跟踪导论(三)——滤波的释义位置信息的“观测+修正”
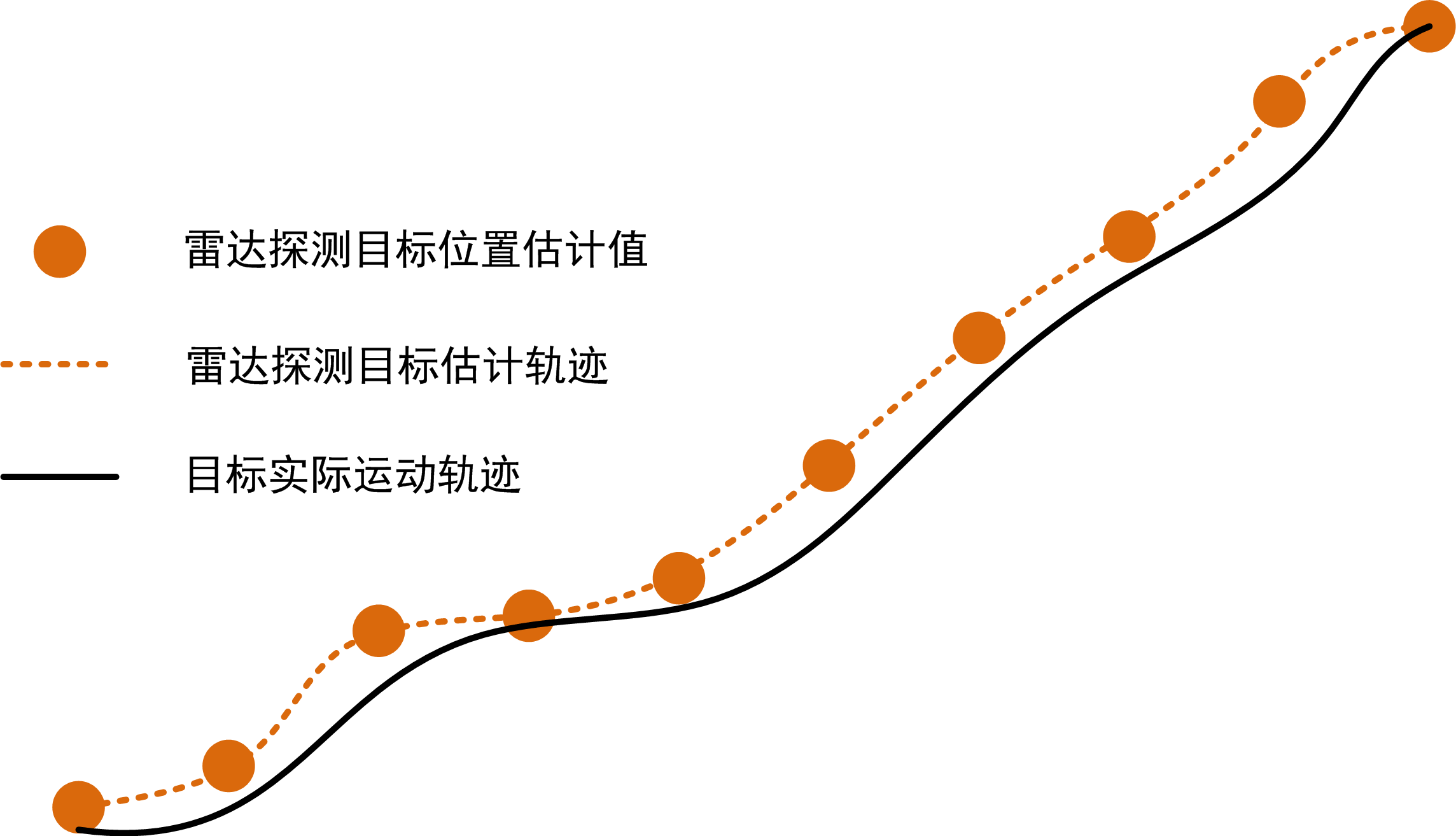
真实的雷达测量均是在噪声存在的情形下去获取探测目标的状态信息(距离、角度、速度),其中距离和角度信息共同构成了当下时刻目标的位置信息,因此雷达探测的目标信息又可精炼成:位置、速度,两类。通常在雷达的实际显控中我们观测到的目标轨迹是一条相对平滑的曲线,如图1所示,然而该曲线却是雷达通过数据滤波处理在滤除部分噪声后获得的一系列合理估计点连接得到曲线,如图2所示。

那么滤波的基本原理是什么呢?为什么滤波后我们的运动曲线就变得光滑了呢?
我们已经知道雷达探测得到的位置观测值z~[n]\tilde z\left[ n \right]z~[n]和速度观测值v~[n]\tilde v\left[ n \right]v~[n]都是在噪声环境下观测得到的,若假设为加性高斯噪声即:
z~[n]=z[n]+wz[n](1)\tilde z\left[ n \right] = z\left[ n \right] + {w_z}\left[ n \right](1)z~[n]=z[n]+wz[n](1)
v~[n]=v[n]+wv[n](2)\tilde v\left[ n \right] = v\left[ n \right] + {w_v}\left[ n \right](2)v~[n]=v[n]+wv[n](2)
其中,z[n]z\left[ n \right]z[n]、v[n]v\left[ n \right]v[n]是目标位置和速度的客观真实值,wz[n]{w_z}\left[ n \right]wz[n]、wv[n]{w_v}\left[ n \right]wv[n]是目标位置和速度的观测噪声。根据贝叶斯估计的基本原理可知,若可以从观测值之外的其他来源获取客观真实值的部分信息,那么就可以讲这部分当作一种修正信息对观测值进行修正,从而得到更接近客观真实值的估计值z^[n]\hat z\left[ n \right]z^[n]、v^[n]\hat v\left[ n \right]v^[n]。
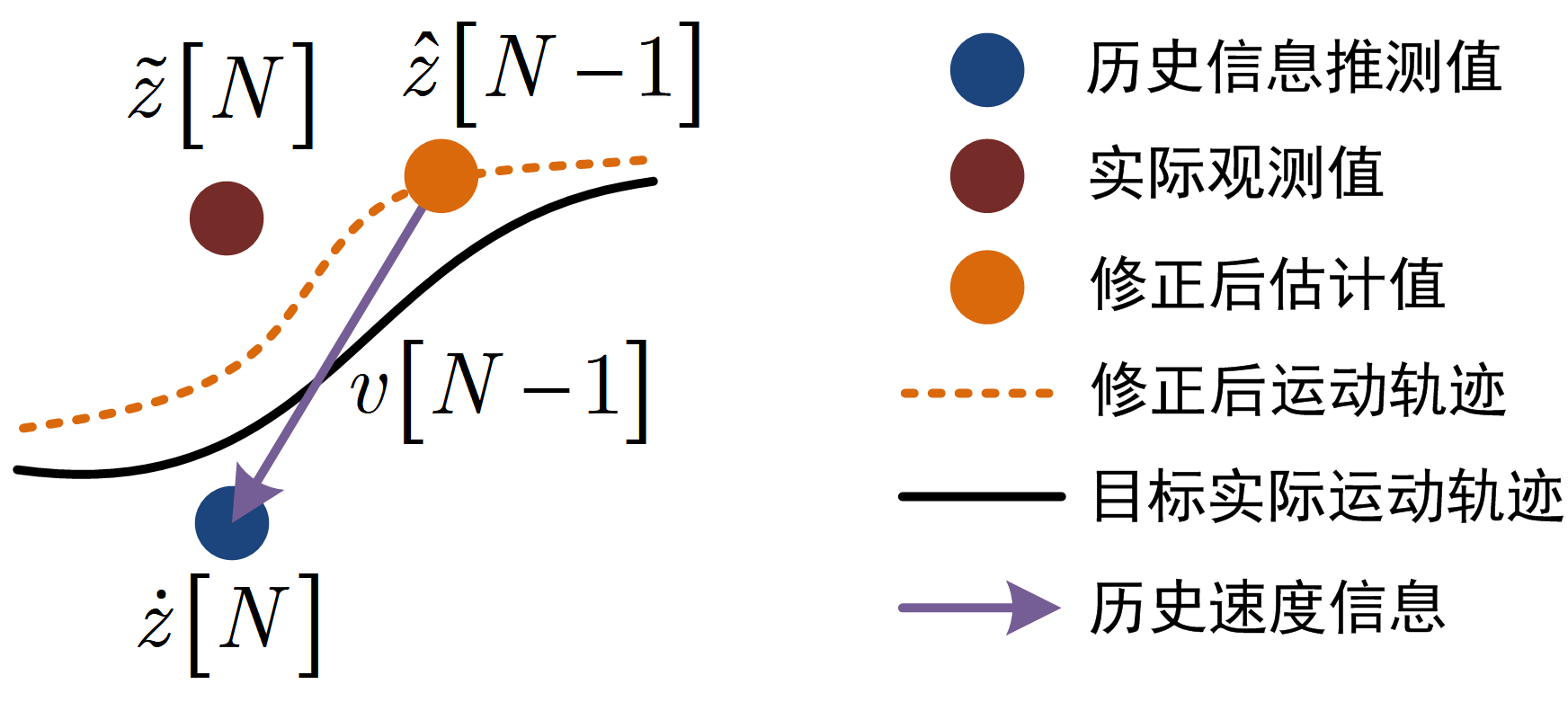
这篇内容主要理解位置信息的修正。在雷达探测场景中,这种修正信息可从历史信息中得到。在雷达探测中,由于我们是对宏观世界的物体进行探测,那么目标的状态肯定在时间前后上具有关联性。具体来讲,目标在当下tN{t_N}tN时刻的位置z[N]z\left[ N \right]z[N]肯定可以通过tN−1{t_{N - 1}}tN−1时刻的位置z[N−1]z\left[ {N - 1} \right]z[N−1]和tN−1{t_{N - 1}}tN−1时刻的速度v[N−1]v\left[ {N - 1} \right]v[N−1]推测得到,如:
z[N]=z[N−1]+v[N−1]⋅(匀速运动)(3)Tz\left[ N \right] = z\left[ {N - 1} \right] + v\left[ {N - 1} \right] \cdot(匀速运动)(3) Tz[N]=z[N−1]+v[N−1]⋅(匀速运动)(3)T
z[N]=z[N−1]+v[N−1]⋅T+12aT2(匀加速运动)(4)z\left[ N \right] = z\left[ {N - 1} \right] + v\left[ {N - 1} \right] \cdot T + {1 \over 2}a{T^2}(匀加速运动)(4)z[N]=z[N−1]+v[N−1]⋅T+21aT2(匀加速运动)(4)
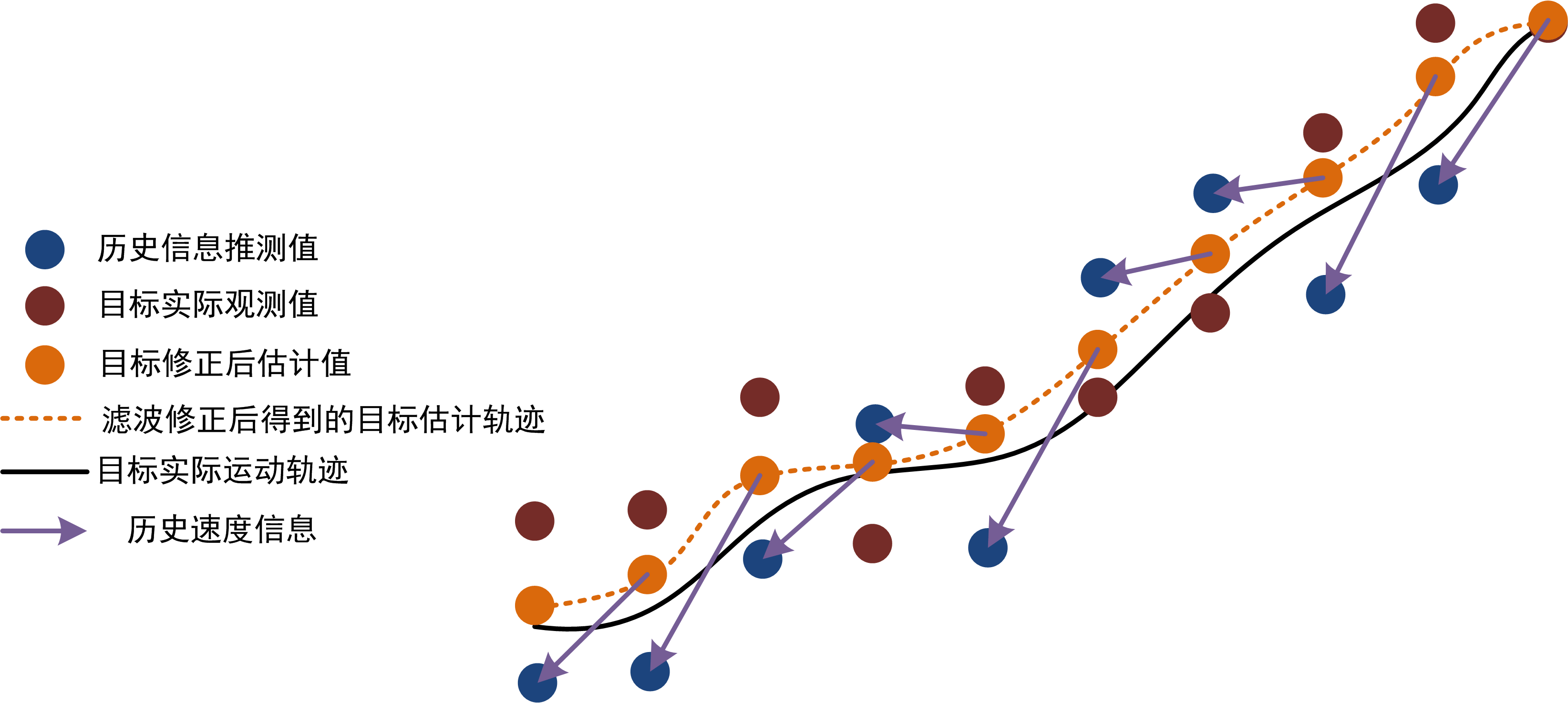
其中TTT是时间采样间隔T=tN−tN−1T = {t_N} - {t_{N - 1}}T=tN−tN−1,aaa是匀加速运动的加速度。即当目标是匀速、匀加速运动或其他速度变化规律已知的变加速运动时,目标当下时刻的位置z[N]z\left[ N \right]z[N]可以由前一时刻的位置z[N−1]z\left[ {N - 1} \right]z[N−1]、速度v[N−1]v\left[ {N - 1} \right]v[N−1]直接计算得到的。实际情况中目标的这种速度变化规律雷达是不知道的,那么目标当下时刻的位置z[N]z\left[ N \right]z[N]无法通过前一时刻的位置z[N−1]z\left[ {N - 1} \right]z[N−1]、速度v[N−1]v\left[ {N - 1} \right]v[N−1]直接计算得到。但是,由于雷达观测的是目标宏观物体,因此我们可以有一个合理的基本假设:目标在任意间隔TTT的两次观测之间的速度变化是渐变的而非突变的。在这个假设之下我们可以认为当观测时间间隔TTT较短时,雷达按照前一时刻位置z^[N−1]\hat z\left[ {N - 1} \right]z^[N−1]、速度v^[N−1]\hat v\left[ {N - 1} \right]v^[N−1]推测得到的当下时刻位置z˙[N]=z^[N−1]+v^[N−1]⋅T\dot z\left[ N \right] = \hat z\left[ {N - 1} \right] + \hat v\left[ {N - 1} \right] \cdot Tz˙[N]=z^[N−1]+v^[N−1]⋅T总是在客观真实位置z[N]z\left[ N \right]z[N]附近的。如图3所示。由此,雷达就获得了关于目标客观真实位置z[N]z\left[ N \right]z[N]的两个相关值,一个是当下时刻的观测值z~[N]\tilde z\left[ N \right]z~[N]、一个是由之前的历史信息得到的推测值z˙[N]\dot z\left[ N \right]z˙[N],两个相关值同时指向客观真实值z[N]z\left[ N \right]z[N],且来自不同的信息来源。那么我们就可以通过用推测值z˙[N]\dot z\left[ N \right]z˙[N]修正观测值z~[N]\tilde z\left[ N \right]z~[N]的方法来获得更加接近客观真实值z[N]z\left[ N \right]z[N]的估计值z^[N]\hat z\left[ N \right]z^[N],如图4所示。综合考虑这个过程,由于我们估计得到的值z^[N]\hat z\left[ N \right]z^[N]考虑了由之前历史信息得到的推测值z˙[N]\dot z\left[ N \right]z˙[N],因此得到的目标运动轨迹z^[n]\hat z\left[ n \right]z^[n]总是随时间渐变的、平滑的,而非突变的。