计算机图形学·11 变换(Transformations)
本文是记录专业课“计算机图形学”的部分笔记,参考教材为Angel的第八版交互式计算机图形学——基于WebGL 2.0的自顶向下方法。
1、所谓变换就是把点映射到其它点,把向量映射到其它向量。在一般连续变换、非线性变换中,直线的像不再是直线(直线的像是由直线上每个点的像构成的),而是一条连续曲线。或者我们可以说,当变换是连续一般变换时,直线的像就是一条连续曲线。
2、线性变换条件是f(αp+βq)=αf(p)+βf(q),满足可加性和齐次性,可以表示为矩阵相乘的形式v=AT u,具有二种形式(标架的变换,或顶点在同一个标架里的坐标变换)。而仿射变换(Affine Transformations)是具有线性不变性的变换,即先经系统再求和和先求和再经系统结果一样。
图形学中的重要性在于,此时我们只需要变换线段的两个端点,而由系统自动画出变换后两个端点间的线段。那么为什么需要变换?可以建模造型(如组合场景:从建模系统局部坐标到某个应用系统物理世界全局坐标)、构造三维场景、实现分形、实现观察与动画。
3、仿射变换的流水线实现如下图所示:
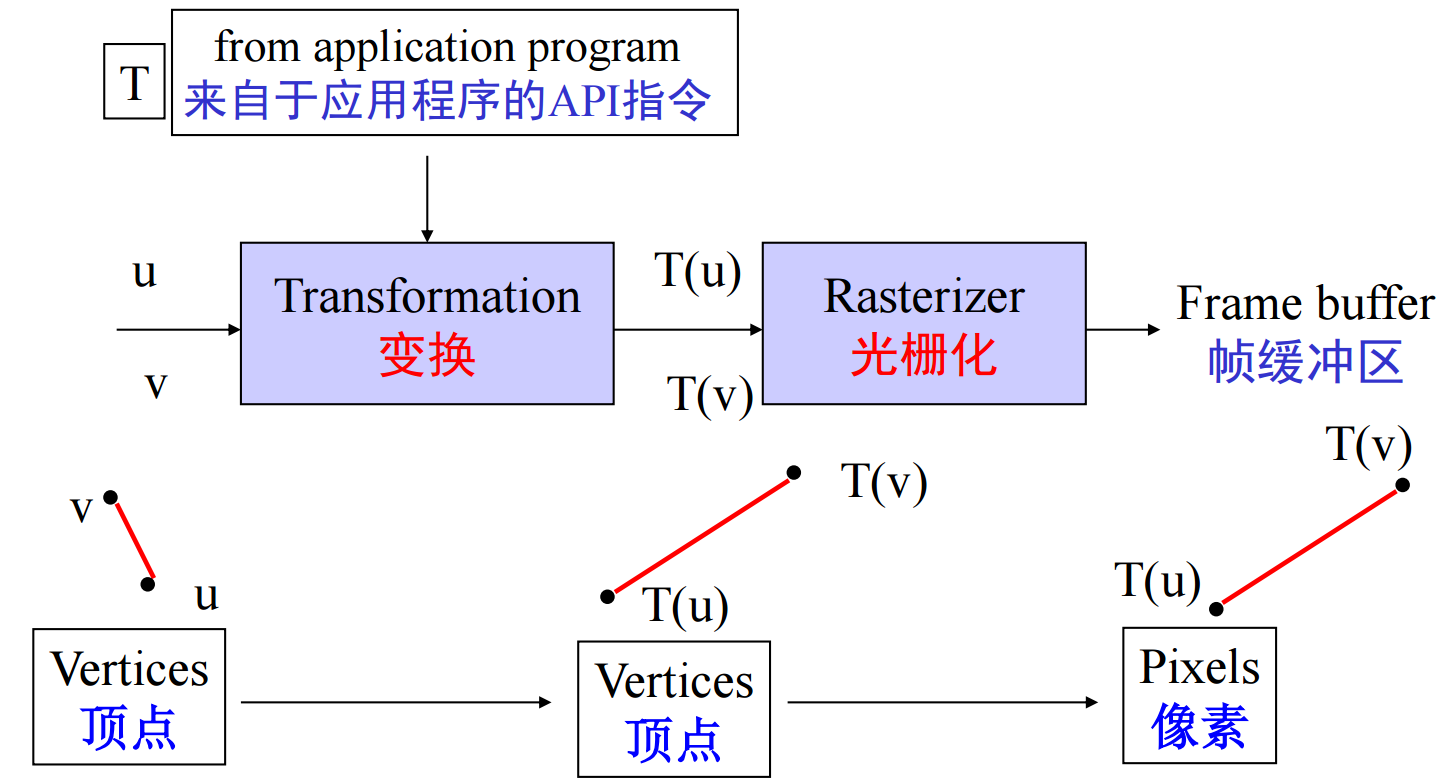
在后面的处理中,我们既会考虑变换的坐标无关的表示(满足物理要求),也会考虑变换在特定标架下的表示(满足计算要求)。
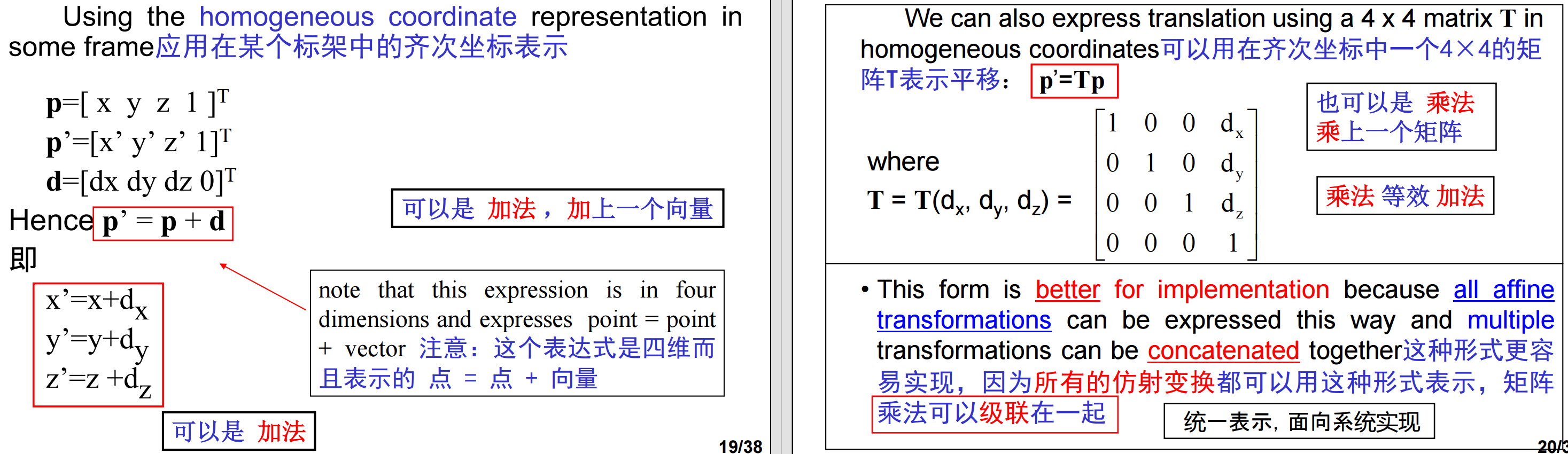
4、我们先来看平移(Translation)。简单来讲就是把一个点移到新的位置,平移量由一个向量d确定,具有三个自由度:P’ = P + d。一般来讲,我们直接把一个对象上的所有点沿同一向量平移。
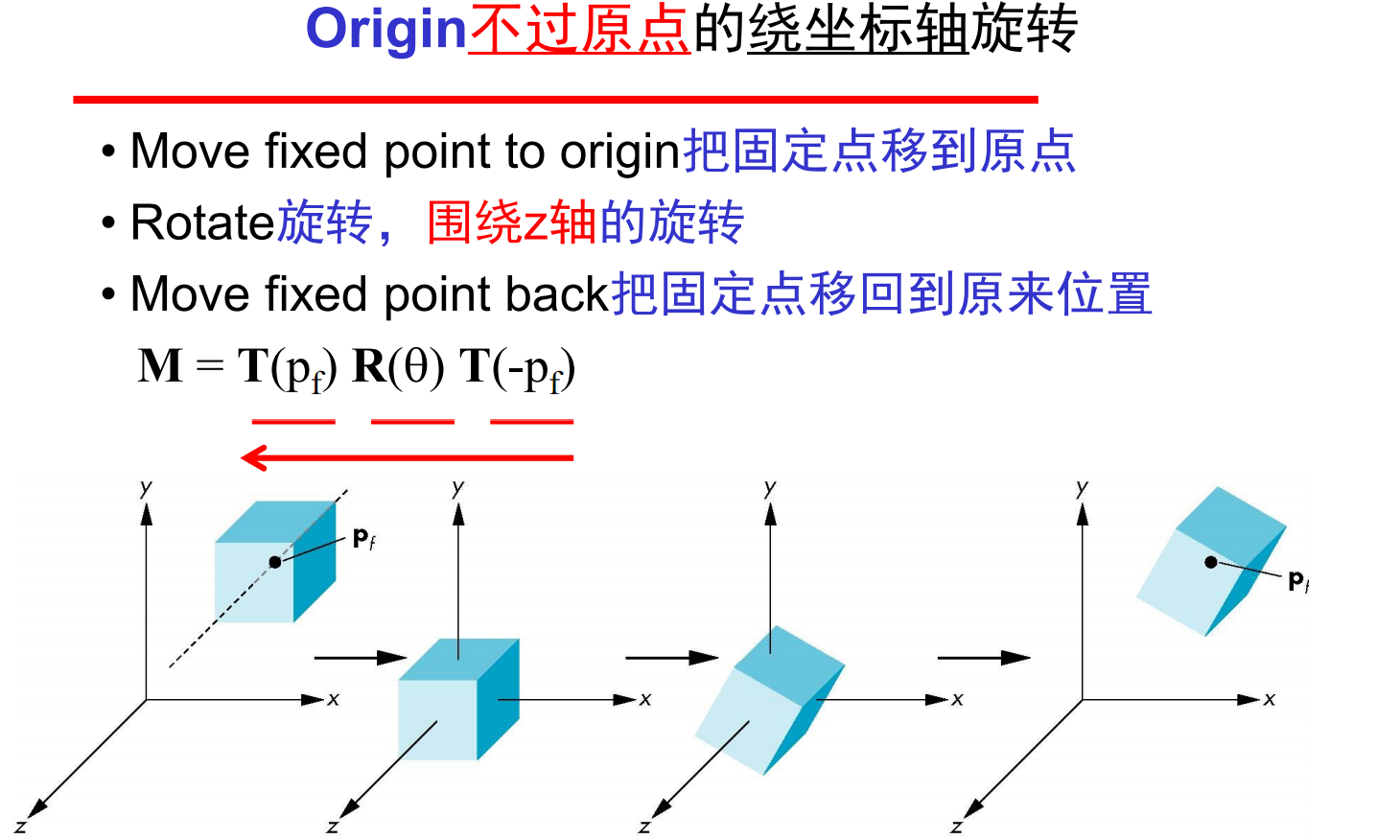
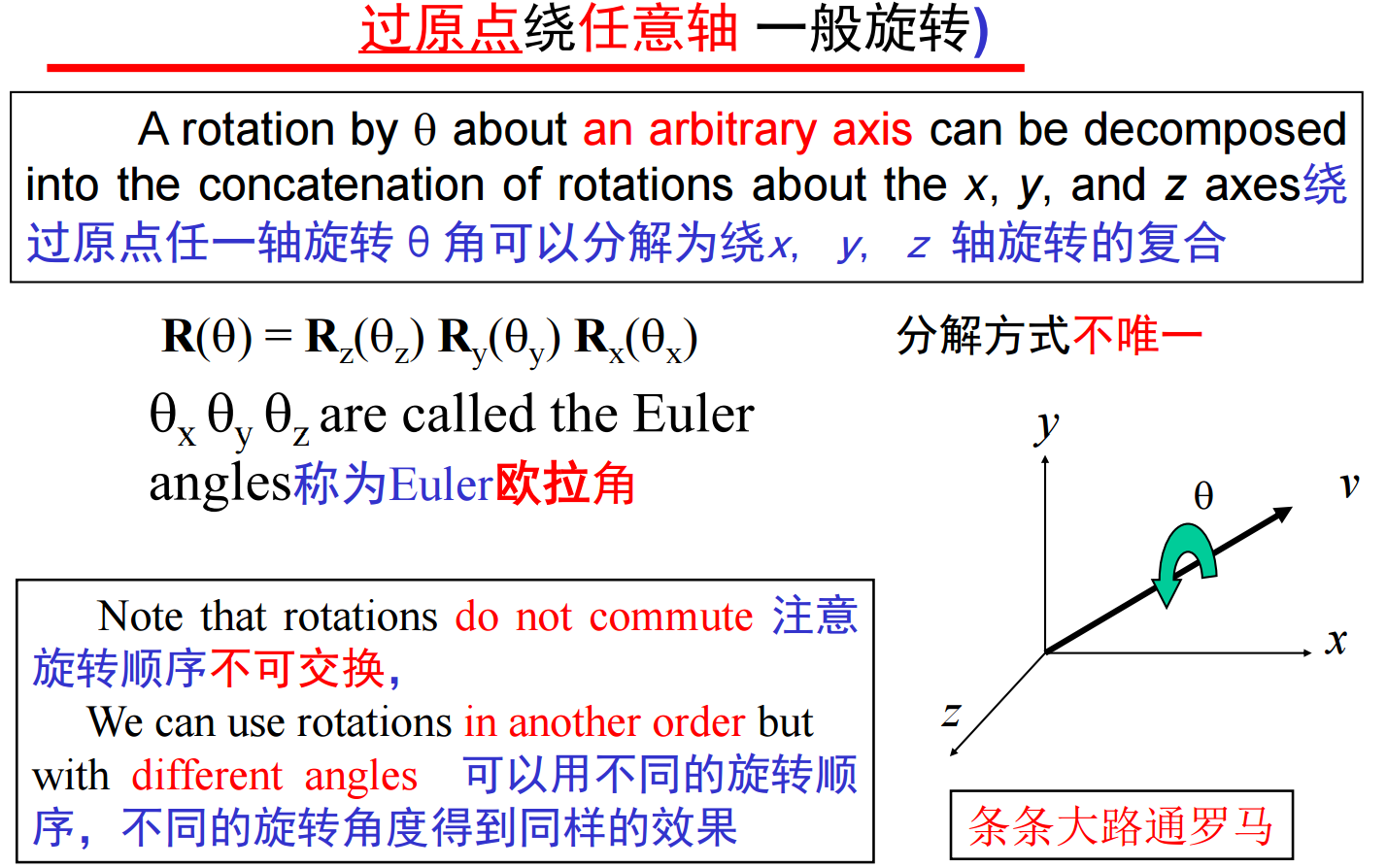
5、而对于旋转(Rotation),我们先考虑绕原点的二维旋转,比如说逆时针旋转即半径保持不变,角度增加了θ:
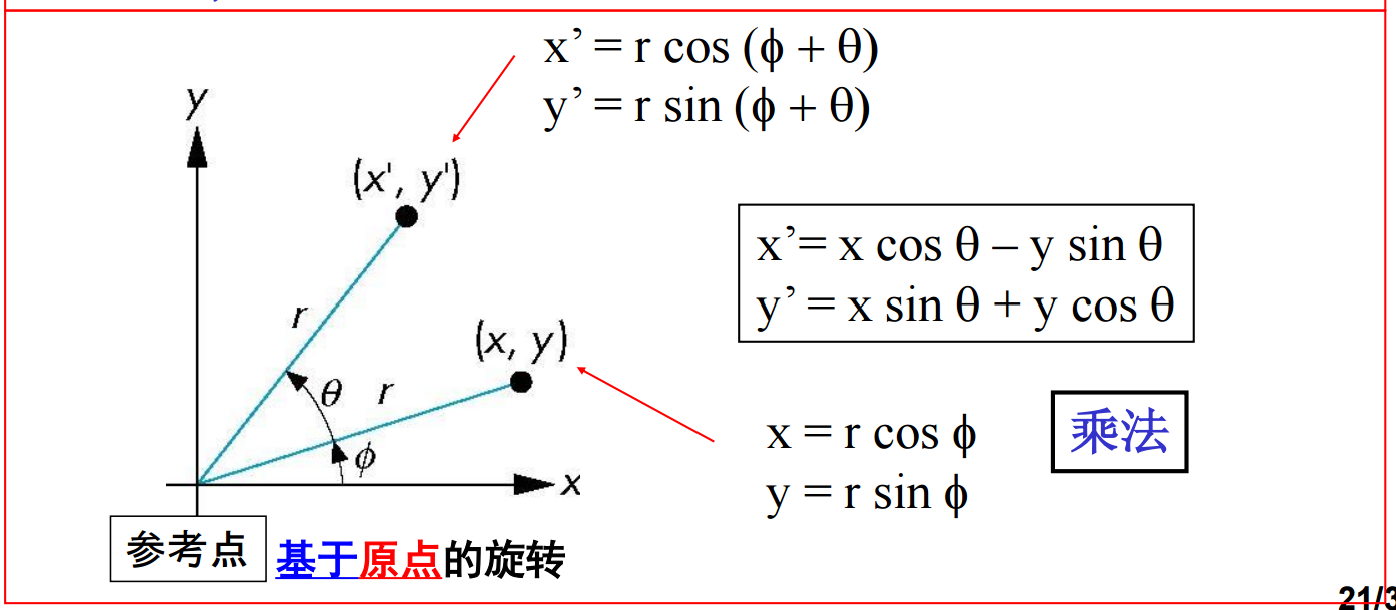
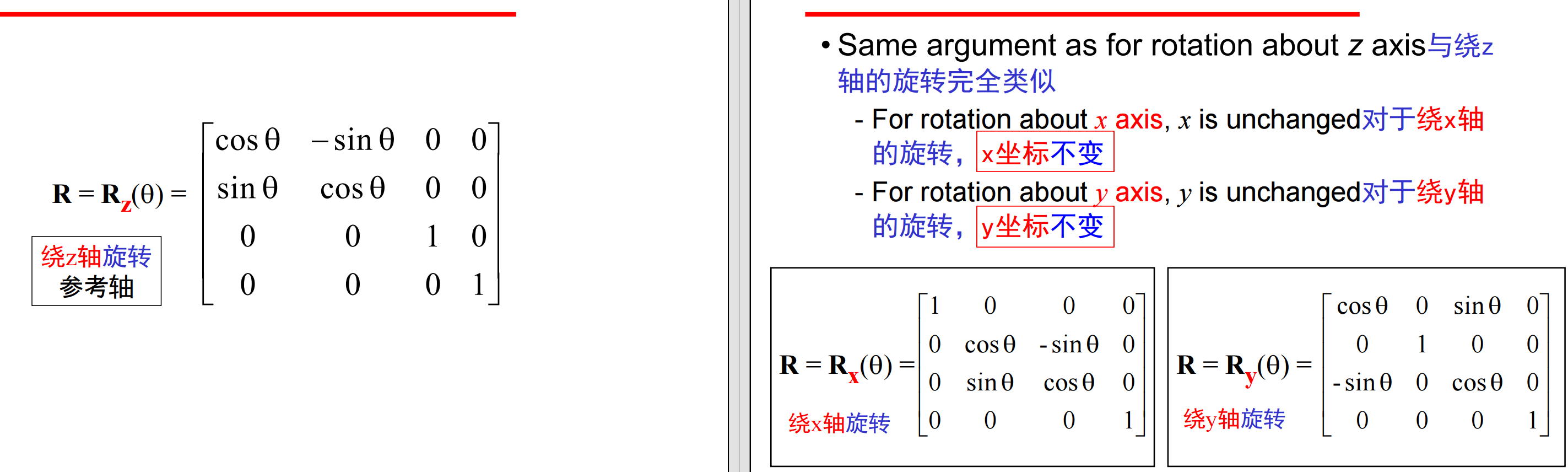
扩展到三维,考虑绕z轴旋转,点的z坐标不变,等价于在 z=常数的xy平面上进行二维旋转(x’=x cosθ –y sinθ、y’ = x sinθ + y cosθ、z’ =z),其齐次坐标表示为p’ = Rz (θ) p:
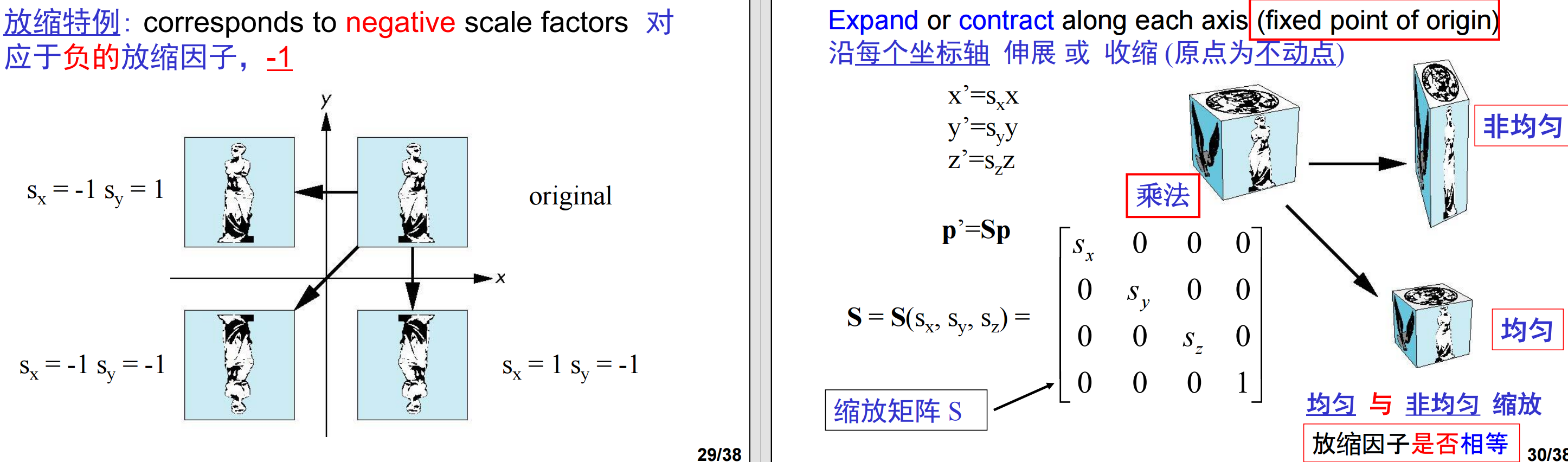
6、旋转与平移是两种刚体变换,这两种变换的复合只能改变对象的位置与定向;其他的仿射变换会改变对象的形状(如放缩、错切),但仍然是仿射变换(保持直线、保持比例、不保角度)。我们来看放缩(Scaling),放缩变换必有一个不动点,其由一个不动点、一个放缩方向以及沿该方向的放缩因子(scale factors)定义,当放缩因子大于1时对象在该方向上变长。
此外,虽然可以利用通用公式计算变换矩阵的逆,但根据几何意义可以直接给出各种变换矩阵的逆。如平移 T^-1(dx, dy, dz) = T(-dx, -dy, -dz) 、旋转R^-1(θ) = R(-θ) (注意到逆矩阵=转置矩阵)、放缩S^-1(sx, sy, sz) = S(1/sx, 1/sy, 1/sz)
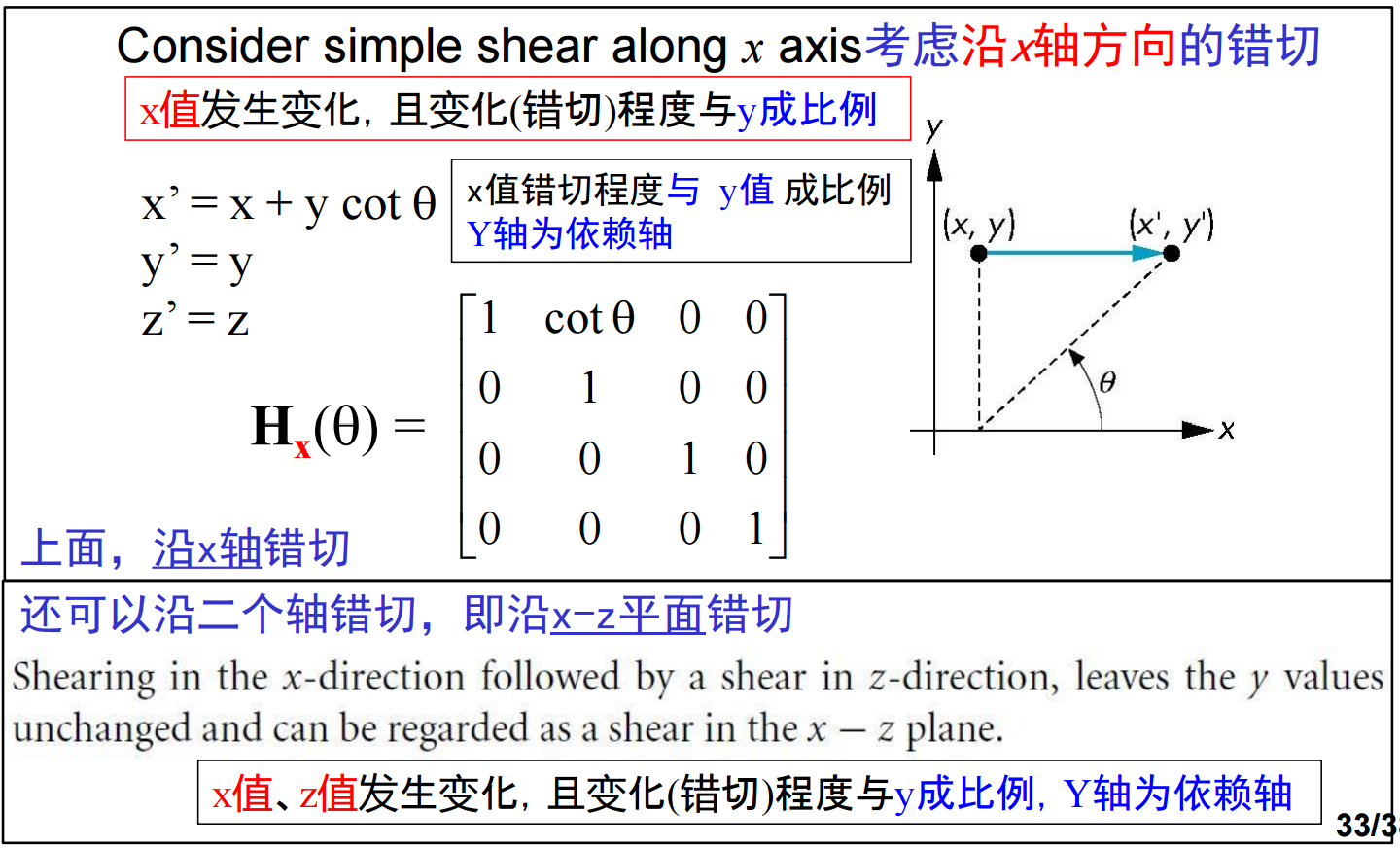
7、错切(Shear)是另外一种实用的基本变换,等价于把面向相反方向倾斜(可以想象成正方体的上平面被向右推,前侧面变成了平行四边形)。
8、仿射变换:平移、旋转、放缩、剪切、反射。我们可以通过把旋转、平移与放缩矩阵相乘,从而形成任意的仿射变换。由于对许多顶点应用同样的变换,因此构造矩阵M = ABCD的代价相比于对许多顶点p计算Mp的代价是很小的,难点在于如何构造出满足要求的变换矩阵。在变换矩阵中,注意,在右边的矩阵是首先被应用的矩阵,不可交换!