8、hall速度控制——速度电流双闭环控制(一)
1、hall速度与电角度测量
1.1hall状态
hall安装方式
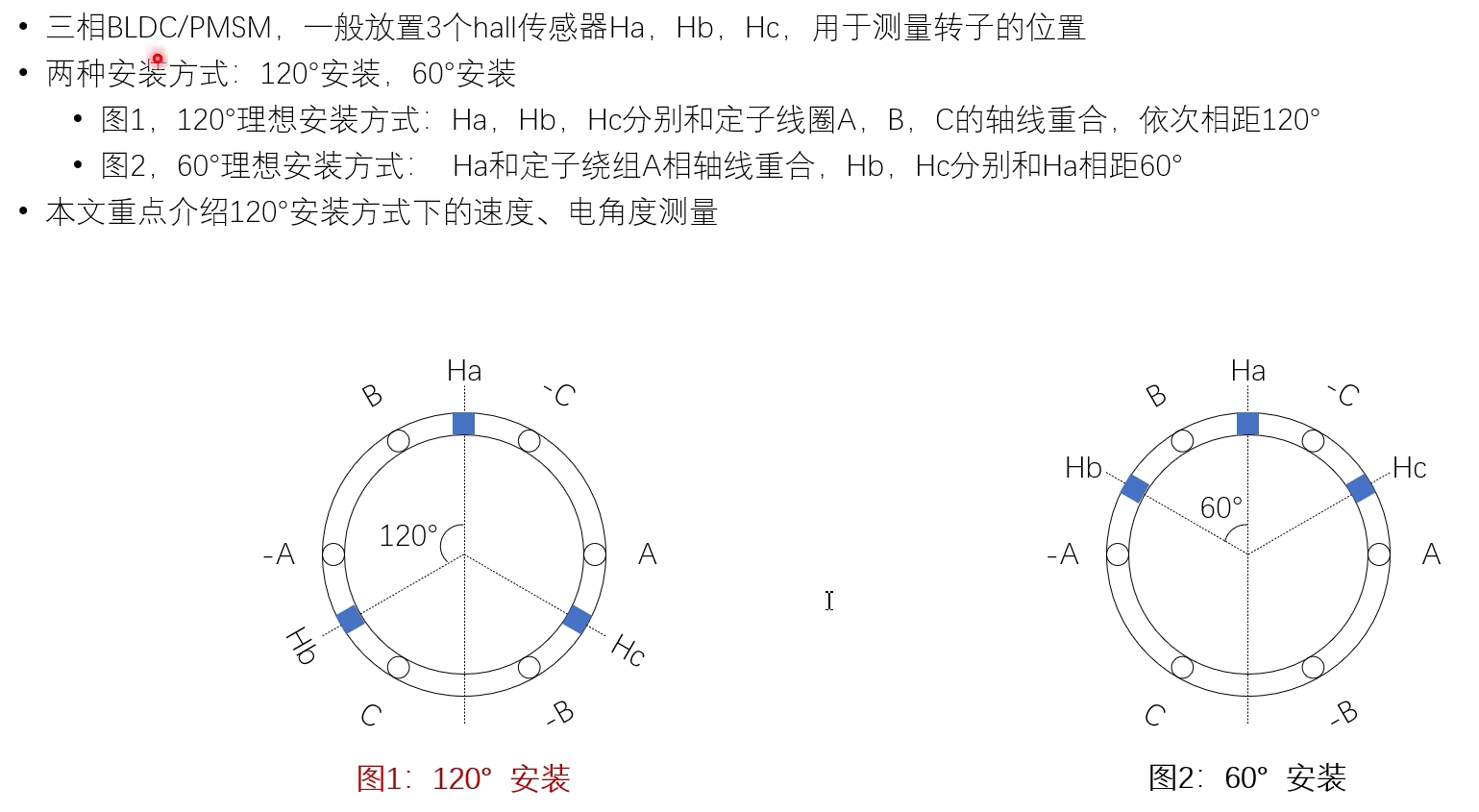
hall状态
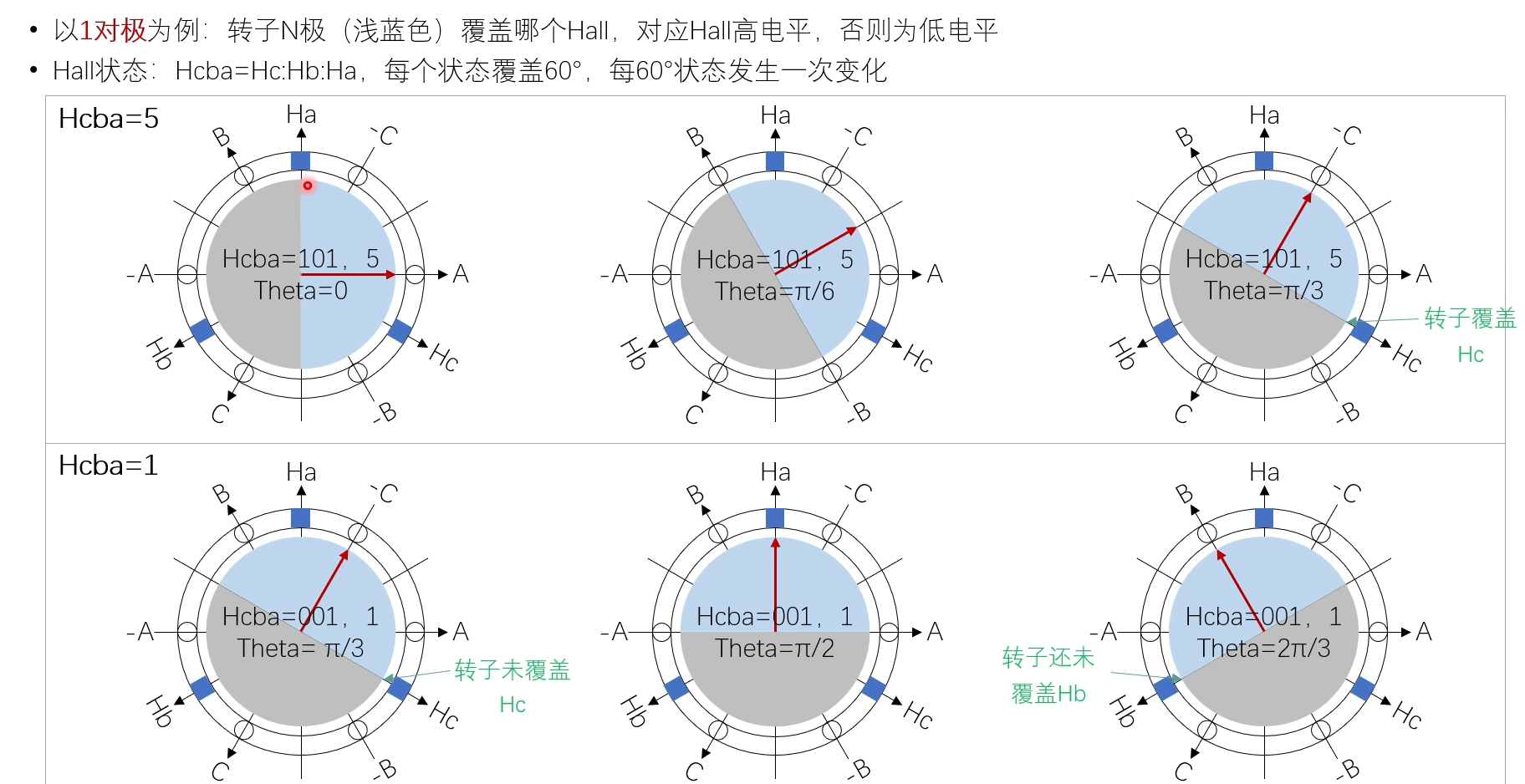
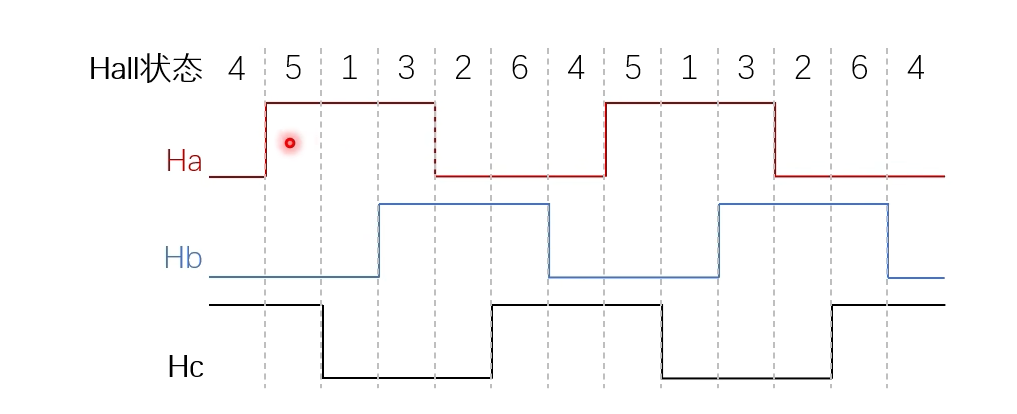
状态5,转子从刚刚覆盖HA开始,到转子即将离开HC为止;在这个过程中转子始终覆盖着HA和HC;它的状态就等于101;转子的角度从0°到60°;
状态1,转子从刚刚离开HC开始,到转子即将覆盖HB为止;这个过程中转子仅仅覆盖着HA;它的状态就等于001;转子从60°到120°;
总结就是每个状态覆盖60°,每60°状态变化一次;
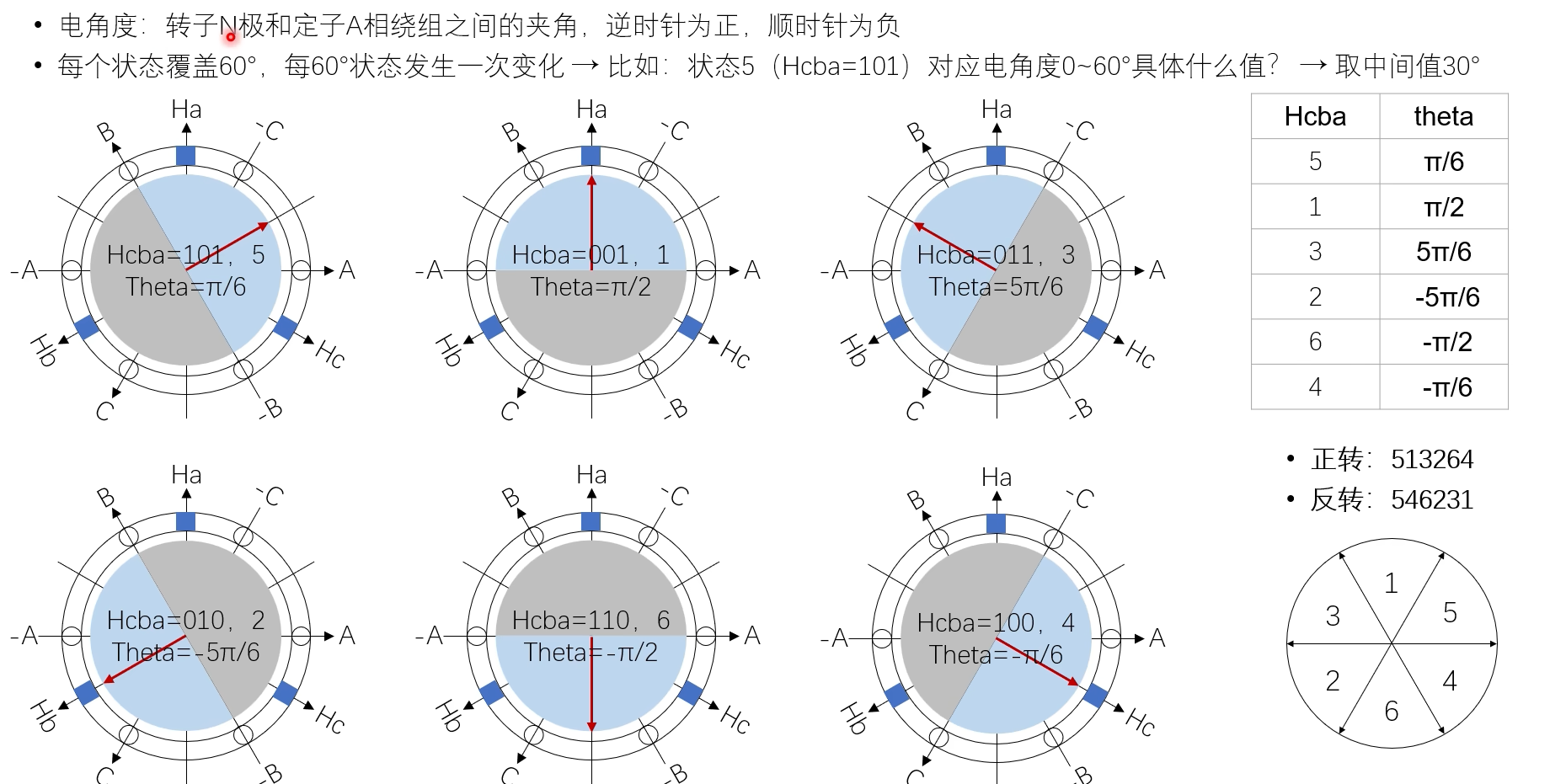
Hall状态与电角度关系
转子的N极(id),A相绕组(α轴)
正转:30°->90°->150°->-150°->-90°->-30°
Hall状态波形图
正转:
5 1 3 2 6 4
101 001 011 010 110 100
HCHBHA
1.2hall相位偏移
hall超前安装即图2所示,转子N极会更早的覆盖HA;
hall滞后安装即如图3所示,转子N极会更晚的覆盖HA;
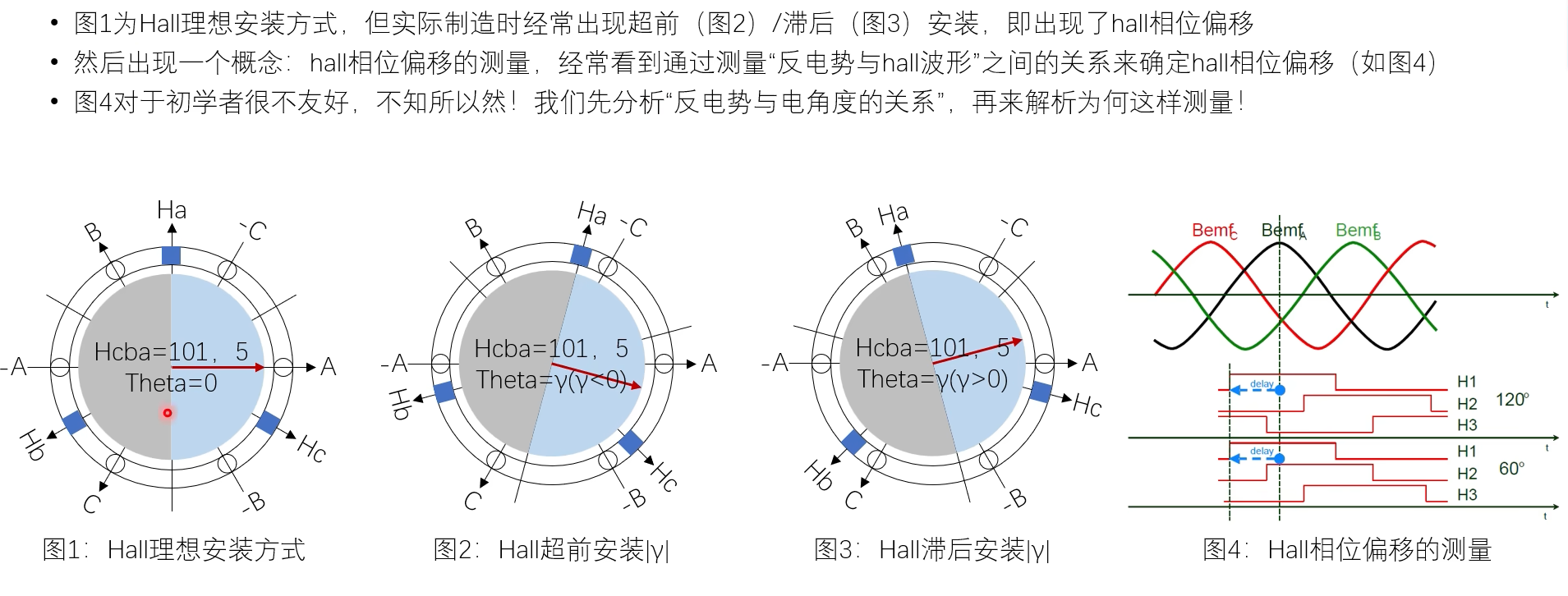
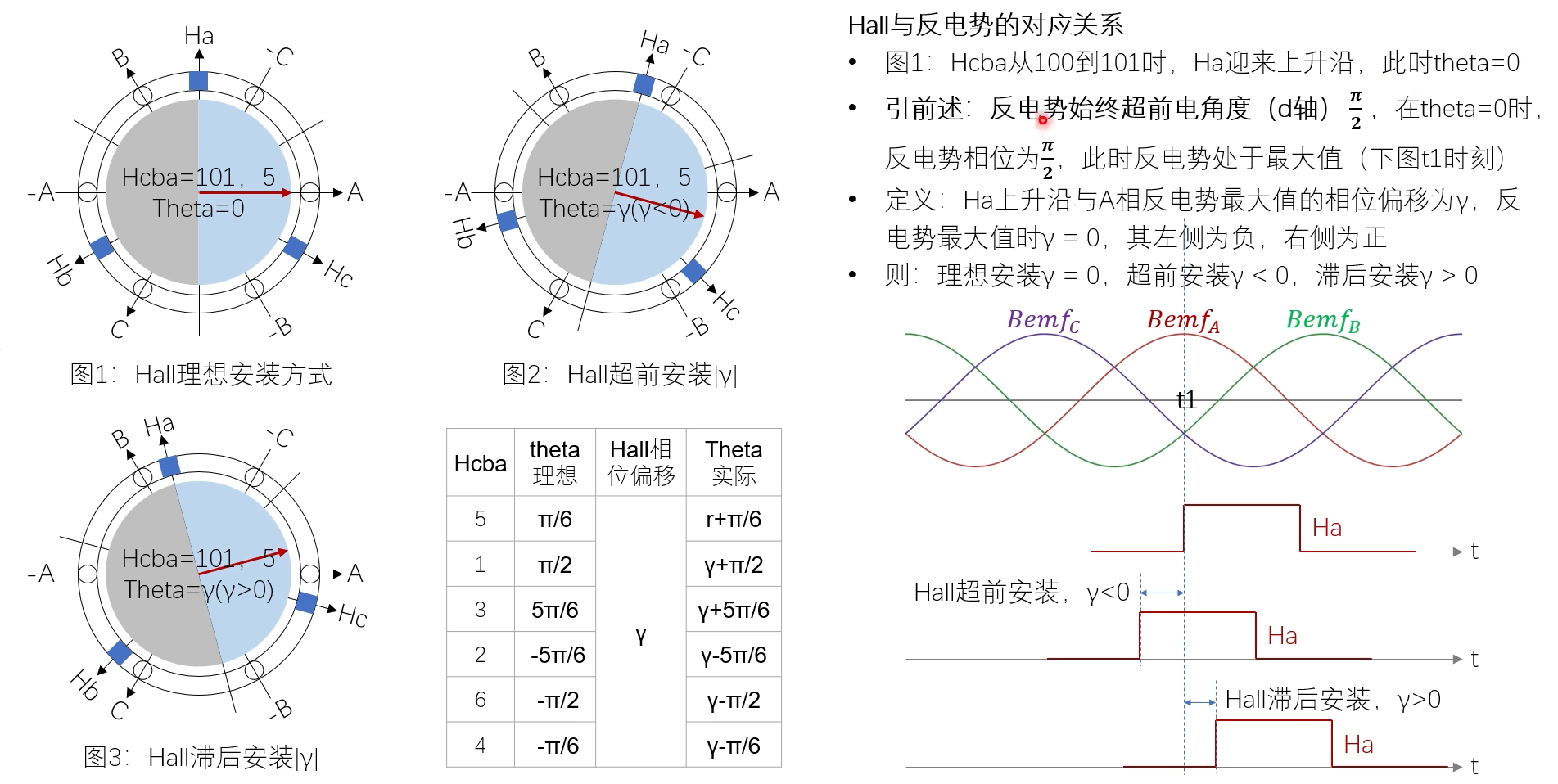
hall传感器理想安装时,Ha的上升沿就对应A项反电动势的最大值;
hall超前安装时,例如超前15°,这时电角度等于-15°,反电势始终超前电角度90°(不随HALL安装误差改变),这时反电势的相位就是75°,对应的非最大相位;
对于hall安装误差,可以通过测量HA的上升沿和A相反电势最大值之间的相位差来确定
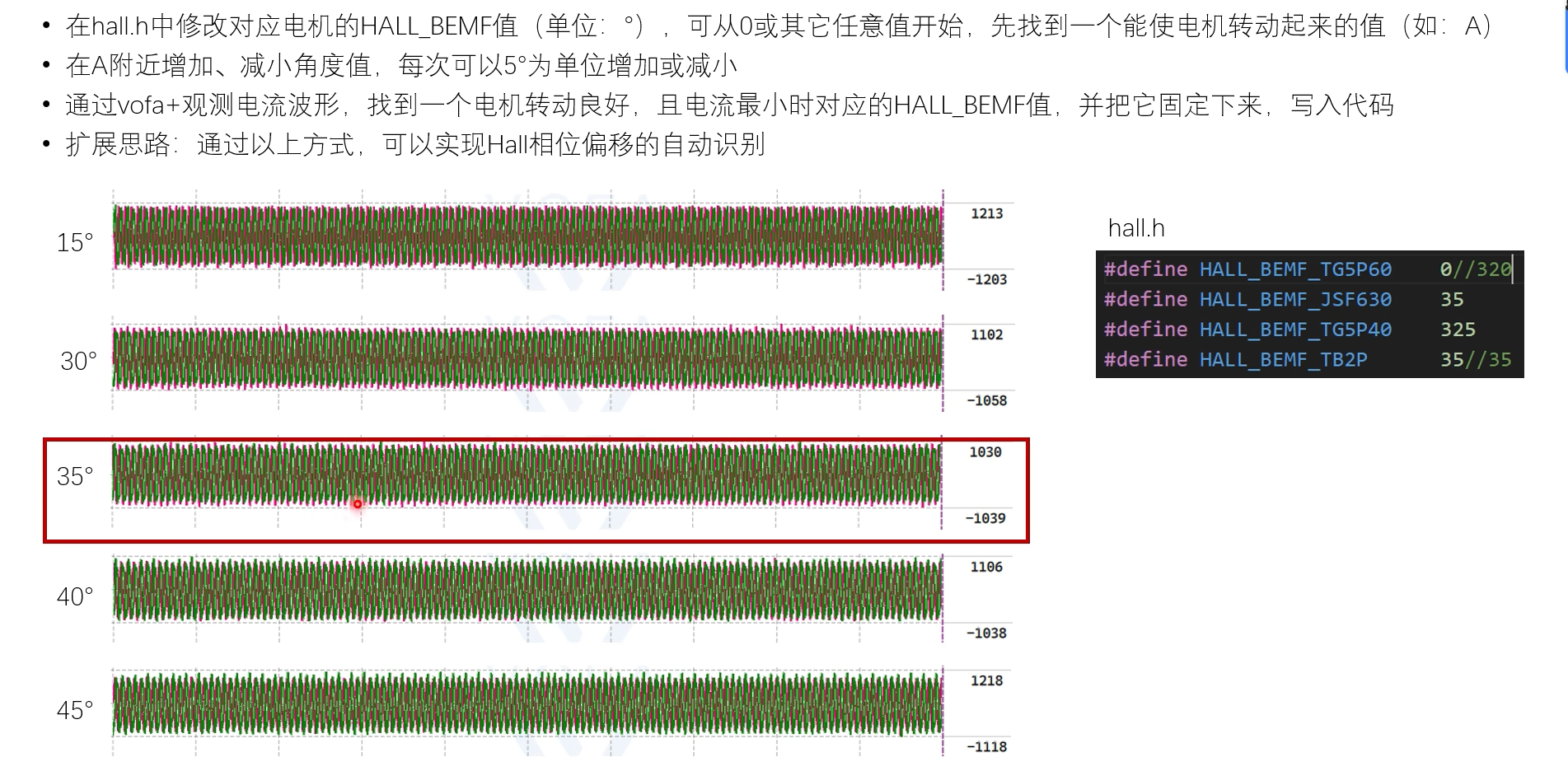
hall相位偏移测量方法
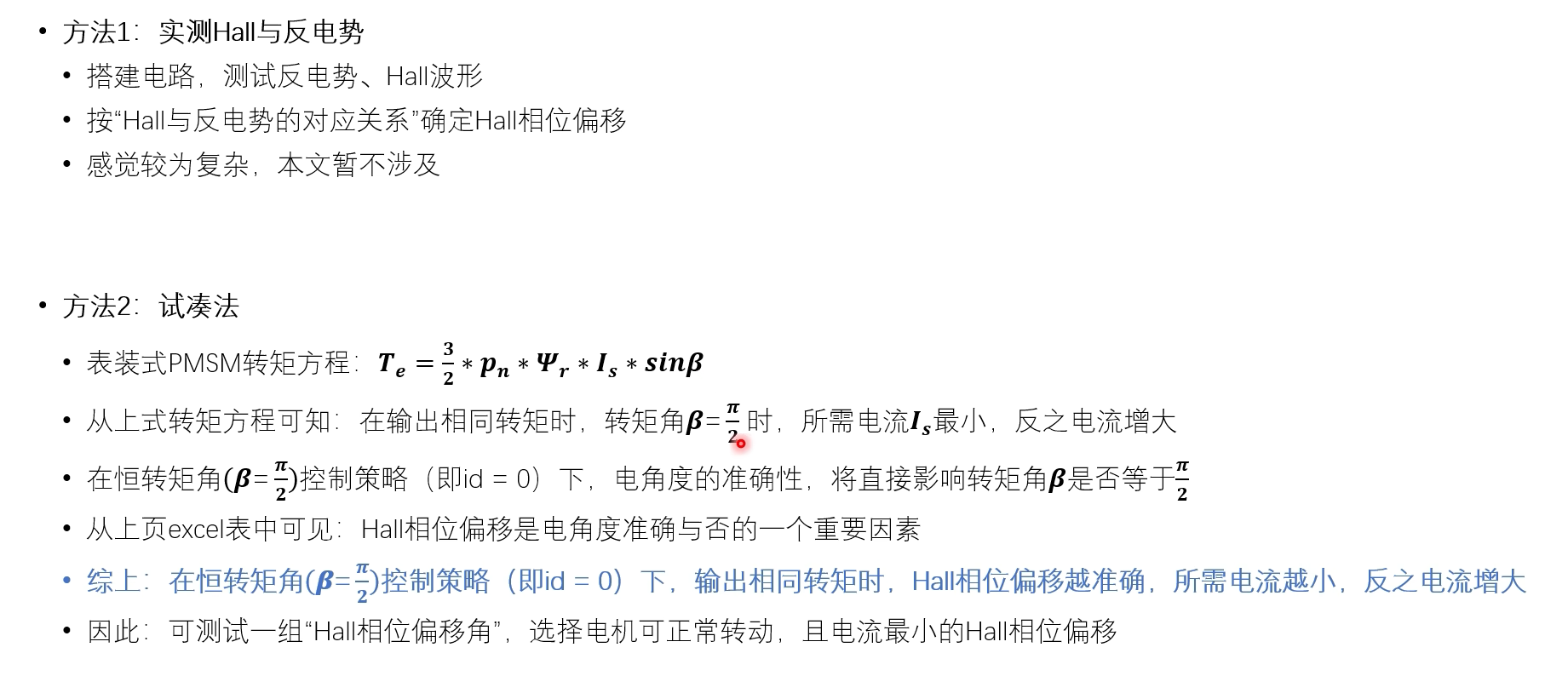
试凑法测量
1.3反电势与电角度的关系
旋转的电压矢量,旋转的电流矢量,旋转的磁链矢量;
其中磁链矢量等于转子磁链矢量加上定子磁链矢量;
下图所示为定子绕组的等效电路,绕组两端的电压等于电阻上的电压加上旋转磁场在电感中产生的感应电动势;
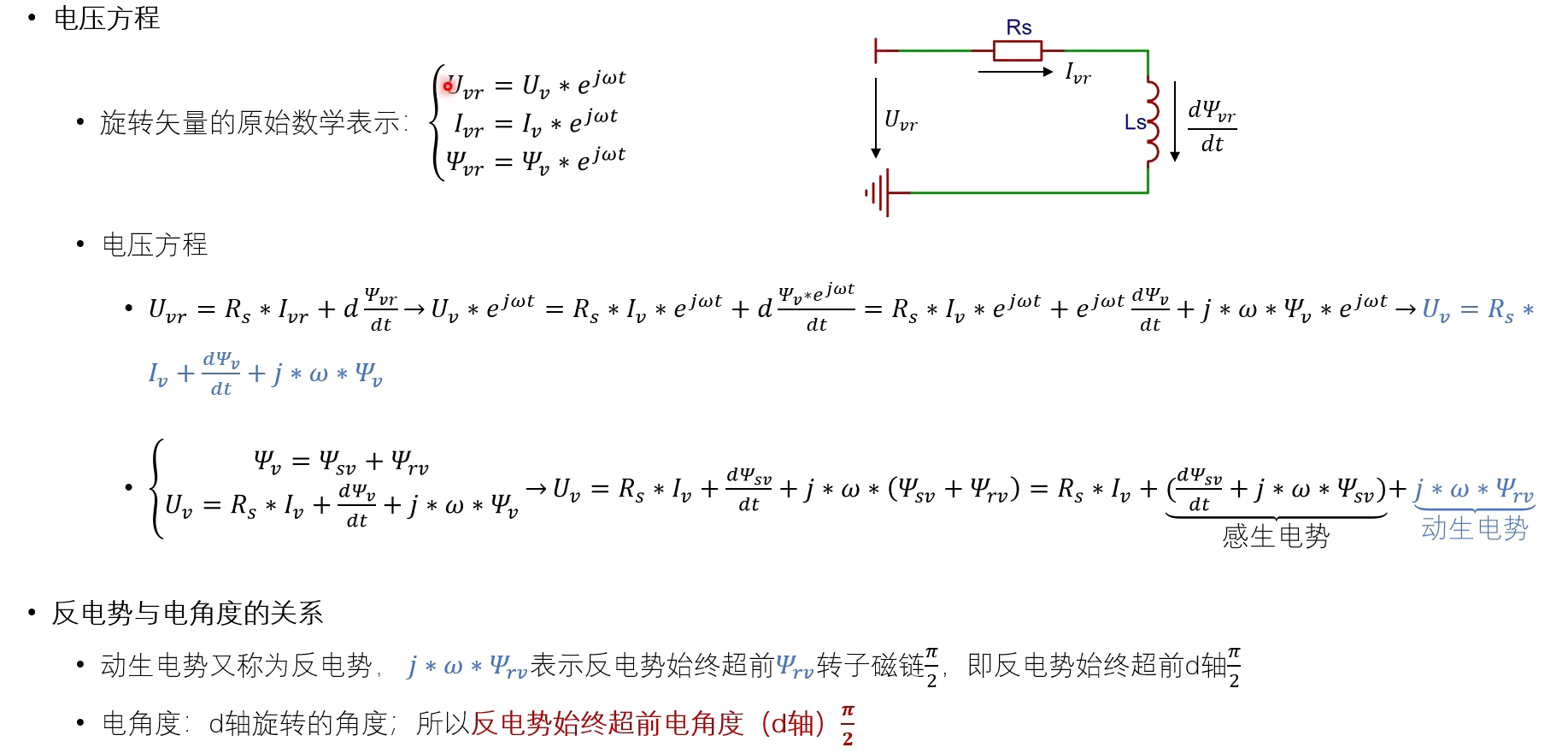
经过推导得到数学公式,绕组两端的电压等于电阻上的电压加上感生电势加上动生电势;
1.4hall速度与电角度计算
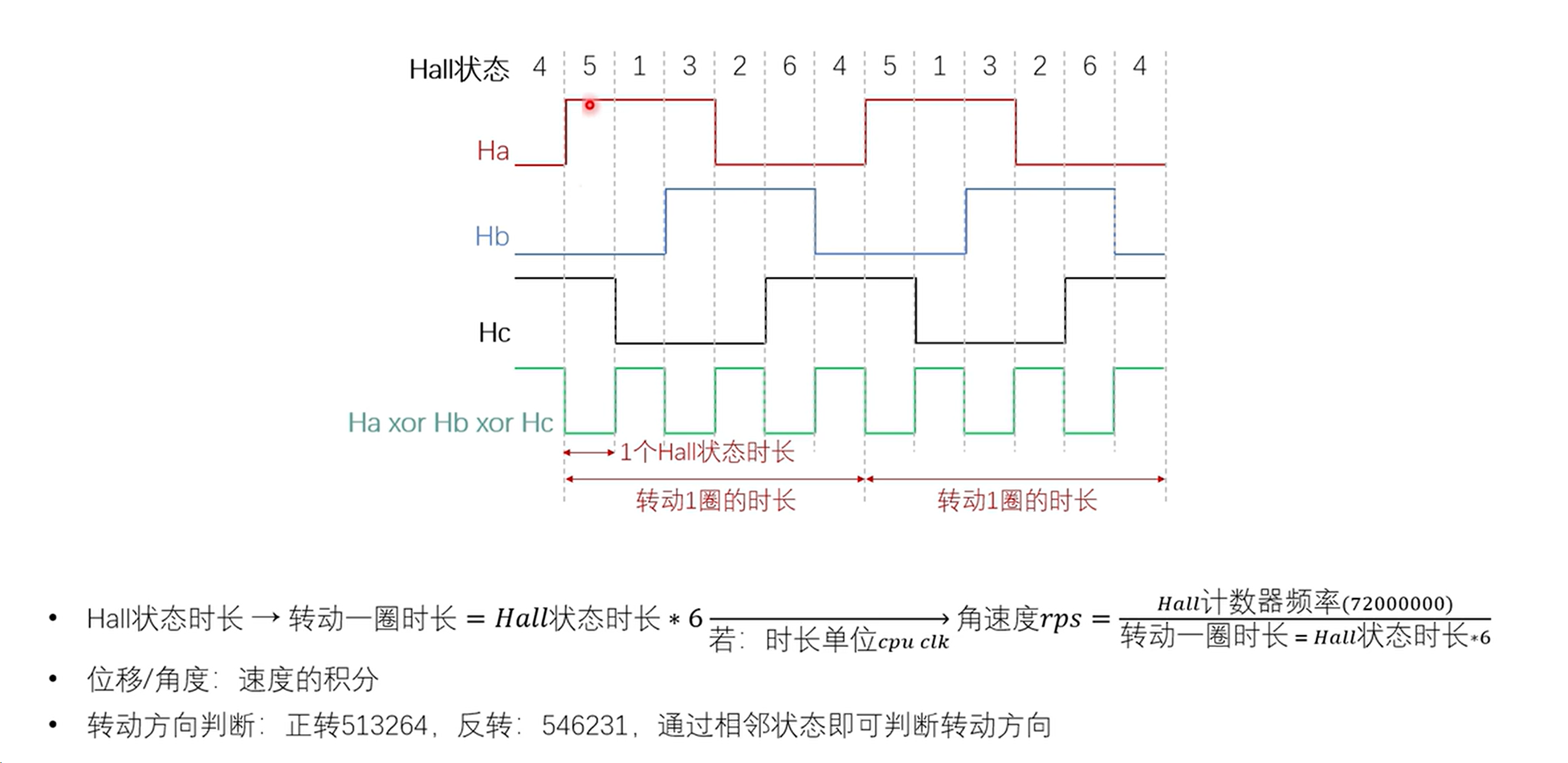
hall异或操作:Ha or Hb or Hc,例如5分区ha为1,hb为0,异或为1;hc为1,ha与hb的结果与hc异或,即1与1异或,结果为0;
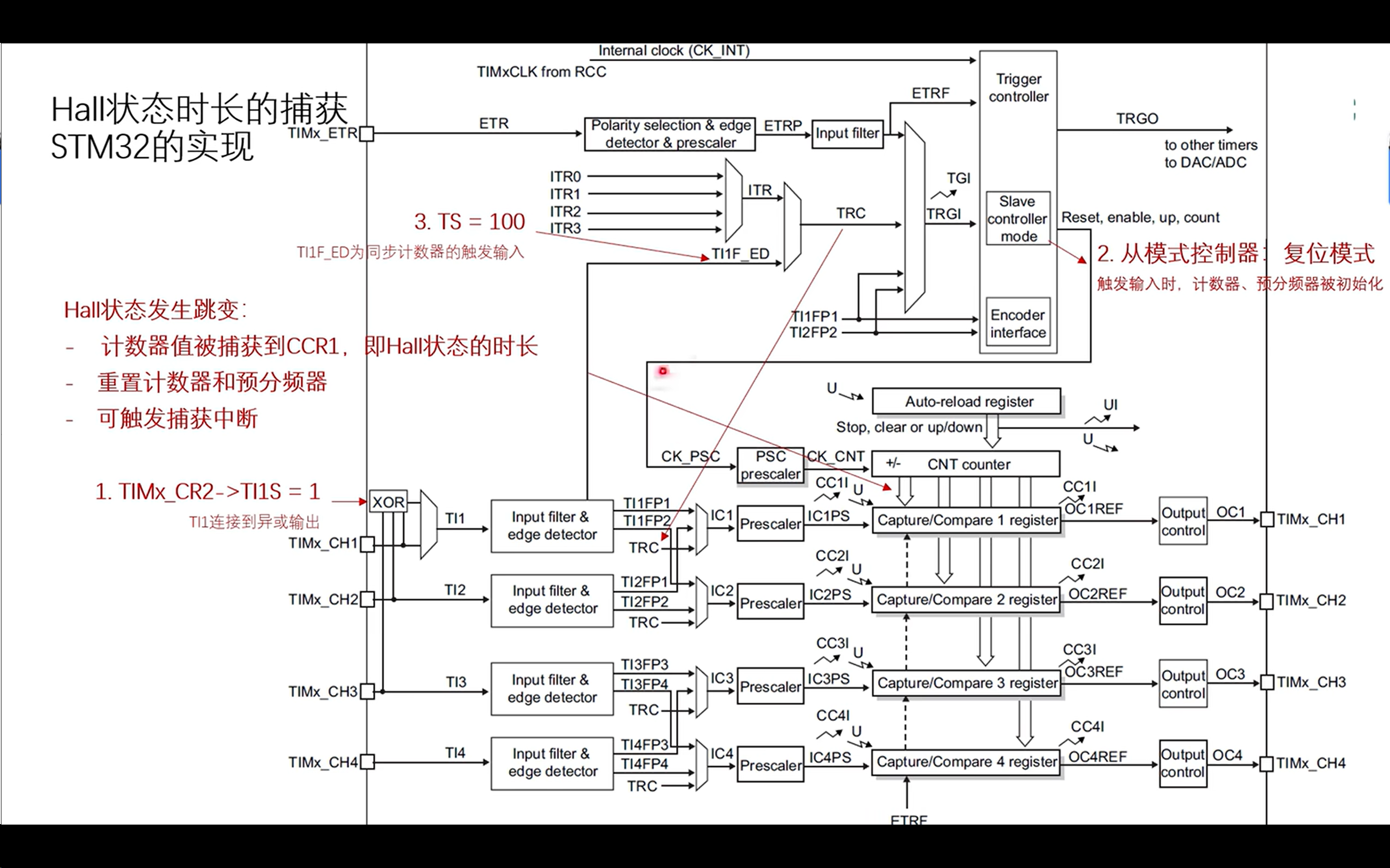
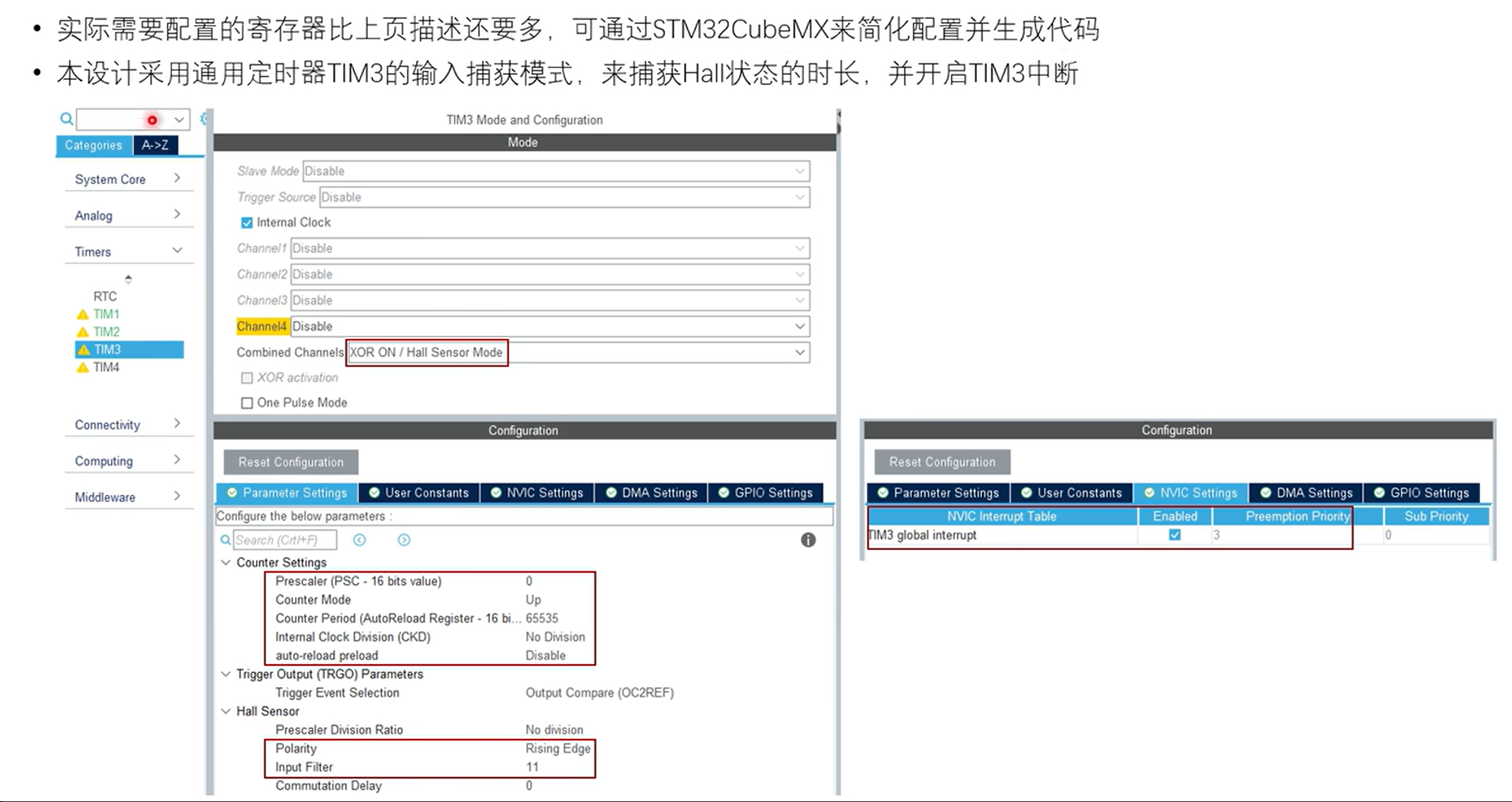
stm32设置对hall状态时长的捕获
把3个hall传感器连接到芯片定时器的3个输入通道上;
第一步配置控制寄存器2的TI1S位,使其等于1;它能够让TI1连接到三个霍尔传感器的异或输出;
第二步配置从模式控制器为复位模式,在复位模式下,当触发输入时,计数器和预分频器被重置;
第三步配置触发选择TS等于100,它将选择TI1F_ED,实际上就是三个霍尔传感器的异或输出,作为触发输入,触发TRC,同时也作为捕获输入;
选择组合通道为hall传感器模式的异或打开;
计数器配置为向上计数,周期为65535;
hall传感器配置为极性上升沿,输入滤波配置为11(根据实际效果去配置);
打开TIM3的全局中断;
1.5代码实现
核心函数
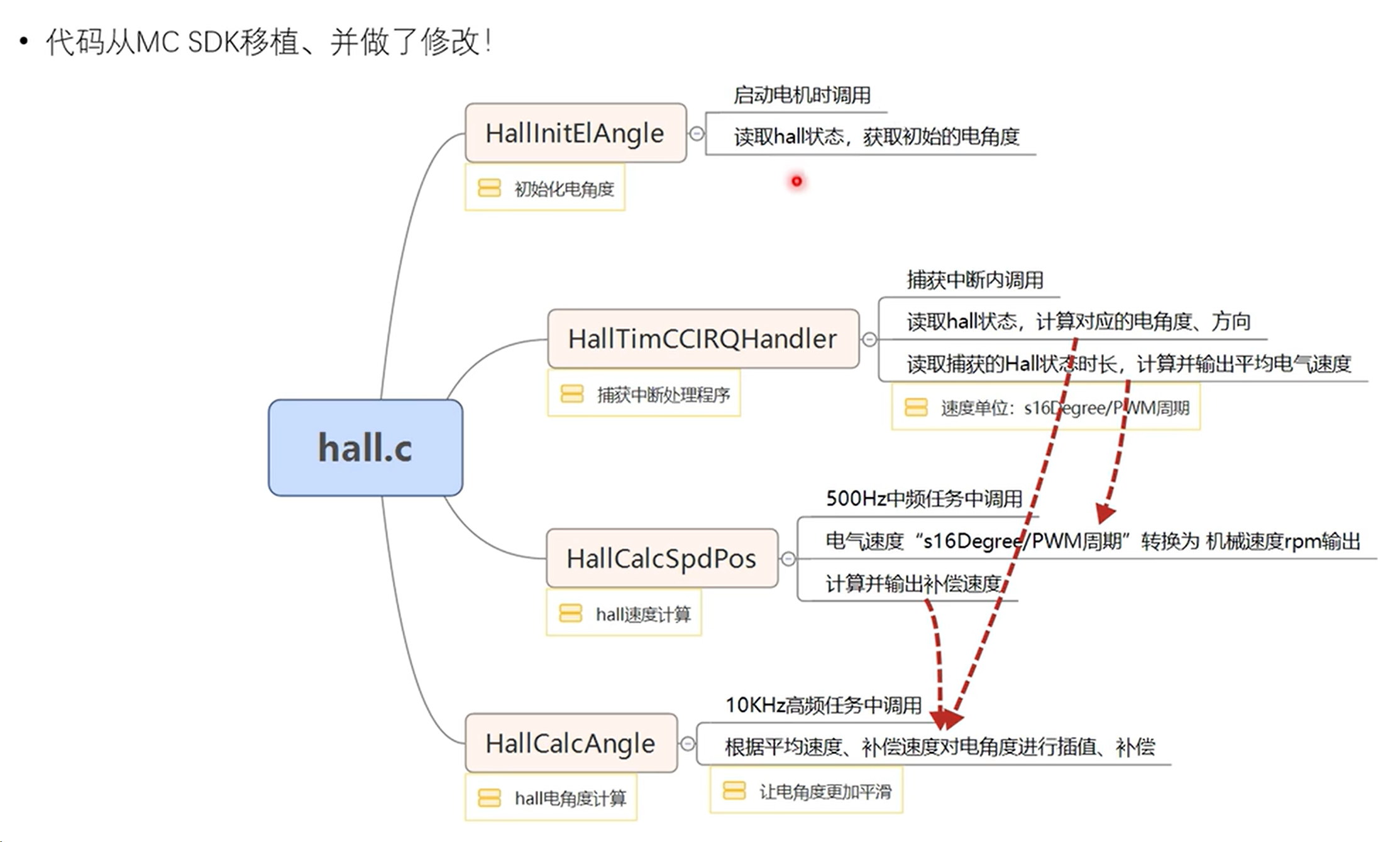
首先调用hall初始化电角度函数,通过GPIO读取当前的hall状态;根据当前hall状态设置对应的电角度,如下图表所示;
每个hall状态都等于hall相偏移加上每个状态对应的角度;

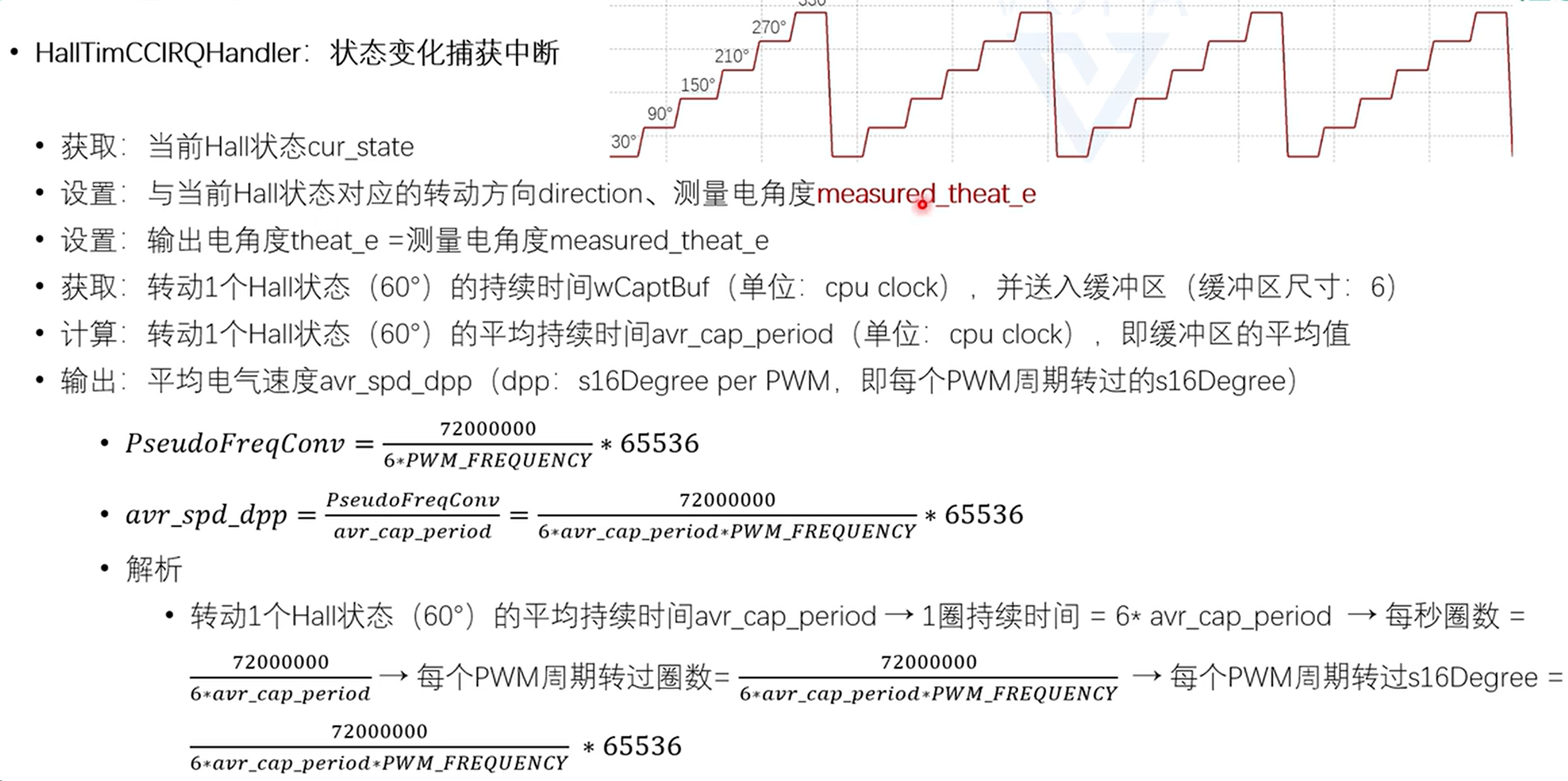
捕获中断处理函数
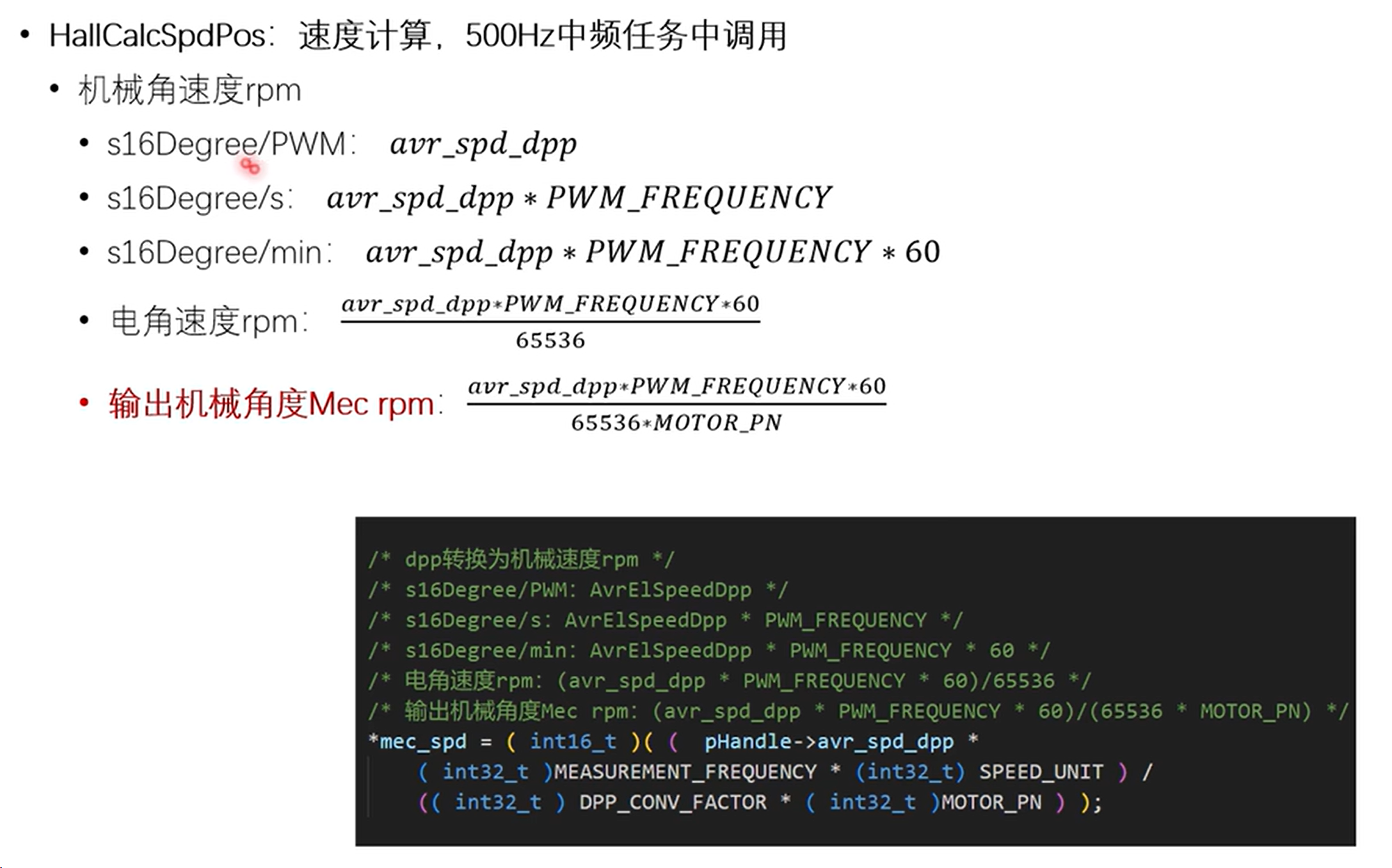
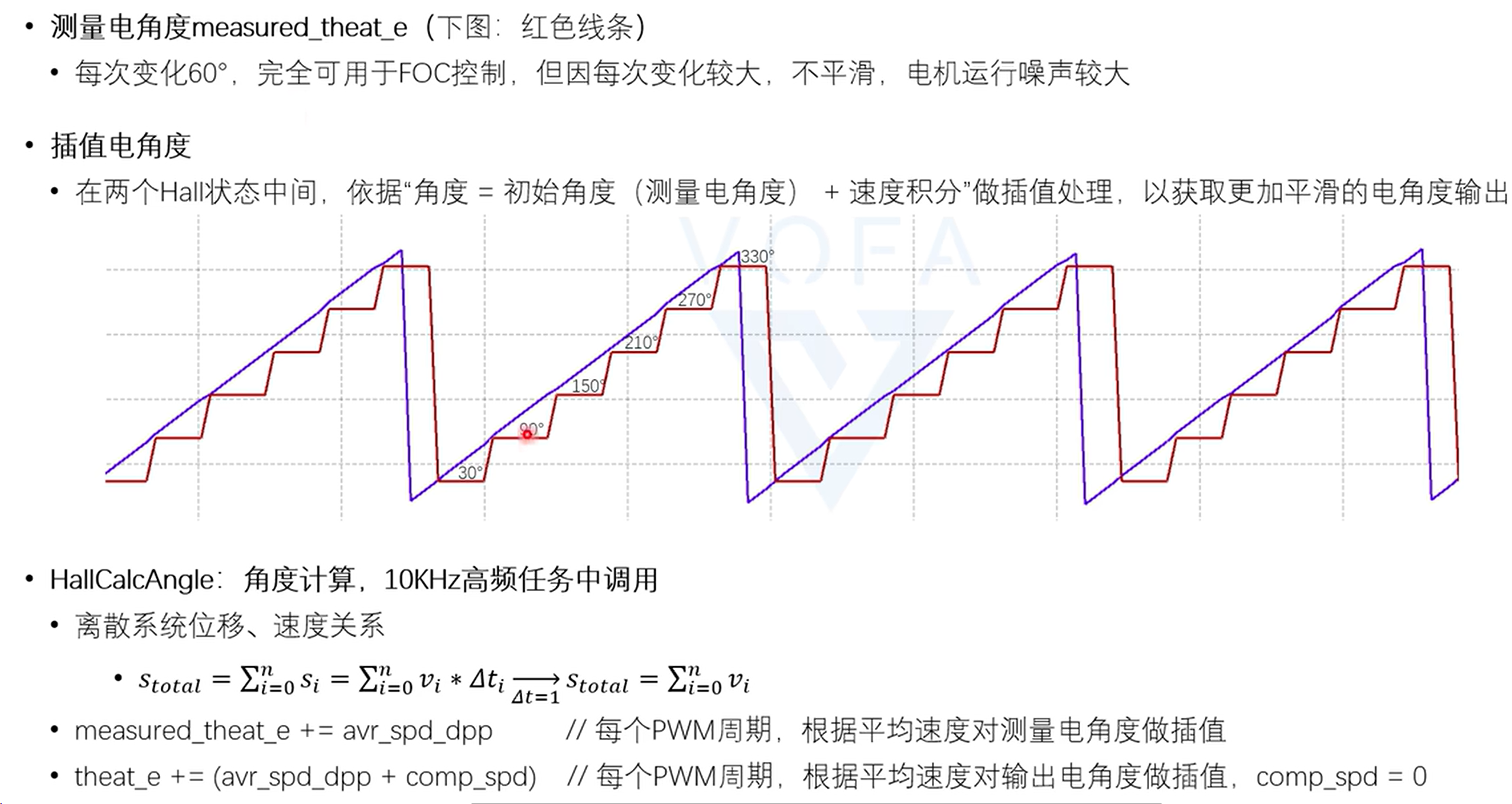
hall计算速度
hall电角度计算
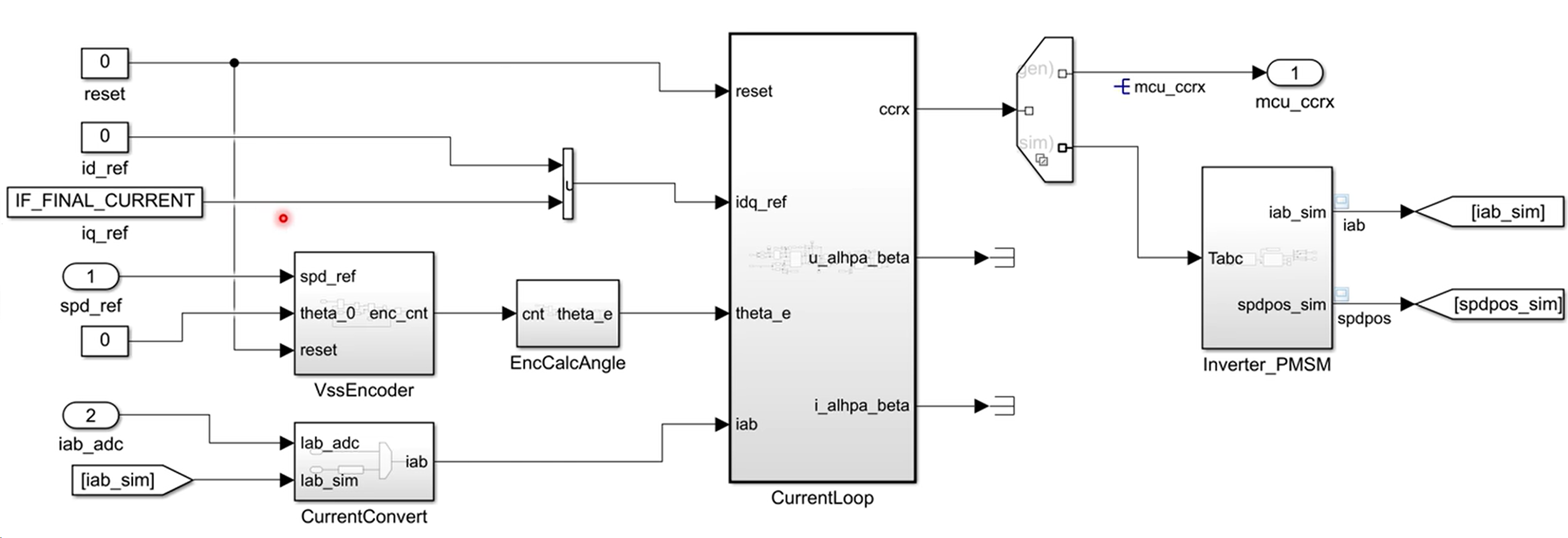
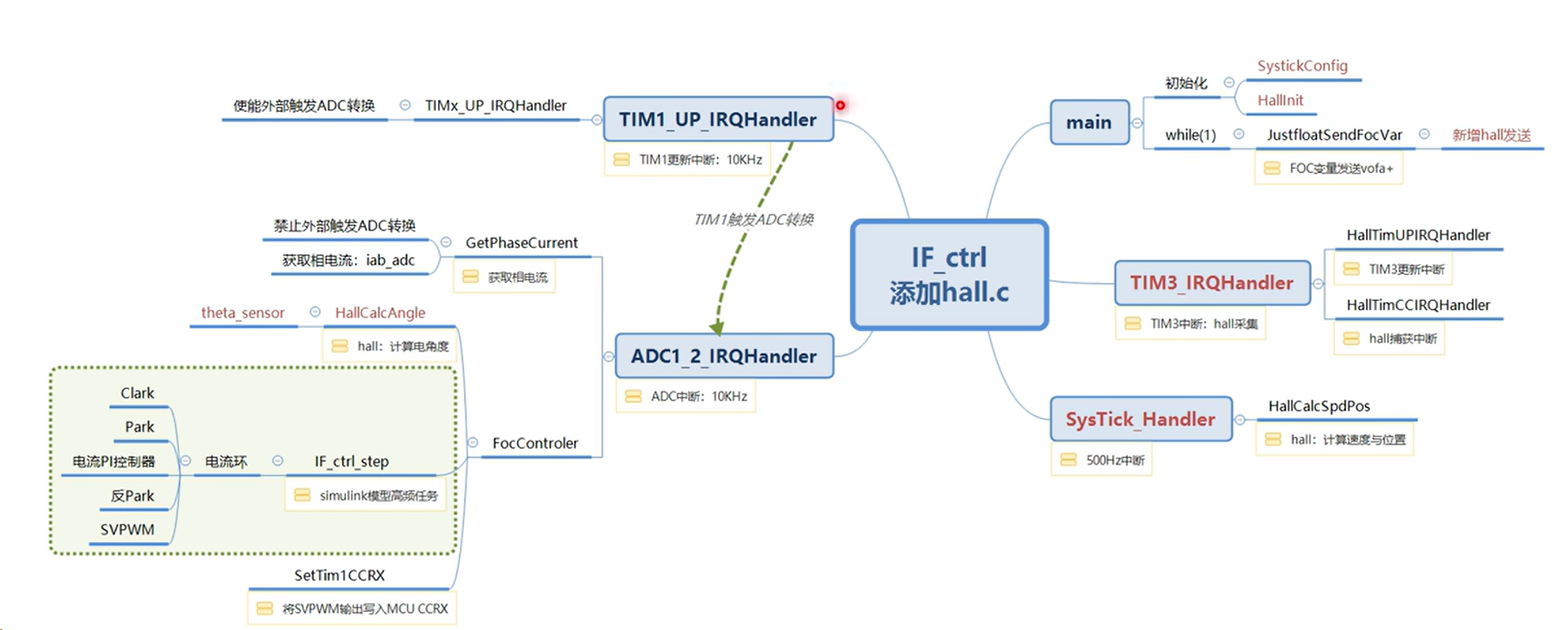
1.6工程框架
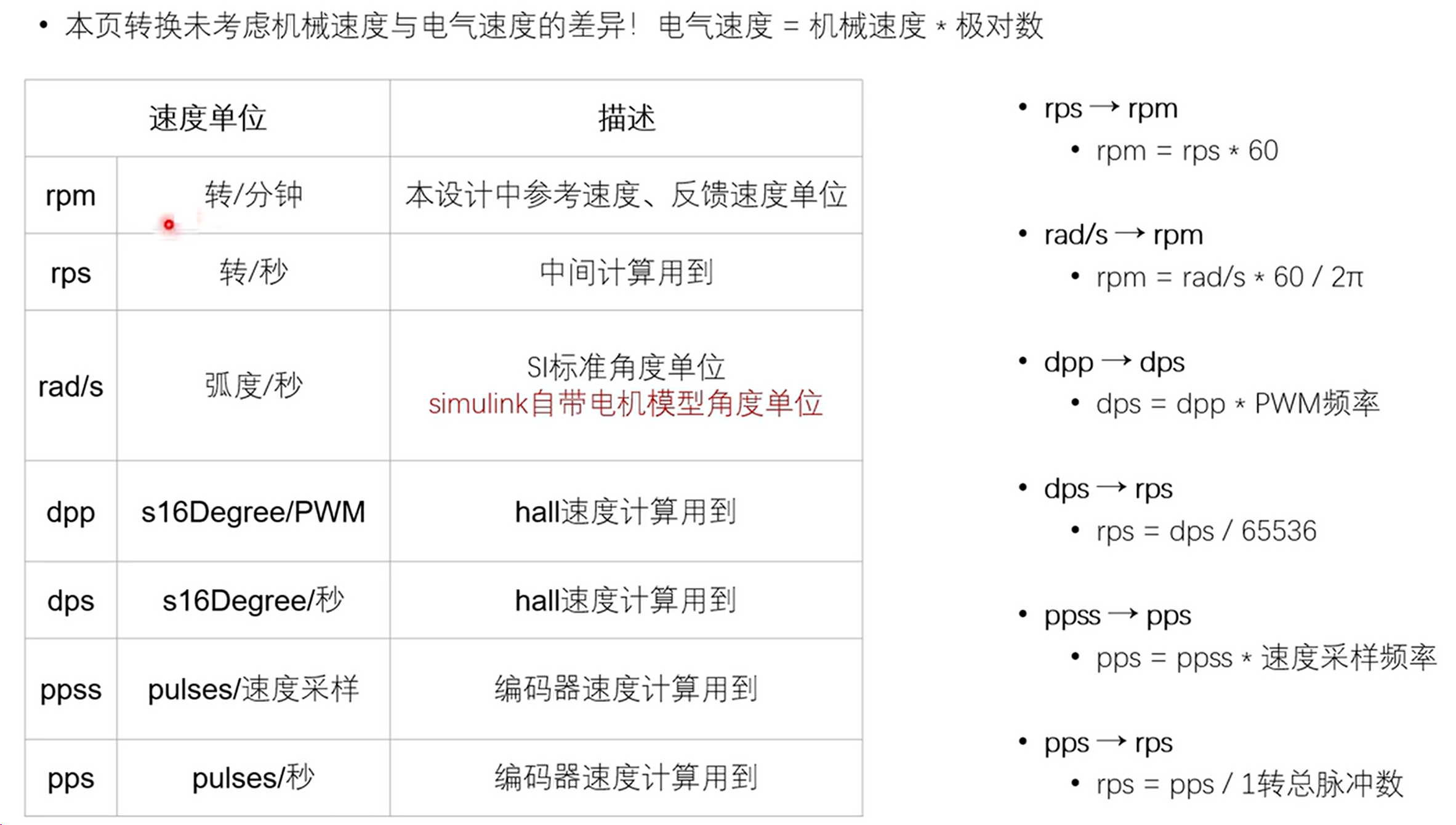
2、各种速度与角度的转换
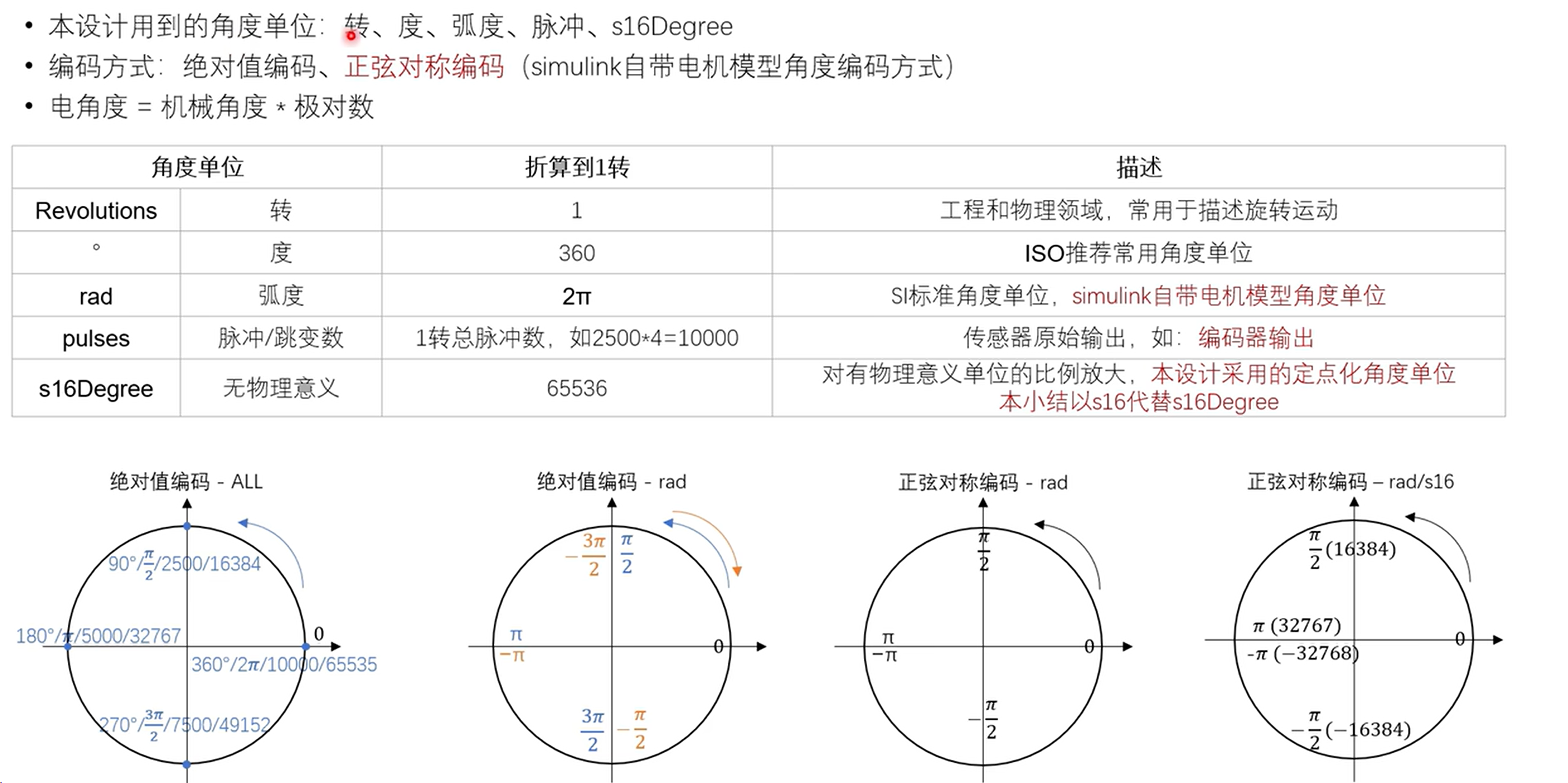
2.1角度转换
角度的表示
编码器脉冲->电角度
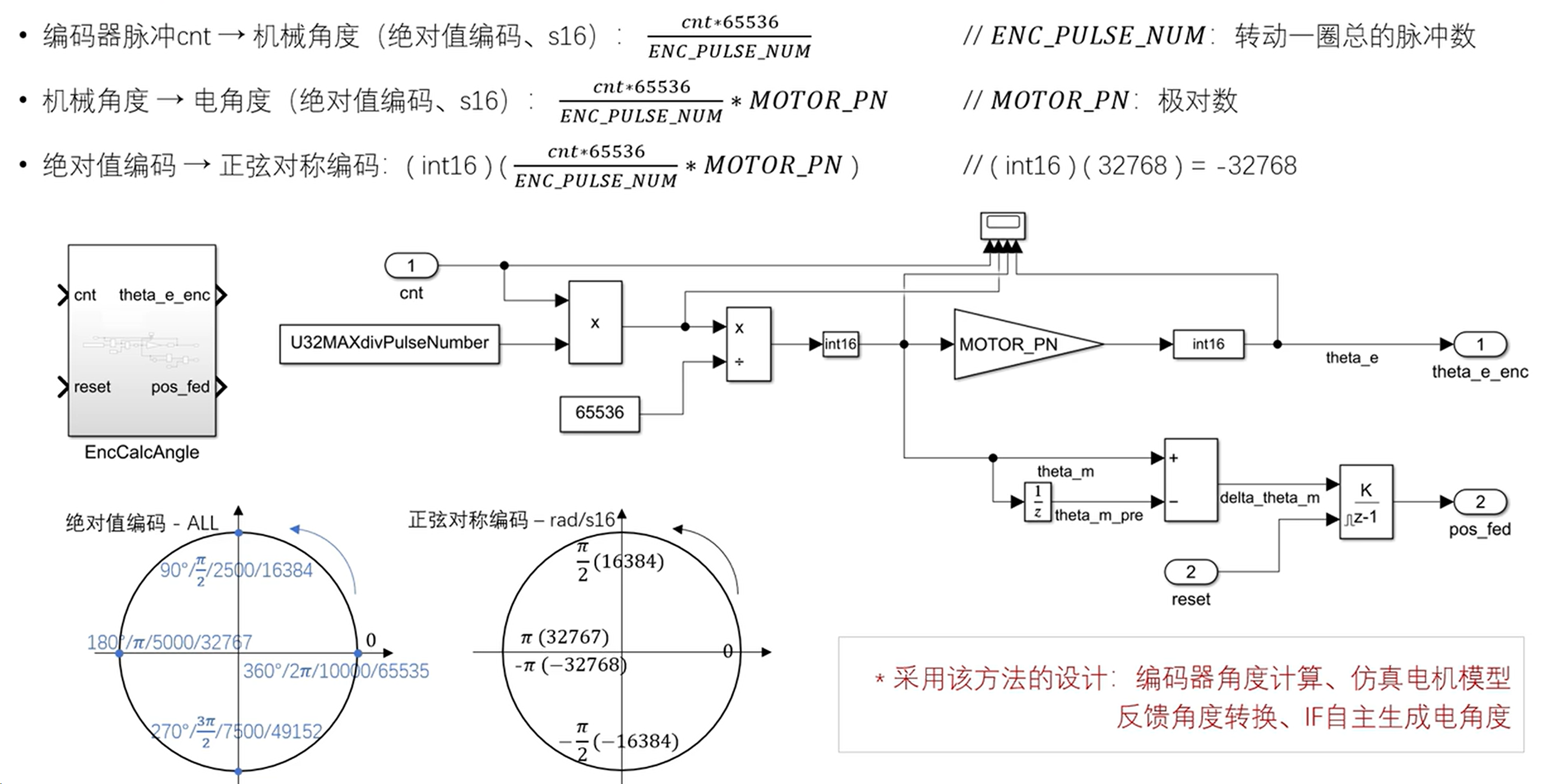
机械角度->电角度
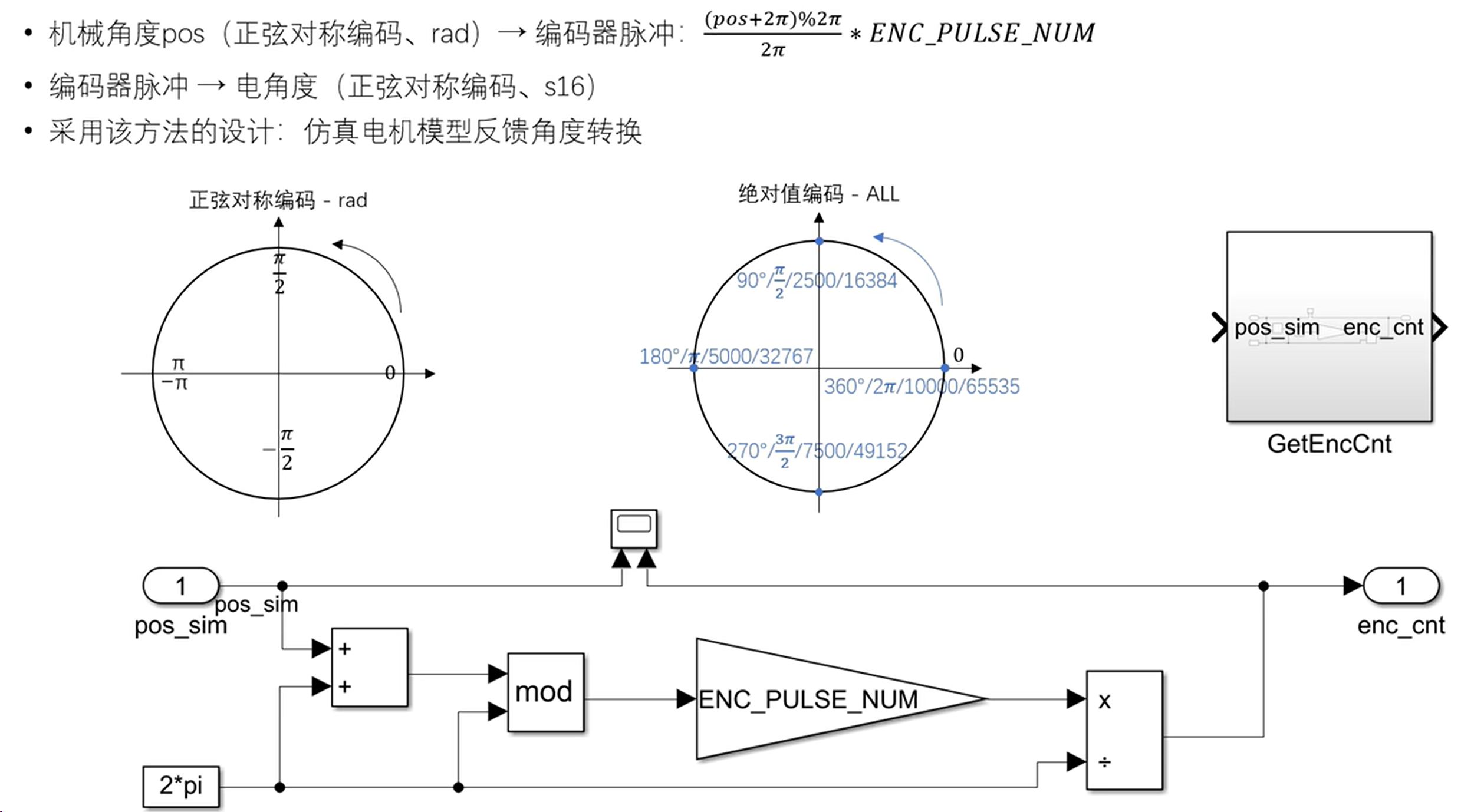
IF自主生成电角度
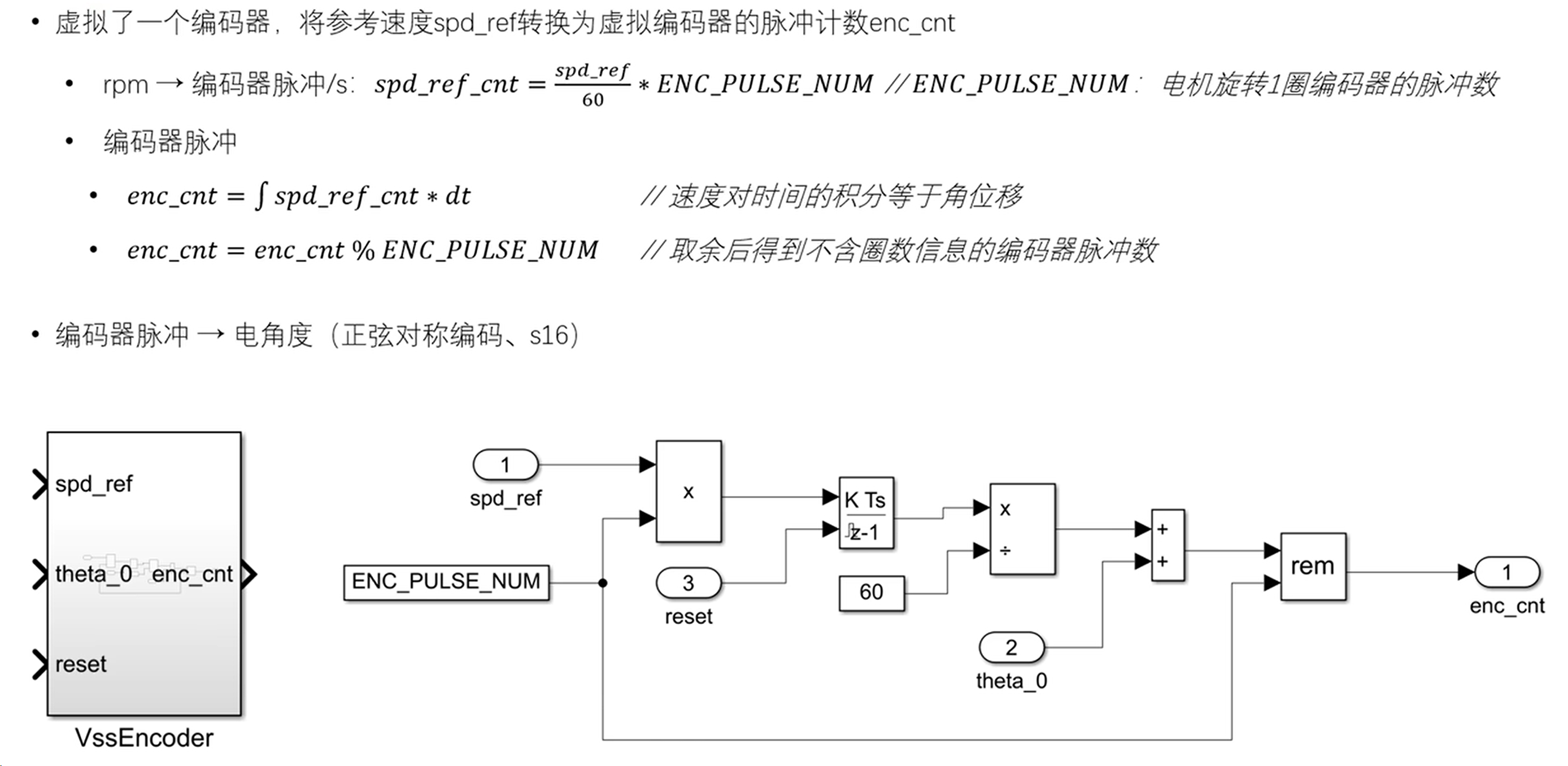
2.2速度转换