霍夫变换和基于时频脊线的汽车FMCW雷达干扰抑制——论文阅读
霍夫变换和基于时频脊线的汽车FMCW雷达干扰抑制
A. Gaur, S. Srirangarajan, P. -H. Tseng and K. -T. Feng, “Hough Transform and Time-Frequency Ridge-Based Interference Mitigation in Automotive FMCW Radars,” 2024 IEEE 99th Vehicular Technology Conference (VTC2024-Spring), Singapore, Singapore, 2024, pp. 1-7
随着FMCW雷达成为自动驾驶技术(ADAS)的关键组成部分,工作在76-81 GHz频段的雷达数量激增,导致雷达之间的相互干扰已成为一个亟待解决的重大挑战。这种干扰会提高噪声基底,导致漏检弱目标或误检“鬼影”目标,严重威胁行车安全。
现有的干扰管理方法主要分为两类:
- 信号与系统设计:通过设计新的发射波形、天线阵列或基于通信的协调方案来避免干扰,但这通常需要修改硬件或增加系统复杂性。
- 信号处理:在接收端通过算法减轻干扰,无需改动硬件。
本文提出了一种新颖的、基于信号处理的框架,称为HTFR(Hough Transform and Time-Frequency Ridge)。
其核心思想是:在时频(T-F)域中,目标回波和干扰信号都表现为线条,但具有截然不同的斜率特性。
- 目标回波:在接收端混频后,表现为单音频率,在T-F谱上是平行于时间轴的水平线。
- 干扰信号:由于干扰雷达的啁啾斜率与本车雷达不同,混频后仍表现为啁啾信号(Chirp),在T-F谱上是有斜率的线。
HTFR算法利用这一显著差异,将T-F谱视为一幅图像,通过图像处理技术来智能地分离和减轻干扰。
信号模型与问题构建
理解该方法的前提是建立FMCW雷达的信号模型。
假设“受害”雷达发射的单个归一化啁啾信号 x(t)x(t)x(t) 其相位是时间的二次函数:
x(t)=exp[j2π(fot+12μt2)]x(t)=\exp[j2\pi(f_{o}t+\frac{1}{2}\mu t^{2})]x(t)=exp[j2π(fot+21μt2)]
其中 fof_ofo 是载波频率,μ\muμ 是啁啾斜率(μ=B/T\mu = B/Tμ=B/T,B是带宽,T是周期)。
1. 目标回波信号
来自 MMM 个目标的回波信号 xr(t)x_r(t)xr(t) 是发射信号的多个时延版本的叠加。对于第 mmm 个目标:
xr(t)=∑m=1Mαmexp[j2π(fo(t−τm)+12μ(t−τm)2)]x_{r}(t)=\sum_{m=1}^{M}\alpha_{m}\exp[j2\pi(f_{o}(t-\tau_{m})+\frac{1}{2}\mu(t-\tau_{m})^{2})]xr(t)=m=1∑Mαmexp[j2π(fo(t−τm)+21μ(t−τm)2)]
其中 αm\alpha_mαm 是复振幅,τm\tau_mτm 是传播延迟,τm=2(Rm+Vmt)c\tau_{m} = \frac{2(R_{m}+V_{m}t)}{c}τm=c2(Rm+Vmt),它同时包含了目标的距离 RmR_mRm 和速度 VmV_mVm。
2. 干扰信号
假设存在 QQQ 个干扰雷达,它们组合的干扰信号 xint(t)x_{int}(t)xint(t) 为:
xint(t)=∑q=1Qαqexp[j2π(fq(t−τq′)+12βq(t−τq′)2)]x_{int}(t)=\sum_{q=1}^{Q}\alpha_{q}\exp[j2\pi(f_{q}(t-\tau_{q}^{\prime})+\frac{1}{2}\beta_{q}(t-\tau_{q}^{\prime})^{2})]xint(t)=q=1∑Qαqexp[j2π(fq(t−τq′)+21βq(t−τq′)2)]
这些干扰雷达具有不同的载频 fqf_qfq 和(关键)不同的啁啾斜率 βq\beta_qβq。
3. 拍频信号 (Beat Signal)
在雷达接收端,总信号 r(t)=xr(t)+xint(t)r(t) = x_r(t) + x_{int}(t)r(t)=xr(t)+xint(t)。接收机将其与发射信号的共轭 x∗(t)x^*(t)x∗(t) 进行混频(解啁啾),得到拍频信号 rb(t)r_b(t)rb(t):
rb(t)=[xr(t)+xint(t)]⋅x∗(t)=xb(t)+xb,int(t)r_{b}(t)=[x_{r}(t)+x_{int}(t)]\cdot x^{*}(t) = x_{b}(t)+x_{b,int}(t)rb(t)=[xr(t)+xint(t)]⋅x∗(t)=xb(t)+xb,int(t)
经过混频后,目标拍频信号 xb(t)x_b(t)xb(t)(在忽略极小的 τm2\tau_m^2τm2 项后)简化为:
xb(t)≈∑m=1Mαm′exp[j2π(−foτm−μtτm)]x_{b}(t) \approx \sum_{m=1}^{M}\alpha_{m}^{\prime}\exp[j2\pi(-f_{o}\tau_{m}-\mu t\tau_{m})]xb(t)≈m=1∑Mαm′exp[j2π(−foτm−μtτm)]
这是一个关键结果:目标信号 xb(t)x_b(t)xb(t) 是一组正弦信号(单音)的叠加。其频率 fb=−μτmf_b = -\mu\tau_mfb=−μτm,是一个常数(或随 ttt 缓慢变化,但仍是“线”),因此在T-F谱上表现为水平线。
而干扰拍频信号 xb,int(t)x_{b,int}(t)xb,int(t) 则变为:
xb,int(t)=∑q=1Qαq′exp[j2π((fq−fo)t+12(βq−μ)t2)]x_{b,int}(t)=\sum_{q=1}^{Q}\alpha_{q}^{\prime}\exp[j2\pi((f_{q}-f_{o})t+\frac{1}{2}(\beta_{q}-\mu)t^{2})]xb,int(t)=q=1∑Qαq′exp[j2π((fq−fo)t+21(βq−μ)t2)]
这是另一个关键结果:由于干扰斜率 βq\beta_qβq 与本车斜率 μ\muμ 不同 (βq≠μ\beta_q \ne \muβq=μ),二次项 12(βq−μ)t2\frac{1}{2}(\beta_{q}-\mu)t^{2}21(βq−μ)t2 不会被消除。
这意味着干扰信号 xb,int(t)x_{b,int}(t)xb,int(t) 仍然是一个啁啾信号,其瞬时频率 finst(t)=(fq−fo)+(βq−μ)tf_{inst}(t) = (f_q-f_o) + (\beta_q-\mu)tfinst(t)=(fq−fo)+(βq−μ)t 是随时间 ttt 线性变化的,因此在T-F谱上表现为倾斜的线。
最终,信号经过一个截止频率为 fb,maxf_{b,max}fb,max 的低通滤波器 h(t)h(t)h(t),并混入加性高斯白噪声 η(t)\eta(t)η(t),得到最终的接收信号 r~b(t)\tilde{r}_{b}(t)r~b(t):
τ~b(t)=xb(t)∗h(t)+xb,int(t)∗h(t)+η(t)\tilde{\tau}_{b}(t)=x_{b}(t)*h(t) + x_{b,int}(t)*h(t) + \eta(t)τ~b(t)=xb(t)∗h(t)+xb,int(t)∗h(t)+η(t)
本文的目标就是从 r~b(t)\tilde{r}_{b}(t)r~b(t) 中高效地分离出 xb(t)x_b(t)xb(t)。
提出的 HTFR 算法流程
该算法(Algorithm 1)分为三个主要步骤,将信号处理与图像处理技术相结合。
A. 时频分析 (FSST)
算法的第一步是获取受污染信号 r~b(t)\tilde{r}_{b}(t)r~b(t) 的高分辨率时频(T-F)谱。本文没有使用传统的短时傅里叶变换(STFT),而是采用了傅里叶同步压缩变换(FSST)。
FSST的优势在于其“聚焦”特性。STFT会将能量分散在时间和频率上(模糊),而FSST通过“重排”STFT的系数,能将正弦波(即我们的目标信号)在T-F谱上锐化为能量集中的、清晰的水平线。
FSST的计算是 STFT 的一种“重排”:
-
首先计算信号 r~b(t)\tilde{r}_{b}(t)r~b(t) 的 STFT:
Zr~b(t)f(t,ω)=∫Rr~b(τ)f∗(τ−t)e−jωτdτZ_{\tilde{r}_{b}(t)}^{f}(t,\omega)=\int_{\mathbb{R}}\tilde{r}_{b}(\tau)f^{*}(\tau-t)e^{-j\omega\tau}d\tauZr~b(t)f(t,ω)=∫Rr~b(τ)f∗(τ−t)e−jωτdτ
-
然后,计算 STFT 的“质心”(瞬时频率估计):
ω^r~b(t)(t,ω)=ω−ℑ {Zr~b(t) f′(t,ω)Zr~b(t) f(t,ω)} \hat{\omega}_{\tilde r_b(t)}(t,\omega) = \omega - \Im\!\left\{\frac{ Z_{\tilde r_b(t)}^{\,f'}(t,\omega) }{ Z_{\tilde r_b(t)}^{\,f}(t,\omega) } \right\} ω^r~b(t)(t,ω)=ω−ℑ⎩⎨⎧Zr~b(t)f(t,ω)Zr~b(t)f′(t,ω)⎭⎬⎫
- 最后,通过将 STFT 能量 ZZZ 重新分配到其质心 ω^\hat{\omega}ω^ 位置,得到高分辨率的 FSST 谱 λb(t,ω)\lambda_{b}(t,\omega)λb(t,ω)。
B. 干扰检测 (Hough 变换)
获得T-F谱后,算法将其视为一幅图像,并开始应用图像处理技术。
- 边缘检测 :首先使用 Canny 边缘检测器 从T-F谱图像中提取边缘,得到 E(x,y)E(x,y)E(x,y)。边缘检测本身不足以定位清晰的线条,它通常只输出一堆离散的短线。
- 霍夫变换 (HT) :对边缘图像 E(x,y)E(x,y)E(x,y) 应用霍夫变换。HT 是一种强大的技术,擅长在噪声中检测不连续的直线。它通过一个极坐标变换,将 (x,y)(x, y)(x,y) 图像空间中的一条线映射到 (ρ,θ)(\rho, \theta)(ρ,θ) 霍夫参数空间中的一个点:
ρ=xcosθ+ysinθ\rho=x \cos \theta+y \sin \thetaρ=xcosθ+ysinθ
其中 ρ\rhoρ 是原点到直线的垂直距离,θ\thetaθ 是该垂直线与x轴的夹角。 - 斜率滤波 :这是区分目标和干扰的核心。在T-F谱图像中(时间为x轴,频率为y轴):
- 目标(水平线)对应 θ=90∘\theta=90^{\circ}θ=90∘。
- 干扰(倾斜的啁啾线)对应 θ≠90∘\theta \ne 90^{\circ}θ=90∘。
- 生成掩码 :算法通过识别所有 θ≠90∘\theta \ne 90^{\circ}θ=90∘ 的线来生成一个干扰掩码 Em(x,y)E_m(x,y)Em(x,y)。
C. 时频脊重建
最简单粗暴的方法是直接用这个掩码将T-F谱中的干扰样本“置零”。但这种“硬置零”操作存在一个严重问题:如果目标和干扰在时频上重叠(即线条交叉),那么置零操作也会擦除有用的目标回波信号,导致目标功率损失和检测性能下降。
为了解决这个问题,本文提出使用时频脊(Time-Frequency Ridge)重建这一巧妙的步骤。
- 初步置零:首先,使用 B 步骤中的干扰掩码 EmE_mEm 对T-F谱进行置零操作,得到 R^b,z(t,ω)\hat{R}_{b,z}(t,\omega)R^b,z(t,ω)。此时干扰消失了,但目标线也变得“残缺不全”。
- 提取时频脊:在置零后的T-F谱上,算法使用“带惩罚的前向-后向贪心算法” 提取能量的主脊(ridge)。这些“脊”代表了剩余的目标信号“骨架”(即瞬时频率的轨迹)。该算法通过最小化一个代价函数来提取脊:
Wridge(t)=min−ln∣R^b,z(t,ω)∣W_{ridge}(t)=\min - \ln |\hat{R}_{b,z}(t, \omega) |Wridge(t)=min−ln∣R^b,z(t,ω)∣
该算法会惩罚频率跳变,确保提取出的“脊”是连续的。 - 信号恢复(关键):算法并不使用这个残缺的“脊”作为最终结果。而是利用这些提取出的“脊”的索引(位置),返回到步骤1之前
的、原始的、未置零的T-F谱中,精确地将在这些“脊”位置的完整信号幅度提取出来。 - 逆变换:最后,对这个重建后的、干净的T-F谱应用逆 FSST(ifsst),得到时域中已减轻干扰的信号 r^b(t)\hat{r}_{b}(t)r^b(t)。
在实现上,该算法使用MATLAB函数 fsst, hough, houghpeaks, houghlines 和 tfridge 来完成。
性能评估与结果
作者通过仿真验证了 HTFR 算法的性能,并与三种SOTA(state-of-the-art)方法进行了比较:ANC, SPARKLE, 和 WD (小波去噪)。
仿真参数
- 雷达参数 (Table I) :载频 77 GHz, 带宽 540 MHz, 啁啾周期 45 μs, 采样率 22 MHz。
- 目标设置 :4个目标。R=[10,16,30,50]R=[10, 16, 30, 50]R=[10,16,30,50] m, V=[10,5,−5,0]V=[10, 5, -5, 0]V=[10,5,−5,0] m/s。
- 干扰设置 :2个干扰雷达。Q=2Q=2Q=2, β1=1.5μ\beta_1=1.5\muβ1=1.5μ, β2=2μ\beta_2=2\muβ2=2μ。
评估指标
使用输出信干噪比 (SINROSINR_OSINRO) 和相关系数 (σ\sigmaσ) 。两者都是越高越好。
SINRO=20log10∣∣xb∣∣2∣∣xb−r^b∣∣2SINR_{O}=20 \log 10 \frac{||x_{b}||_{2}}{||x_{b}-\hat{r}_{b}||_{2}}SINRO=20log10∣∣xb−r^b∣∣2∣∣xb∣∣2
σ=xbHr^b∣∣xb∣∣2⋅∣∣r^b∣∣2\sigma=\frac{{x_{b}}^{H}\hat{r}_{b}}{||x_{b}||_{2}\cdot||\hat{r}_{b}||_{2}}σ=∣∣xb∣∣2⋅∣∣r^b∣∣2xbHr^b
HTFR 算法步骤图示 (图 1)
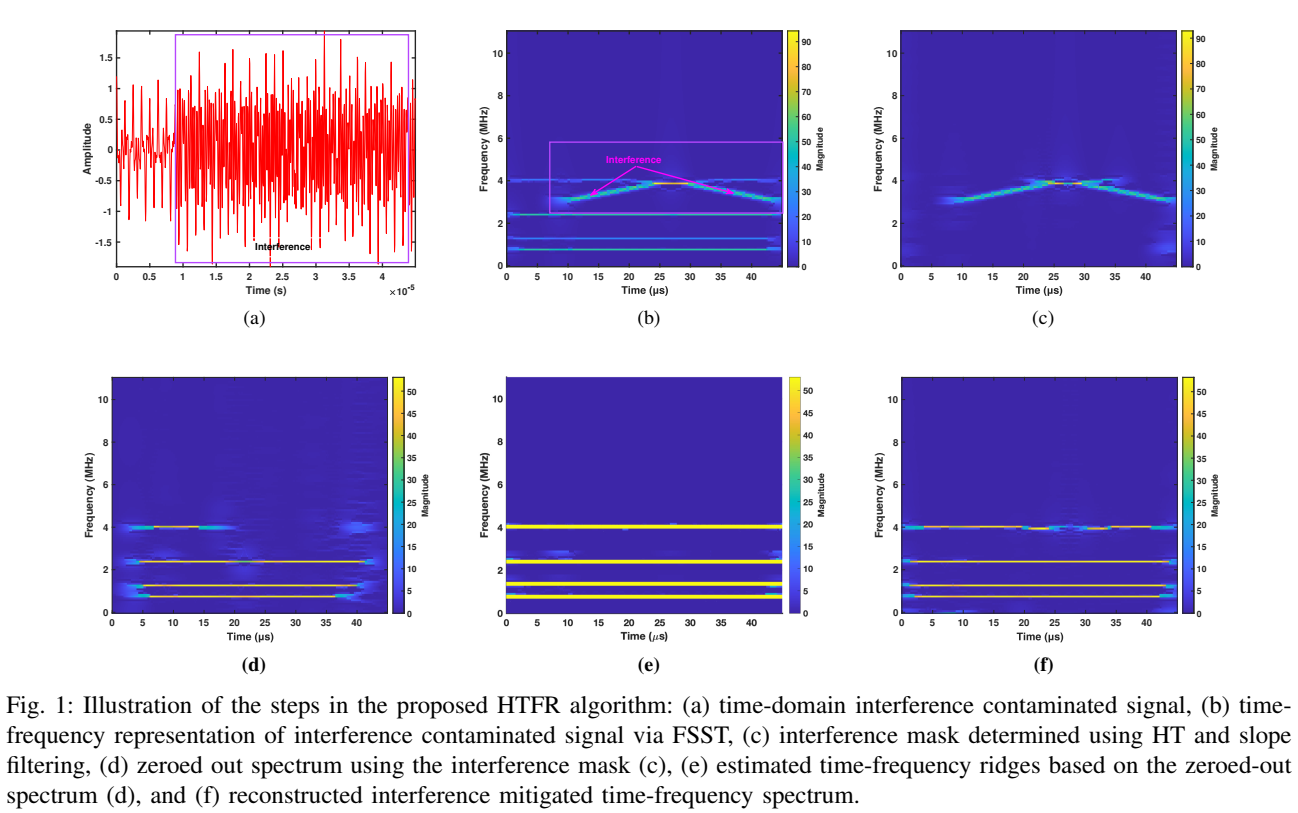
图 1 直观地展示了整个 HTFR 的处理流程:
- (a) 时域受污染信号 :显示了原始信号,其中约80%被干扰覆盖,输入SINR仅为 -4.78 dB。
- (b) 原始T-F谱 (FSST) :清晰地显示了四个水平线(目标) 和两个交叉的斜线(干扰,高亮框内)。
- © 干扰掩码 :由HT和斜率滤波生成的掩码,仅包含斜线(干扰)。
- (d) 置零后的T-F谱 :应用©掩码后,干扰被移除,但目标线也出现了断点(功率损失)。
- (e) 提取时频脊 :在(d)的基础上提取出的目标信号“骨架”(黄线)。
- (f) 重建后的T-F谱 :利用(e)的脊索引,从(b)中恢复目标信号。结果显示,干扰被完全抑制,而四个目标线被完美重建。
方法对比 (图 2, 图 4, 表 II)
图 2:距离剖面图
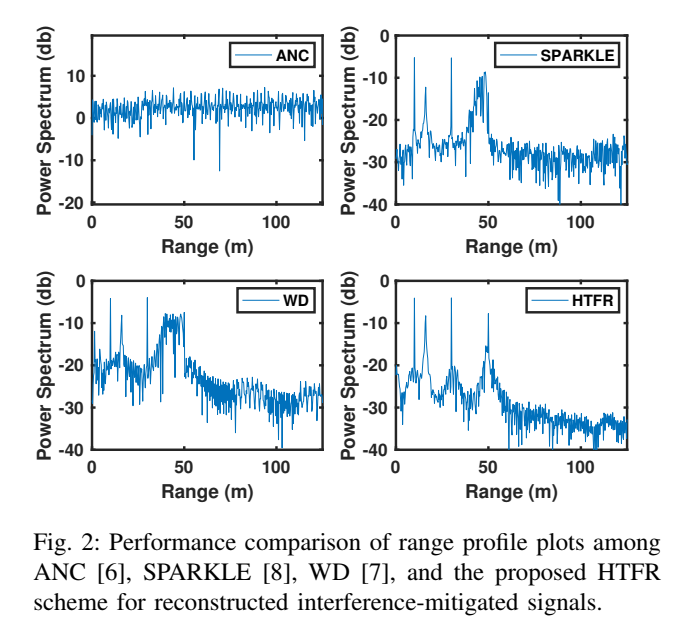
此图显示了不同方法处理后信号的距离维FFT结果。
- HTFR(右下)准确地检测到了全部四个目标峰值,且噪声基底非常低。
- SPARKLE(右上)在50m处有明显的残余干扰。
- ANC(左上)和 WD(左下)性能较差,目标峰值被噪声和残余干扰淹没。
图 4:距离-多普勒图
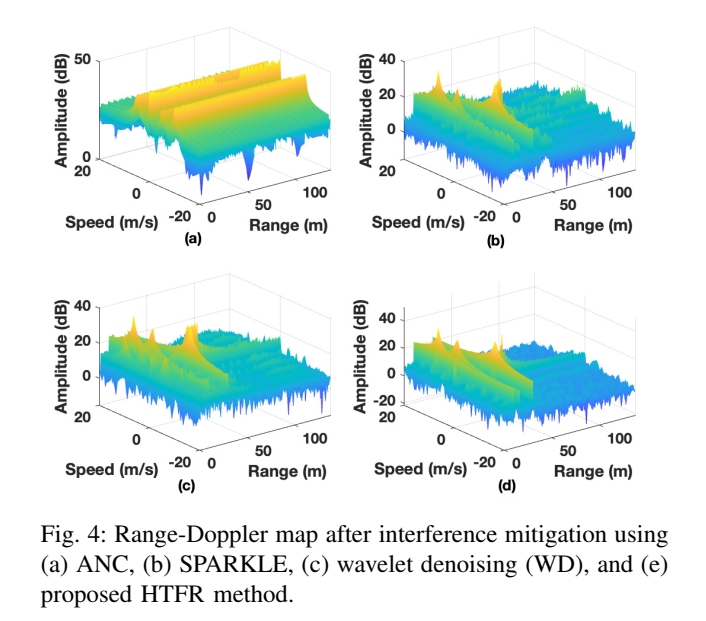
在R-D图上,HTFR(d)同样表现最好,四个目标清晰可见。而 SPARKLE 和 WD(b, c)由于干扰残留,导致50m处的目标无法被检测。ANC(a)性能最差,目标完全不可见。
表 II:定量性能对比
这张表提供了数据(测试平台:Apple M1, 8GB RAM):
| 方法 | 输出 SINROSINR_OSINRO (dB) | 相关系数 (σ\sigmaσ) | CPU 时间 (s) |
|---|---|---|---|
| ANC | -6.5427 | 0.0072 | 0.02 |
| SPARKLE | 5.2731 | 0.8392 | 1.61 |
| WD | 0.8792 | 0.7324 | 0.29 |
| HTFR (本文) | 14.5351 | 0.9823 | 0.13 |
结果非常明显:
- 性能:HTFR 在 SINROSINR_OSINRO (14.53 dB) 和相关系数 (0.9823) 两个指标上均显著优于所有其他方法。
- 效率:HTFR (0.13秒) 的计算速度比 SPARKLE (1.61秒) 和 WD (0.29秒) 更快。虽然 ANC 最快 (0.02秒),但其性能几乎无效。这表明 HTFR 具有实时处理的潜力。
抗噪声性能 (图 3)
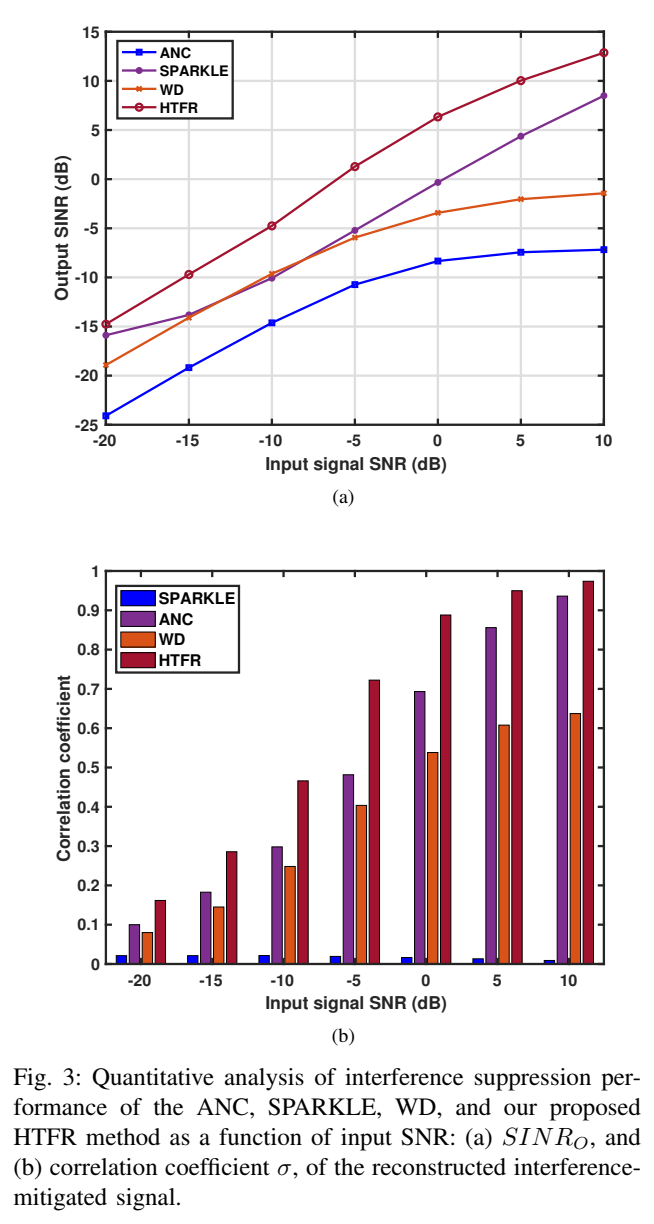
作者还测试了不同输入信噪比(SNR)下的性能。图 3 (a) 和 (b) 显示,在-20 dB到10 dB的所有SNR区间内,HTFR(红线)的输出SINR和相关系数始终全面高于其他三种方法。
结论
本文提出了一种用于FMCW雷达干扰抑制的 HTFR 算法。该方法巧妙地将在T-F谱上区分目标(水平线)和干扰(斜线)的问题,转化为了一个图像处理问题。它利用霍夫变换和斜率滤波来识别干扰,并创新性地使用时频脊重建来恢复被干扰掩盖的目标信号,避免了传统“置零”方法带来的目标功率损失。
仿真结果表明,HTFR 无论是在输出SINR、相关系数,还是在距离-多普勒图的直观检测上,均显著优于ANC、SPARKLE和WD等SOTA方法,同时保持了较高的计算效率,使其成为一种适用于自动驾驶雷达的、有前景的干扰抑制方案。
附录:数学推导
本文的核心前提是“目标是单音,干扰是啁啾”。这个结论在论文中是作为已知条件给出的。这里的附录将提供这一关键结论的推导。
推导1:目标回波 xb(t)x_b(t)xb(t) 为何是“单音”
我们从混频的相位开始推导。为简化,我们只考虑一个静止目标,其延迟为 τ=2Rc\tau = \frac{2R}{c}τ=c2R。
- 发射信号相位 ϕT(t)\phi_T(t)ϕT(t):
ϕT(t)=2π(fot+12μt2)\phi_T(t) = 2\pi(f_o t + \frac{1}{2}\mu t^2)ϕT(t)=2π(fot+21μt2) - 接收信号相位 ϕR(t)\phi_R(t)ϕR(t):
ϕR(t)=ϕT(t−τ)=2π(fo(t−τ)+12μ(t−τ)2)\phi_R(t) = \phi_T(t-\tau) = 2\pi(f_o (t-\tau) + \frac{1}{2}\mu (t-\tau)^2)ϕR(t)=ϕT(t−τ)=2π(fo(t−τ)+21μ(t−τ)2) - 混频(解啁啾):拍频信号 xb(t)x_b(t)xb(t) 的相位 ϕb(t)\phi_b(t)ϕb(t) 是接收相位与发射相位共轭(即负相位)之和:
ϕb(t)=ϕR(t)−ϕT(t)\phi_b(t) = \phi_R(t) - \phi_T(t)ϕb(t)=ϕR(t)−ϕT(t)
ϕb(t)=2π[(fo(t−τ)+12μ(t−τ)2)−(fot+12μt2)]\phi_b(t) = 2\pi [ (f_o (t-\tau) + \frac{1}{2}\mu (t-\tau)^2) - (f_o t + \frac{1}{2}\mu t^2) ]ϕb(t)=2π[(fo(t−τ)+21μ(t−τ)2)−(fot+21μt2)] - 展开与化简:
ϕb(t)=2π[(fot−foτ+12μ(t2−2tτ+τ2))−fot−12μt2]\phi_b(t) = 2\pi [ (f_o t - f_o \tau + \frac{1}{2}\mu(t^2 - 2t\tau + \tau^2)) - f_o t - \frac{1}{2}\mu t^2 ]ϕb(t)=2π[(fot−foτ+21μ(t2−2tτ+τ2))−fot−21μt2]
我们消去 fotf_o tfot 和 12μt2\frac{1}{2}\mu t^221μt2 项:
ϕb(t)=2π[−foτ−μtτ+12μτ2]\phi_b(t) = 2\pi [ -f_o \tau - \mu t \tau + \frac{1}{2}\mu \tau^2 ]ϕb(t)=2π[−foτ−μtτ+21μτ2] - 瞬时频率:频率是相位的导数。我们对 ϕb(t)\phi_b(t)ϕb(t) 求导,得到瞬时拍频 fb(t)f_b(t)fb(t):
fb(t)=12πdϕb(t)dt=12πddt(2π[−foτ−μtτ+12μτ2])f_b(t) = \frac{1}{2\pi} \frac{d\phi_b(t)}{dt} = \frac{1}{2\pi} \frac{d}{dt} ( 2\pi [ -f_o \tau - \mu t \tau + \frac{1}{2}\mu \tau^2 ] )fb(t)=2π1dtdϕb(t)=2π1dtd(2π[−foτ−μtτ+21μτ2])
fb(t)=−μτf_b(t) = -\mu \taufb(t)=−μτ - 结论:拍频 fbf_bfb 是一个常数(因为它只取决于 μ\muμ 和 τ\tauτ,这两者都是常数)。这证明了目标回波在混频后是一个单音(或正弦)信号,在T-F谱上表现为一条水平线。
注:式中的 −foτ-f_o \tau−foτ 是初始相位,12μτ2\frac{1}{2}\mu \tau^221μτ2 是“残余视频相位”,通常很小。如果目标在移动,τ\tauτ 会随 ttt 变化(τ(t)=2(Rm+Vmt)c\tau(t) = \frac{2(R_m+V_m t)}{c}τ(t)=c2(Rm+Vmt)),此时 fb(t)f_b(t)fb(t) 会额外包含一个多普勒项 2foVmc\frac{2 f_o V_m}{c}c2foVm 和一个很小的斜率项,但其主要成分 μτ\mu\tauμτ 仍然是常数,因此仍被视为“水平线”。
推导2:干扰信号 xb,int(t)x_{b,int}(t)xb,int(t) 为何是“啁啾”
现在我们考虑本车雷达混频器 x∗(t)x^*(t)x∗(t) 混入了一个干扰信号 xint(t)x_{int}(t)xint(t)。
-
本车LO(混频)相位 ϕLO(t)\phi_{LO}(t)ϕLO(t):
ϕLO(t)=−ϕT(t)=−2π(fot+12μt2)\phi_{LO}(t) = -\phi_T(t) = -2\pi(f_o t + \frac{1}{2}\mu t^2)ϕLO(t)=−ϕT(t)=−2π(fot+21μt2) -
干扰信号相位 ϕint(t)\phi_{int}(t)ϕint(t):(为简化,忽略延迟 τ′\tau'τ′)
ϕint(t)=2π(fqt+12βqt2)\phi_{int}(t) = 2\pi(f_q t + \frac{1}{2}\beta_q t^2)ϕint(t)=2π(fqt+21βqt2) -
干扰拍频相位 ϕb,int(t)\phi_{b,int}(t)ϕb,int(t):
ϕb,int(t)=ϕint(t)+ϕLO(t)\phi_{b,int}(t) = \phi_{int}(t) + \phi_{LO}(t)ϕb,int(t)=ϕint(t)+ϕLO(t)
ϕb,int(t)=2π(fqt+12βqt2)−2π(fot+12μt2)\phi_{b,int}(t) = 2\pi(f_q t + \frac{1}{2}\beta_q t^2) - 2\pi(f_o t + \frac{1}{2}\mu t^2)ϕb,int(t)=2π(fqt+21βqt2)−2π(fot+21μt2) -
合并同类项:
ϕb,int(t)=2π[(fq−fo)t+12(βq−μ)t2]\phi_{b,int}(t) = 2\pi [ (f_q - f_o)t + \frac{1}{2}(\beta_q - \mu)t^2 ]ϕb,int(t)=2π[(fq−fo)t+21(βq−μ)t2] -
瞬时频率:对 ϕb,int(t)\phi_{b,int}(t)ϕb,int(t) 求导,得到瞬时干扰拍频 fb,int(t)f_{b,int}(t)fb,int(t):
fb,int(t)=12πdϕb,int(t)dtf_{b,int}(t) = \frac{1}{2\pi} \frac{d\phi_{b,int}(t)}{dt}fb,int(t)=2π1dtdϕb,int(t)
fb,int(t)=(fq−fo)+(βq−μ)tf_{b,int}(t) = (f_q - f_o) + (\beta_q - \mu)tfb,int(t)=(fq−fo)+(βq−μ)t -
结论:由于干扰雷达的斜率 βq\beta_qβq 与本车雷达的斜率 μ\muμ 几乎不可能相同(即 βq≠μ\beta_q \ne \muβq=μ),因此 (βq−μ)≠0(\beta_q - \mu) \ne 0(βq−μ)=0。
这意味着干扰拍频 fb,int(t)f_{b,int}(t)fb,int(t) 是一个随时间 ttt 线性变化的函数。这正是啁啾信号(Chirp)的定义。因此,干扰在T-F谱上表现为一条倾斜的线。