Pybullet环境中搭建一个UR10机械臂带Robotiq夹爪并实现一个简单的抓取任务
准备工作:安装好pybullet,最好新建一个conda环境
由于pybullet中需要自己写关节约束、物体碰撞等基本设置,比较麻烦,博主采取定义类的方法进行设置,部分碰撞参数设置并不是最好的,需要根据任务具体情况来调节(就是调参,能调整到稳定地抓取物体就是一套好的参数,有时候摩擦力设置大也不是好事儿,会出现各种各样的bug)
项目地址: https://github.com/HuailiangMa/Pybullet_UR10_Grasp_Mouse.git
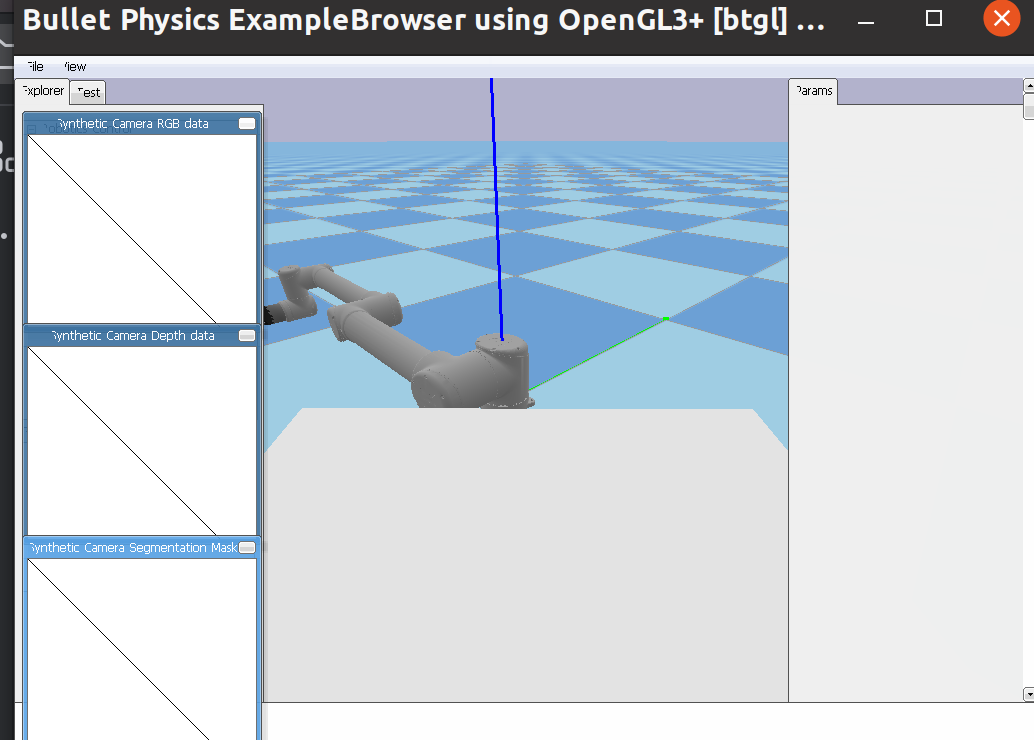
1. 基础仿真环境搭建:加载一个UR10机械臂和一个白色的长方体桌面
主函数定义:
import numpy as np
from ur10_pybullet_sim_env import UR10_Sim_Envdef main():print("Hello world")env = UR10_Sim_Env() # 加载pybullet环境类 包含机器人及夹爪、地面的生成client_id = env.client_id # 获取client_idrobot_info = env.robot_info # 获取robot相关idrobot_id = robot_info["robot_id"]joint_indices = robot_info["joint_indices"]table_position = np.array([0.58, -0.48, 0.14])table_size = np.array([0.4, 0.3, 0.14])table_id = env.load_table(table_position=table_position, table_size=table_size) # 加载桌子table_z = 0.30while True:continueif __name__ == "__main__":main()UR10_Sim_Env() 定义,这里面需要修改urdf的路径,并且urdf是一个整体文件,包含UR10机械臂和Robotiq夹爪和ftsensor传感器,与我的实际实物是完全对应起来的, 其中有一些生成物体的函数,不需要的话可以注释掉:
import pybullet as pb
import pybullet_data as pd
import numpy as np
import timeclass UR10_Sim_Env:def __init__(self):self.client_id = pb.connect(pb.GUI)# self.client_id = pb.connect(pb.DIRECT)self._init_sim()self.robot_info = self._load_robot()self.setup_gripper()self.gripper = GripperController(robot_info=self.robot_info, client_id=self.client_id)self.brush_flag = 0def _init_sim(self):# 加载地面、机器人(附带夹爪)pb.configureDebugVisualizer(pb.COV_ENABLE_SHADOWS, 0)pb.setGravity(0, 0, -9.81)pb.setAdditionalSearchPath(pd.getDataPath())self.plane_id = pb.loadURDF("plane.urdf")pb.changeVisualShape(self.plane_id,linkIndex=-1,rgbaColor=[0.7, 0.9, 1.0, 1.0] # 绿色,alpha=1为不透明)# 调整视角pb.resetDebugVisualizerCamera(cameraDistance=1.0,cameraYaw=45.199737548828125,cameraPitch=-38.19999694824219,cameraTargetPosition=[0.21293649077415466, -0.11691831052303314, 0.03891478106379509])def _load_robot(self):def load_robot_and_get_indices(base_position=(0, 0, 0), base_orientation=(0, 0, 0)):"""加载 UR10 机械臂并解析重要关节索引,可指定朝向。参数:base_position: 机械臂基座位置 (x, y, z)base_orientation: 基座朝向 (roll, pitch, yaw),单位:弧度返回:字典,包含 robot_id 及各关节索引"""urdf_path = "/home/robot/PycharmProjects/ACT_UR10/pybullet/assets/robot.urdf" # 这里替换为你自己的urdf文件位置quat = pb.getQuaternionFromEuler(base_orientation)robot_id = pb.loadURDF(urdf_path,basePosition=base_position,baseOrientation=quat,useFixedBase=True)print("==== 所有关节及其 child_link 名 ====")for i in range(pb.getNumJoints(robot_id)):joint_info = pb.getJointInfo(robot_id, i)print(f"Joint {i} -> link: {joint_info[12].decode()}")# 初始化索引ee_link_index = -1ee_tip_index = -1left_finger_joint_index = -1right_finger_joint_index = -1for i in range(pb.getNumJoints(robot_id)):joint_info = pb.getJointInfo(robot_id, i)name = joint_info[1].decode("utf-8")link_name = joint_info[12].decode("utf-8")if link_name == "wrist_3_link":ee_link_index = iif name == "finger_joint":left_finger_joint_index = iif name == "right_outer_knuckle_joint":right_finger_joint_index = iif name == "dummy_center_fixed_joint":ee_tip_index = iassert ee_link_index != -1, "未找到 wrist_3_link"assert left_finger_joint_index != -1, "未找到 finger_joint"assert right_finger_joint_index != -1, "未找到 right_outer_knuckle_joint"assert ee_tip_index != -1, "未找到 dummy_center_fixed_joint"print(f"末端: {ee_link_index}, 夹爪: {left_finger_joint_index}, {right_finger_joint_index}")joint_indices = [1, 2, 3, 4, 5, 6]return {"robot_id": robot_id,"joint_indices": joint_indices,"ee_link_index": ee_link_index,"ee_tip_index": ee_tip_index,"left_finger_joint_index": left_finger_joint_index,"right_finger_joint_index": right_finger_joint_index}robot_info = load_robot_and_get_indices(base_position=(0, 0, 0),base_orientation=(0, 0, np.pi))return robot_infodef setup_gripper(self):setup_gripper_mimic_constraints_v3(self.robot_info["robot_id"],self.client_id,self.robot_info["left_finger_joint_index"])def load_table(self, table_position=[0.5, -0.5, 0.15], table_size = [0.25, 0.25, 0.11]):return self.load_demo_box(table_position=table_position, table_size=table_size)def load_demo_box(self,table_position,table_size):# === 1. 创建桌子 ===def create_table_box(position=[0.5, -0.5, 0.15],size=[0.4, 0.4, 0.3],rgba=[1.0, 1.0, 1.0, 1.0],mass=0,orientation_euler=(0, 0, 0)):quat = pb.getQuaternionFromEuler(orientation_euler)visual_shape = pb.createVisualShape(shapeType=pb.GEOM_BOX,halfExtents=size,rgbaColor=rgba)collision_shape = pb.createCollisionShape(shapeType=pb.GEOM_BOX,halfExtents=size)table_id = pb.createMultiBody(baseMass=mass,baseCollisionShapeIndex=collision_shape,baseVisualShapeIndex=visual_shape,basePosition=position,baseOrientation=quat)# ✅ 附加刚度和阻尼# Step 4: 设置摩擦力参数pb.changeDynamics(bodyUniqueId=table_id,linkIndex=-1,lateralFriction=0.5,rollingFriction=0.003, # 非0spinningFriction=0.003,contactStiffness=5000,contactDamping=1 # 调大之后物体越倾向于旋转和乱动)return table_idtable_id = create_table_box(table_position,table_size,orientation_euler=(0, 0, np.pi / 4) # 旋转 45°)return table_id# 新版加载物体程序 需要已知重建后的纹理文件和重建后的几何文件def load_cup(self,fixed_obj_path, convex_obj_path, transform_matrix,mass=0.3, lateral_friction = 0.8, scale=[1, 1, 1],baseInertialFramePosition=[0, 0, 0],table_z=0.30,color=[0.7, 0.85, 1.0, 1.0]):return load_object_fixed_and_convex(fixed_obj_path, convex_obj_path, transform_matrix,mass=mass, scale=scale,lateral_friction=lateral_friction,rolling_friction=0.001, spinning_friction=0.001,baseInertialFramePosition=baseInertialFramePosition, table_z=table_z,color=color)# 旧版加载物体程序 需要已知物体的obj格式文件def load_block(self, path, transform_matrix, mass=0.3, lateral_friction = 0.5, scale=[1, 1, 1],baseInertialFramePosition=[0.0, 0.0, 0.0],table_z=0.30):return load_object_vhacd_mesh(path, transform_matrix, mass=mass, lateral_friction = lateral_friction, scale=scale,baseInertialFramePosition=baseInertialFramePosition,table_z=table_z)
urdf文件太长了,我放到我的github上(文件名为:robot.urdf),包含机械臂与夹爪整体的urdf文件(需要与ur10和gripper文件联合使用 记得都下载下来 并保持相对文件结构不变),可以直接使用, 如果你的硬件配置与我相同的话, 需要的话请自取,记得点个星星支持一下hh,我直接把整个环境相关的文件都传上去:
https://github.com/HuailiangMa/Pybullet_UR10_Grasp_Mouse.git
GripperController() 夹爪控制类定义,其中包含了两片夹爪与物体的碰撞检测,用于检测是否抓取成功的函数:
class GripperController:def __init__(self, robot_info: dict, client_id: int, joint_name: str = "finger_joint"):self.robot_id = robot_info["robot_id"]self.client_id = client_idself.joint_name = joint_nameself.joint_index = self._find_joint_index()self.grasp_flag = Falsedef _find_joint_index(self):for i in range(pb.getNumJoints(self.robot_id, physicsClientId=self.client_id)):info = pb.getJointInfo(self.robot_id, i, physicsClientId=self.client_id)if info[1].decode("utf-8") == self.joint_name:return iraise ValueError(f"[ERROR] Joint '{self.joint_name}' not found.")def close(self, target_angle=0.45, force=100000, timeout=3.0): # 以前默认的闭合角度为0.51"""快速控制夹爪闭合,使用高速度/高增益控制器,仍保留初始清除阶段。"""# 1. 清除 VELOCITY 控制pb.setJointMotorControl2(bodyIndex=self.robot_id,jointIndex=self.joint_index,controlMode=pb.VELOCITY_CONTROL,targetVelocity=0.0,force=0.0,physicsClientId=self.client_id)for _ in range(2): # 稳定帧pb.stepSimulation(physicsClientId=self.client_id)# 2. 设置 POSITION 控制pb.setJointMotorControl2(bodyIndex=self.robot_id,jointIndex=self.joint_index,controlMode=pb.POSITION_CONTROL,targetPosition=target_angle,force=force,positionGain=1.0,maxVelocity=1.5,physicsClientId=self.client_id)# 3. 等待收敛或超时t0 = time.time()while time.time() - t0 < timeout:joint_pos = pb.getJointState(self.robot_id, self.joint_index, physicsClientId=self.client_id)[0]if abs(joint_pos - target_angle) < 0.002:return Truepb.stepSimulation(physicsClientId=self.client_id)time.sleep(1 / 2000)print("[WARNING] close_gripper_position 超时未完全闭合")return Falsedef open(self, target_angle=0.14, force=30, timeout=10.0):"""快速稳定地打开夹爪到指定角度,适用于仿真中张开速度加快。"""# 1. 清除可能存在的 VELOCITY 控制(避免抖动)pb.setJointMotorControl2(bodyIndex=self.robot_id,jointIndex=self.joint_index,controlMode=pb.VELOCITY_CONTROL,targetVelocity=0.0,force=0.0,physicsClientId=self.client_id)for _ in range(2):pb.stepSimulation(physicsClientId=self.client_id)# 2. 设置位置控制目标pb.setJointMotorControl2(bodyIndex=self.robot_id,jointIndex=self.joint_index,controlMode=pb.POSITION_CONTROL,targetPosition=target_angle,force=force,positionGain=1.0,maxVelocity=2.0, # 提高张开速度physicsClientId=self.client_id)# 3. 等待达到目标位置或超时t0 = time.time()while time.time() - t0 < timeout:joint_pos = pb.getJointState(self.robot_id, self.joint_index, physicsClientId=self.client_id)[0]if abs(joint_pos - target_angle) < 0.003:# print(f"[INFO] 夹爪已成功张开至 {joint_pos:.4f}")return Truepb.stepSimulation(physicsClientId=self.client_id)time.sleep(1 / 2000)print("[WARNING] 超时未完全张开夹爪")return Falsedef _move(self, target_angle, force, timeout, action):pb.setJointMotorControl2(bodyIndex=self.robot_id,jointIndex=self.joint_index,controlMode=pb.VELOCITY_CONTROL,targetVelocity=0.0,force=0.0,physicsClientId=self.client_id)for _ in range(2):pb.stepSimulation(physicsClientId=self.client_id)pb.setJointMotorControl2(bodyIndex=self.robot_id,jointIndex=self.joint_index,controlMode=pb.POSITION_CONTROL,targetPosition=target_angle,force=force,positionGain=1.0,maxVelocity=2.0 if action == "open" else 1.5,physicsClientId=self.client_id)t0 = time.time()while time.time() - t0 < timeout:joint_pos = pb.getJointState(self.robot_id, self.joint_index, physicsClientId=self.client_id)[0]if abs(joint_pos - target_angle) < 0.003:print(f"[INFO] Gripper {action} done: {joint_pos:.4f}")return Truepb.stepSimulation(physicsClientId=self.client_id)time.sleep(1 / 2000)print(f"[WARNING] Gripper {action} timeout")return Falsedef check_grasp_success(self, block_id, pad_link_indices=[13, 18], depth_thresh=1, contact_thresh=10,extra_push=0.05, force=50):result, contact_count = get_pad_contact_depths(self.robot_id, block_id, pad_link_indices, client_id=self.client_id)print(result)if result[13] is not None or result[18] is not None:# print(1)# print(result[12],result[17],contact_count)if result[13] > depth_thresh or result[18] > depth_thresh:#print(2)#print("[SUCCESS] Grasp detected via contact depth > threshold")self.grasp_flag = Truereturn Trueelse:return Falseelse:return Falsedef check_placement_success(self, ur10_move_ctrl):if ur10_move_ctrl.task_success_flag:all_in_contact = Trueelse:all_in_contact = Falsereturn all_in_contactreturn all_in_contactdef update_gripper(self, ur10_move_ctrl, gripper_cmd, gripper_flag,target_angle=0.60):"""根据 gripper 控制指令更新夹爪状态。参数:env: 仿真环境,需包含 env.grippergripper_cmd_list: 控制指令列表(float 数组)index: 当前轨迹点索引gripper_flag: 当前夹爪状态标志(0=开,1=闭)返回:更新后的 gripper_flag"""ur10_move_ctrl.gripper_cmd = gripper_cmdif gripper_cmd > 0.5 and gripper_flag == 0:self.close(target_angle)return 1elif gripper_cmd < 0.5 and gripper_flag == 1:# pb.changeDynamics(block_id, -1, lateralFriction=0.3, rollingFriction=0.01, spinningFriction=0.01) # 该指令可以动态调整摩擦力self.open()return 0return gripper_flag定义在类外面的夹爪关节约束辅助函数:
夹爪关节运动约束函数,这个函数我经常需要调试,所以放在函数体外面方便查:
def setup_gripper_mimic_constraints_v3(gripper_id, client_id, finger_joint_index):"""给 robotiq gripper 添加 mimic gear 约束,只控制一个 finger_joint,其余关节跟随。适配 UR10 使用。"""def set_gripper_friction(gripper_id, client_id, friction=5.0):for i in range(pb.getNumJoints(gripper_id, physicsClientId=client_id)):joint_info = pb.getJointInfo(gripper_id, i, physicsClientId=client_id)joint_name = joint_info[1].decode("utf-8")# print(joint_name)if "inner_finger_pad" in joint_name or "finger_tip" in joint_name:pb.changeDynamics(gripper_id,i,lateralFriction=0,rollingFriction=0.1,spinningFriction=0.1,physicsClientId=client_id,)# print(f"[INFO] 设置摩擦力: {joint_name} linkIndex={i}")# 1. 获取所有 joint 名称映射name_to_index = {pb.getJointInfo(gripper_id, i, physicsClientId=client_id)[1].decode("utf-8"): ifor i in range(pb.getNumJoints(gripper_id, physicsClientId=client_id))}# 2. 定义 mimic jointsmimic_pairs = {"left_inner_finger_joint": 1,"left_inner_knuckle_joint": -1,"right_outer_knuckle_joint": -1,"right_inner_finger_joint": 1,"right_inner_knuckle_joint": -1,}# 3. 设置 mimic gear constraintfor name, gear in mimic_pairs.items():if name not in name_to_index:print(f"[warn] 未找到 mimic joint: {name}")continuemimic_index = name_to_index[name]c = pb.createConstraint(parentBodyUniqueId=gripper_id,parentLinkIndex=finger_joint_index,childBodyUniqueId=gripper_id,childLinkIndex=mimic_index,jointType=pb.JOINT_GEAR,jointAxis=[0, 0, 1],parentFramePosition=[0, 0, 0],childFramePosition=[0, 0, 0],)pb.changeConstraint(c, gearRatio=gear, erp=0.9, maxForce=5000)# 3.5 设置指尖 pad 的平行运动约束(可选增强)pad_joint_names = ["left_inner_finger_pad_joint","right_inner_finger_pad_joint"]if all(name in name_to_index for name in pad_joint_names):left_pad_index = name_to_index[pad_joint_names[0]]right_pad_index = name_to_index[pad_joint_names[1]]# 添加 gear 约束使得左右指尖平行移动(同步夹紧)c = pb.createConstraint(parentBodyUniqueId=gripper_id,parentLinkIndex=left_pad_index,childBodyUniqueId=gripper_id,childLinkIndex=right_pad_index,jointType=pb.JOINT_GEAR,jointAxis=[1, 1, 1],parentFramePosition=[0, 0, 0],childFramePosition=[0, 0, 0],physicsClientId=client_id,)pb.changeConstraint(c, gearRatio=-1, erp=0.9, maxForce=2000)# 4. 额外连接左右夹爪:主控 -> right_outer_knuckle_jointif "right_outer_knuckle_joint" in name_to_index:c = pb.createConstraint(parentBodyUniqueId=gripper_id,parentLinkIndex=finger_joint_index,childBodyUniqueId=gripper_id,childLinkIndex=name_to_index["right_outer_knuckle_joint"],jointType=pb.JOINT_GEAR,jointAxis=[0, 1, 0],parentFramePosition=[0, 0, 0],childFramePosition=[0, 0, 0],physicsClientId=client_id,)pb.changeConstraint(c, gearRatio=-1, erp=0.9, maxForce=3000)# 5. 设置摩擦力set_gripper_friction(gripper_id, client_id)pb.changeDynamics(bodyUniqueId=gripper_id,linkIndex=18, # 示例,指尖 link indexlateralFriction=1.0,rollingFriction=0.003,spinningFriction=0.003,contactStiffness=10000,contactDamping=1)set_gripper_friction(gripper_id, client_id)pb.changeDynamics(bodyUniqueId=gripper_id,linkIndex=13, # 示例,指尖 link indexlateralFriction=1.0,rollingFriction=0.003,spinningFriction=0.003,contactStiffness=10000,contactDamping=1)加载完是这样的效果:
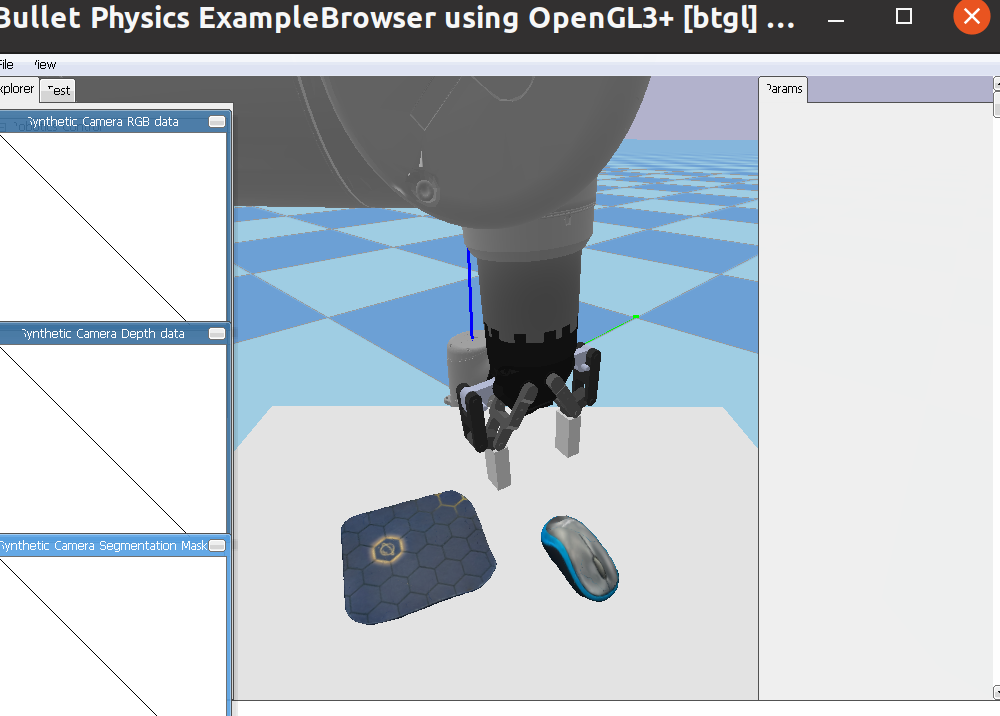
2. UR10机械臂基础控制程序:控制机械臂运动到指定位置和夹爪夹取程序:以抓取鼠标任务为例
(1) 主函数:
import numpy as np
from ur10_pybullet_sim_env import UR10_Sim_Env
from ur10_pybullet_sim_env import UR10_Move_Controller
import os
from scipy.spatial.transform import Rotation as R, Slerp
import pybullet as pb
import time# 相机标定结果
def get_T_base_camera():"""定义并返回相机坐标系到基座坐标系的 4x4 变换矩阵 T_base_camera"""# 替换为新的四元数和位置q_base_camera = [-0.9029638452119679, -0.37028542144547855,0.09033867657688738, 0.19845383447869733] # [x, y, z, w]t_base_camera = np.array([0.8748847230700205, -0.6808723436321604, 0.8521323625643371]) # [x, y, z]# 构造旋转矩阵和平移矩阵R_base_camera = R.from_quat(q_base_camera).as_matrix()T_base_camera = np.eye(4)T_base_camera[:3, :3] = R_base_cameraT_base_camera[:3, 3] = t_base_camerareturn T_base_cameradef read_T_cam_obj_transformation_matrix(filename):""" 从TXT文件读取4x4变换矩阵 """with open(filename, 'r') as file:lines = file.readlines()matrix = np.array([list(map(float, line.strip().split())) for line in lines])return matrixdef get_T_base_obj_from_posefile(pose_path):"""从 pose 文件读取 T_cam_obj,并转换为 T_base_obj。参数:pose_dir (str): 姿态文件所在目录pose_file (str): 姿态文件名返回:np.ndarray: 4x4 的 T_base_obj 变换矩阵"""T_cam_block = read_T_cam_obj_transformation_matrix(pose_path)T_base_cam = get_T_base_camera()T_base_block = T_base_cam @ T_cam_blockreturn T_base_blockdef main():print("Hello world")env = UR10_Sim_Env() # 加载pybullet环境类 包含机器人及夹爪、地面的生成client_id = env.client_id # 获取client_idrobot_info = env.robot_info # 获取robot相关idrobot_id = robot_info["robot_id"]joint_indices = robot_info["joint_indices"]table_position = np.array([0.58, -0.48, 0.14])table_size = np.array([0.4, 0.3, 0.14])table_id = env.load_table(table_position=table_position, table_size=table_size) # 加载桌子table_z = 0.30# 初始化机械臂运动控制器类ur10_move_ctrl = UR10_Move_Controller(robot_info, client_id)## --------该任务是一个简单的抓取-放置任务 先抓取鼠标 之后将鼠标放置在鼠标垫上---------- ### 鼠标的obj文件路径mouse_mesh_path = 'assets/mouse_mesh/untitled.obj' # 鼠标的obj文件 纹理文件obj1_pose_filename = 'assets/mouse_pose.txt' # 鼠标的初始位姿ur10_trajectory1_filename = 'assets/ur10_grasp_mouse_trajectory1.npy' # 设定好的抓取路径ur10_gripper_cmd1 = 'assets/ur10_gripper_cmd1.npy' # 第一段抓取轨迹的夹爪控制指令# 鼠标垫的obj文件路径mouse_pad_mesh_path = 'assets/mouse_pad_mesh/untitled.obj' # 鼠标垫的obj文件 纹理文件obj2_pose_filename = 'assets/mouse_pad_pose.txt' # 鼠标垫的初始位姿ur10_trajectory2_filename = 'assets/ur10_place_mouse_trajectory2.npy' # 设定好的放置路径ur10_gripper_cmd2 = 'assets/ur10_gripper_cmd2.npy' # 第二段放置轨迹的夹爪控制指令# 解包文件 生成物体T_base_obj1 = get_T_base_obj_from_posefile(obj1_pose_filename)T_base_obj2 = get_T_base_obj_from_posefile(obj2_pose_filename)obj1_id = env.load_block(mouse_mesh_path, T_base_obj1, mass=0.1, lateral_friction=10,baseInertialFramePosition=[0.0, 0.0, 0], scale=[0.8, 1.5, 1]) # 该物体的y轴实际上是z轴obj2_id = env.load_block(mouse_pad_mesh_path, T_base_obj2, mass=0, lateral_friction=0.9,baseInertialFramePosition=[0.0, 0.0, 0.0], table_z=0.28) # 该物体的y轴实际上是z轴# 解包机械臂和夹爪控制指令T_base_ee_list1 = np.load(ur10_trajectory1_filename, allow_pickle=True)T_base_ee_list2 = np.load(ur10_trajectory2_filename, allow_pickle=True)gripper_cmd_list1 = np.load(ur10_gripper_cmd1, allow_pickle=True)gripper_cmd_list2 = np.load(ur10_gripper_cmd2, allow_pickle=True)table_position = np.array([0.58, -0.48, 0.14])table_size = np.array([0.4, 0.3, 0.13])obj1_center_base = (0.685, -0.382) # 左半桌子obj2_center_base = (0.514, -0.563) # 右半桌子init_flag = 0 # 状态切换标志位gripper_flag = 0 # 抓取标志位# === 重置仿真环境 ===ur10_move_ctrl.move_init_TopDownGrasp() # 调整到竖直抓取位姿 另一种是水平抓取位姿env.gripper.open()while True:if init_flag == 0:start_pose = T_base_ee_list1[0]move_flag = ur10_move_ctrl.move_cartesian_interpolation(start_pose, steps=30, speed=0.05)init_flag = 1elif init_flag == 1:for i, T_base_ee in enumerate(T_base_ee_list1[1:]):move_flag = ur10_move_ctrl.move_ik(T_base_ee, speed=0.02) # 带初值的数值解法实际并不好用 跟解析解的效果一模一样gripper_cmd = gripper_cmd_list1[i]ur10_move_ctrl.gripper_cmd = gripper_cmd_list1[i]gripper_flag = env.gripper.update_gripper(ur10_move_ctrl,gripper_cmd, gripper_flag)init_flag = 2elif init_flag == 2:start_pose = T_base_ee_list2[0]move_flag = ur10_move_ctrl.move_cartesian_interpolation(start_pose, steps=30, speed=0.05)init_flag = 3elif init_flag == 3:for i, T_base_ee in enumerate(T_base_ee_list2[1:]):move_flag = ur10_move_ctrl.move_ik(T_base_ee, speed=0.05) # 带初值的数值解法实际并不好用 跟解析解的效果一模一样gripper_cmd = gripper_cmd_list2[i]ur10_move_ctrl.gripper_cmd = gripper_cmd_list2[i]gripper_flag = env.gripper.update_gripper(ur10_move_ctrl, gripper_cmd, gripper_flag)init_flag = 4elif init_flag == 4:print(f"[DONE] 轨迹执行完成")pb.removeBody(obj1_id)pb.removeBody(obj2_id)time.sleep(0.005) # 等待物体完全移除init_flag = 5pb.stepSimulation()time.sleep(1 / 240)if __name__ == "__main__":main()(2) 机械臂运动控制类: ur_ik包的函数我已上传至github:
https://github.com/HuailiangMa/Pybullet_UR10_Grasp_Mouse.git
from scipy.spatial.transform import Rotation as R, Slerp
from ur_pkg import ur10_pybullet_inverse as ur_ik
# UR10控制器类 用于状态更新
class UR10_Move_Controller:def __init__(self, robot_info: dict, client_id: int):self.robot_id = robot_info["robot_id"]self.joint_indices = robot_info["joint_indices"]self.ee_link_index = robot_info["ee_link_index"]self.wrist3_link_index = robot_info["ee_link_index"]self.client_id = client_idself.init_joint_angles = [-0.09524376, -1.1650527, -2.21238966, -2.88003804, -0.9131, 0.08560491]self.state_record_flag = False # 开启记录标志位 用于记录机械臂移动过程中的末端位姿和关节角和夹爪指令self.relative_state_record_flag = False # 开启相对位姿变换记录标志位 记录机械臂移动过程中相对位姿和夹爪指令self.state_history = [] # 记录信息的列表self.gripper_cmd = 0.0 # 用于记录机械臂的夹爪控制指令self.gripper_obs = 0.0self.obj_obs_pose = np.zeros(7) # 用于记录七维物体位姿self.ur_obs_pose = np.zeros(7) # 用于记录机械臂末端的七维位姿self.ur_cmd = np.zeros(7) # 用于记录机械臂末端的控制指令self.current_joint_angles = np.zeros(6) # 用于记录当前关节角self.command_joint_angles = np.zeros(6) # 用于记录当前关节角控制指令self.save_sate_filepath = "./dataset_logs"self.save_counter = 0# 另一种保存数据的方式self.T_obj_ee_obs = np.eye(4)self.T_obj_ee_cmd = np.eye(4)self.T_base_obj_obs = np.eye(4)self.T_obj_base = np.eye(4)self.T_obj_base_obs = np.eye(4)self.obj1_id = Noneself.obj2_id = Noneself.T_base_obj1 = np.eye(4)self.T_base_obj2 = np.eye(4)self.T_base_obj3 = np.eye(4)self.T_base_obj4 = np.eye(4)self.collision_obj2_flag = Falseself.obj2_collision_flag = Falseself.task_success_flag = Falsedef get_joint_angles(self):return [pb.getJointState(self.robot_id, i, physicsClientId=self.client_id)[0] for i in self.joint_indices]def move_matrix(self, T_world_tool0, speed=0.01, timeout=3):current_angles = self.get_joint_angles()start_time = time.time()joint_angles = ur_ik.ur10_inverse_matrix(T_world_tool0, current_angles)# === 结束计时 ===elapsed_time = time.time() - start_timeprint(f"[IK] 解算用时: {elapsed_time:.4f} 秒")print("[IK] 结果关节角:", joint_angles)return self.move_joints(joint_angles, speed=speed, timeout=timeout)def move_quat(self,target_position,target_quat,speed=0.02, timeout=3):current_angles = self.get_joint_angles()joint_angles, qsols = ur_ik.ur10_inverse(target_position, target_quat, current_angles)print(joint_angles)joint_angles = [2.09, -1.97, 2.21, -0.25641185442079717, 1.2748560905456543, 0.1050417348742485]return self.move_joints(joint_angles, speed=speed, timeout=timeout),qsolsdef move_init(self,speed=0.01, timeout=3):# joint_angles = [2.09, -1.97, 2.21, -0.25641185442079717, 1.2748560905456543, 0.1050417348742485]joint_angles = [2.2587430477142334, -1.85327655473818, 2.182936191558838, -0.3368290106402796, 1.4757771492004395, 0.0005033374764025211]return self.move_joints(joint_angles, speed=speed, timeout=timeout)def move_init_HorizontalGrasp(self,speed=0.01, timeout=3):# joint_angles = [2.09, -1.97, 2.21, -0.25641185442079717, 1.2748560905456543, 0.1050417348742485]# joint_angles = [2.2587430477142334, -1.85327655473818, 2.182936191558838, -0.3368290106402796, 1.4757771492004395, 0.0005033374764025211]joint_angles = [2.25974989, -2.15307743, 2.08053637, 0.06548142, 1.47576523, 0.00045540]return self.move_joints(joint_angles, speed=speed, timeout=timeout)def move_init_TopDownGrasp(self,speed=0.01, timeout=3):# joint_angles = [2.09, -1.97, 2.21, -0.25641185442079717, 1.2748560905456543, 0.1050417348742485]joint_angles = [2.34667492, -1.51858265, 1.48441792, 1.58592689, 1.57081020, -0.00441009]return self.move_joints(joint_angles, speed=speed, timeout=timeout)def move_my_policy_inverse(self, T_world_tool0, speed=0.01, timeout=3):current_angles = self.get_joint_angles()joint_angles = ur_ik.ur10_my_policy_inverse(T_world_tool0, current_angles)return self.move_joints(joint_angles, speed=speed, timeout=timeout)def get_T_base_ee(self):self.current_joint_angles = np.array(self.get_joint_angles())T_base_ee = ur_ik.ur10_forward_T(self.current_joint_angles)return T_base_eedef get_pos_quat(self):self.current_joint_angles = np.array(self.get_joint_angles())pos,quat = ur_ik.ur10_forward(self.current_joint_angles)return pos,quatdef get_obj1_pose(self):"""获取物体的世界位姿(位置 + 四元数)Returns:tuple:- pos (np.ndarray): 3D 位置 (x, y, z)- quat (np.ndarray): 四元数姿态 (x, y, z, w)"""pos, quat = pb.getBasePositionAndOrientation(self.obj1_id, physicsClientId=self.client_id)return np.array(pos), np.array(quat)def get_T_base_obj1(self):pos = self.T_base_obj1[:3,3]rot = self.T_base_obj1[:2, :3].reshape(6)return pos, rotdef get_T_base_obj2(self):pos = self.T_base_obj2[:3,3]rot = self.T_base_obj2[:2, :3].reshape(6)return pos, rotdef get_T_base_obj3(self):pos = self.T_base_obj3[:3,3]rot = self.T_base_obj3[:2, :3].reshape(6)return pos, rotdef get_T_base_obj4(self):pos = self.T_base_obj4[:3,3]rot = self.T_base_obj4[:2, :3].reshape(6)return pos, rotdef get_obj2_pose(self):"""获取物体的世界位姿(位置 + 四元数)Returns:tuple:- pos (np.ndarray): 3D 位置 (x, y, z)- quat (np.ndarray): 四元数姿态 (x, y, z, w)"""pos, quat = pb.getBasePositionAndOrientation(self.obj2_id, physicsClientId=self.client_id)return np.array(pos), np.array(quat)def move_cartesian_interpolation(self, target_T, steps=30, speed=0.05):current_angles = self.get_joint_angles()current_pos, current_quat = ur_ik.ur10_forward(current_angles)target_pos = target_T[:3, 3]target_quat = R.from_matrix(target_T[:3, :3]).as_quat()# 修正四元数方向一致性,防止插值翻转if np.dot(current_quat, target_quat) < 0:target_quat = -target_quatlast_joint_angles = current_anglesfor i in range(1, steps + 1):alpha = i / stepsinterp_pos = (1 - alpha) * current_pos + alpha * target_posinterp_quat = (1 - alpha) * current_quat + alpha * target_quatinterp_quat /= np.linalg.norm(interp_quat)joint_angles = ur_ik.ur_numerical_ik(fk_func=ur_ik.ur10_forward,target_pos=interp_pos,target_quat=interp_quat,init_joint_angles=last_joint_angles)if joint_angles is None:print(f"[WARN] IK failed at step {i}/{steps}")return Falseself.move_joints(joint_angles, speed=speed)pb.stepSimulation()time.sleep(1 / 240)last_joint_angles = joint_anglesreturn Truedef move_joint_interpolation(self, target_T, steps=50, speed=0.05):"""在关节空间中插值移动到目标末端位姿。仅计算一次逆运动学,并在关节角之间线性插值。"""current_joints = np.array(self.get_joint_angles())# 计算目标关节角(只求一次IK)target_pos = target_T[:3, 3]target_quat = R.from_matrix(target_T[:3, :3]).as_quat()target_joints = ur_ik.ur_numerical_ik(target_pos, target_quat, current_joints, fk_func=ur_ik.ur10_forward)if target_joints is None:print("[ERROR] IK failed for target pose.")return Falsetarget_joints = np.array(target_joints)# 插值执行(可扩展为s型轨迹或带加速度约束的轨迹)for t in range(1, steps + 1):alpha = t / stepsinterp_joints = (1 - alpha) * current_joints + alpha * target_jointsself.move_joints(interp_joints, speed=speed)pb.stepSimulation()time.sleep(1 / 240)return Truedef move_ik(self, T_world_tool0, speed=0.02, timeout=3):current_angles = self.get_joint_angles()# current_angles[3] = -2.5R_mat = T_world_tool0[:3, :3]rot = R.from_matrix(R_mat)target_quat = rot.as_quat() # 四元数格式为 (x, y, z, w)# 提取位置target_pos = T_world_tool0[:3, 3]start_time = time.time()joint_angles = ur_ik.ur_numerical_ik(fk_func=ur_ik.ur10_forward,target_pos=target_pos,target_quat=target_quat,init_joint_angles=current_angles# elbow_preference_axis = elbow_preference_axis,# elbow_weight=1.0 # 可调整为 0.5~2.0,看效果)# === 结束计时 ===elapsed_time = time.time() - start_timereturn self.move_joints(joint_angles, speed=speed, timeout=timeout)def move_ik_analytic_init(self, T_world_tool0, speed=0.02, timeout=3):current_angles = self.get_joint_angles()# current_angles[3] = -2.5R_mat = T_world_tool0[:3, :3]rot = R.from_matrix(R_mat)target_quat = rot.as_quat() # 四元数格式为 (x, y, z, w)# 提取位置target_pos = T_world_tool0[:3, 3]start_time = time.time()joint_angles = ur_ik.ur_numerical_ik_optimized(fk_func=ur_ik.ur10_forward,target_pos=target_pos,target_quat=target_quat,transform_matrix=T_world_tool0,init_joint_angles=current_angles# elbow_preference_axis = elbow_preference_axis,# elbow_weight=1.0 # 可调整为 0.5~2.0,看效果)# === 结束计时 ===elapsed_time = time.time() - start_timeprint(f"[IK] 解算用时: {elapsed_time:.4f} 秒")print("[IK] 结果关节角:", joint_angles)return self.move_joints(joint_angles, speed=speed, timeout=timeout)def move_joints(self, target_joints, speed=0.1, timeout=3, tol=0.001):target_joints = np.array(target_joints)t0 = time.time()while (time.time() - t0) < timeout:current_joints = np.array(self.get_joint_angles())diff = target_joints - current_jointsabs_diff = np.abs(diff)if np.all(abs_diff < tol):for _ in range(10):pb.stepSimulation(physicsClientId=self.client_id)return Trueif np.all(abs_diff < 0.005):pb.setJointMotorControlArray(bodyIndex=self.robot_id,jointIndices=self.joint_indices,controlMode=pb.POSITION_CONTROL,targetPositions=target_joints,positionGains=[1.5] * len(self.joint_indices),forces=[1500] * len(self.joint_indices),physicsClientId=self.client_id)for _ in range(10):pb.stepSimulation(physicsClientId=self.client_id)time.sleep(1 / 1800)return Truefactor = min(1.0, np.max(abs_diff) / (tol * 10))step = diff * speed * factornext_joints = current_joints + steppb.setJointMotorControlArray(bodyIndex=self.robot_id,jointIndices=self.joint_indices,controlMode=pb.POSITION_CONTROL,targetPositions=next_joints,positionGains=[1.2] * len(self.joint_indices),forces=[1000] * len(self.joint_indices),physicsClientId=self.client_id)pb.stepSimulation(physicsClientId=self.client_id)time.sleep(1 / 1800)print("[WARNING] move_joints timeout. Resetting to initial pose...")if hasattr(self, "init_joint_angles"):self.move_joints_once(self.init_joint_angles, speed=0.02)return Falsedef move_joints_once(self, target_joints, speed=0.1):"""仅发送一次目标关节角命令,无反馈控制。"""target_joints = np.array(target_joints)pb.setJointMotorControlArray(bodyIndex=self.robot_id,jointIndices=self.joint_indices,controlMode=pb.POSITION_CONTROL,targetPositions=target_joints,positionGains=[1.2] * len(self.joint_indices),forces=[1000] * len(self.joint_indices),physicsClientId=self.client_id)# 可选地模拟几步让动作生效for _ in range(10):pb.stepSimulation(physicsClientId=self.client_id)time.sleep(1 / 240) # 你也可以写更高的仿真频率,如 1/1800return Truedef solve_ik(self, T, current_pose):R_mat = T[:3, :3]rot = R.from_matrix(R_mat)quat = rot.as_quat() # 四元数格式为 (x, y, z, w)# 提取位置pos = T[:3, 3]joints = pb.calculateInverseKinematics(bodyUniqueId=self.robot_id,endEffectorLinkIndex=self.ee_link_index,targetPosition=pos,targetOrientation=quat,lowerLimits=[-6.283, -6.283, -3.141, -6.283, -6.283, -6.283],upperLimits=[6.283, 6.283, 3.141, 6.283, 6.283, 6.283],jointRanges=[12.566, 12.566, 6.282, 12.566, 12.566, 12.566],restPoses=current_pose,maxNumIterations=100,residualThreshold=1e-5,)joints = np.array(joints, dtype=np.float32)for i in range(len(joints)):if joints[i] > 2 * np.pi:joints[i] -= 2 * np.pielif joints[i] < -2 * np.pi:joints[i] += 2 * np.pireturn jointsdef move_q_solutions(self, T_world_tool0, speed=0.01, timeout=3):current_angles = self.get_joint_angles()current_angles = self.get_joint_angles()current_angles[3] = -100joint_angles, q_sols = ur_ik.ur10_inverse_matrix_test(T_world_tool0, current_angles)return q_solsdef check_motion_collision(self, table_id, obj_id):"""检查机械臂是否与桌面碰撞,如果碰撞则清理传入的 obj_ids 列表:param table_id: 桌子 ID:param obj_ids: 需要清理的物体 ID 列表:return: True 表示发生碰撞并已清理,False 表示无碰撞"""collision_flag = Falseif self.check_collision(table_id):print("[COLLISION] 机械臂与桌面发生碰撞,轨迹判为失败")self.state_history.clear()try:pb.removeBody(obj_id)except Exception as e:print(f"[WARN] 移除物体 {obj_id} 失败: {e}")collision_flag = Trueif self.check_collision(obj_id) and self.task_success_flag == False:self.task_success_flag = Truereturn collision_flagdef check_motion_collision_one_obj(self, table_id, block_id):collision_flag = Falseif self.check_collision(table_id):print("[COLLISION] 机械臂与桌面发生碰撞2,轨迹判为失败")pb.removeBody(block_id)collision_flag = Trueif self.state_record_flag:self.state_history.clear()print('检测到碰撞 清除状态记录')return collision_flagreturn collision_flag(3) 辅助函数:
物体生成函数:
import os
import hashlib
def load_object_vhacd_mesh(path, transform_matrix, mass=0.5, scale=[1, 1, 1],lateral_friction=0.7, rolling_friction=0.001, spinning_friction=0.001, baseInertialFramePosition = [0,0,0],table_z=0.24
):"""优化版:只对每个 mesh 路径运行一次 VHACD,之后复用。"""if mass == 0:transform_matrix[2,3]=table_ztransform_matrix = np.array(transform_matrix).reshape((4, 4))position = transform_matrix[:3, 3].tolist()rotation_matrix = transform_matrix[:3, :3]orientation_quat = R.from_matrix(rotation_matrix).as_quat() # xyzw# === 基于路径构建 VHACD 缓存文件名 ===path_abs = os.path.abspath(path)hash_str = hashlib.md5(path_abs.encode()).hexdigest()[:8]output_dir = os.path.join(os.getcwd(), "vhacd_cache")os.makedirs(output_dir, exist_ok=True)vhacd_output = os.path.join(output_dir, f"{hash_str}_vhacd.obj")log_file = os.path.join(output_dir, f"{hash_str}_vhacd_log.txt")# === 若未生成则执行 VHACD ===if not os.path.exists(vhacd_output):with suppress_stdout_stderr():pb.vhacd(path, vhacd_output, log_file, concavity=1, pca=True)# === 创建视觉形状和碰撞形状 ===visual_shape_id = pb.createVisualShape(shapeType=pb.GEOM_MESH,fileName=path,meshScale=scale,# rgbaColor=[0.7, 0.6, 0.5, 1.0] # 更浅的木色,亮度高一些 [0.6, 0.5, 0.4, 1.0])collision_shape_id = pb.createCollisionShape(shapeType=pb.GEOM_MESH,fileName=vhacd_output,meshScale=scale)# === 创建物体 ===body_id = pb.createMultiBody(baseMass=mass,baseCollisionShapeIndex=collision_shape_id,baseVisualShapeIndex=visual_shape_id,basePosition=position,baseOrientation=orientation_quat.tolist(),baseInertialFramePosition = baseInertialFramePosition)# body_id = pb.createMultiBody(# baseMass=mass,# baseCollisionShapeIndex=collision_shape_id,# baseVisualShapeIndex=visual_shape_id,# basePosition=position,# baseOrientation=orientation_quat.tolist(),# baseInertialFramePosition=baseInertialFramePosition# )## # === 禁用碰撞(可选,确保不参与任何碰撞)===# pb.setCollisionFilterGroupMask(body_id, -1, 0, 0)# === 设置摩擦参数 ===pb.changeDynamics(bodyUniqueId=body_id,linkIndex=-1,lateralFriction=lateral_friction,rollingFriction=rolling_friction,spinningFriction=spinning_friction,contactStiffness=10000,contactDamping=1,)if mass == 0:# 可选:禁用物体响应,保留检测pb.changeDynamics(body_id, -1, contactProcessingThreshold=0)# 可选:开启组过滤(默认 1,1)pb.setCollisionFilterGroupMask(body_id, -1, 1, 1)return body_idimport sys
import contextlib
import os@contextlib.contextmanager
def suppress_stdout_stderr():with open(os.devnull, 'w') as fnull:# 低层文件描述符fd_stdout = sys.stdout.fileno()fd_stderr = sys.stderr.fileno()# 保存原始文件描述符saved_stdout = os.dup(fd_stdout)saved_stderr = os.dup(fd_stderr)try:os.dup2(fnull.fileno(), fd_stdout)os.dup2(fnull.fileno(), fd_stderr)yieldfinally:os.dup2(saved_stdout, fd_stdout)os.dup2(saved_stderr, fd_stderr)os.close(saved_stdout)os.close(saved_stderr)加载完是这样的效果: