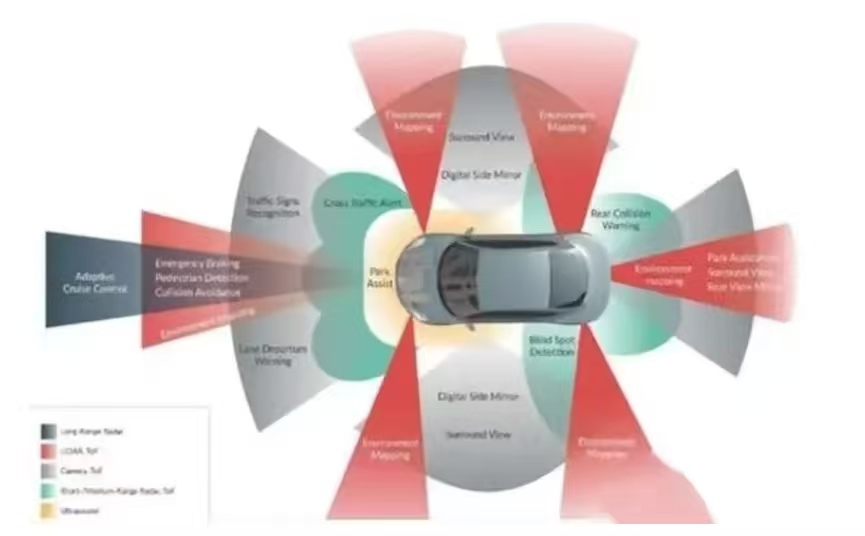
汽车智能驾驶 超声波雷达、毫米波雷达和激光雷达
1 超声波雷达(Ultrasonic Radar)
工作原理超声波雷达利用高频声波进行测量,通过发射超声波并接收反射回来的信号来检测物体的距离。
使用场景
超声波雷达主要用于室内导航、倒车雷达等短距离探测功能。因为超声波雷达对温度敏感,在雨雪天气或极寒环境下性能会受到影响。
精度
超声波雷达在近距离和低速行驶情况下表现较好,例如倒车雷达。

02 毫米波雷达(Millimeter Wave Radar)
毫米波雷达(Millimeter-wave Radar)是一种利用毫米波(波长在10-3米到10-2米之间)进行感知和探测的雷达技术。其工作频率高、波长短,对比传统雷达,具有更高的分辨率和穿透能力,适用于多种领域的目标检测和成像。
毫米波是微波的一个子频段。在汽车领域,使用的毫米波雷达主要在24G(24*10^9)Hz,77GHz和79GHz三个频段。
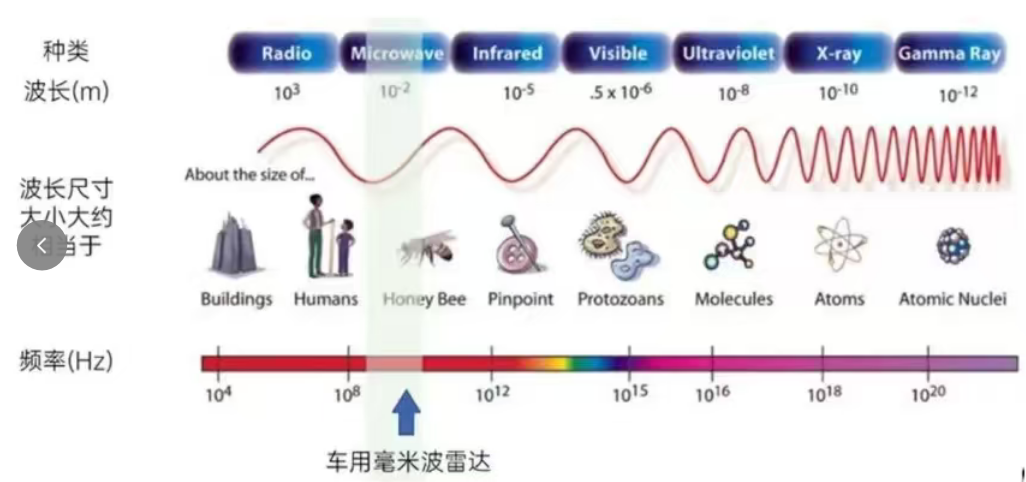
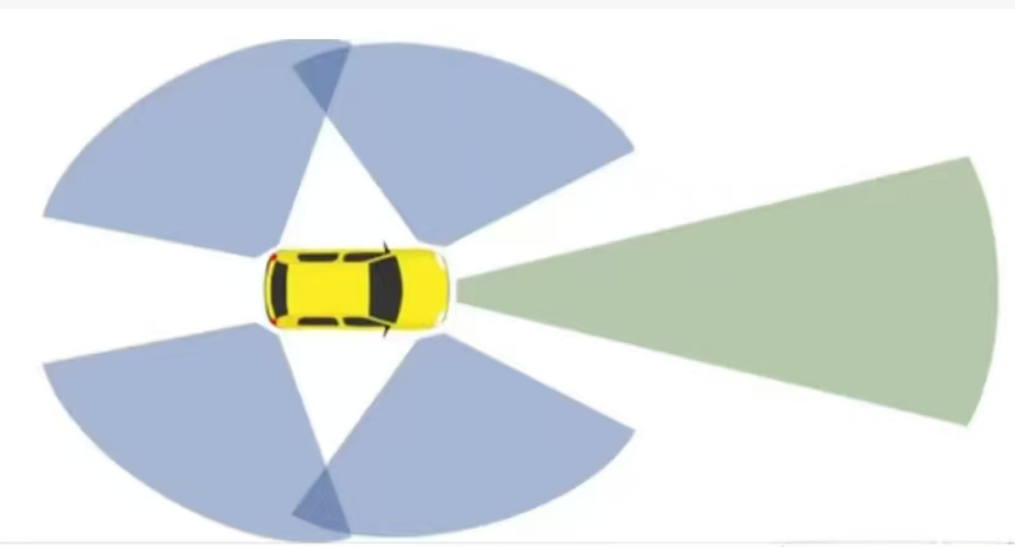
毫米波雷达工作频率越高,波长越短,分辨率就越高。与24GHz雷达相比,工作频率在76-81GHz的毫米波雷达的物体分辨准确度、测速和测距精确度都会进一步提高,能检测行人和自行车,且设备体积更小,更便于在车辆上安装和部署。通常将毫米波雷达安装在车辆正前方和四周,即角雷达和前向雷达。
特点
1)频段特性
毫米波是电磁波的一种,在频谱上处于微波和红外线之间,工作频率在30 GHz至300 GHz之间。这个频段的特性使得毫米波能够在大气吸收较小的情况下进行远距离探测和成像。
2)高分辨率
毫米波具有较短的波长,因此能够提供较高的分辨率,使其适合于目标识别和成像,尤其在细节方面有很好的表现。
3)穿透能力
毫米波在大气和某些材料中的穿透性较强,使其在不同环境中也能有效工作,比如雾、烟雨等天气条件下的成像。
工作原理
毫米波雷达使用毫米波频段的电磁波进行测量,通过发射毫米波信号并接收反射回来的信号来检测物体的距离、速度和方向。
使用场景
毫米波雷达具有良好的抗干扰能力,广泛应用于自适应巡航控制、碰撞预警、盲点监测等功能。
精度
毫米波雷达的测量精度通常高于超声波雷达,尤其是在远距离和高速行驶情况下。
03 激光雷达
激光雷达 (LiDAR) 是光探测与测距 (Light Detection and Ranging) 技术的缩写。以激光为工作光束。
激光雷达根据工作介质的不同,可以分为固体激光雷达、气体激光雷达和半导体激光雷达。固体激光雷达使用晶体作为激光发射介质,气体激光雷达则使用气体作为介质,而半导体激光雷达则使用半导体材料作为激光发射介质。不同的介质会影响激光的波长和功率,进而影响激光雷达的探测性能。

工作原理
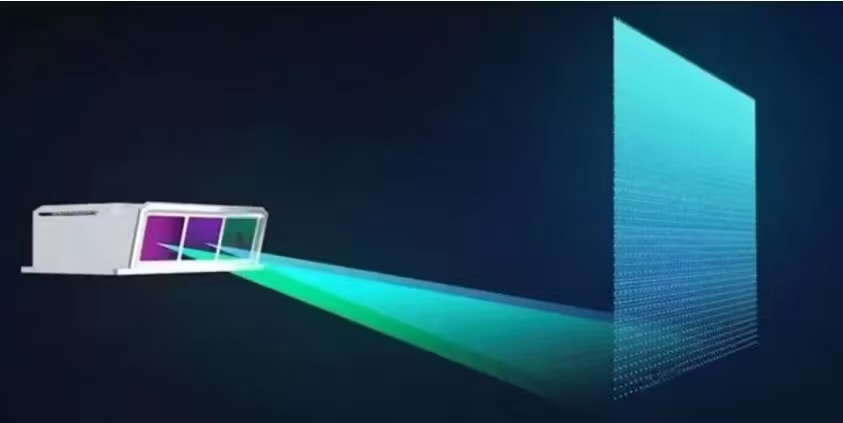
向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数。
激光发射器会不断向外发射激光束,光束在遇到障碍物后会反射,再通过接收传感器,接收物体反射回的光脉冲。根据已知光速(约为 30 万千米/秒)计算出两者信号之间的时间差、相位差来确定车与物体之间的相对距离,再通过水平旋转扫描或相控扫描测量物体的角度,再通过获取不同俯仰角度的信号,就可以获得世界的高度信息。
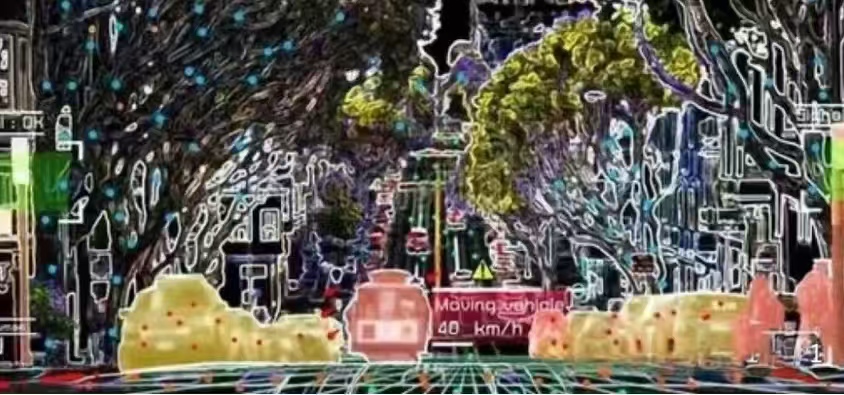
结合以上三种功能,激光雷达可以感知到与物体之间的距离以及角度,再通过软件算法去做 3D 建模,就能把我们人眼看到的真实世界做成一个机器能够理解的虚拟世界。
优点
激光雷达发出的是快速的激光脉冲,传播的距离较短,能精确计算出传感器到障碍物间的距离,还能探测目标物体的准确尺寸,并且它的穿透力极强,能够穿过雨、雾等极端天气,受干扰较小,跟人眼看到的东西很类似。缺点激光雷达比较容易受到自然光或是热辐射的影响,在自然光强烈或是辐射区域的时候,激光雷达将会被削弱很多。
激光雷达的造价成本高,对工艺水平要求也比较高。当前,量产激光雷达的成本已经做到500美元

激光雷达参
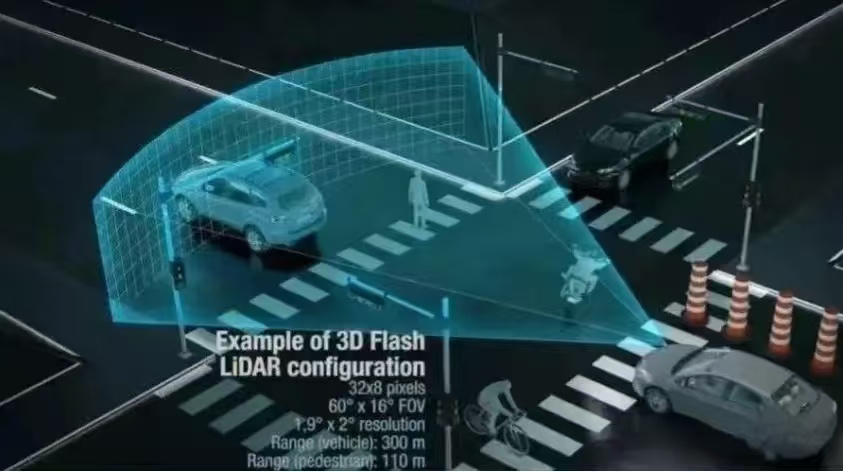
数车载激光雷达通过发射激光束来测量目标物的距离、速度等信息,从而为自动驾驶车辆提供精确的环境感知。
激光雷达其实就是激光探测及测距系统(LiDAR),是一套以发射激光束,并根据激光束反射回来的信号探测目标位置、速度等信息的装置。
车载激光雷达往往以横向或纵向扫描的方式工作。
波长
目前智驾车辆使用的激光雷达,就两种主要的波长:905nm 和 1550nm。1) 905nm激光雷达
目前市场上最流行的车载激光雷达波长。
优点
更高的功率、更低的成本、更小的尺寸和更轻的重量。在恶劣天气条件下(如雾、雨、雪等)具有较好的性能。
主要限制
对于较远的物体检测能力较差,因为随着距离的增加,信号会逐渐减弱。2)1550nm激光雷达
通常被用于更长距离的测量,如无人驾驶车辆在高速公路上行驶。
优点
具有更高的传输带宽和更强的抗干扰能力,使其更适合长距离通信。脉冲能量更高,使其能够更好地穿透雾和霾等恶劣天气条件。
缺点
1550nm波长的激光雷达通常比905nm波长的激光雷达更昂贵,并且对目标检测的分辨率较低。
激光雷达的FOV
FOV指激光雷达能够探测到的视场范围,可以从垂直和水平两个维度以角度来衡量范围大小。
垂直FOV:常见的车载激光雷达通常在25°,形状呈扇形;
水平FOV:常见的机械式激光雷达可以达到360°范围,通常布置于车顶;常见的车载半固态激光雷达通常可以达到120°范围,形状呈扇形,可布置于车身或车顶;
线数
对于 360° 旋转式和一维转镜式架构的激光雷达来说,有几组激光收发模块,垂直方向上就有几条线,被称为线数。这种情况下,线数就等同于激光雷达内部激光器的数量。通俗来讲,线数越高,激光器的数量就越多,激光雷达的综合性能也就越强大。对比不同线数激光雷达的点云效果,明显当激光雷达线数越多,能捕捉到的物体细节越丰富,也就是分辨率更高。128 线激光雷达形成的点云图明显更清晰,分辨率远远超过低线数激光雷达。

16线/128线/64线模拟点云效果示意
虽然线数越多,效果越好。但如果在一个激光雷达内部垂直堆积 128 组激光收发模块,将会导致激光雷达的体积非常庞大,而且成本极高,无法实现大规模量产。
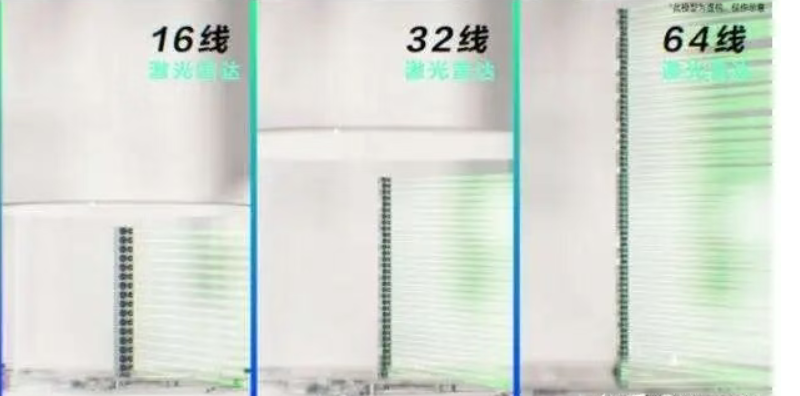
16线/32线/64线激光器堆叠效果示意
目前激光雷达行业最前沿的芯片化技术,已经能够将 128 组激光收发模块集成到几颗厘米级的芯片上。这样一来,一台“真 128 线”的激光雷达也可以变得十分小巧,轻松集成进车身了。
高线数激光雷达优点,
1)线数越多,看得越清。
比如,128 线的激光雷达扫描图案看起来整齐且清晰,而且全局都保持均匀的高分辨率。不论是汽车、行人,还是轮胎、锥桶等容易忽略的细节,都能被激光雷达准确完整地捕捉,确保驾驶系统做最准确的决策,避免危险的发生。
2)线数越多,越安全。
激光器数量越多,可以提供更高的安全冗余。因为 各个激光器独立工作,即便其中一个出现极小概率的失效问题,也不会对激光雷达的整体感知能力造成很大影响。因此,在 360° 旋转式和一维转镜式架构中,激光雷达的线数就等于激光器的数量,的确是越多越好。
