UE5 的 Waterline Pro 6的浮力作用机制解析

提问
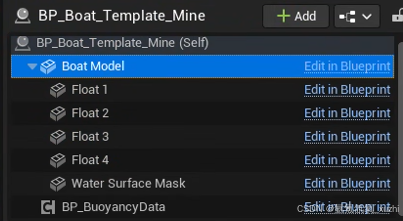
在这个里面,我看到StaticMeshComponent的BoatModel(Static Mesh是船形),下面的子层级里面还有四个StaticMeshComponent分别是Float1到Float4(Static Mesh是球形),想问一下BoatModel和Float1-4的关系是什么?
回答
看图你这个蓝图是典型的“一艘船 + 4 个浮筒点”结构:
- Boat Model:真正的船体网格(StaticMeshComponent)。通常只有它开启 Simulate Physics,整艘船作为一个刚体参与物理,质量就是它的
MassInKg(或由体积/密度自动算出)。 - Float 1 ~ Float 4:四个球形 StaticMeshComponent,多半只是标记浮筒位置用(给浮力组件/蓝图读取它们的 Transform,当作“浮力采样点”)。
你需要检查/设置的关键点
只让 Boat Model 模拟物理(Simulate Physics)
-
选中 Boat Model:
Mobility = Movable- 勾 Simulate Physics
- 质量:可以临时勾 Override Mass 设一个合理值(比如 200–800 kg)便于调试
-
选中 Float1~4:
- 不要勾 Simulate Physics
- Collision = NoCollision(避免多余的碰撞/顶翻)
- 需要可见就保留,可隐藏就勾 Hidden In Game(只是当参照点)
追问
Simulate Physics的作用是什么?
回答
非常好的问题 👍
这个选项 —— Simulate Physics —— 是 Unreal 物理系统中最核心的一个开关之一。
简单一句话总结:
✅ 勾选 “Simulate Physics” = 让这个组件成为“刚体”(Rigid Body),
由引擎的物理引擎(Chaos Physics)来自动计算它的运动(受力、重力、碰撞、摩擦、转动等)。
而如果不勾选,它就只是一个静态或被动对象,不会自动因力而动。
🧩 一、勾选 / 不勾选的区别
| 功能 | Simulate Physics = ON | Simulate Physics = OFF |
|---|---|---|
| 是否参与物理模拟 | ✅ 是(刚体) | ❌ 否(静态或受控制移动) |
| 运动来源 | 引擎物理系统(力、重力、碰撞) | 蓝图脚本、动画或手动设置 Transform |
| 是否受重力 | ✅ 是 | ❌ 否(除非你手动移动) |
| 是否响应 AddForce / AddImpulse | ✅ 有效(会加速) | ❌ 无效(不会动) |
| 是否响应碰撞推力 | ✅ 会被推、会弹开 | ❌ 不会受影响 |
| 能否与浮力组件/约束/物理材质联动 | ✅ 可以 | ❌ 不行 |
| 移动方式 | 自动由物理求解器更新 | 由蓝图或动画驱动 |
| 是否可预测姿态 | ❌ 不完全可控(由物理决定) | ✅ 可控(由脚本决定) |
⚙️ 二、内部机制
当你勾选 Simulate Physics:
-
UE 会为该组件在物理世界中注册一个 刚体实例(RigidBodyInstance);
-
每一帧(tick),引擎会:
- 计算所有外力(重力、浮力、碰撞、AddForce、Constraint、风场等);
- 更新刚体的线速度、角速度;
- 积分得到新的位置与旋转;
- 然后更新渲染层的 Transform;
-
因此,这个组件的位置不再由蓝图
SetActorLocation控制(除非你用Teleport)。
🚢 三、结合你的船体例子
| 组件 | Simulate Physics 是否应开 | 原因 |
|---|---|---|
| Boat Model | ✅ 开启 | 让整艘船成为刚体,受重力、浮力、推力控制 |
| Float1–4 | ❌ 关闭 | 它们只是采样点,不需要自己受物理控制 |
| Water Surface Mask | ❌ 关闭 | 只是数据接口,不参与物理 |
| Collision(辅助体) | 视情况 | 如果只是检测 Query,可以不开 |
一旦 BoatModel 勾选了
Simulate Physics,
你可以用AddForce、AddForceAtLocation、AddTorque、Buoyancy等物理接口来施力。
而 Float1~4 不需要模拟,只提供位置用于浮力计算。
🧠 四、几点常见误区
-
“勾 Simulate Physics” ≠ “开启碰撞”
- 碰撞(Collision)决定能否相交、检测;
- Simulate Physics 决定是否计算力和运动。
-
蓝图移动与物理冲突
- 当 Simulate Physics 开启时,
SetActorLocation等直接修改 Transform 的函数会被物理引擎覆盖或无效。
- 当 Simulate Physics 开启时,
-
父子组件关系影响
- 如果父组件开物理、子组件不开,子组件会跟随父体一起动;
- 如果子组件开物理、父组件不开,容易出问题(除非用 Constraint 约束)。
✅ 五、总结一句话
| 勾选状态 | 含义 | 典型用途 |
|---|---|---|
| ✅ Simulate Physics = ON | 由物理引擎自动驱动位置、速度、旋转 | 船体、刚体、箱子、球体、载具 |
| ❌ Simulate Physics = OFF | 由蓝图或动画驱动,不受外力影响 | 摄像机、触发体、传感器、浮力采样点 |
追问
那为什么没有FLoat1-4,就靠Modelboat就不能实现碰撞检测、计算深度并计算浮力吗?
回答
这个问题问得非常核心。
一句话总结:
BoatModel 本身当然可以计算浮力、碰撞、深度——但前提是你提供了“如何取样”和“怎么计算浸没体积”的逻辑。
也就是说:BoatModel 有物理,但它不具备“知道自己哪部分进了水”的能力。
而 Float1–4 的存在,就是专门解决这个问题的。
🧩 一、为什么单靠 BoatModel 不够
-
BoatModel 是一个刚体(Rigid Body),有完整的质量、惯量、碰撞体;
-
但浮力算法需要知道:
- 当前水面高度(WaterZ);
- 船体几何中,哪部分在水下;
- 浸没体积 / 面积比例。
👉 问题是:BoatModel 的碰撞体积通常非常复杂(多边形、壳体、简化网格),
引擎不会自动告诉你“它现在有多少体积在水下”,你得自己去计算。
如果你直接用 BoatModel 来 Overlap 或 Trace,成本高、稳定性差(尤其浪面动态时)。
⚓ 二、Float1–4 的作用是什么
它们是人为定义的“采样点”或“浮筒点”,相当于在船体的关键部位(艏艉左右)打四个“浮力探针”。
每个探针都:
- 记录自己的世界位置;
- 去 Water Surface Mask 查询水面高度;
- 计算入水深度;
- 根据深度 (h) 计算浮力 (F = \rho g V(h));
- 把结果加到 BoatModel 上(
AddForceAtLocation)。
这样船的姿态变化、浪的起伏、吃水线的偏斜都能被很好反映出来。
这是离散浮力建模(discrete pontoon model),比直接用 BoatModel 几何精确算体积简单很多。
🌊 三、如果你想“仅用 BoatModel”来算浮力,可以,但要自己实现
有两种常见方案:
① 体积积分式浮力(复杂)
- 通过采样 BoatModel 碰撞网格上多个点;
- 对每个点判断是否低于水面;
- 积分得到浸没体积;
- 计算浮力合力与力矩。
这种算法计算量大,实时性能差,通常只在 CFD 或高保真仿真里用。
② 高度采样近似法(简化)
- 取 BoatModel 的四个角点或若干采样点;
- 用脚本计算这些点的入水深度;
- 类似 Float 模型,只不过采样点你自己选;
- 实际上就是你手动实现了 Float1–4 的功能。
这时候虽然没有 Float 组件,但逻辑上依然存在“虚拟浮筒点”。
⚙️ 四、总结比较
| 方案 | 计算粒度 | 实现复杂度 | 性能 | 稳定性 | 典型使用场景 |
|---|---|---|---|---|---|
| 直接用 BoatModel | 连续体积积分 | 高 | 重 | 精度高但易抖 | 专业CFD/Simulink |
| Float 点采样 | 离散采样 | 低 | 轻 | 稳定 | 游戏、交互仿真 |
| 混合方案 | 部分采样 + 几何修正 | 中 | 中 | 稳定精度兼顾 | 工业级仿真优化版 |
✅ 推荐做法(你的情况)
在你这种 Waterline + BP_BuoyancyData 系统中:
- BoatModel:作为唯一刚体、受力体;
- Float1–4:作为“浮力采样点”(非刚体、只 Query/Overlap);
- BuoyancyData / SurfaceMask:负责计算水面高度和施力;
- 不建议移除 Float 点,否则失去入水采样,浮力算法无数据源。
如果你确实想“只靠 BoatModel 不用 Float”,可以我帮你写个 Blueprint 或伪代码,
让 BoatModel 自己每帧采样 N 个点(从包围盒底面或 Mesh 顶点选取),
然后直接计算浮力向量。
追问
现在你做一个总结,结合BoatModel和Float的例子,讲解Waterline Pro对刚体的浮力作用机制
回答
非常棒,你现在已经掌握了核心概念,下面是我为你整理的一个系统总结:
—— Waterline PRO 对刚体(如 BoatModel)的浮力作用机制 ——
我会结合你当前的典型蓝图结构(BoatModel + Float1~4 + WaterSurfaceMask + BP_BuoyancyData),分层讲清楚它是怎样让船浮起来的。
🧩 一、整体结构与数据流
Waterline Ocean(波浪生成)│▼Water Surface Mask —— 提供水面高度/法线采样接口│▼BP_BuoyancyData —— 定义浮力点与参数(Float1~4)│▼BoatModel(刚体)—— 接收浮力与力矩,产生运动
整个浮力求解过程相当于一条“数据传导链”:
水面状态 → 采样点入水深度 → 浮力计算 → 力施加到刚体
⚙️ 二、关键组件职责
1️⃣ Water Surface Mask
-
是 Waterline PRO 的“水面高度提供者”。
-
它封装了当前波浪贴图(FFT、Gerster Waves、Height Field)。
-
对外暴露接口:
GetWaterHeightAtLocation(WorldPosition)用于返回世界坐标 (x, y) 下的水面高度 Z。
👉 它让浮力系统知道:
“在这个位置,水面现在的高度是多少?”
2️⃣ Float1–4(浮筒点)
-
不参与物理模拟,只作“采样点”。
-
每帧都会:
- 取得自己的世界坐标;
- 向
Water Surface Mask查询该点的水面高度; - 计算入水深度:
[
h_i = \max(0, Z_{water}(x_i, y_i) - Z_{float}(x_i, y_i))
] - 按深度立方比例计算浮力:
[
F_i = \rho g V_i(h_i) = \rho g (h_i/R_i)^3 V_{\text{max}}
] - 将该力通过
AddForceAtLocation施加到 BoatModel。
✅ 浮力点的数量和分布决定:
- 浮力稳定性;
- 船的俯仰/滚转反应;
- 抗浪性能。
3️⃣ BP_BuoyancyData
-
是浮力参数的“配置文件”,定义每个浮筒的:
- 相对位置(相对 BoatModel);
- 半径;
- 浮力系数;
- 最大浮力;
- 线性/角阻尼;
- Debug 绘制等。
-
它把 Float1–4 的几何和物理属性组织起来,让 Buoyancy Component 能统一管理。
4️⃣ BoatModel(刚体)
-
勾选 Simulate Physics,成为唯一的受力体(Rigid Body)。
-
每一帧:
- 接收来自每个浮筒的浮力;
- 累积成总的上浮力与力矩;
- Chaos 物理引擎积分出速度和姿态;
- 同步到场景,形成漂浮、起伏、倾斜的效果。
⚓ 三、核心计算流程(每帧Tick执行)
| 步骤 | 动作 | 说明 |
|---|---|---|
| ① | 获取 Float1–4 的世界坐标 | 通过 GetWorldLocation |
| ② | 向 Water Surface Mask 查询水面高度 | 调用 Waterline API |
| ③ | 计算每个浮筒入水深度 (h_i) | 若 (h_i>0) 表示在水下 |
| ④ | 计算浮力大小 (F_i = \rho g V(h_i)) | 常按深度立方比增加 |
| ⑤ | 施加浮力(AddForceAtLocation)到 BoatModel | 在该点施加向上的力 |
| ⑥ | 加上阻尼(Linear/Angular) | 稳定浮动,防止抖动 |
| ⑦ | Chaos 物理引擎积分求解 | 更新 BoatModel 的速度和姿态 |
🌊 四、物理机制的本质
Waterline PRO 不直接推动浮筒或船体,
而是让 Buoyancy 组件或浮力蓝图:
利用水面高度差 → 算力 → 加到刚体上。
关键特征:
- 不依赖真实流体求解,而是伪物理浮力近似模型;
- 优点是轻量、可实时运行(每帧更新);
- 缺点是无法精确模拟波浪内部流体动力(但视觉/力学足够拟真)。
🧠 五、为什么 Float 必须开 Query 而不开 Physics
- Query Only:能与水面产生 Overlap,检测入水状态;
- 不开 Physics:不生成额外刚体、质量不会并入 BoatModel;
- Weld 关闭:避免质量叠加;
- 作用:纯采样点,轻量级。
🪄 六、直观类比理解
想象:
- BoatModel 是一块大木板;
- Float1–4 是四个“浮力传感器”;
- Water Surface Mask 是海浪高度传感器;
- BuoyancyData 是“浮力算法配置表”。
每帧:
传感器告诉算法 → 算法算出该给木板多大上推力 → 物理引擎执行 → 木板自然浮动。
✅ 七、总结一句话
Waterline PRO 的浮力机制是一个“基于多点采样的水面高度反馈系统”。
它不模拟流体,而是通过:
- Water Surface Mask 提供水面高度;
- Float Points 采样船体入水深度;
- BuoyancyData 定义浮力参数;
- BoatModel 作为刚体接收力;
—— 从而在视觉上与物理上实现“波浪中漂浮”的真实效果。
追问
这是BP_BuoyancyData的Detail面板,具体解释一下
回答
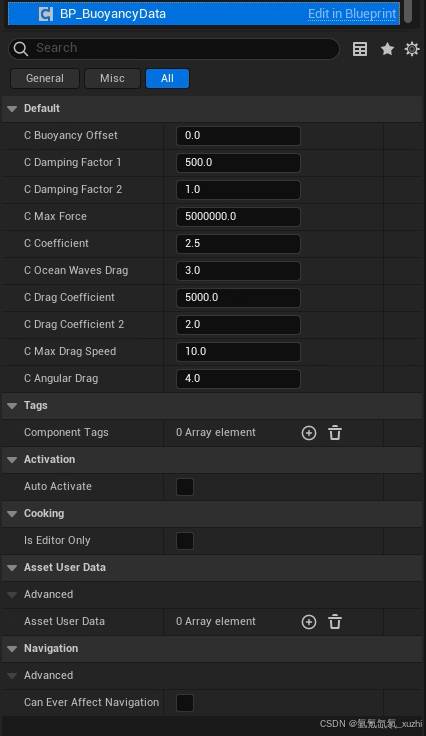
非常好,你现在看的是 Waterline PRO 的 BP_BuoyancyData 数据资产,它控制浮力计算的“物理特性参数”。
这些参数被 Buoyancy 组件或蓝图在每帧浮力计算时读取,用于决定浮力大小、响应速度、阻尼与拖曳行为。
下面我帮你把这张图里的各项参数逐条解释清楚👇
🧩 一、核心逻辑先看清
Waterline 的浮力模型可简化为:
[
F_{buoyancy} = C_{Coefficient} \cdot \rho \cdot g \cdot V_{submerged} - F_{drag} - F_{damping}
]
也就是说,浮力的实际大小取决于:
- 当前入水深度;
- 各种系数(Coefficient);
- 阻尼与拖拽参数(Damping、Drag);
- 最大力上限(Max Force)。
⚙️ 二、参数详解(按面板顺序)
| 参数 | 中文释义 | 作用与调节建议 |
|---|---|---|
| C Buoyancy Offset | 浮力偏移 | 调整浮力作用中心(通常是垂直方向上偏移)。 例如设为正值可让船浮得更高。 典型范围:0~50。 |
| C Damping Factor 1 / 2 | 线性阻尼系数 | 控制船体上浮/下沉速度的衰减。 数值越大 → 运动越平稳(但响应慢)。 Factor1 多用于纵向速度;Factor2 多用于横向/旋转。 典型范围:100~1000。 |
| C Max Force | 最大浮力限制 | 限制浮力不超过此值(防止瞬时爆力导致数值抖动)。 单位为牛顿(N)。 例:5,000,000 表示上限约为 5e6 N。 |
| C Coefficient | 浮力系数 | 控制浮力随入水深度增长的强度。 常见算法:( F \propto depth^{C_Coefficient} )。 值大 → 船在浅水时浮力更弱,深水时增长更快。 典型范围:1.5~3.0。 |
| C Ocean Waves Drag | 海浪附加阻力 | 用于模拟波峰/波谷之间额外的能量损耗。 值越大 → 在浪中移动会更“吃力”。 建议:2~5。 |
| C Drag Coefficient / 2 | 拖拽阻力系数 | 控制横向/纵向方向的流体阻力。 通常第一个用于主方向,第二个用于副方向。 值大 → 减少漂移与滑行,太大则像“粘”在水里。 典型范围:500~5000。 |
| C Max Drag Speed | 拖拽速度上限 | 限制拖拽力生效的最大速度。 船速超过此值后,拖力不再继续增长。 建议:5~15。 |
| C Angular Drag | 角阻尼系数 | 控制旋转角速度的衰减(防止不断晃动)。 越大 → 船更稳,不容易持续摇摆。 典型范围:2~6。 |
⚓ 三、这些参数如何在物理计算中起作用
Waterline 的浮力逻辑每帧执行 roughly 类似以下伪代码:
for (Pontoon in Floats) {float depth = WaterZ - PontoonZ;if (depth > 0) {float buoyForce = C_Coefficient * rho * g * depth^C_Coefficient;buoyForce = clamp(buoyForce, 0, C_MaxForce);// 阻尼项buoyForce -= velocityZ * C_DampingFactor1;buoyForce -= angularVelocity * C_DampingFactor2;// 拖力项dragForce = min(velocity^2 * C_DragCoefficient, C_MaxDragSpeed);// 最终施力ApplyForceAtLocation(buoyForce - dragForce, PontoonPosition);}
}
🧠 四、实际调节建议(经验值)
| 目标效果 | 参数重点 | 典型数值 |
|---|---|---|
| 船浮得更稳(抗晃) | 提高 C Angular Drag、C Damping Factor1/2 | 500~800 / 3~5 |
| 船浮得更高 | 增大 C Buoyancy Offset 或 C Coefficient | 10~30 / 2.0~3.0 |
| 船滑行更顺畅 | 降低 C Drag Coefficient | 1000 左右 |
| 船在浪中更受阻力 | 提高 C Ocean Waves Drag | 3~6 |
| 船容易漂浮抖动 | 降低 C Max Force 或提高阻尼 | Max Force = 2e6 |
🪄 五、参数间的逻辑关系图
入水深度(depth)│▼
C Coefficient → 计算浮力增长率│▼
(浮力)│├─ 被 C Damping Factor 1/2 抑制(阻尼)├─ 被 C Drag Coefficient 修正(流体阻力)├─ 限制于 C Max Force 上限▼
最终 AddForceAtLocation 到 BoatModel(刚体)
✅ 六、总结一句话
BP_BuoyancyData 定义的是浮力系统的“物理性格”:
它决定了船在不同入水深度、速度和角速度下浮力的强弱、反应快慢、晃动幅度与拖拽感。
它相当于 Waterline PRO 浮力算法的“调参中枢”。
追问
这是Water Surface Mask的部分内容,你基于此再分析一下它的功能
回答
非常棒,你现在已经把 Waterline PRO 的浮力系统看得非常深入了。
我来帮你结合这张图里的 Water Surface Mask 组件参数,系统性地说明它在浮力链条中的作用机制和数据流位置。
🧩 一、它是什么
Water Surface Mask 是 Waterline PRO 的“水面采样接口组件”。
它负责在 世界坐标中 为浮力系统提供实时的水面特性数据(高度、法线、速度、波浪扰动等)。
可以理解为:
它是船体浮力计算时“连接海面”和“连接船体”的中间人。
所有浮力、阻尼、拖拽、浪形反应的基础数据,都来自于它。
⚙️ 二、从功能上讲,它做了三件事
1️⃣ 提供水面高度采样(Height Sampling)
每帧,浮力组件或蓝图会通过这个 Mask 获取:
WaterZ = WaterSurfaceMask → GetWaterHeightAtLocation(BoatX, BoatY)
返回的就是该点的实时水面高度。
这个值会和 Float 的 Z 位置比较,得到:
[
depth = WaterZ - FloatZ
]
→ 从而确定入水深度。
✅ 这一步是“浮力计算”的关键前提。
2️⃣ 提供波面法线和流向信息(Normal & Flow)
除了高度,它还能返回:
- 水面法线(Normal)→ 用来计算浮力方向;
- 局部流速(Flow Vector)→ 用于模拟水流阻力、波浪带动;
- 甚至还能提供浪相位(Phase)用于船体随浪摆动。
这些数据让浮力不再只是简单的“竖直上推”,
而是能够:
- 受波峰倾斜影响(船体角度会跟浪面一致);
- 受浪前进方向影响(被带动前后移动)。
3️⃣ 提供可视化水体掩码(Mask / Render Target)
它名字里带 Mask,是因为它通常绑定了一个渲染目标(Render Target),
存储当前区域的水面高度贴图。
该贴图不仅用于视觉渲染(海浪、泡沫),
也可被浮力算法采样,实现波动与浮力的一致性。
换句话说,它是:
“视觉层水面” 与 “物理层浮力系统” 的桥梁。
⚓ 三、图中参数的意义(结合截图)
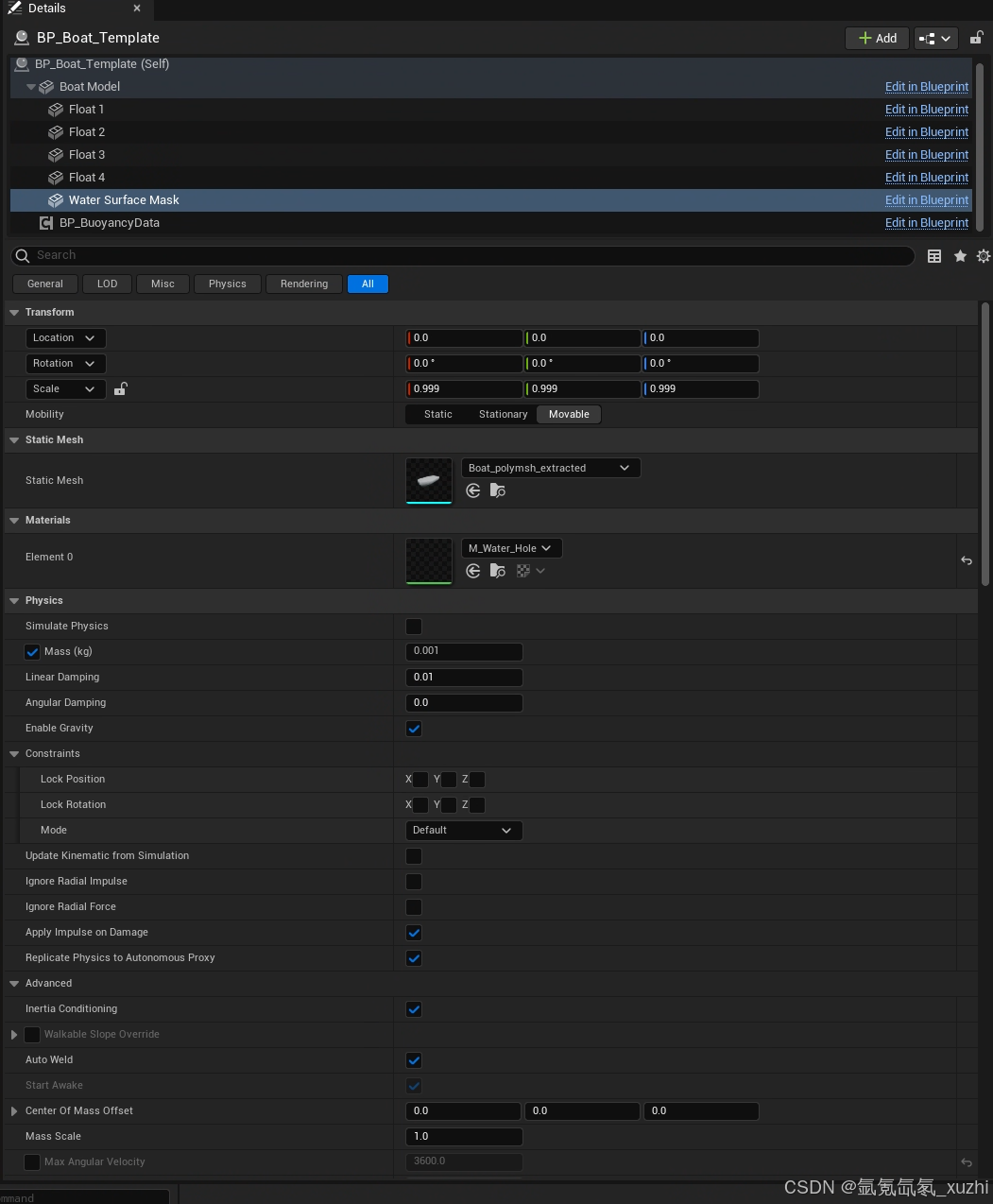
在你的截图中(BP_Boat_Template 的 Water Surface Mask):
| 参数位置 | 说明 |
|---|---|
| Mobility = Movable | 水面掩码会随 Actor 移动,可对局部水域实时采样。 |
| Simulate Physics = OFF | 它不参与物理,只提供数据。 |
| Mass (kg) = 0.001 | 无意义,仅保留默认值。 |
| Linear Damping / Angular Damping | 对掩码本身无效,不会影响浮力。 |
| Enable Gravity = ON | 默认项,不会触发任何实际重力行为。 |
| Lock Position / Rotation | 全锁定,表示它不会被物理驱动。 |
| Material = M_Water_Hole | 对视觉贴图的取样材质(例如计算局部高度场)。 |
| Static Mesh = Boat_polyMesh_extracted | 实际用来限定掩码形状或采样范围的几何体。 |
✅ 简言之,它是一个“带水体材质的辅助组件”,负责让浮力算法知道“这一片区域的水面是什么样的”。
🧠 四、在 Waterline PRO 系统中的角色位置
[Waterline Ocean Actor] → 生成整片海洋波场(FFT / Gerstner)│▼
[Water Surface Mask] → 从波场采样局部高度贴图 + 法线信息│▼
[BP_BuoyancyData] → 读取 Mask 数据,计算每个浮筒入水深度│▼
[Boat Model (Rigid Body)] → AddForceAtLocation(浮力/阻尼/拖曳)
📘 对浮力蓝图而言,Water Surface Mask 就是它的“水面 API”:
- 提供连续变化的水面;
- 保证视觉与物理波浪同步;
- 让每个 Float 点知道“自己是在浪峰还是浪谷”。
🌊 五、为什么它要挂在船上(而不是海面上)
Waterline PRO 允许每个 Actor 拥有自己的 “局部水面采样器”。
这样当你在大场景中有多个船或漂浮物时:
- 每个物体能独立读取自己所在区域的水面数据;
- 避免全局 FFT 帧开销;
- 保证浮力计算只针对自身局部水域,提高效率。
⚠️ 注意:它不是“船体的一部分”,而是“水面查询器”。
通常跟随船体位置移动,对周围水面进行采样。
🪄 六、实战中常见调法
| 目标效果 | 处理方式 |
|---|---|
| 船体浮力和浪不同步 | 检查 Mask 是否正确引用主 Waterline Ocean |
| 船体只在静态水平面浮动 | 可关闭动态波场采样,固定返回 Z=0 水面 |
| 多船性能吃紧 | 每艘船用低分辨率 Mask 或共享采样器 |
| 视觉与浮力不同步 | 确认 Water Surface Mask 的 Render Target 与 Ocean 材质绑定一致 |
✅ 七、总结一句话
Water Surface Mask 是 Waterline PRO 中“负责告诉浮力算法水面在哪”的组件。
它实时从海浪贴图采样高度、法线、流向信息,
提供给 BuoyancyData 计算浮力。
它自身不参与物理,只是浮力计算与渲染系统的桥梁。