表示本FIS传输的是一个命令;0表示这是一个控制信号(后续会讲到)。
-
其他位保留或用于特定控制。
-
-
Command (字节 2): 具体的ATA命令码。例如:
0xEC(IDENTIFY DEVICE),0x25(READ DMA EXT),0x35(WRITE DMA EXT)。 -
Feature (字节 3 & 11): 命令的特效或参数。常用于启用/禁用某些功能。
-
LBA (字节 4-9, 部分在字节 10): 逻辑块地址。用于指定读写操作的起始扇区。在48位LBA模式下,这7个字节共同构成了一个48位的扇区地址。
-
比方:LBA就像一本书的页码,精确指出了数据存储的位置。
-
-
Device (字节 6):
-
Bit 6: LBA Mode - 1表示使用LBA寻址,0表示使用旧的CHS寻址。
-
Bit 4: Device - 用于在选择主/从设备的传统架构中指定设备,在SATA中通常固定为0。
-
-
Count (字节 12-13): 要传输的扇区数量。在48位模式下,这是一个16位的值。
-
比方:Count就像在说"从第X页开始,连续读Y页"。
-
-
Control (字节 15): 特殊的控制寄存器,通常用于软件复位等操作。
8.2.2 实例:解析一个 READ DMA EXT 命令的H2D FIS
假设主机要读取从LBA 0x123456789ABC开始的16个扇区。
-
应用层:发出
READ DMA EXT命令,参数为LBA=0x123456789ABC, Count=16。 -
传输层:构建一个H2D FIS,填充各字段:
-
Type= 0x27 -
Flag= 0x80 (C=1,表示是命令) -
Command= 0x25 (READ DMA EXT) -
Feature= 0x00 -
LBA Low(字节4) = 0xBC (LBA的7:0位) -
LBA Mid(字节5) = 0x9A (LBA的15:8位) -
LBA High(字节6) = 0x78 (LBA的23:16位) -
Device= 0x40 (Bit 6=1, 启用LBA模式) -
LBA Low Extended(字节8) = 0x56 (LBA的31:24位) -
LBA Mid Extended(字节9) = 0x34 (LBA的39:32位) -
LBA High Extended(字节10) = 0x12 (LBA的47:40位) -
Count Low(字节12) = 0x10 (16个扇区) -
Count High(字节13) = 0x00 -
其余字段为0。
-
-
这个20字节的FIS被传递给链路层,封装进帧中发送给设备。
8.3 寄存器 - 设备到主机 FIS (D2H FIS)
这是设备对主机命令的响应。它告诉主机之前发送的命令执行结果是成功还是失败。
8.3.1 D2H FIS的结构
D2H FIS同样为20字节,结构与H2D FIS类似,但字段含义不同。
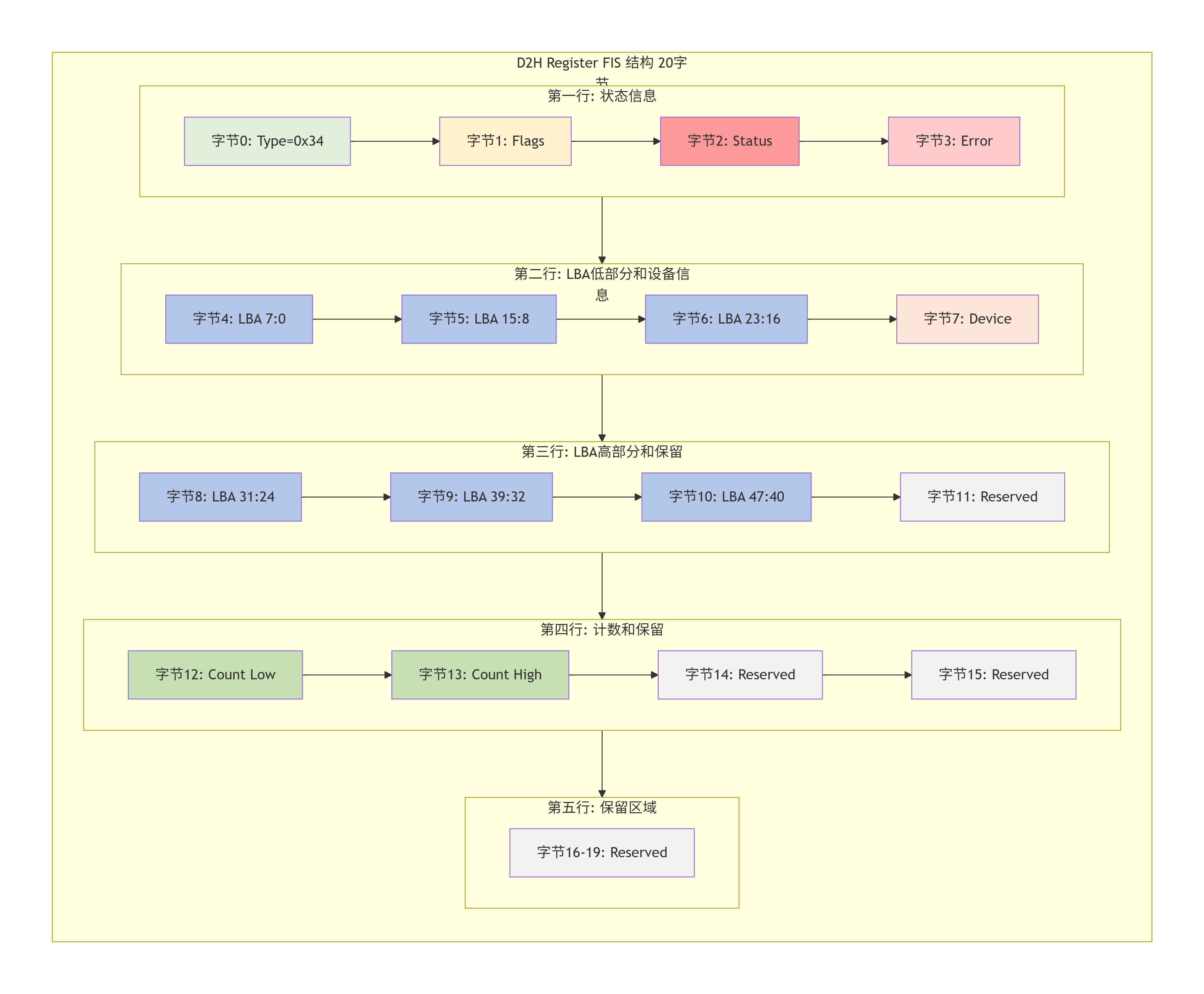
关键字段详解:
-
Type (字节 0): 0x34,唯一标识这是一个D2H Register FIS。
-
Flag (字节 1):
-
Bit 6: I - 中断位。如果为1,表示设备请求一个中断。
-
-
Status (字节 2): 这是最重要的字段! 它是一个位图,每一位代表一种状态:
-
Bit 7: BSY - 设备繁忙。为1时,表示设备正忙,不能接受新命令。
-
Bit 6: DRDY - 设备就绪。为1时,表示设备已准备好接受命令。
-
Bit 5: DF - 设备故障。表示设备内部发生了无法恢复的错误。
-
Bit 4: DRQ - 数据请求。为1时,表示设备已准备好通过Data FIS发送或接收数据。
-
Bit 3: ERR - 错误。为1时,表示命令执行出错,具体错误原因在
Error寄存器中。 -
比方:Status寄存器就像一个飞机的仪表盘,BSY、DRDY、DRQ、ERR这些灯亮起,分别告诉飞行员(主机)飞机正处于什么状态。
-
-
Error (字节 3): 如果Status寄存器的ERR位为1,那么这个寄存器会指明具体的错误代码(如地址错误、介质错误、命令不支持等)。
8.3.2 实例:解析一个成功的 READ DMA EXT 响应
设备成功接收到上述读命令后,在准备好数据之前,会先发送一个D2H FIS。
-
Type= 0x34 -
Status= 0x58 (二进制: 0101 1000)-
Bit 7 (BSY) = 0 (不忙)
-
Bit 6 (DRDY) = 1 (就绪)
-
Bit 5 (DF) = 0 (无故障)
-
Bit 4 (DRQ) = 1 (请求数据传输,因为要发送数据给主机)
-
Bit 3 (ERR) = 0 (无错误)
-
-
这个D2H FIS的意思是:"命令已接受,没有错误,我(设备)已经准备好数据了,请准备接收Data FIS。"
8.4 数据 FIS
这是承载实际用户数据的FIS,用于在主机和设备之间传输扇区数据。
-
Type (字节 0): 0x46。
-
结构:非常简单。它由一个类型字节和紧随其后的数据载荷组成。数据载荷的长度必须是双字的整数倍,对于一个512字节的扇区,数据载荷为512字节,整个FIS就是 1 + 512 = 513 字节(填充到双字对齐)。
-
用途:
-
在写操作中,主机通过一个或多个Data FIS将数据发送给设备。
-
在读操作中,设备通过一个或多个Data FIS将数据发送给主机。
-
-
注意:一个大的数据传输(例如128KB)可能会被分割成多个Data FIS(每个通常包含8KB-16KB数据)进行传输。
8.5 DMA 激活 FIS
这是一个非常简短的FIS,主要用于在DMA传输开始时,由设备发送给主机,以触发主机端的DMA引擎开始工作。
-
Type (字节 0): 0x39。
-
结构:除了类型字节,它主要包含一个Tag字段(用于NCQ,见第10章),对于非NCQ操作,其他内容基本忽略。
-
作用:设备用它来通知主机:"数据已经就绪,请启动DMA读取"或"我已准备好,请开始DMA写入"。它充当DMA传输的"发令枪"。
8.6 其他FIS类型
SATA还定义了其他几种FIS类型,用于特定场景:
-
PIO Setup FIS: 由设备在PIO模式数据传输前发送,用于告知主机传输的详细信息(方向、数据量等)。Type = 0x5F。
-
BIST (Built-In Self-Test) FIS: 用于发起和报告设备的自检状态。Type = 0x58。
-
Set Device Bits FIS: 由设备发送,用于异步地更新主机端的状态和错误寄存器,而不需要主机发送命令。这在错误通知中很有用。Type = 0xA1。
本章小结
本章我们深入剖析了SATA通信的"灵魂"——FIS。我们了解到:
-
FIS是传输层定义的标准化信息结构,是主机与设备间所有有意义对话的载体。
-
H2D Register FIS 是主机向设备发号施令的"命令信",包含了完整的ATA命令参数。
-
D2H Register FIS 是设备向主机汇报工作的"状态报告",其Status寄存器是判断设备状态和命令成败的关键。
-
Data FIS 是搬运实际数据的"货车"。
-
DMA Activate FIS 是启动DMA传输的"信号枪"。
通过组合使用这些FIS,SATA实现了复杂的命令交互和数据传输。在下一章中,我们将上升到应用层,看看这些FIS是如何在一个完整的ATA命令执行流程中被组织和调用的,从而完成一个真实的读写请求。
第9章:SATA指令集与命令执行流程
在深入理解了传输层的FIS结构之后,我们现在可以上升到整个SATA协议栈的顶层——应用层,并俯瞰一个完整的命令执行流程。应用层直接与操作系统内核的存储驱动交互,它将抽象的I/O请求(如"读取文件")翻译成具体的ATA/ATAPI命令,并通过下层协议栈来执行。
本章将首先概览ATA命令集,然后通过一个完整的DMA读写操作,详细追踪命令的生命周期,将之前所学的物理层、链路层和传输层知识融会贯通。
9.1 ATA/ATAPI命令集概览
ATA命令集是一套标准化的指令,用于控制硬盘、光盘驱动器等存储设备。SATA在传输层和物理层进行了革新,但在应用层很大程度上继承了ATA命令集的语义。
9.1.1 命令分类
-
基本命令:几乎所有ATA设备都支持的命令,例如:
-
IDENTIFY DEVICE(0xEC):查询设备信息和能力。 -
READ SECTOR(S)(0x20/0x21):PIO模式读取。 -
WRITE SECTOR(S)(0x30/0x31):PIO模式写入。
-
-
扩展命令:为了支持更大容量和更先进功能而引入的命令,通常以
EXT结尾。-
READ DMA EXT(0x25):DMA模式读取,支持48位LBA。 -
WRITE DMA EXT(0x35):DMA模式写入,支持48位LBA。 -
READ FPDMA QUEUED(0x60):NCQ读取命令。 -
WRITE FPDMA QUEUED(0x61):NCQ写入命令。
-
-
特性命令:
-
SMART(0xB0):自我监测、分析和报告技术,用于预测设备故障。 -
SECURITY ERASE(0xF1):安全擦除,彻底销毁数据。
-
-
ATAPI命令:用于光盘驱动器等设备,其命令包通过
PACKET命令(0xA0)来传输。
9.1.2 命令执行模式
-
PIO (Programmed Input/Output):
-
工作原理:CPU通过I/O端口直接与设备寄存器交互,亲自"搬运"每一个数据字。
-
特点:简单,但CPU占用率高,性能差。在现代系统中,主要用于初始化、身份识别和一些非数据传输命令。
-
-
DMA (Direct Memory Access):
-
工作原理:CPU初始化DMA控制器后,由DMA控制器在设备和内存之间直接传输数据,无需CPU介入。传输完成后,DMA控制器通知CPU。
-
特点:极大降低了CPU占用率,提高了大数据量传输的效率。是SATA数据传输的主流模式。
-
9.2 一个完整的读写命令生命周期
让我们追踪一个典型的READ DMA EXT命令的完整执行过程。这个过程清晰地展示了各协议层如何协同工作。
场景:操作系统请求从设备的LBA 0x1000位置读取4个扇区(2KB)数据到内存地址0x80000000。
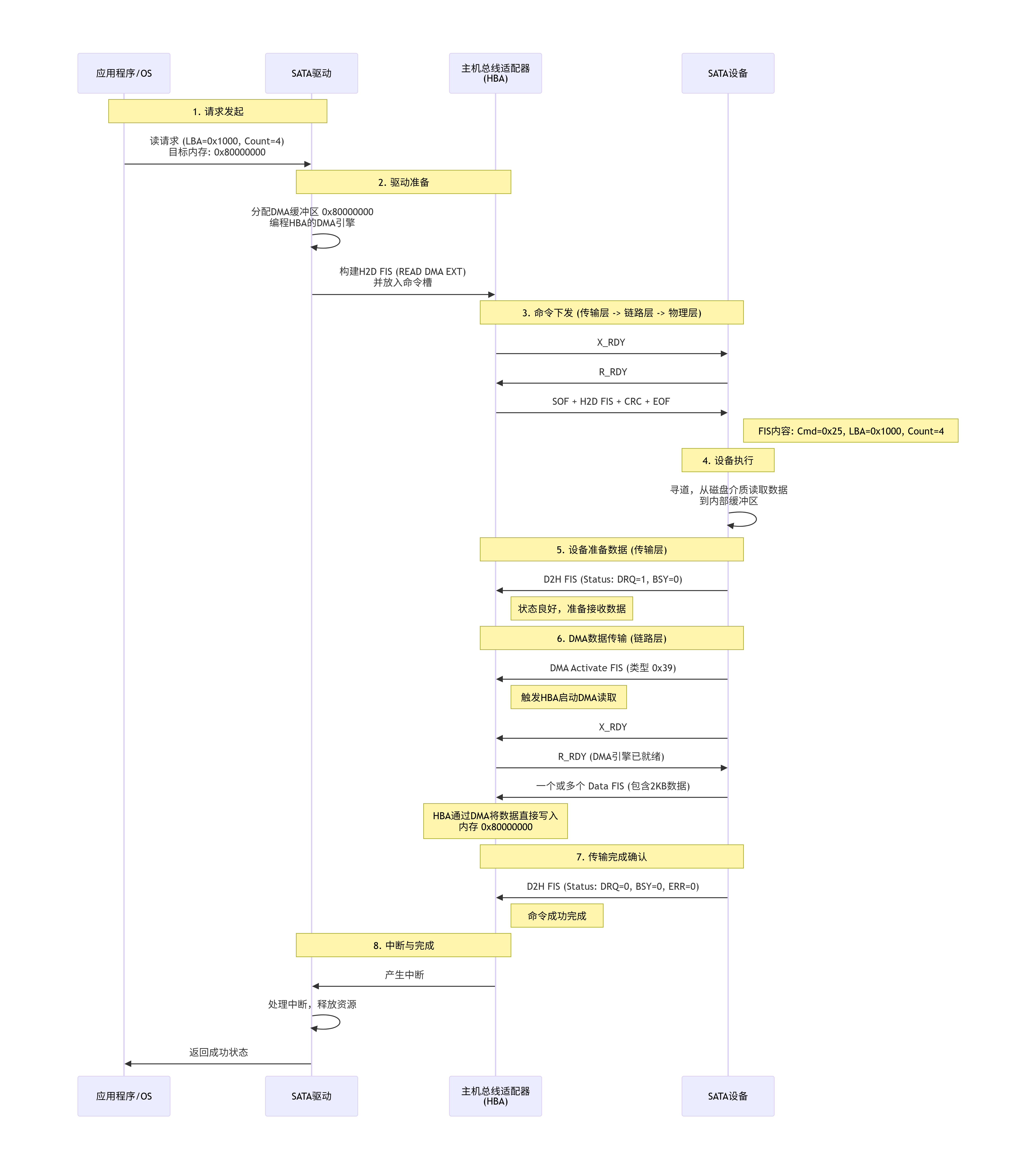
流程分步详解:
阶段1 & 2:请求发起与驱动准备(应用层)
-
应用程序通过系统调用发起读请求。
-
操作系统文件系统和块设备层将请求传递给SATA驱动程序。
-
驱动程序确保目标内存页面被锁定,并编程HBA的DMA引擎,告知其目标内存地址。
-
驱动程序构建一个
H2D Register FIS,其中包含:-
命令:
READ DMA EXT(0x25) -
LBA地址:0x1000
-
扇区计数:4
-
C位设置为1,表示这是命令。
-
-
驱动程序将这个FIS写入HBA的特定内存映射寄存器(或命令列表槽),并通知HBA有命令待处理。
阶段3:命令下发(传输层 -> 链路层 -> 物理层)
6. HBA的传输层将驱动交付的FIS准备好。链路层启动与设备的X_RDY/R_RDY握手。
7. 握手成功后,链路层将整个H2D FIS封装成一个帧(添加SOF、CRC、EOF),交给物理层。
8. 物理层进行8b/10b编码,通过差分信号线将帧发送给设备。
阶段4 & 5:设备执行与准备数据(设备端应用层)
9. 设备的物理层接收信号,解码后传递给链路层。链路层解帧,校验CRC,确认无误后将FIS payload(H2D FIS)传递给传输层。
10. 设备的传输层解析H2D FIS,识别出是READ DMA EXT命令,并将参数(LBA, Count)传递给应用层。
11. 设备的应用层(固件)执行命令:控制磁头臂(机械硬盘)或闪存控制器(SSD)从指定LBA读取4个扇区的数据,存入设备的内部缓冲区。
12. 数据准备好后,设备的传输层构建一个D2H Register FIS,其中Status寄存器设置为DRQ=1(数据请求)和BSY=0(不忙),并通过链路层和物理层发送回主机。这表示"命令已接受,数据已备好,请准备接收"。
阶段6:DMA数据传输(链路层)
13. 紧接着,设备的传输层构建一个DMA Activate FIS并发送。这个FIS充当发令枪,正式启动DMA传输。
14. 现在,设备要发送数据了。它作为发送方,开始发送X_RDY。
15. 主机的HBA(此时作为接收方)回复R_RDY。
16. 设备将一个或多个Data FIS(其中包含了那2KB的用户数据)发送给主机。
17. 关键点:当主机的链路层成功接收这些Data FIS时,HBA的DMA引擎会直接将FIS中的数据载荷写入到驱动程序之前指定的系统内存地址(0x80000000),而无需CPU的参与。这就是DMA高效的原因。
阶段7 & 8:传输完成与中断(传输层 -> 应用层)
18. 所有数据发送完毕后,设备的传输层发送最后一个D2H Register FIS,其中Status寄存器显示DRQ=0(数据传输完毕)且ERR=0(无错误)。这表示"整个读命令已成功完成"。
19. 主机的HBA接收到这个最终状态的D2H FIS后,会产生一个中断给CPU。
20. CPU响应中断,执行SATA驱动程序的中断服务程序。
21. 驱动程序处理中断,确认命令成功完成,然后释放相关资源(如DMA缓冲区)。
22. 最终,驱动程序向上层返回成功状态,应用程序可以访问0x80000000处的数据了。
9.3 关键命令深度解析
9.3.1 IDENTIFY DEVICE (0xEC)
这是主机识别设备身份的"自我介绍"命令。
-
过程:主机发送一个简单的H2D FIS(命令码0xEC)。设备则通过一个512字节的Data FIS回复一个数据结构,其中包含了设备的全部信息:
-
型号、序列号、固件版本。
-
支持的特性(LBA48, NCQ, TRIM等)。
-
总扇区数(用于计算容量)。
-
-
重要性:操作系统在启动时通过此命令来发现和初始化存储设备。
9.3.2 SMART (0xB0)
用于设备健康监测。
-
过程:主机通过H2D FIS的子命令来
READ SMART DATA或EXECUTE SMART OFF-LINE TESTS。设备通过Data FIS返回包含各种健康属性(重新分配扇区计数、通电时间、温度等)的数据。 -
应用:系统管理工具(如CrystalDiskInfo)利用此命令来预警潜在的设备故障。
9.3.3 TRIM (通过DATA SET MANAGEMENT命令 0x06)
这是为固态硬盘设计的关键命令。
-
问题:当文件系统删除一个文件时,它只是在元数据中标记空间为空闲,并不会通知SSD。SSD不知道这些数据块已经无效,在垃圾回收时仍会徒劳地搬运这些"垃圾"数据,影响性能和寿命。
-
解决方案:
TRIM命令。当文件系统删除数据时,它会向SSD发送一个TRIM命令,其中包含已删除数据对应的LBA范围。 -
作用:SSD收到
TRIM后,会在内部将这些LBA对应的数据块标记为无效。这样,垃圾回收过程就可以跳过这些块,显著提升写入性能和延长SSD寿命。
9.3.4 NCQ相关命令
我们将在第10章详细讨论NCQ,但在此可以先了解其命令码:
-
READ FPDMA QUEUED(0x60) -
WRITE FPDMA QUEUED(0x61)
这些命令与普通DMA命令的主要区别在于,它们包含一个Tag字段(0-31),用于标识该命令在设备的32级命令队列中的位置。
本章小结
本章我们完成了从协议栈顶层到底层的全景观察:
-
我们了解了ATA命令集是SATA设备功能的抽象接口。
-
我们通过一个详尽的
READ DMA EXT命令序列,完整追踪了一个I/O请求的生命周期:-
从应用层的请求发起。
-
到传输层的FIS构建与解析。
-
到链路层的帧封装与流量控制。
-
再到物理层的信号传输。
-
最后通过DMA和中断机制完成数据交付。
-
-
我们剖析了几个关键命令(
IDENTIFY,SMART,TRIM)的作用和意义。
这个过程清晰地展示了SATA协议栈分层设计的优越性:每一层各司其职,通过标准的接口交互,共同协作完成复杂的存储任务。在下一章中,我们将深入探讨SATA的一项革命性技术——原生命令队列(NCQ),看看它是如何通过重新排序命令来极大提升机械硬盘性能的。
第五部分:高级特性与性能优化
第10章:原生命令队列(NCQ)
在传统的存储访问模式中,命令按照到达的顺序被依次执行(FIFO)。对于机械硬盘而言,这种简单的模式存在着严重的性能缺陷,因为磁头臂的物理运动(寻道)是极其耗时的操作。原生命令队列 是SATA 2.0引入的一项革命性技术,它通过允许设备智能地重新排列待处理命令的执行顺序,最大限度地减少了磁头臂的无用运动,从而显著提升了机械硬盘在多任务负载下的性能。
10.1 为什么需要NCQ?机械硬盘的寻道瓶颈
要理解NCQ的价值,我们必须首先理解机械硬盘的物理结构和工作原理。
10.1.1 机械硬盘的物理瓶颈
一个机械硬盘主要由多个盘片、读写磁头和磁头臂组成。数据存储在盘片上一圈圈的磁道中。
-
寻道时间:磁头臂从一个磁道移动到另一个磁道所需的时间。
-
旋转延迟:盘片旋转,将目标扇区转到磁头下方所需的时间。
-
数据传输时间:实际读取或写入数据的时间。
在这三者中,寻道时间通常是耗时最长、对性能影响最大的因素,通常以毫秒计。
10.1.2 FIFO(先入先出)的弊端
在没有NCQ的情况下,硬盘必须按照主机发送命令的顺序来执行它们。
比方:想象一个图书管理员(磁头)在一个巨大的圆形书库(盘片)中为读者取书。读者的请求顺序是:
-
索取A区1号书(靠近门口)。
-
索取Z区50号书(最里面)。
-
索取B区2号书(靠近门口)。
按照FIFO顺序,管理员的动作为:
-
走到A区取书1 -> 返回门口交给读者。
-
走到Z区取书50 -> 返回门口。
-
走到B区取书2 -> 返回门口。
这个路径显然是低效的。最优的路径应该是:A区1号 -> B区2号 -> Z区50号,这样可以避免在门口和Z区之间的来回折返。
FIFO顺序导致了大量的磁头臂抖动,使硬盘大部分时间都在进行漫长的寻道,而不是传输数据。

(图注:NCQ通过重排序,将长距离寻道转换为短距离寻道,优化了磁头运动路径)
10.2 NCQ的工作原理:队列、乱序执行、完成重排序
NCQ的核心思想是赋予硬盘足够的"智慧",让其能够自己决定执行命令的最佳顺序。
10.2.1 NCQ的三大支柱
-
命令队列:
-
主机最多可以向设备发送32个读写命令,这些命令被设备缓存在一个内部队列中,而不是立即执行。
-
每个命令在队列中被分配一个唯一的Tag(0到31)。
-
-
乱序执行:
-
设备的固件( firmware )会分析队列中所有命令请求的LBA地址。
-
它使用一种算法(类似于电梯算法,SCAN或C-SCAN)来计算出一个总的寻道距离最短的命令执行序列。
-
设备按照这个优化后的序列来执行命令,而不是按照接收顺序。
-
-
完成重排序:
-
由于命令是乱序执行的,完成的顺序也与最初提交的顺序不同。
-
设备必须通过某种机制通知主机:"Tag为X的命令已经完成"。
-
主机需要能够处理这种乱序完成的情况。
-
10.2.2 NCQ的FIS机制:SActive、Queued FIS
NCQ引入了一套新的FIS类型和机制来支持上述功能。
-
SActive Register:这是一个32位的寄存器(在H2D FIS中传输),每一位代表一个Tag。主机在发送NCQ命令时,通过设置SActive寄存器中相应的位来告知设备:"这些Tag的命令已经在你的队列里了"。
-
NCQ命令FIS:
-
READ FPDMA QUEUED(0x60) -
WRITE FPDMA QUEUED(0x61) -
这些命令的FIS结构中包含一个Tag字段(0-31),指明该命令在队列中的标识。
-
-
DMA Setup FIS (Type 0x41):在NCQ读操作中,设备在发送数据之前,会先发送一个
DMA Setup FIS。这个FIS包含了即将传输的数据所对应的Tag,这样主机就知道接下来的数据属于哪个命令。 -
Set Device Bits FIS (Type 0xA1):这是NCQ完成通知的核心。设备通过发送
Set Device Bits FIS来异步地通知主机命令的完成状态。这个FIS中包含:-
SActive Field:设备通过清除这个字段中的位来告知主机:"这个Tag对应的命令已经完成"。
-
Status and Error Fields:报告命令执行的成功或失败。
-
10.3 一个NCQ读操作的综合流程
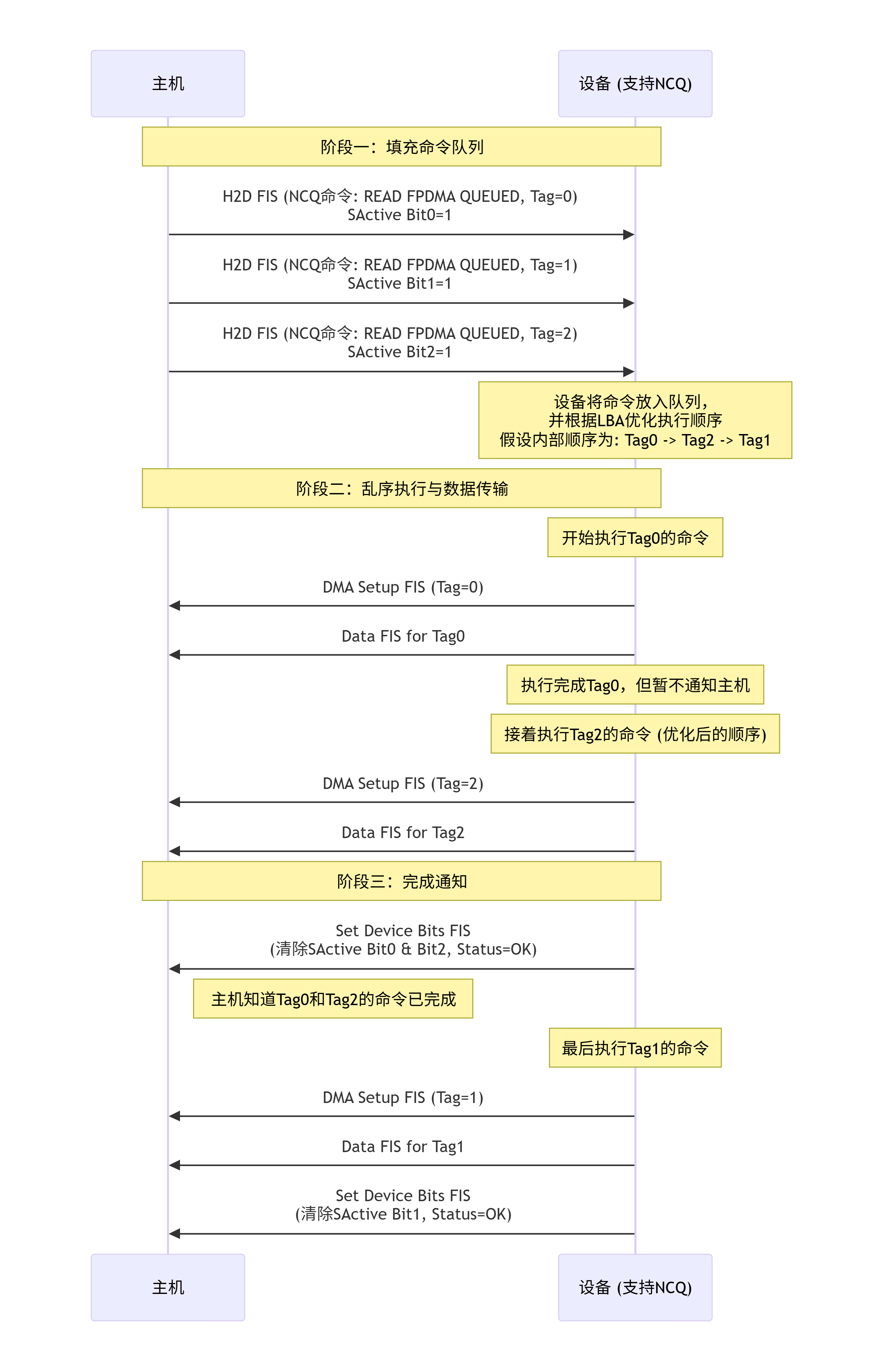
流程详解:
-
队列填充:主机连续发送3个NCQ读命令,分别标记为Tag 0, 1, 2,并通过SActive寄存器告知设备这些是活跃命令。
-
内部优化:设备固件分析这三个命令的LBA,决定最优执行顺序是Tag 0 -> Tag 2 -> Tag 1。
-
乱序执行与数据传输:
-
设备执行Tag 0的命令,在发送数据前,先发送
DMA Setup FIS (Tag=0),然后发送对应的Data FIS。 -
注意:此时设备并不立即通知Tag 0完成。它可能继续执行其他命令,以最大化性能。
-
设备接着执行Tag 2的命令,同样发送
DMA Setup FIS (Tag=2)和Data FIS。
-
-
批量完成通知:设备在完成Tag 0和Tag 2后,发送一个
Set Device Bits FIS,一次性清除SActive中的Bit 0和Bit 2,表示这两个命令都完成了。这种批量通知减少了协议开销。 -
完成剩余命令:设备最后执行并完成Tag 1的命令,并发送最终的完成通知。
10.4 NCQ对固态硬盘(SSD)的意义
你可能会问,SSD没有机械部件,没有寻道时间,为什么也需要NCQ?
对于SSD,NCQ的价值同样巨大,但原因不同:
-
最大化接口并行性:一个SSD内部由多个NAND闪存芯片组成,可以并行操作。NCQ的32级深度队列允许主机向SSD"浇灌"大量命令。SSD的控制器可以将这些命令智能地分发给空闲的芯片,实现极高的内部并行度,充分榨取SATA接口的带宽。
-
掩盖访问延迟:NAND闪存本身有读、写、擦除延迟。通过队列和乱序执行,SSD控制器可以在一个芯片进行慢速操作(如写入)时,去处理其他芯片的读取命令,从而掩盖延迟。
-
减少协议开销:NCQ的批量完成机制(
Set Device Bits FIS)相比非NCQ模式下每个命令都需要独立的D2H FIS确认,减少了中断次数和协议开销。
总而言之:
-
对机械硬盘,NCQ主要通过优化磁头臂运动来提升性能。
-
对固态硬盘,NCQ主要通过提升命令并行度和减少协议开销来提升性能。
本章小结
本章我们深入探讨了SATA协议中一项至关重要的性能优化技术——原生命令队列。我们了解到:
-
NCQ解决了机械硬盘寻道瓶颈导致的性能问题,通过智能重排序命令,将磁头臂的运动路径最小化。
-
NCQ的实现依赖于三大支柱:命令队列、乱序执行和完成重排序。
-
NCQ引入了一套新的FIS机制,包括SActive寄存器、Queued命令、DMA Setup FIS和关键的Set Device Bits FIS,来实现高效的命令管理和完成通知。
-
NCQ对于固态硬盘同样重要,它通过提升命令处理的并行度来充分发挥SSD的内部性能。
NCQ是SATA从一种简单的存储接口演变为一种高性能、智能化接口的标志。在下一章中,我们将转向SATA的另一个重要特性:热插拔与电源管理,看看SATA如何满足服务器和移动设备对可用性与能效的苛刻要求。
第11章:热插拔与电源管理
在现代计算环境中,系统的可用性和能效变得越来越重要。SATA协议从设计之初就考虑到了这些需求,提供了完善的热插拔支持和灵活的电源管理机制。本章将深入探讨SATA如何实现设备的热插拔,以及如何通过多级电源状态来平衡性能与功耗。
11.1 热插拔硬件支持
热插拔是指在系统运行期间,能够安全地添加或移除硬件设备而无需重启系统的能力。对于存储系统而言,这项功能对于服务器的持续运行、存储扩展和维护至关重要。
11.1.1 物理连接器设计
SATA连接器的物理设计为热插拔提供了基础支持:
-
** staggered spin-up:SATA电源连接器的引脚长度不同,如前文所述,地线和预充电引脚(第11引脚)比其他电源引脚更长。这种 staggered **(交错)设计确保了连接时的接触顺序:
-
地线首先接触,建立公共参考地。
-
预充电引脚接触,对设备内部的电容进行预充电,防止产生大的电涌。
-
最后,所有电源引脚(3.3V, 5V, 12V)和信号引脚完全接触。
-

-
信号线 Hot Plug Detect:虽然SATA标准没有明确的数据线热插拔检测引脚,但系统通常通过以下方式检测设备插入:
-
监测端口阻抗变化。
-
通过端口的3.3V供电线路检测电流变化。
-
在软件层面,通过定期轮询或中断来检测设备状态变化。
-
11.1.2 静电放电防护
热插拔操作容易产生静电放电,SATA设备通常包含ESD保护电路,防止在插拔过程中损坏敏感的电子元件。
11.2 软件与驱动对热插拔的处理
硬件支持只是热插拔的一部分,软件栈的配合同样重要。操作系统通过以下流程处理SATA设备的热插拔:
11.2.1 设备插入检测
-
硬件层检测:HBA检测到端口的电气连接变化。
-
通知操作系统:HBA通过中断或ACPI事件通知操作系统有设备插入。
-
端口复位与初始化:操作系统驱动对相应端口执行软复位,发送COMRESET等OOB信号,初始化链路。
-
设备识别:驱动发送
IDENTIFY DEVICE命令,获取设备信息和容量。 -
设备注册:操作系统将设备注册到系统存储栈中,使其对上层应用可见。
11.2.2 设备安全移除
为确保数据完整性,移除设备必须遵循安全流程:
-
用户请求:用户通过操作系统UI请求安全移除设备。
-
停止I/O:操作系统停止所有对该设备的读写操作,刷新写入缓存。
-
电源管理:驱动将设备置于低功耗状态。
-
解除注册:操作系统从存储栈中解除设备的注册。
-
用户通知:通知用户现在可以安全地物理移除设备。
11.2.3 意外移除处理
当设备被意外移除时(未经过安全移除流程),系统需要能够优雅地处理:
-
链路中断检测:HBA检测到链路失去同步(持续收到原语错误或完全无响应)。
-
I/O超时:所有正在进行的I/O操作都会超时。
-
错误处理:操作系统将设备标记为"丢失",向上层应用报告I/O错误。
-
系统恢复:清理与该设备相关的内核数据结构,防止系统崩溃。
11.3 SATA电源状态
SATA定义了一系列分层的电源状态,允许主机和设备在空闲时进入低功耗模式,在需要性能时快速恢复。这些状态在功耗和恢复延迟之间提供了不同的权衡。
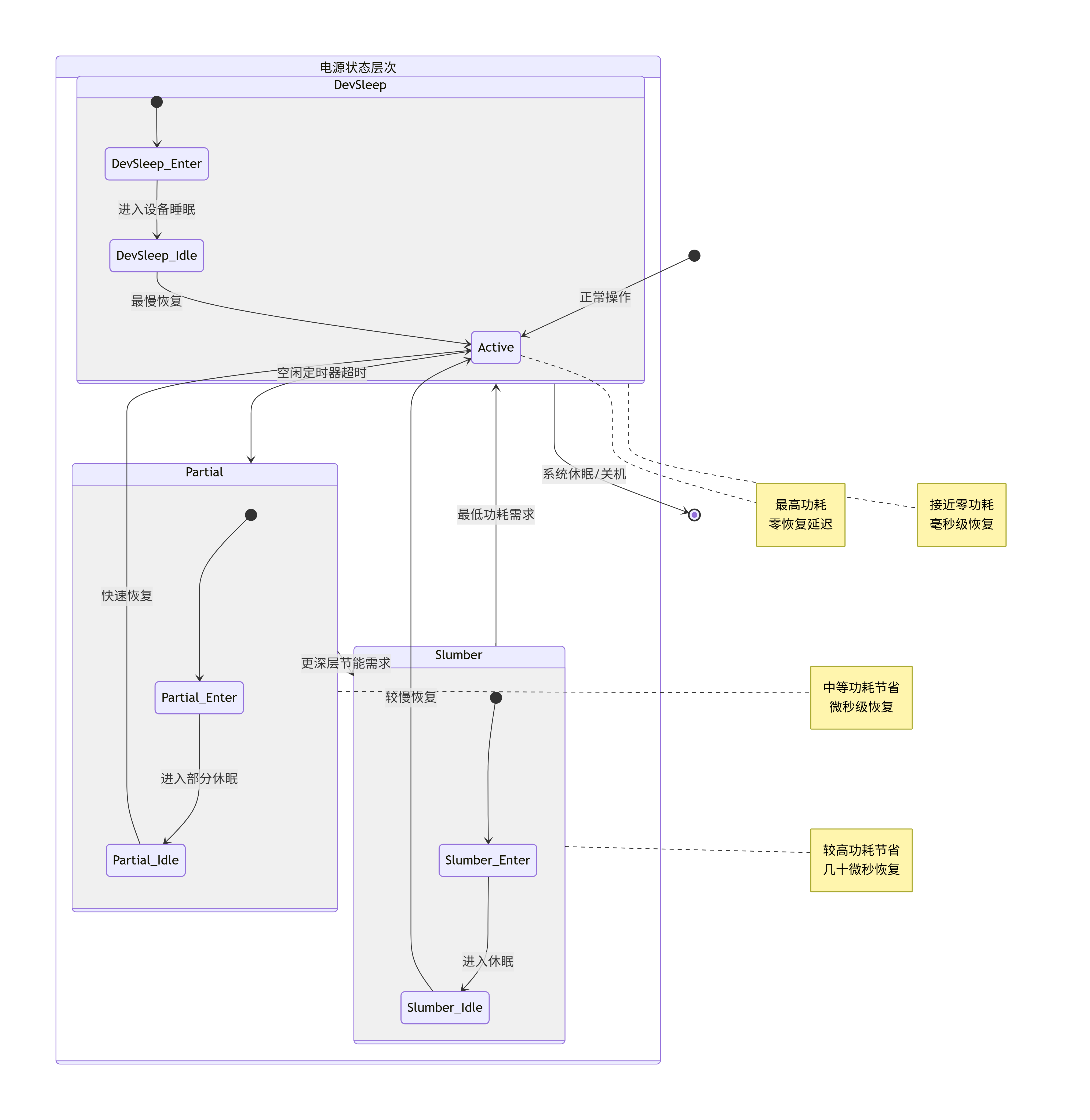
11.3.1 Active状态
-
功耗:最高,设备完全供电,链路完全活跃。
-
恢复延迟:零,设备立即响应命令。
-
使用场景:设备正在执行I/O操作或刚刚完成操作。
11.3.2 Partial状态
-
进入方式:通过交换
PMREQ_P/PMAK原语序列协商进入。 -
功耗:中等节省,部分电路被关闭,但PHY(物理层接口)保持部分活跃。
-
恢复延迟:极短(通常<10μs),通过交换几个原语即可快速恢复。
-
使用场景:短时间空闲,需要快速恢复的情况。
11.3.3 Slumber状态
-
进入方式:通过交换
PMREQ_S/PMAK原语序列协商进入。 -
功耗:较高的节省,更多的电路被关闭,包括大部分PHY功能。
-
恢复延迟:较长(通常几十微秒),需要重新校准PHY。
-
使用场景:较长时间的空闲,可以容忍稍长的恢复时间。
11.3.4 DEVSLP (Device Sleep) 状态
这是SATA 3.2引入的超低功耗状态,专门为移动设备和节能需求强烈的环境设计。
-
进入方式:通过专门的
DEVSLP引脚信号和寄存器配置进入。 -
功耗:极低,接近完全断电的状态(仅保持最基本的电路供电以检测唤醒信号)。
-
恢复延迟:最长(毫秒级),需要几乎完全重新初始化设备。
-
优势:
-
与传统Slumber状态相比,功耗可降低97%以上。
-
设备几乎完全断电,仅保留最低限度的唤醒检测能力。
-
-
使用场景:移动设备在睡眠模式、极长时间空闲的情况。
11.3.5 电源状态转换机制
电源状态的转换是通过主机和设备之间的协商完成的:
-
主机发起:主机决定让设备进入某个低功耗状态。
-
原语协商:主机发送相应的电源管理请求原语(
PMREQ_P或PMREQ_S)。 -
设备确认:如果设备同意进入该状态,则回复
PMAK原语。 -
状态转换:双方同时转换到请求的电源状态。
-
唤醒:当有I/O需求时,主机通过发送特定的原语序列或信号(对DEVSLP)来唤醒设备。
11.4 实际应用场景
11.4.1 桌面系统
-
通常不使用热插拔功能。
-
电源管理相对简单,可能在系统空闲时进入Partial状态。
11.4.2 服务器环境
-
热插拔:关键功能,允许在线更换故障硬盘或扩展存储容量。
-
电源管理:通常较为保守,优先考虑性能和响应速度,可能禁用深度睡眠状态。
11.4.3 移动设备
-
热插拔:较少使用,因为存储设备通常是内置的。
-
电源管理:极其重要,广泛使用DEVSLP等深度睡眠状态来延长电池寿命。操作系统会根据使用模式智能地在电源状态间切换。
11.5 热插拔与电源管理的协同工作
在实际系统中,热插拔和电源管理是紧密相关的:
-
新插入的设备初始状态是Active。
-
安全移除设备前,系统会先将其置于低功耗状态。
-
系统可以根据设备是内置还是外置来调整电源管理策略(例如,对外置USB-SATA桥接盘可能采用更积极的休眠策略)。
本章小结
本章我们深入探讨了SATA协议在可用性和能效方面的两大高级特性:
-
热插拔通过精心的硬件设计( staggered 引脚、ESD保护)和完整的软件支持(设备检测、安全移除、错误处理),实现了设备的不停机更换,极大地提升了系统的可维护性和可用性。
-
电源管理通过分层级的电源状态(Active/Partial/Slumber/DEVSLP),在性能和功耗之间提供了精细化的权衡控制,使SATA设备能够适应从高性能服务器到电池供电的移动设备等各种应用场景。
这两项特性体现了SATA协议设计的成熟性和全面性,不仅关注基础的数据传输性能,也充分考虑到了实际部署中的运维需求和能效挑战。在下一章中,我们将探讨SATA的扩展能力——端口 multipliers 与端口选择器,看看SATA如何突破单端口单设备的限制,实现更复杂的拓扑结构。
第12章:端口 multipliers 与端口选择器
SATA的点对点架构是其设计优势,但也带来了一个明显的限制:一个SATA主机端口只能连接一个设备。这在需要连接大量驱动器的场景(如外部存储阵列)或需要高可用性的环境中显得不够灵活。为了突破这一限制,SATA标准引入了两种重要的扩展技术:端口 multipliers (端口复用器) 和端口选择器。本章将深入探讨这两种技术的原理、实现和应用。
12.1 端口 multiplier (PM):一个端口如何连接多个设备?
端口 multiplier 是一种硬件设备,它允许单个SATA主机端口与多个SATA设备进行通信,实质上是将主机的单一连接"扩展"为多个连接。
12.1.1 基本架构与工作原理
端口 multiplier 在逻辑上位于主机和设备之间,对主机呈现为一个普通的SATA设备,同时对各个连接设备呈现为一个标准的主机控制器。
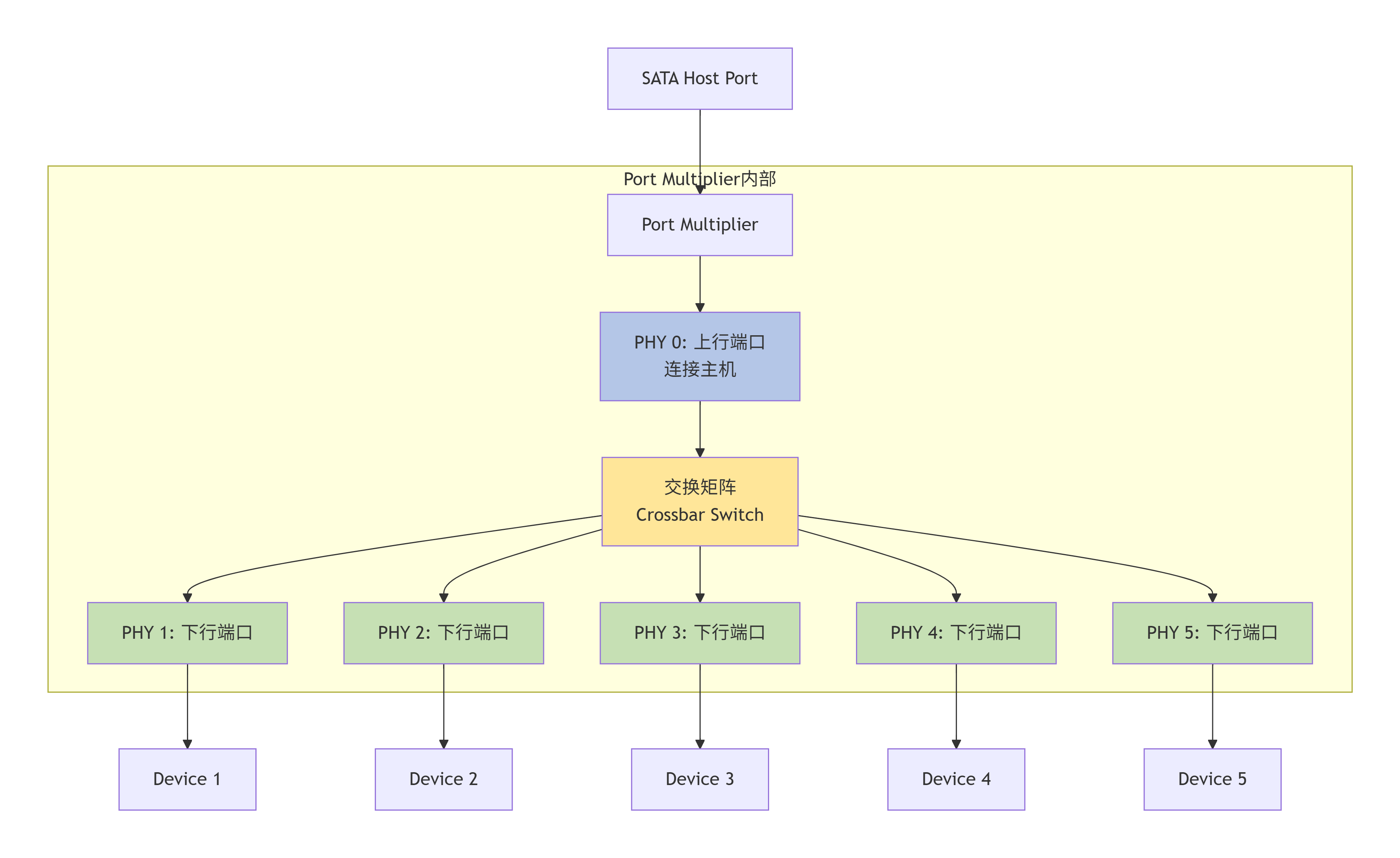
核心组件:
-
上行端口:连接主机的一个标准SATA端口。
-
下行端口:连接SATA设备的多个端口(通常支持4或5个设备,最多可达15个)。
-
交换矩阵:负责在主机和设备之间路由FIS。
-
PM控制器:管理端口 multiplier 自身的配置和状态。
12.1.2 帧路由机制
端口 multiplier 的核心功能是正确地路由FIS。这是通过两种主要机制实现的:
1. 基于端口号的路由(命令型路由)
这是最基本的路由方式。主机在发送给端口 multiplier 的FIS中指定目标端口号。
-
H2D FIS中的设备字段:在发送给端口 multiplier 的H2D Register FIS中,Device寄存器的低4位用于指定目标下行端口号(0-15)。
-
路由过程:
-
主机发送H2D FIS到端口 multiplier,其中包含目标端口号。
-
端口 multiplier 解析FIS中的端口号。
-
端口 multiplier 将FIS转发到指定的下行端口。
-
对应设备的响应通过端口 multiplier 返回给主机。
-
2. 基于FIS类型的路由
对于某些FIS类型,端口 multiplier 能够自动确定路由方向:
-
D2H Register FIS:自动路由到主机。
-
Data FIS:根据之前的命令FIS建立的连接进行路由。
-
Set Device Bits FIS:自动路由到主机。
12.1.3 端口 multiplier 的通信协议
端口 multiplier 本身对主机呈现为一个SATA设备,支持标准的IDENTIFY DEVICE命令。当主机查询连接到端口 multiplier 的设备时,需要特殊的通信协议:
-
发现端口 multiplier:主机首先向端口 multiplier 的上行端口发送
IDENTIFY DEVICE命令。在返回的数据中,特定的位字段表明该设备是一个端口 multiplier,并报告其支持的下行端口数量。 -
访问连接设备:为了访问特定的下行设备,主机需要:
-
在发送给端口 multiplier 的FIS中指定目标端口号。
-
使用
READ DMA EXT或WRITE DMA EXT等标准命令。 -
端口 multiplier 负责将命令路由到正确的设备。
-
-
并发访问限制:虽然端口 multiplier 连接了多个设备,但上行链路只有一条。这意味着在同一时刻,只能有一个下行设备与主机进行数据传输。多个设备可以同时接收命令并准备数据,但实际的数据传输是串行进行的。
12.2 端口选择器:实现冗余与高可用
端口选择器是另一种SATA扩展设备,它解决的是高可用性问题,而非端口扩展问题。
12.2.1 设计目标与应用场景
端口选择器的主要目标是为单个SATA设备提供到两个独立主机端口的连接,实现主动-被动式的冗余配置。
典型应用场景:
-
服务器高可用:在双控制器存储系统中,单个硬盘需要能够被两个控制器访问。
-
故障切换:当主控制器故障时,备用控制器可以接管存储设备。
-
负载均衡:在某些配置中,可以在控制器间分配工作负载。
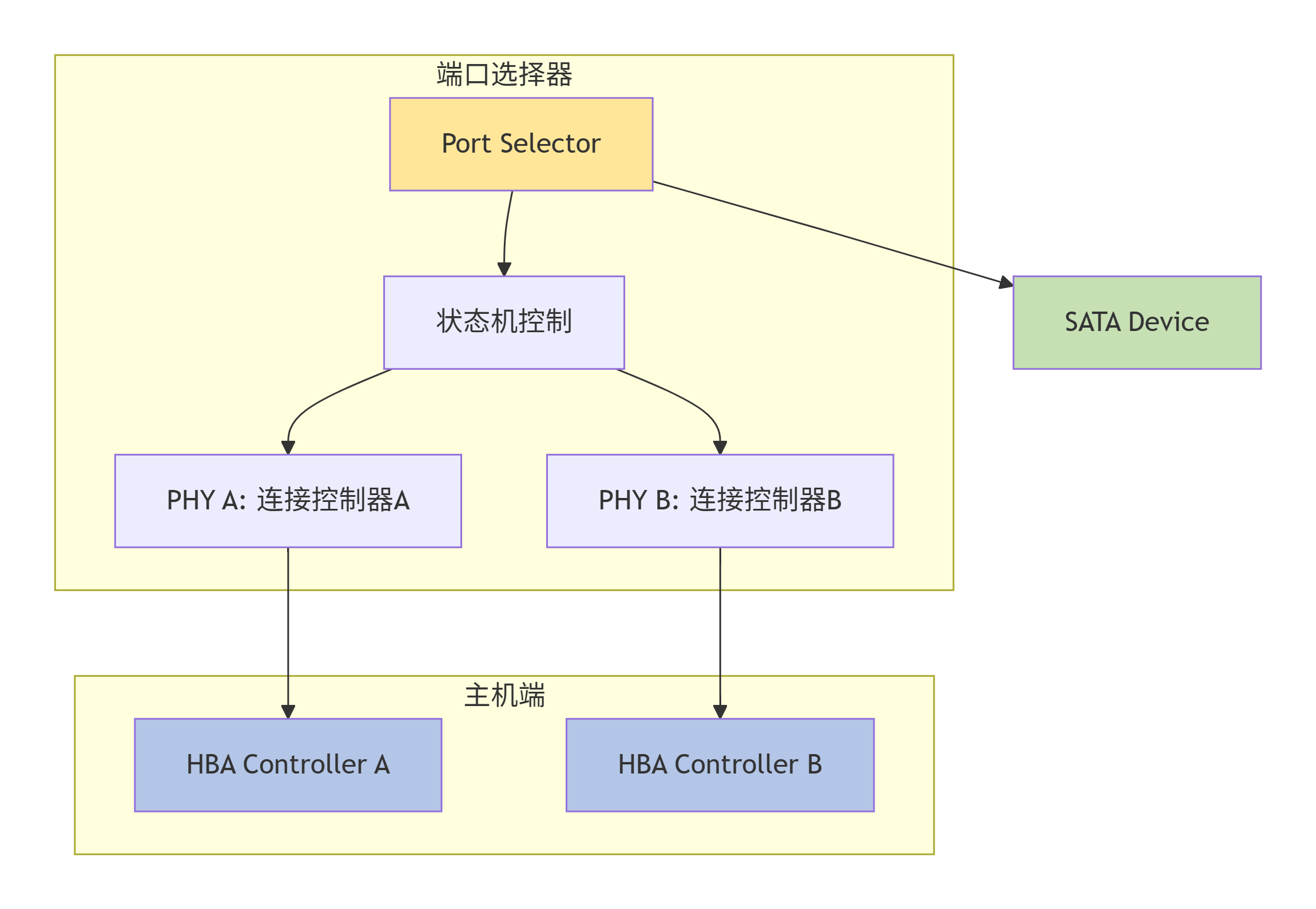
12.2.2 工作原理
端口选择器本质上是一个2:1的多路复用器,其核心是一个状态机,决定哪个主机端口可以访问设备:
-
初始状态:通常选择预定义的主端口(如端口A)作为活动端口。
-
链路监测:端口选择器持续监测两个上行端口的链路状态。
-
故障检测:如果活动端口的链路丢失(如线缆断开、控制器故障),端口选择器自动切换到备用端口。
-
切换机制:切换可以通过以下方式触发:
-
自动切换:基于链路状态检测。
-
手动切换:通过特定的SATA命令。
-
带外信号:通过专门的引脚或信号。
-
-
切换过程:
-
断开与当前活动端口的连接。
-
重置SATA设备(模拟热插拔)。
-
通过备用端口建立新连接。
-
备用主机重新识别设备并恢复I/O操作。
-
12.2.3 与端口 multiplier 的区别
虽然两者都是SATA扩展设备,但它们解决的问题完全不同:
| 特性 | 端口 multiplier | 端口选择器 |
|---|---|---|
| 连接方向 | 1个主机 → N个设备 | 2个主机 → 1个设备 |
| 主要目标 | 端口扩展 | 高可用性、冗余 |
| 拓扑结构 | 星型 | 双星型 |
| 数据传输 | 分时复用上行带宽 | 同一时刻只有一个活动上行链路 |
| 典型应用 | 外部存储扩展坞 | 双控制器存储阵列 |
12.3 高级特性与配置
12.3.1 端口 multiplier 的寻址方式
除了基本的端口号寻址外,端口 multiplier 还支持更高级的寻址模式:
-
命令基切换:默认模式,每个命令都显式指定目标端口。
-
帧信息结构传递:支持更复杂的路由规则,可以基于FIS内容进行路由决策。
12.3.2 端口 multiplier 的带宽限制
这是端口 multiplier 的一个重要限制因素:
-
聚合带宽:所有下行端口的理论总带宽可能远大于上行链路的带宽。
-
实际瓶颈:上行链路的带宽成为整个系统的瓶颈。
-
性能影响:当多个设备同时进行大量数据传输时,它们必须共享上行链路的带宽。
举例说明:
一个SATA 3.0端口 multiplier(上行链路6 Gb/s)连接了5个SATA 3.0设备(每个设备理论带宽6 Gb/s)。虽然每个设备都能以全速与端口 multiplier 通信,但它们与主机的通信被限制在共享的6 Gb/s上行链路上。
12.3.3 交错旋转
在连接多个机械硬盘的端口 multiplier 配置中,可以配置交错旋转启动功能:
-
问题:多个硬盘同时启动会产生巨大的电流冲击。
-
解决方案:端口 multiplier 可以延迟各个硬盘的启动时间,使它们错开启动。
-
实现:通过 staggered spin-up 功能,在设备初始化时依次发送COMRESET信号。
12.4 实际部署考虑
12.4.1 兼容性考虑
-
主机控制器支持:并非所有SATA控制器都完全支持端口 multiplier。需要确认HBA和驱动程序的支持情况。
-
操作系统支持:现代主流操作系统(Windows、Linux、macOS)都提供端口 multiplier 支持,但可能需要特定驱动程序。
-
设备兼容性:大多数SATA设备可以与端口 multiplier 正常工作,但某些特殊功能的设备可能有兼容性问题。
12.4.2 性能优化
-
NCQ的重要性:在端口 multiplier 环境中,NCQ变得尤为重要,因为它允许设备在等待上行链路可用时对命令进行排队和优化。
-
上行链路选择:对于高性能应用,应考虑使用多个独立的端口 multiplier,而不是将所有设备集中到单个端口 multiplier。
-
负载均衡:通过智能的负载分配,避免多个高负载设备竞争同一上行链路。
12.4.3 故障排除
-
链路状态监控:监控端口 multiplier 和各下行端口的链路状态。
-
带宽监控:监控上行链路的利用率,识别性能瓶颈。
-
错误统计:关注CRC错误、重传等链路质量指标。
12.5 综合应用实例:中小企业存储解决方案
考虑一个为中小企业设计的低成本NAS存储解决方案:
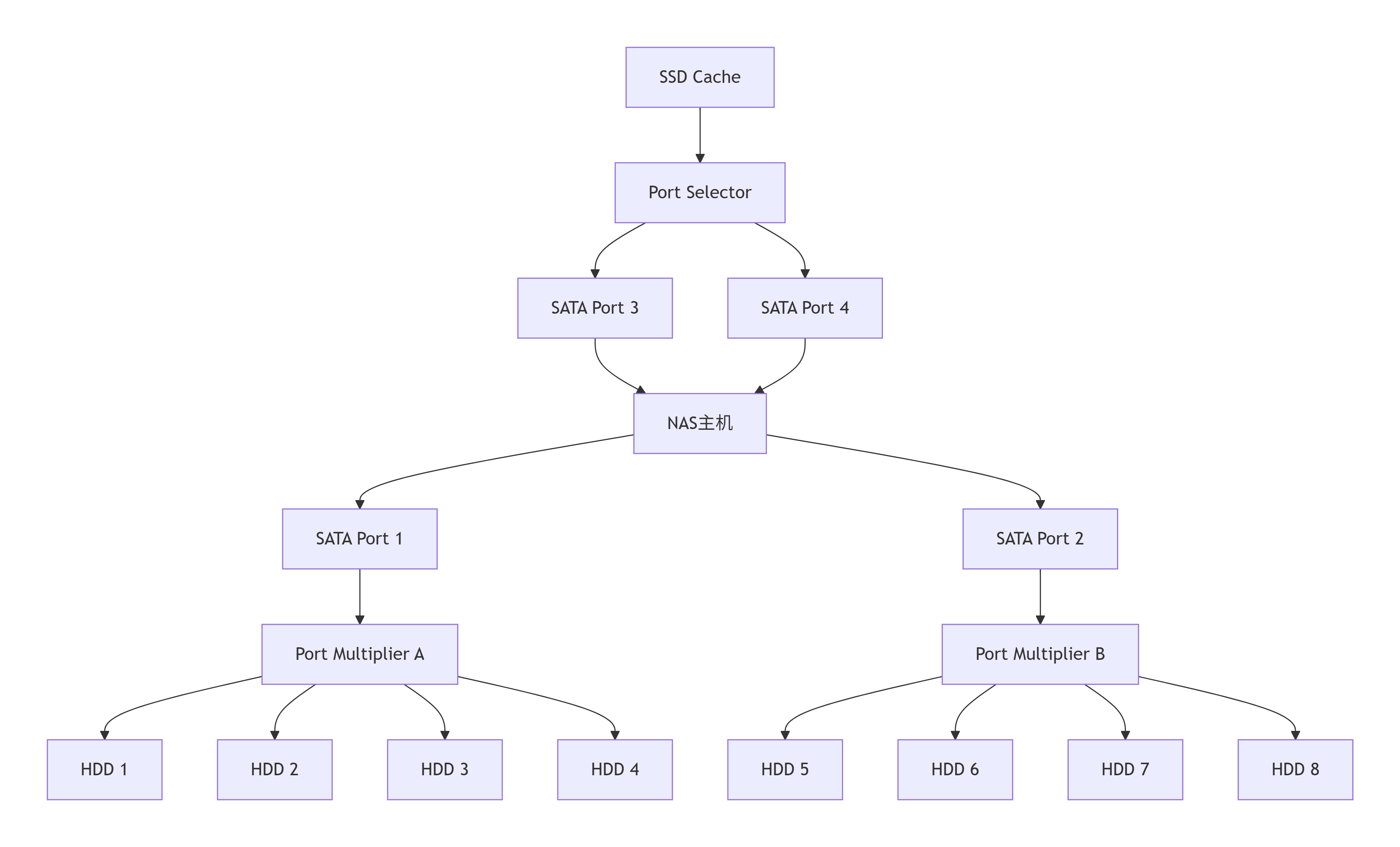
设计说明:
-
HDD存储:8个硬盘通过2个端口 multiplier 连接到2个主机端口,实现了端口扩展。
-
SSD缓存:高性能SSD通过端口选择器连接到2个主机端口,提供冗余访问路径。
-
优势:
-
用较少的主机端口支持了大量设备。
-
关键组件(SSD缓存)具有高可用性。
-
成本效益高,无需昂贵的RAID控制器。
-
本章小结
本章我们深入探讨了SATA协议的两种重要扩展技术:
-
端口 multiplier 通过帧路由机制,实现了单个主机端口与多个设备的通信,极大地扩展了SATA的连接能力,特别适用于外部存储扩展等场景。
-
端口选择器 通过双上行链路和自动故障切换,为存储设备提供了高可用性保障,是构建可靠存储系统的关键组件。
这两种技术充分体现了SATA协议的灵活性和可扩展性,使其能够适应从简单桌面存储到复杂企业存储的各种应用需求。它们虽然增加了系统的复杂性,但在适当的应用场景中提供了显著的成本和功能优势。
在接下来的章节中,我们将转向更实践性的内容,探讨SATA协议的调试和分析方法,以及如何识别和解决常见的SATA通信问题。
第六部分:协议分析、调试与未来
第13章:SATA协议分析实战
理论知识的最终价值在于解决实际问题。当SATA系统出现故障或性能问题时,能够深入协议层面进行分析是至关重要的。本章将介绍如何使用专业工具进行SATA协议分析,并通过实际案例展示如何诊断和解决常见的SATA问题。
13.1 使用协议分析仪捕获SATA流量
协议分析仪是深入理解SATA通信的"显微镜",它能够非侵入式地捕获和分析SATA链路上的所有活动。
13.1.1 协议分析仪的类型与连接
-
硬件协议分析仪:专用硬件设备,通过SATA拦截器或插槽直接连接到主机和设备之间。
-
优点:高性能,可捕获全速流量,提供精确的时序分析。
-
缺点:成本高昂,需要物理访问连接。
-
-
基于HBA的分析仪:利用支持调试功能的主机总线适配器。
-
优点:成本较低,无需物理拦截。
-
缺点:可能无法捕获所有底层细节,依赖HBA厂商支持。
-
连接示意图:
13.1.2 捕获配置要点
-
速度匹配:分析仪必须支持被测链路的速率(1.5G/3G/6G)。
-
触发条件:设置适当的触发条件来捕获感兴趣的事件:
-
特定原语(如
SYNC、X_RDY) -
特定FIS类型(如H2D Register FIS)
-
错误条件(CRC错误)
-
-
缓冲区管理:配置足够的捕获缓冲区,确保能够捕获完整的问题场景。
-
时间戳精度:高精度时间戳对于分析时序相关问题时至关重要。
13.2 解码一个真实的读写操作
让我们通过分析仪的实际输出来理解一个完整的SATA读写操作。以下是简化的分析仪输出,展示了关键事件:
时间戳(ns) 事件类型 详细信息 -------------------------------------------------------------------------- 0000000000 OOB序列 Host发送COMRESET 0000012000 OOB序列 Device回复COMINIT 0000025000 OOB序列 Host发送COMWAKE 0000038000 OOB序列 Device回复COMWAKE 0000050000 原语流 持续交换ALIGN原语0000120000 帧传输 Host -> DeviceSOF K27.7FIS类型 H2D Register FIS (0x27)命令 READ DMA EXT (0x25)LBA 0x0012345600扇区数 8CRC 0x89ABCDEFEOF K29.70000125000 原语 Host: X_RDY 0000125005 原语 Device: R_RDY0000130000 帧传输 Device -> HostSOF K27.7FIS类型 D2H Register FIS (0x34)状态 DRDY=1, DRQ=1, ERR=0CRC 0xFEDCBA98EOF K29.70000132000 帧传输 Device -> HostSOF K27.7 FIS类型 DMA Activate FIS (0x39)CRC 0x12345678EOF K29.70000134000 原语 Device: X_RDY 0000134002 原语 Host: R_RDY0000138000 帧传输 Device -> HostSOF K27.7FIS类型 Data FIS (0x46)数据长度 4096字节 (8 sectors)CRC 0x55AA55AAEOF K29.70000145000 帧传输 Device -> HostSOF K27.7FIS类型 D2H Register FIS (0x34)状态 DRDY=1, DRQ=0, ERR=0CRC 0x66554433EOF K29.7
操作解读:
-
链路初始化(0-5μs):完成OOB序列和ALIGN同步。
-
命令下发(12μs):主机发送读命令,请求LBA 0x12345600开始的8个扇区。
-
设备准备(12.5-13μs):流量控制握手和设备状态响应。
-
数据传输(13.2-13.8μs):DMA激活和数据帧传输。
-
完成确认(14.5μs):设备报告命令成功完成。
13.3 常见故障的协议级表现与分析思路
13.3.1 链路训练失败
症状:
-
持续发送OOB信号但无响应。
-
反复尝试速度协商但无法建立稳定连接。
协议分析表现:
时间戳(ns) 事件类型 详细信息 -------------------------------------------------------------------------- 0000000000 OOB序列 Host发送COMRESET 0000012000 OOB序列 Host发送COMRESET 0000024000 OOB序列 Host发送COMRESET ... ... 重复COMRESET,无设备响应
可能原因:
-
物理连接问题(线缆损坏、连接器污染)。
-
设备供电异常。
-
设备物理层故障。
-
信号完整性问题(过长的线缆、阻抗不匹配)。
诊断步骤:
-
检查物理连接和电源。
-
使用示波器检查信号质量。
-
尝试更换线缆和设备。
-
检查主机和设备的速度兼容性。
13.3.2 CRC错误与重传
症状:
-
系统日志中出现CRC错误记录。
-
性能下降,I/O操作超时。
协议分析表现:
时间戳(ns) 事件类型 详细信息 -------------------------------------------------------------------------- 0000000000 帧传输 Host -> Device: Data FISCRC 0x12345678 (发送端计算)0000005000 帧传输 Device检测到CRC错误(接收端计算CRC为0x12345679)0000010000 原语 Device发送SYNC 0000010005 原语 Host回复SYNC 0000012000 原语 交换ALIGN原语0000020000 原语 Host: X_RDY (重传) 0000020002 原语 Device: R_RDY 0000025000 帧传输 Host -> Device: Data FIS (重传相同内容)CRC 0x12345678
可能原因:
-
信号完整性问题(噪声、反射、衰减)。
-
时钟抖动过大。
-
物理连接器接触不良。
-
电磁干扰。
诊断步骤:
-
分析CRC错误发生的模式(随机还是持续)。
-
检查链路速率,尝试降低速率看是否改善。
-
使用示波器进行眼图分析,评估信号质量。
-
检查接地和屏蔽。
13.3.3 设备无响应
症状:
-
命令超时,设备不响应。
-
系统将设备标记为离线。
协议分析表现:
时间戳(ns) 事件类型 详细信息 -------------------------------------------------------------------------- 0000000000 帧传输 Host -> Device: H2D Register FIS 0000005000 原语 Host: X_RDY (等待响应) 0000010000 原语 Host: X_RDY (等待响应) 0000015000 原语 Host: X_RDY (等待响应) 0000020000 原语 Host发送SYNC (超时恢复) 0000020005 原语 无设备响应 0000030000 OOB序列 Host发送COMRESET (尝试重新初始化)
可能原因:
-
设备固件崩溃或死锁。
-
电源管理状态异常。
-
设备硬件故障。
-
协议违反导致状态机卡住。
诊断步骤:
-
检查设备电源状态。
-
尝试硬件复位。
-
分析之前的通信序列,寻找协议违反。
-
检查设备温度和其他健康指标。
13.3.4 性能瓶颈分析
症状:
-
实际传输速率远低于理论值。
-
高延迟,系统响应缓慢。
协议分析表现:
时间戳(ns) 事件类型 详细信息 -------------------------------------------------------------------------- 0000000000 帧传输 Host发送命令 0000005000 原语 Host: X_RDY 0000020000 原语 Device: R_IP (设备繁忙) 0000050000 原语 Device: R_IP (设备繁忙) 0000080000 原语 Device: R_RDY (终于准备好) 0000085000 帧传输 开始数据传输...0000200000 原语 Device: R_IP (再次繁忙) 0000250000 原语 Device: R_RDY ... ... 频繁的R_IP和长时间等待
可能原因:
-
设备内部处理瓶颈(寻道时间、内部缓冲区不足)。
-
NCQ配置不当。
-
主机端DMA引擎配置问题。
-
中断处理延迟。
诊断步骤:
-
分析
R_IP原语的出现频率和持续时间。 -
检查NCQ是否启用和工作正常。
-
监控设备内部队列深度和命令处理时间。
-
分析主机端驱动程序和中断负载。
13.4 高级调试技巧
13.4.1 关联分析
将协议分析与其他系统指标关联:
-
与系统日志关联:将协议事件与操作系统日志中的错误和时间戳对应。
-
与性能计数器关联:结合HBA性能计数器和设备SMART数据。
-
与电源状态关联:分析电源状态转换对性能的影响。
13.4.2 统计分析与趋势识别
-
错误率统计:计算CRC错误率、重传率等指标。
-
延迟分析:测量命令响应时间、数据传输延迟。
-
吞吐量分析:分析有效数据传输率与理论带宽的差距。
13.4.3 自动化测试与验证
-
压力测试:设计特定工作负载来暴露边界条件问题。
-
回归测试:在固件或驱动程序更新后验证协议兼容性。
-
一致性测试:验证实现是否符合SATA规范。
13.5 实际案例研究
案例:数据中心中的间歇性CRC错误
背景:某数据中心报告特定型号的SSD在特定HBA上出现间歇性CRC错误。
调查过程:
-
模式识别:通过协议分析发现错误主要发生在大量小尺寸随机写入时。
-
环境分析:错误只在特定机架位置出现,与散热风道相关。
-
根本原因分析:
-
温度分析显示问题SSD在高温时信号质量下降。
-
协议分析捕获到在高温下信号眼图闭合,导致CRC错误增加。
-
HBA的均衡器设置对该SSD的信号特性优化不足。
-
解决方案:
-
改善机架散热,降低SSD工作温度。
-
更新HBA固件,优化信号均衡参数。
-
在驱动程序中添加温度监控和节流机制。
结果:CRC错误率从0.1%降低到0.001%,问题解决。
本章小结
本章我们深入探讨了SATA协议分析的实战方面:
-
我们了解了协议分析仪的工作原理和使用方法,这是深入诊断SATA问题的关键工具。
-
我们通过实际解码示例,展示了如何解读SATA通信的各个阶段。
-
我们详细分析了常见故障的协议级表现,包括链路训练失败、CRC错误、设备无响应和性能瓶颈。
-
我们介绍了高级调试技巧,如关联分析、统计分析和自动化测试。
-
通过实际案例,我们展示了如何将协议分析应用于解决真实的工程问题。
掌握SATA协议分析技能对于存储系统开发、验证和故障排除至关重要。它使工程师能够超越黑盒调试,真正理解系统内部的工作机制,从而快速定位和解决问题。
第14章:SATA与NVMe的对比及未来展望
在深入理解了SATA协议的方方面面之后,我们现在必须面对存储技术领域一个不可忽视的现实:SATA正面临着来自NVMe技术的严峻挑战。本章将从架构根源出发,深入比较SATA与NVMe的根本差异,分析各自的优劣势,并探讨SATA在NVMe主导的未来中的定位和价值。
14.1 架构的根本差异:AHCI vs. PCIe
要理解SATA与NVMe的性能差距,必须追溯到它们的基础架构差异。
14.1.1 SATA的软件栈:AHCI的遗产
SATA在软件层面继承了并行ATA的AHCI(Advanced Host Controller Interface)标准,这是一个为机械硬盘时代设计的接口。
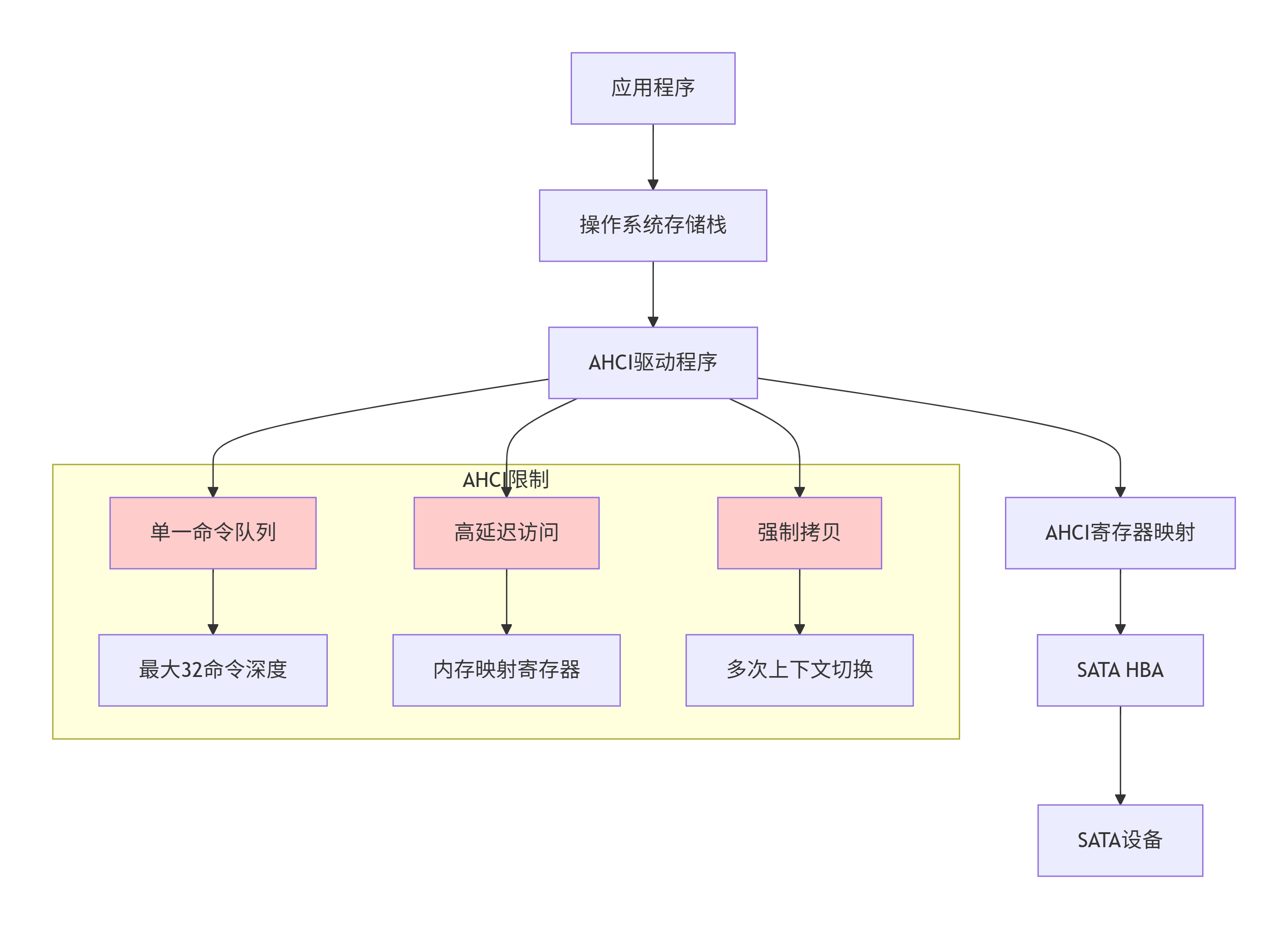
AHCI的关键限制:
-
单一命令队列:只有一个32槽的命令队列,所有I/O请求必须串行处理。
-
高延迟访问:通过内存映射寄存器进行通信,每次访问都需要数千个CPU周期。
-
强制数据拷贝:数据在系统内存中需要多次拷贝,增加了延迟和CPU开销。
-
中断密集型:每个命令完成都需要中断处理,在高IOPS负载下CPU占用率很高。
14.1.2 NVMe的现代架构
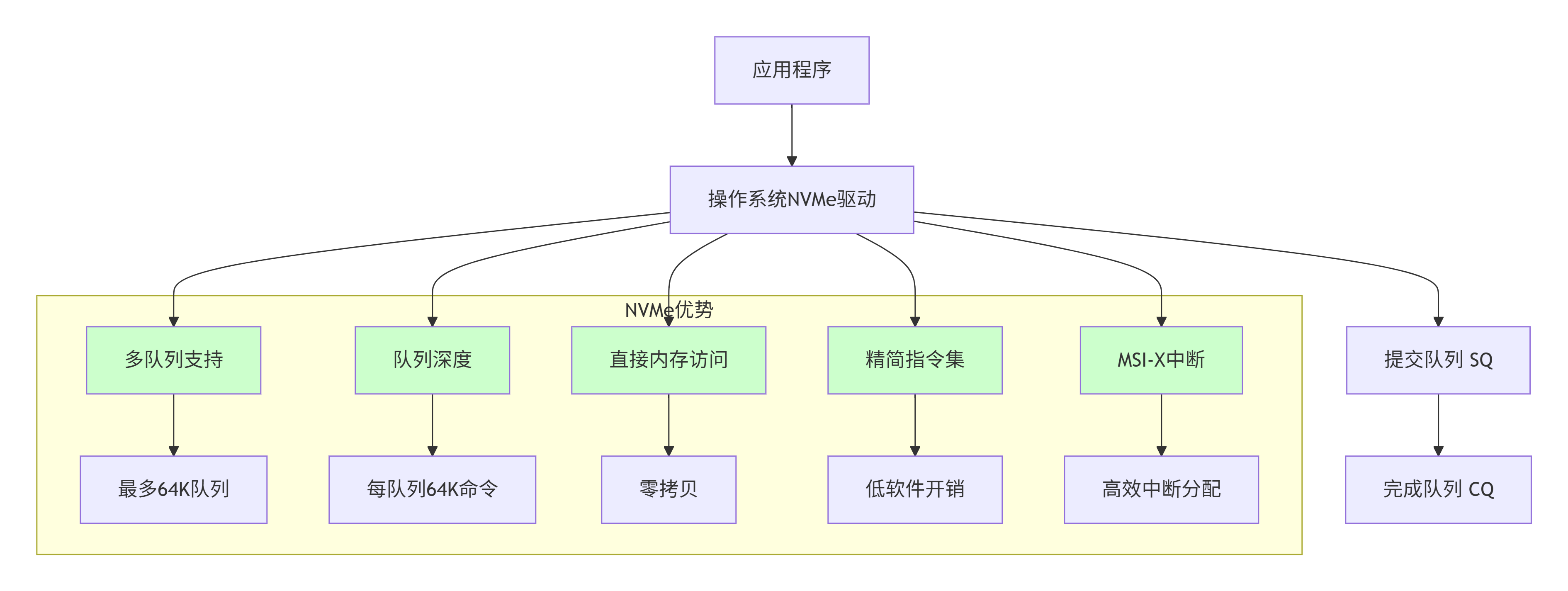
NVMe是为闪存存储和现代多核处理器从头设计的协议,直接运行在PCIe总线上。
NVMe的架构优势:
-
并行队列架构:支持最多64,000个I/O队列,每个队列深度64,000。
-
优化的提交机制:通过门铃寄存器实现高效的命令提交。
-
零拷贝技术:支持端到端的数据保护,无需中间缓冲。
-
高效中断处理:使用MSI-X中断,支持中断亲和性,减少CPU开销。
-
原子操作:原生支持原子写入,简化了数据库等应用的实现。
14.2 性能瓶颈分析:为什么NVMe更快?
性能差异不仅来自接口带宽,更来自协议开销和架构效率。
14.2.1 延迟对比
| 操作阶段 | SATA/AHCI延迟 | NVMe延迟 | 差异原因 |
|---|---|---|---|
| 命令提交 | ~2.5μs | ~0.5μs | NVMe使用门铃寄存器,AHCI需要内存映射访问 |
| 中断处理 | ~5-10μs | ~1-2μs | MSI-X vs. 传统中断 |
| 软件开销 | ~6μs | ~1.5μs | 精简的协议栈 |
| 总延迟 | ~13.5-18.5μs | ~3-4μs | NVMe快4-6倍 |
14.2.2 IOPS性能对比
14.2.3 带宽对比
-
SATA 3.0:理论最大600 MB/s(实际约550 MB/s)
-
NVMe(PCIe 3.0 x4):理论最大4 GB/s(实际约3.5 GB/s)
-
NVMe(PCIe 4.0 x4):理论最大8 GB/s
-
NVMe(PCIe 5.0 x4):理论最大16 GB/s
14.2.4 CPU效率对比
在相同工作负载下:
-
SATA/AHCI可能占用20-30%的CPU资源用于I/O处理。
-
NVMe通常只占用5-10%的CPU资源。
-
对于数据中心,这意味着更高的能效和更低的总体拥有成本。
14.3 SATA与NVMe全方位对比
| 特性维度 | SATA | NVMe | 影响分析 |
|---|---|---|---|
| 最大带宽 | 600 MB/s | 16 GB/s(PCIe 5.0) | NVMe适合数据密集型应用 |
| 接口延迟 | 15-20μs | 3-5μs | NVMe对延迟敏感应用更优 |
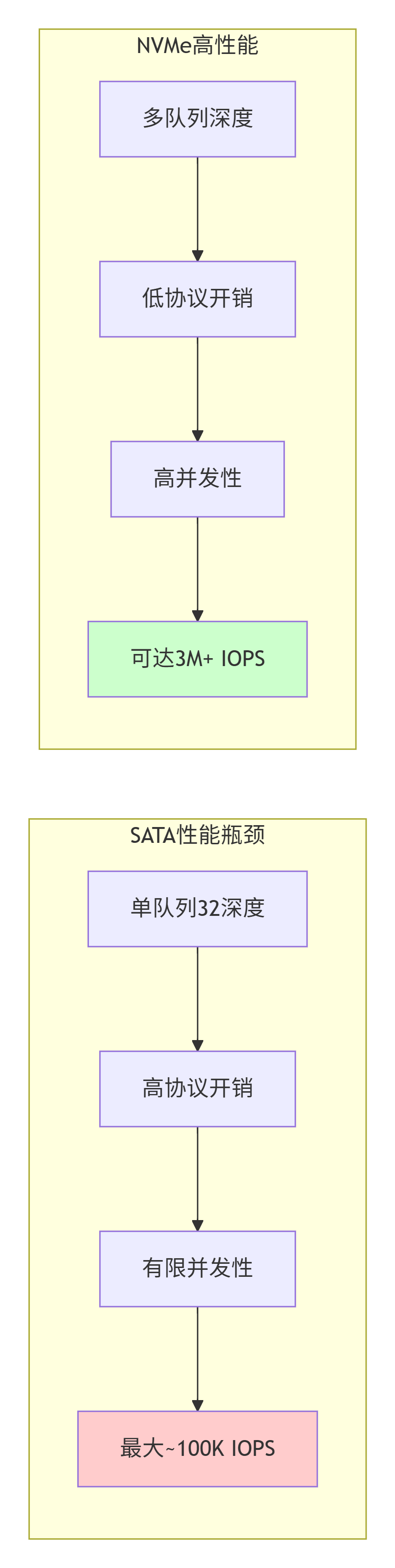
| 最大IOPS | ~100,000 | ~3,000,000+ | NVMe适合高并发工作负载 |
| 队列架构 | 单队列,深度32 | 64K队列,每队列深度64K | NVMe支持更好的并行性 |
| CPU开销 | 高 | 低 | NVMe释放CPU用于业务计算 |
| 连接方式 | 专用线缆 | PCIe插槽/M.2 | NVMe节省空间,简化设计 |
| 热插拔 | 原生支持 | 有限支持 | SATA在服务器环境中更有优势 |
| 成本 | 低 | 中到高 | SATA在成本敏感场景有优势 |
| 兼容性 | 广泛支持 | 需要现代系统 | SATA部署更简单 |
| 供电要求 | 复杂(多电压) | 简单(3.3V) | NVMe设计更简洁 |
| 传输协议 | AHCI over SATA | NVMe over PCIe | NVMe协议更现代高效 |
14.4 SATA的定位与未来:在NVMe时代的价值
尽管NVMe在性能上全面领先,但SATA在未来相当长的时间内仍将扮演重要角色。
14.4.1 SATA的持续价值
-
成本效益:
-
对于大多数日常计算和存储归档需求,SATA SSD提供的性能已经足够。
-
SATA设备和控制器成本显著低于NVMe方案。
-
在容量相同的条件下,SATA SSD的价格通常比NVMe SSD低20-40%。
-
-
大容量存储:
-
SATA接口的2.5英寸和3.5英寸外形规格支持更大的存储容量。
-
对于需要数TB甚至数十TB存储的应用(如媒体库、备份存储),SATA HDD仍然是成本最低的选择。
-
-
兼容性和普及度:
-
几乎所有x86系统都原生支持SATA。
-
庞大的现有设备基础保证了长期的维护和支持需求。
-
外部存储 enclosures、NAS设备普遍使用SATA接口。
-
-
特定应用场景:
-
温数据存储:不需要极致性能但需要快速访问的数据。
-
备份和归档:成本敏感的大容量存储。
-
嵌入式系统:空间和功耗限制较小的应用。
-
二级存储:作为NVMe系统的高速缓存或备份。
-
14.4.2 技术演进路径
SATA协议仍在持续演进,尽管速度放缓:
-
SATA-IO的路线图:专注于维护和优化,而非大幅提升性能。
-
功能增强:改善电源管理、可靠性和管理功能。
-
生态系统维护:确保与新旧设备的兼容性。
14.4.3 混合存储架构的未来
未来的存储系统很可能是分层的混合架构:
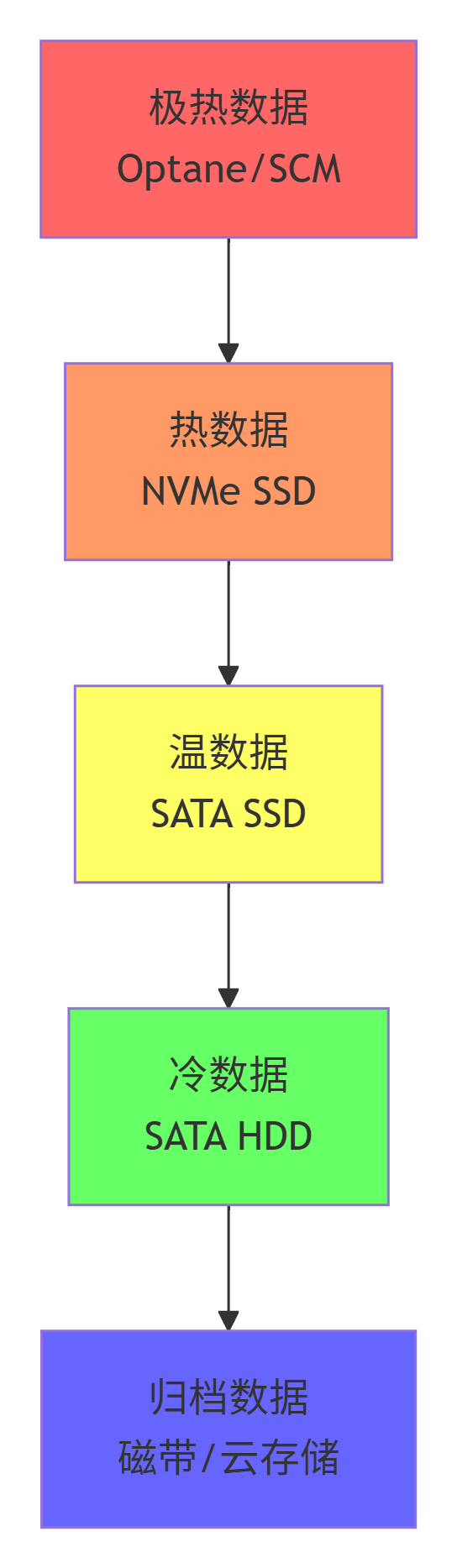
在这种架构中,SATA设备承担着温数据存储和大容量冷存储的关键角色。
14.4.4 市场趋势分析
-
消费级市场:NVMe正在成为高性能系统的主流选择,SATA专注于主流和入门级市场。
-
企业级市场:NVMe用于高性能工作负载,SATA用于大容量和归档存储。
-
数据中心:NVMe over Fabrics用于核心业务,SATA用于二级存储和备份。
-
边缘计算:根据性能需求和成本约束混合使用两种技术。
14.5 SATA与NVMe的协同发展
值得注意的是,SATA和NVMe并非完全对立的技术,它们在某些方面正在协同发展:
-
NVMe-SSD兼容SATA接口:一些消费级NVMe SSD通过转接芯片提供SATA接口兼容性。
-
双模式控制器:一些存储控制器同时支持SATA和NVMe设备。
-
协议转换:SATA Express和U.2等接口尝试桥接两个世界。
-
统一驱动架构:现代操作系统提供统一的存储驱动框架,同时优化两种接口。
14.6 对开发者和IT专业人员的建议
技术选型考虑因素:
-
性能需求:延迟敏感或高IOPS应用选择NVMe。
-
容量需求:大容量存储需求优先考虑SATA。
-
预算限制:成本敏感项目SATA提供更好的性价比。
-
系统兼容性:老旧系统可能只支持SATA。
-
功耗考虑:移动设备可能优先考虑能效比。
-
未来发展:新项目应考虑NVMe的长期优势。
技能发展建议:
-
理解两种技术:掌握SATA和NVMe的底层原理和优化技巧。
-
混合架构设计:学习如何设计分层的存储解决方案。
-
性能分析:掌握两种接口的性能分析和调优方法。
-
迁移策略:了解从SATA到NVMe的迁移路径和最佳实践。
本章小结
本章我们深入比较了SATA与NVMe两种存储技术:
-
我们揭示了架构根源的差异:SATA基于为机械硬盘设计的AHCI,而NVMe是为闪存和现代系统从头设计的。
-
我们分析了性能差距的具体表现和根本原因,NVMe在延迟、IOPS、带宽和CPU效率方面全面领先。
-
我们通过全方位对比表格清晰地展示了两者在各个维度的差异。
-
最重要的是,我们客观分析了SATA在NVMe时代的持续价值:成本效益、大容量存储、兼容性和特定应用场景的优势。
-
我们展望了混合存储架构的未来,SATA将在其中扮演温数据和大容量存储的关键角色。
技术演进不是简单的替代,而是生态系统的丰富和分层。正如SSD没有完全取代HDD一样,NVMe也不会完全取代SATA。理解每种技术的适用场景,在正确的地方使用正确的技术,这才是技术专业人员的价值所在。
第15章:总结与存储技术未来展望
在深入探讨了SATA协议的每一个技术细节之后,我们现在站在了一个更高的视角,来回顾这一技术的全貌,并展望存储技术的未来发展。本章将系统性地总结SATA协议的设计哲学和关键技术,并基于当前技术趋势,描绘存储技术未来的可能发展路径。
15.1 SATA协议设计哲学回顾
SATA协议的成功并非偶然,其背后蕴含着深刻的设计智慧,这些设计原则至今仍对存储技术发展具有重要启示。
15.1.1 渐进式演进策略
SATA采用了巧妙的渐进式演进路径,这体现在多个层面:
-
向后兼容:在物理接口革命性变革的同时,保持了与PATA在命令集层面的兼容性,确保了平稳过渡。
-
分层清晰:严格的分层架构使得各层可以独立演进,物理层提速无需改动上层协议。
-
功能可选:大多数高级功能(如NCQ、热插拔)都是可选的,允许不同定位的产品差异化。
15.1.2 实用主义平衡
SATA在多个维度上实现了精妙的平衡:
-
性能与成本:在提供足够性能的同时,严格控制实现成本。
-
复杂度与功能:通过分层设计管理复杂度,同时提供丰富的功能集。
-
标准化与灵活性:严格的标准确保互操作性,同时为厂商优化留出空间。
15.1.3 生态系统思维
SATA的成功很大程度上得益于其对整个生态系统的考虑:
-
从桌面到数据中心:单一协议覆盖从消费级到企业级的广泛应用场景。
-
硬件与软件协同:同时考虑了硬件实现和软件驱动的需求。
-
制造与部署:连接器设计考虑了大规模制造和现场部署的实际需求。
15.2 关键知识点总结
让我们回顾这份十万字文档中涵盖的核心技术要点:
15.2.1 物理层核心机制
-
差分信号:通过一对相位相反的信号实现出色的抗干扰能力。
-
8b/10b编码:解决时钟恢复和直流平衡问题,代价是20%的带宽开销。
-
OOB通信:在链路初始化阶段通过低频脉冲序列建立基本连接。
-
速度协商:自动检测和选择双方支持的最高传输速率。
15.2.2 链路层核心机制
-
原语系统:专用的控制字,实现流量控制、状态管理和错误恢复。
-
帧结构:标准化的数据封装格式,确保可靠传输。
-
CRC校验:强大的错误检测机制,保障数据完整性。
-
状态机设计:精确定义的各种通信状态和转换条件。
15.2.3 传输层核心机制
-
FIS架构:统一的信息结构,承载命令、数据和状态信息。
-
寄存器映射:通过标准化寄存器接口实现设备控制。
-
命令协议:定义完善的命令执行流程和超时处理机制。
15.2.4 高级特性
-
NCQ:通过命令重排序优化机械硬盘性能,提升SSD并行性。
-
热插拔:完整的硬件和软件支持,实现设备在线更换。
-
电源管理:多级功耗状态,平衡性能和能效需求。
-
端口扩展:通过端口 multiplier 和选择器扩展连接能力和可靠性。
15.3 SATA的历史地位与遗产
SATA在存储技术发展史上占据了独特而重要的位置:
15.3.1 技术过渡的桥梁
-
从并行到串行:SATA成功地完成了从并行总线到高速串行接口的技术转型。
-
从机械到固态:虽然为机械硬盘优化,但通过NCQ等特性为SSD提供了足够的性能支撑。
-
从专有到开放:标准化接口打破了存储接口的碎片化局面。
15.3.2 产业影响的深度
-
统一生态系统:创建了庞大的兼容设备生态系统。
-
降低成本:标准化和规模化显著降低了存储解决方案的成本。
-
推动创新:稳定的接口标准让厂商可以专注于存储介质本身的创新。
15.3.3 设计理念的传承
许多SATA的设计理念被后续技术继承和发展:
-
分层架构思想在NVMe中进一步强化。
-
链路训练和协商机制在高速串行接口中成为标准做法。
-
错误恢复和鲁棒性设计成为存储系统的基础要求。
15.4 存储技术未来展望
基于当前技术发展趋势,我们可以描绘存储技术未来的几个重要发展方向:
15.4.1 介质技术的革命性突破

关键技术趋势:
-
3D NAND:堆叠层数持续增加,从目前的200+层向500层以上发展。
-
存储单元:QLC和PLC技术进一步提升存储密度,代价是寿命和性能。
-
新型介质:PCRAM、ReRAM、MRAM等有望在特定场景替代Flash。
-
革命性技术:量子存储、DNA存储等长期技术正在探索中。
15.4.2 接口技术的持续演进
-
NVMe主导:PCIe 5.0/6.0提供更高带宽,NVMe 2.0规范增强功能。
-
CXL崛起:Compute Express Link为内存和存储提供更紧密的集成。
-
光学接口:基于光学的存储接口可能突破电气接口的带宽和距离限制。
-
无线存储:高速无线连接可能改变存储设备的物理连接方式。
15.4.3 架构范式的转变
从设备到服务的转变:
-
存储类内存: blur 内存和存储的界限。
-
分解式存储:计算资源和存储资源独立扩展。
-
云原生存储:为容器化和微服务架构优化的存储方案。
-
AI驱动存储:智能的数据分层、预取和生命周期管理。
15.4.4 可靠性技术的创新
-
端到端数据保护:从应用到底层介质的完整数据完整性保护。
-
自适应ECC:根据介质磨损情况动态调整纠错算法。
-
预测性维护:通过AI分析提前预测和预防故障。
-
自我修复:系统级的自动错误检测和修复能力。
15.5 对技术人员的建议
面对快速发展的存储技术生态,技术人员需要建立系统的学习和发展策略:
15.5.1 知识体系构建
-
基础原理:深入理解存储系统的基本原理,不受具体接口技术限制。
-
协议栈理解:掌握从应用到底层介质的完整技术栈。
-
性能分析:建立系统的性能分析和优化方法论。
-
故障诊断:掌握跨层的故障诊断和调试技能。
15.5.2 技术视野拓展
-
关注介质发展:理解不同存储介质的特点和适用场景。
-
学习新兴接口:掌握NVMe、CXL等新技术的工作原理。
-
了解云存储:熟悉云环境下的存储架构和最佳实践。
-
探索智能存储:学习AI/ML在存储系统中的应用。
15.5.3 实践能力培养
-
基准测试:掌握科学的存储性能测试方法。
-
容量规划:学习基于工作负载的存储容量和性能规划。
-
数据管理:理解数据生命周期管理的最佳实践。
-
灾难恢复:掌握数据保护和灾难恢复的技术方案。
15.6 结语:永恒的价值
在技术快速迭代的时代,我们可能会问:投入大量时间学习SATA这样"传统"的技术是否值得?答案是明确的:绝对值得。
技术知识的多重价值:
-
基础原理的永恒性:虽然具体实现不断变化,但存储系统的基本原理——缓存、队列、调度、错误处理等——具有长期的稳定性。
-
思维模式的训练:通过学习SATA这样的完整协议栈,我们获得的是一种系统化分析复杂技术的思维模式,这种能力可以迁移到任何新技术的学习中。
-
技术演进的洞察:只有理解了过去的技术选择及其背后的权衡,我们才能更好地判断未来技术的发展方向。
-
实际问题的解决:庞大的现有SATA设备基础意味着相关技术在未来很长时间内仍具有实际应用价值。
存储技术的根本使命:
无论技术如何演进,存储系统的根本使命始终不变:安全、可靠、高效地保存和提供数据。SATA协议在实现这一使命的过程中写下了浓墨重彩的一笔,其设计智慧和工程实践将继续影响未来的存储技术发展。
正如计算机科学家Alan Kay所言:"预测未来的最好方法就是创造它。" 通过深入理解像SATA这样的基础技术,我们不仅能够更好地使用当前的技术,更能够为创造未来的技术贡献自己的力量。
附录
附录A:SATA FIS类型完整列表
本附录提供了SATA规范中定义的所有FIS(帧信息结构)类型的完整参考,包括类型代码、名称、方向和详细描述。
| 类型代码 (Hex) | FIS 名称 | 方向 | 长度 (字节) | 描述 |
|---|---|---|---|---|
| 27h | Register - Host to Device | H2D | 20 | 主机向设备发送命令和控制信息 |
| 34h | Register - Device to Host | D2H | 20 | 设备向主机返回状态和错误信息 |
| 39h | DMA Activate | D2H | 4 | 设备发起DMA传输 |
| 41h | DMA Setup - FPDMA | D2H | 28 | 用于NCQ的DMA传输设置 |
| 46h | Data | 双向 | 可变 | 数据传输FIS |
| 58h | BIST Activate | 双向 | 8 | 内建自测试激活 |
| 5Fh | PIO Setup | D2H | 20 | PIO模式数据传输设置 |
| A1h | Set Device Bits | D2H | 8 | 设备异步状态更新 |
详细说明:
1. Register - Host to Device (27h)
-
用途:主机发送ATA命令到设备
-
关键字段:
-
Command Register:ATA命令码
-
Feature Register:命令特性
-
LBA Registers:逻辑块地址
-
Sector Count:扇区数量
-
Device Register:设备选择和LBA模式
-
2. Register - Device to Host (34h)
-
用途:设备状态响应和错误报告
-
关键字段:
-
Status Register:设备状态(BSY, DRDY, DF, DRQ, ERR)
-
Error Register:详细错误代码
-
LBA Registers:当前LBA位置
-
3. DMA Activate (39h)
-
用途:启动DMA数据传输
-
关键字段:
-
Tag (NCQ):命令标签(0-31)
-
4. DMA Setup - FPDMA (41h)
-
用途:NCQ操作的DMA传输设置
-
关键字段:
-
Tag:NCQ命令标签
-
DMA Buffer Offset:DMA缓冲区偏移
-
Transfer Count:传输数量
-
Reserved:保留字段
-
5. Data (46h)
-
用途:传输用户数据
-
特点:
-
长度可变(0-8192字节数据载荷)
-
必须双字对齐
-
可包含多个扇区数据
-
6. BIST Activate (58h)
-
用途:内建自测试控制
-
应用:制造测试和现场诊断
7. PIO Setup (5Fh)
-
用途:PIO模式数据传输准备
-
关键字段:
-
Status Register:设备状态
-
Transfer Count:PIO传输计数
-
8. Set Device Bits (A1h)
-
用途:设备异步状态通知
-
关键特性:
-
无需主机请求即可发送
-
用于NCQ命令完成通知
-
可清除SActive寄存器位
-
附录B:ATA命令集速查表
本附录列出了常用的ATA/ATAPI命令,包括标准命令和扩展命令。
基本ATA命令
| 命令代码 | 命令名称 | 模式 | 描述 |
|---|---|---|---|
| 20h | READ SECTOR(S) | PIO | 28位LBA读取 |
| 21h | READ SECTOR(S) EXT | PIO | 48位LBA读取 |
| 24h | READ SECTOR(S) | PIO | 带重试的读取 |
| 25h | READ DMA EXT | DMA | 48位LBA DMA读取 |
| 30h | WRITE SECTOR(S) | PIO | 28位LBA写入 |
| 31h | WRITE SECTOR(S) EXT | PIO | 48位LBA写入 |
| 35h | WRITE DMA EXT | DMA | 48位LBA DMA写入 |
| C8h | READ DMA | DMA | 28位LBA DMA读取 |
| CAh | WRITE DMA | DMA | 28位LBA DMA写入 |
设备管理和控制命令
| 命令代码 | 命令名称 | 描述 |
|---|---|---|
| 90h | EXECUTE DEVICE DIAGNOSTIC | 设备自检 |
| 91h | INITIALIZE DEVICE PARAMETERS | 初始化设备参数 |
| E0h | STANDBY IMMEDIATE | 立即进入待机状态 |
| E1h | IDLE IMMEDIATE | 立即进入空闲状态 |
| E2h | STANDBY | 定时待机 |
| E3h | IDLE | 定时空闲 |
| E5h | CHECK POWER MODE | 检查电源模式 |
| E6h | SLEEP | 进入睡眠模式 |
高级功能和特性命令
| 命令代码 | 命令名称 | 描述 |
|---|---|---|
| 60h | READ FPDMA QUEUED | NCQ读取 |
| 61h | WRITE FPDMA QUEUED | NCQ写入 |
| B0h | SMART | 自监测、分析和报告技术 |
| B1h | DEVICE CONFIGURATION | 设备配置 |
| C6h | SET MULTIPLE MODE | 设置多扇区模式 |
| EFh | SET FEATURES | 设置特性 |
识别和信息命令
| 命令代码 | 命令名称 | 描述 |
|---|---|---|
| ECh | IDENTIFY DEVICE | 识别ATA设备 |
| A1h | IDENTIFY PACKET DEVICE | 识别ATAPI设备 |
| 42h | READ VERIFY SECTOR(S) EXT | 验证扇区 |
安全特性命令
| 命令代码 | 命令名称 | 描述 |
|---|---|---|
| F1h | SECURITY SET PASSWORD | 设置密码 |
| F2h | SECURITY UNLOCK | 解锁设备 |
| F3h | SECURITY ERASE PREPARE | 安全擦除准备 |
| F4h | SECURITY ERASE UNIT | 安全擦除单元 |
| F5h | SECURITY FREEZE LOCK | 冻结安全设置 |
| F6h | SECURITY DISABLE PASSWORD | 禁用密码 |
附录C:术语表
本附录提供了SATA协议和相关存储技术中重要术语的详细解释。
A
-
AHCI (Advanced Host Controller Interface):高级主机控制器接口,为SATA控制器提供标准化编程接口。
-
ALIGN Primitive:对齐原语,用于链路同步和时钟补偿。
-
ATA (Advanced Technology Attachment):高级技术附件,并行和串行ATA的总称。
B
-
BIST (Built-In Self-Test):内建自测试,设备自我诊断功能。
C
-
COMINIT:设备初始化OOB信号。
-
COMRESET:主机复位OOB信号。
-
COMWAKE:唤醒OOB信号。
-
CRC (Cyclic Redundancy Check):循环冗余校验,错误检测算法。
-
Crossbar Switch:交叉开关,端口 multiplier 中的交换矩阵。
D
-
D2H FIS (Device to Host FIS):设备到主机的帧信息结构。
-
DEVSLP (Device Sleep):设备睡眠,超低功耗状态。
-
DMA (Direct Memory Access):直接内存访问,无需CPU参与的数据传输。
-
DWORD:双字,32位数据单位。
E
-
EOF (End of Frame):帧结束原语。
-
EOFdt (End of Frame Deferred):延迟帧结束原语,用于NCQ。
F
-
FIS (Frame Information Structure):帧信息结构,SATA通信的基本信息单元。
-
FPDMA (First Party DMA):第一方DMA,NCQ使用的DMA机制。
H
-
H2D FIS (Host to Device FIS):主机到设备的帧信息结构。
-
HBA (Host Bus Adapter):主机总线适配器,SATA控制器。
L
-
LBA (Logical Block Addressing):逻辑块寻址,扇区寻址方法。
-
Link Layer:链路层,SATA协议栈的第二层。
N
-
NCQ (Native Command Queuing):原生命令队列,命令重新排序技术。
O
-
OOB (Out-of-Band):带外通信,链路初始化信号。
P
-
PHY (Physical Layer):物理层,SATA协议栈的最底层。
-
PIO (Programmed Input/Output):编程输入输出,CPU参与的数据传输。
-
Port Multiplier:端口复用器,SATA端口扩展设备。
-
Port Selector:端口选择器,提供冗余连接的设备。
-
Primitive:原语,链路层控制字。
R
-
R_IP (Receiver In Progress):接收方正在处理原语。
-
R_OK (Receiver OK):接收方确认原语。
-
R_RDY (Receiver Ready):接收方就绪原语。
S
-
SActive (Serial ATA Active):NCQ活跃命令位图。
-
SATA (Serial ATA):串行ATA,串行存储接口。
-
SATA-IO (Serial ATA International Organization):SATA国际组织。
-
SOF (Start of Frame):帧开始原语。
T
-
Tag:标签,NCQ命令标识符。
-
Transport Layer:传输层,SATA协议栈的第三层。
X
-
X_RDY (Transmitter Ready):发送方就绪原语。
附录D:SATA线缆和连接器规格
数据线缆规格
| 参数 | 规格 |
|---|---|
| 连接器类型 | 7针 "L"型 |
| 线缆长度 | 最大1米 |
| 信号线 | 2对差分对(TX+, TX-, RX+, RX-) |
| 接地线 | 3根 |
| 阻抗 | 100Ω ±10% 差分 |
| 最大速率 | 6 Gb/s |
电源连接器规格
| 引脚 | 功能 | 颜色编码(可选) |
|---|---|---|
| 1-3 | +3.3V | 橙色 |
| 4,5,8,10,12,13,14 | GND | 黑色 |
| 6,7,9 | +5V | 红色 |
| 15 | +12V | 黄色 |
| 11 | 预充电/保留 | - |
机械特性
-
插拔寿命:≥50次插拔
-
保持力:≥35N
-
接触电阻:≤30mΩ
-
绝缘电阻:≥100MΩ
附录E:SATA版本特性对比详细表
| 特性 | SATA 1.0 (Rev 1.x) | SATA 2.0 (Rev 2.x) | SATA 3.0 (Rev 3.x) | SATA 3.2 (Rev 3.2) | SATA 3.4 (Rev 3.4) |
|---|---|---|---|---|---|
| 发布年份 | 2001 | 2004 | 2009 | 2013 | 2018 |
| 理论带宽 | 1.5 Gb/s | 3.0 Gb/s | 6.0 Gb/s | 6.0 Gb/s | 6.0 Gb/s |
| 有效带宽 | 150 MB/s | 300 MB/s | 600 MB/s | 600 MB/s | 600 MB/s |
| 编码方案 | 8b/10b | 8b/10b | 8b/10b | 8b/10b | 8b/10b |
| NCQ支持 | 无 | 有(32深度) | 增强 | 增强 | 增强 |
| 热插拔 | 基础支持 | 完善 | 完善 | 完善 | 完善 |
| 端口 Multiplier | 基础 | 完善 | 完善 | 完善 | 完善 |
| 电源管理 | Partial/Slumber | 增强 | 增强 | DEVSLP | 改进的电源管理 |
| TRIM支持 | 无 | 无 | 有 | 增强 | 增强 |
| 设备休眠 | 无 | 无 | 无 | DEVSLP | 改进的DEVSLP |
| 主要应用 | 桌面存储 | 主流存储 | 高性能存储 | 移动设备 | 所有场景优化 |
附录F:常见问题解答(FAQ)
Q1: SATA和NVMe可以共存吗?
A: 完全可以。现代系统通常同时提供SATA和NVMe接口,SATA用于大容量存储,NVMe用于高性能应用。
Q2: 如何判断SATA链路是否运行在正确速度?
A: 在Windows中可通过设备管理器查看,在Linux中可使用lspci -v或smartctl -i命令,协议分析仪可直接观测链路训练过程。
Q3: SATA线缆长度为什么限制在1米?
A: 这是为了确保信号完整性。超过1米会导致信号衰减和抖动增加,可能引起传输错误。
Q4: NCQ对SSD和HDD的作用相同吗?
A: 作用机制不同。对HDD主要优化寻道路径,对SSD主要提升命令并行度。
Q5: 如何启用SATA热插拔功能?
A: 需要硬件(支持热插拔的控制器和连接器)、BIOS/UEFI设置和操作系统驱动三方面支持。
Q6: SATA端口 multiplier 会影响性能吗?
A: 会。所有下行设备共享上行链路带宽,在多个设备同时活跃时可能出现性能瓶颈。
Q7: CRC错误一定是硬件故障吗?
A: 不一定。可能是线缆问题、连接器污染、信号完整性问题或电磁干扰。
Q8: SATA 3.0设备可以工作在SATA 2.0端口上吗?
A: 可以,但速度会降至SATA 2.0的300 MB/s,这是向后兼容的特性。
Q9: 什么是Staggered Spin-Up?
A: 交错启动,避免多个设备同时启动造成电源过载。
Q10: SATA Express和SATA有什么关系?
A: SATA Express是过渡性标准,允许在SATA样式的连接器上运行PCIe,现已基本被M.2取代。
附录G:参考文献和进一步阅读
官方标准文档
-
Serial ATA International Organization: Serial ATA Revision 3.4 Specification
-
Serial ATA International Organization: Serial ATA Revision 3.0 Specification
-
*INCITS T13: ATA/ATAPI Command Set (ACS)*
-
AHCI Specification, Intel Corporation
推荐书籍
-
Anderson, Don. Serial ATA Storage Technology
-
MindShare, Inc. Serial ATA Architecture
-
Schmidt, F. The SATA Handbook
-
Messmer, H.P. The Indispensable PC Hardware Book
在线资源
-
SATA-IO官方网站:www.sata-io.org
-
T13技术委员会文档
-
OSDev Wiki SATA相关条目
-
Linux内核SATA驱动文档
技术白皮书
-
Understanding SATA Protocol Analysis
-
SATA NCQ and Performance Optimization
-
SATA Power Management Techniques
-
Signal Integrity in High-Speed SATA Systems
工具和软件
-
Serial ATA Protocol Analyzers (各家测试设备厂商)
-
Linux SATA Tools (smartctl, hdparm, etc.)
-
Windows Device Manager and Performance Monitor
-
Manufacturer-specific diagnostic tools