20251114 DensePose深度姿势图像处理(简单易用)
目的:
detectron2的densepose代码很全,但是我不需要那么多功能,所以删繁就简
代码库:
https://gitee.com/lushengjie/densepose.git
效果图:
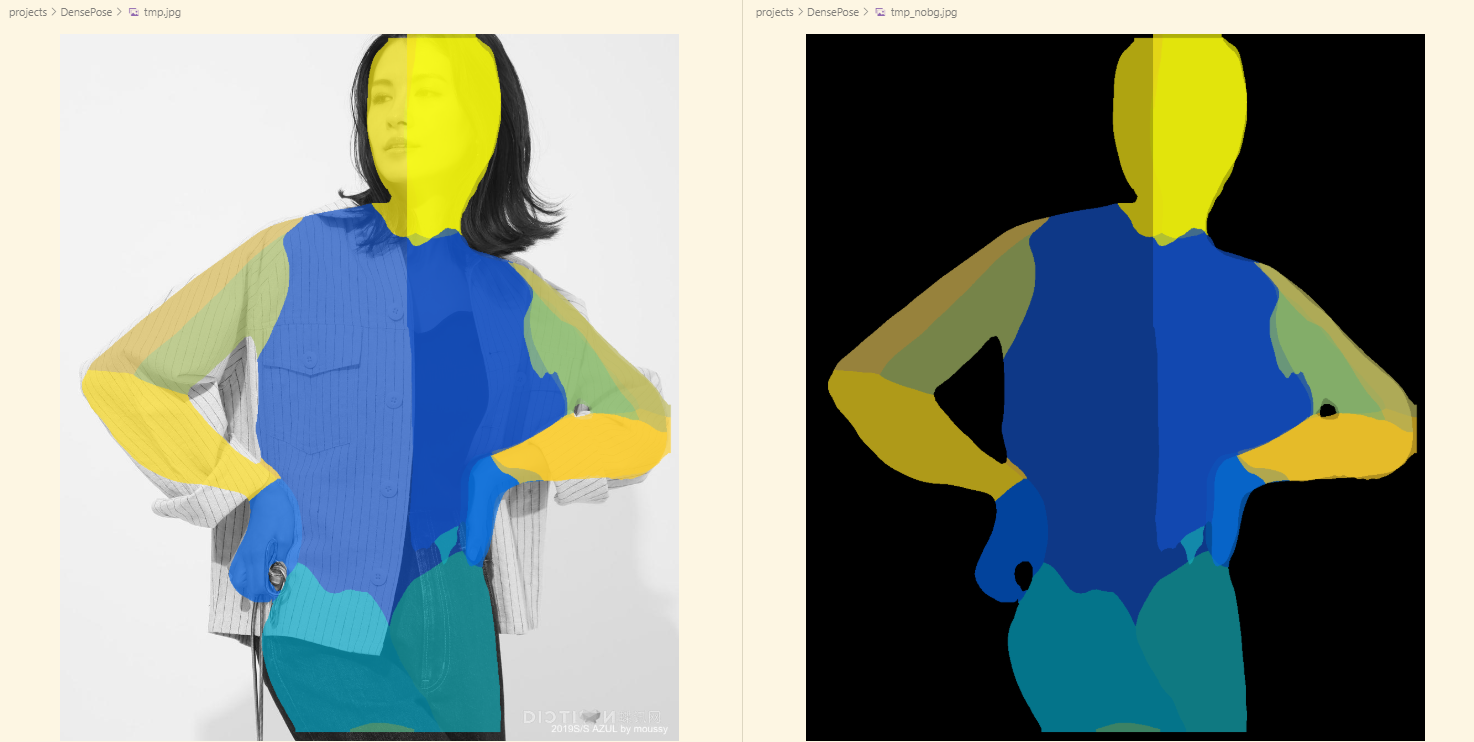
方式:代码调用 或者 flask api调用
简单的代码逻辑(无法直接运行!!,要运行,去代码仓库搭环境!!这里只是看逻辑)
from typing import Any, ClassVar, Dict
import torchfrom detectron2.config import get_cfg
from detectron2.engine.defaults import DefaultPredictorfrom densepose import add_densepose_config
from densepose.vis.base import CompoundVisualizer
from densepose.vis.bounding_box import ScoredBoundingBoxVisualizer
from densepose.vis.densepose_outputs_vertex import (DensePoseOutputsTextureVisualizer,DensePoseOutputsVertexVisualizer,get_texture_atlases,
)
from densepose.vis.densepose_results import (DensePoseResultsContourVisualizer,DensePoseResultsFineSegmentationVisualizer,DensePoseResultsUVisualizer,DensePoseResultsVVisualizer,
)
from densepose.vis.densepose_results_textures import (DensePoseResultsVisualizerWithTexture,get_texture_atlas,
)
from densepose.vis.extractor import (CompoundExtractor,create_extractor,
)VISUALIZERS: ClassVar[Dict[str, object]] = {"dp_contour": DensePoseResultsContourVisualizer,"dp_segm": DensePoseResultsFineSegmentationVisualizer,"dp_u": DensePoseResultsUVisualizer,"dp_v": DensePoseResultsVVisualizer,"dp_iuv_texture": DensePoseResultsVisualizerWithTexture,"dp_cse_texture": DensePoseOutputsTextureVisualizer,"dp_vertex": DensePoseOutputsVertexVisualizer,"bbox": ScoredBoundingBoxVisualizer,
}def get_dp_predictor():config_fpath = 'configs/densepose_rcnn_R_50_FPN_s1x.yaml'model_fpath = 'model_final_162be9.pkl'opts = []cfg = get_cfg()add_densepose_config(cfg)cfg.merge_from_file(config_fpath)cfg.merge_from_list(opts)cfg.MODEL.WEIGHTS = model_fpathcfg.freeze()predictor = DefaultPredictor(cfg)return cfg, predictordef get_outputs_by_predictor(dp_predictor, img_pil):import numpy as npimport cv2img_np = np.array(img_pil)img = cv2.cvtColor(img_np, cv2.COLOR_RGB2BGR)with torch.no_grad():outputs = dp_predictor(img)["instances"]return outputsdef create_context(cfg) -> Dict[str, Any]:visualizers = []extractors = []texture_atlas = get_texture_atlas(None)texture_atlases_dict = get_texture_atlases(None)vis = VISUALIZERS['dp_segm'](cfg=cfg,texture_atlas=texture_atlas,texture_atlases_dict=texture_atlases_dict,)visualizers.append(vis)extractor = create_extractor(vis)extractors.append(extractor)visualizer = CompoundVisualizer(visualizers)extractor = CompoundExtractor(extractors)context = {"extractor": extractor,"visualizer": visualizer,"entry_idx": 0,}return contextdef execute_on_outputs(context: Dict[str, Any], outputs, img_pil,
):import cv2import numpy as npvisualizer = context["visualizer"]extractor = context["extractor"]img_np = np.array(img_pil)image = cv2.cvtColor(img_np, cv2.COLOR_RGB2GRAY)image = np.tile(image[:, :, np.newaxis], [1, 1, 3])bimg = np.zeros_like(image)data = extractor(outputs)image_vis = visualizer.visualize(image, data) # (1280, 1120, 3)bimage_vis = visualizer.visualize(bimg, data)image_vis = cv2.cvtColor(image_vis, cv2.COLOR_BGR2RGB)bimage_vis = cv2.cvtColor(bimage_vis, cv2.COLOR_BGR2RGB)return image_vis, bimage_visdef main():dp_cfg, dp_predictor = get_dp_predictor()from PIL import Imageimg_path = 'image.jpg'img_pil = Image.open(img_path).convert('RGB') dp_outputs = get_outputs_by_predictor(dp_predictor, img_pil)dp_context = create_context(dp_cfg)res_bg_dp, res_nobg_dp = execute_on_outputs(dp_context, dp_outputs, img_pil)res_bg_dp_pil = Image.fromarray(res_bg_dp)res_nobg_dp_pil = Image.fromarray(res_nobg_dp)return res_bg_dp_pil, res_nobg_dp_pilif __name__ == "__main__":main()
5步逻辑,删除源代码库中的无关代码
获得model -> 上下文配置 -> 获得 输出 -> 解析输出 -> 保存结果
flask api也是基于这个完成的