gazobo
启动
roscore
rosrun gazebo_ros gazebo
创建仿真环境和编写launch启动
Edit --》 build Editor 自己创建模型
File -》save
也可以添加官方提供的模型插件,需要下载
模型插件
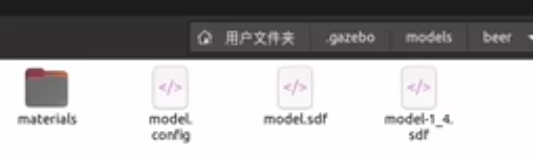
materials下有2个文件夹

自己创建的picture
model.config
关心name description
name改成和文件名字一样

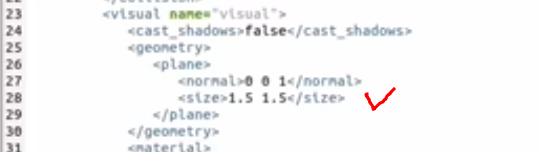
model.sdf
size size pose

保存结果

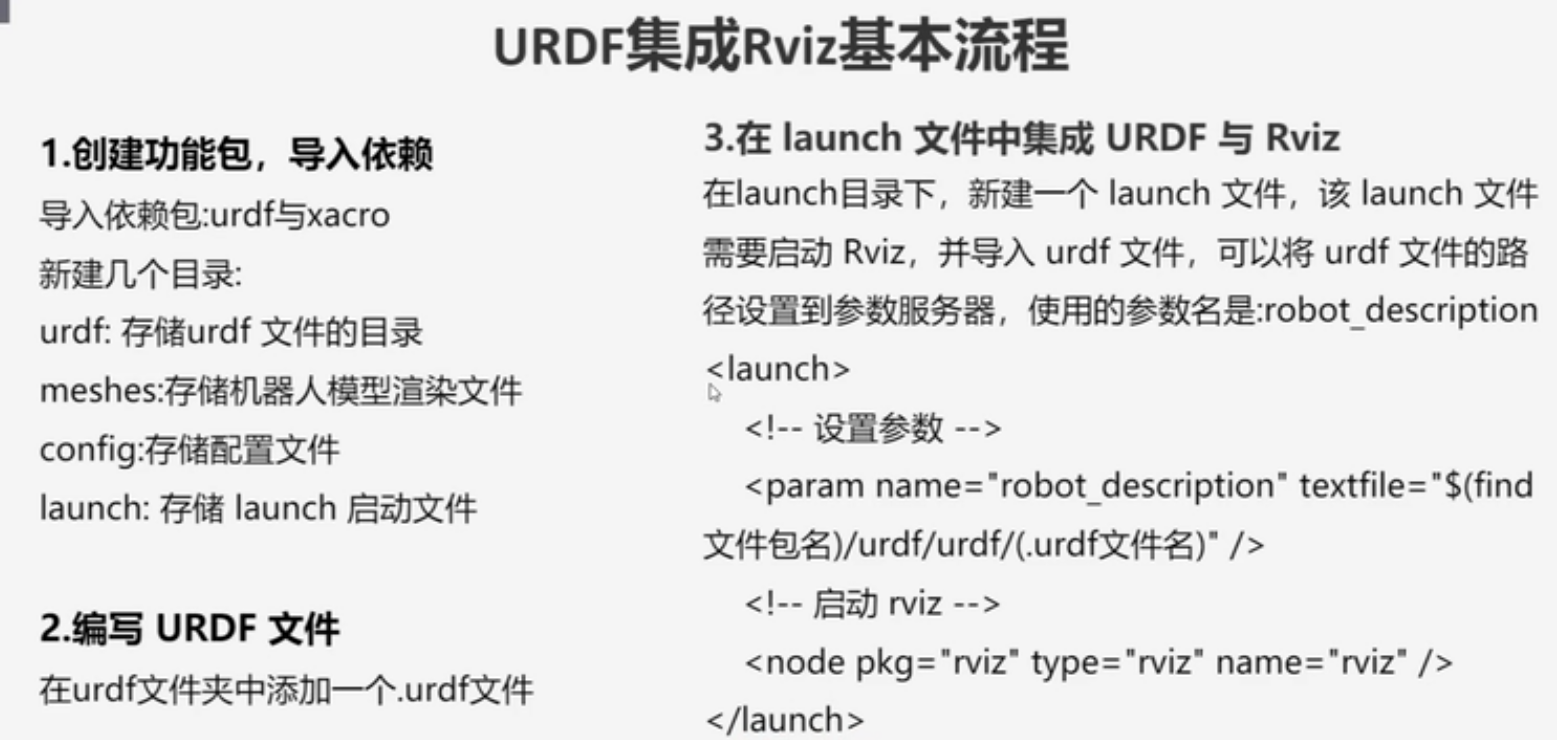
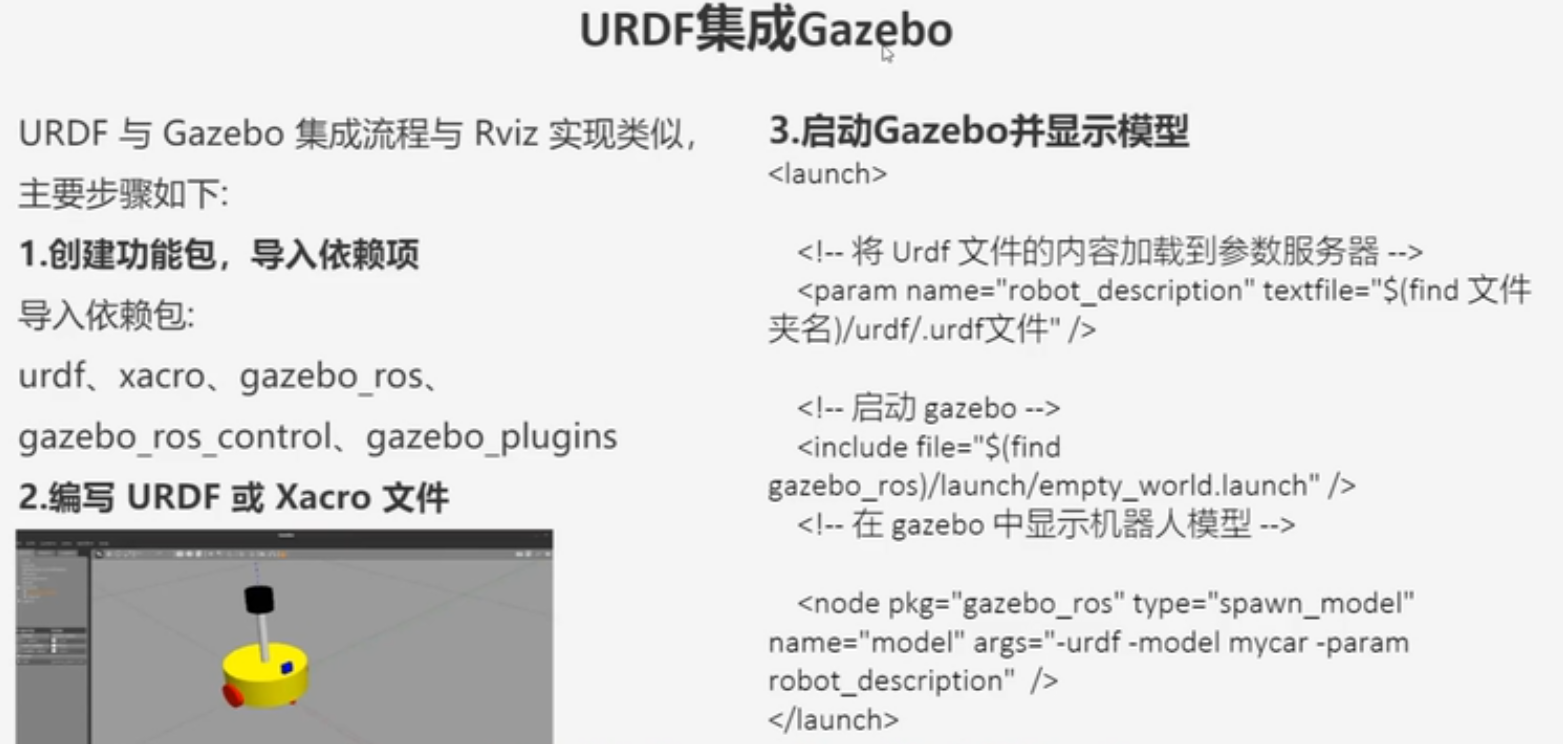
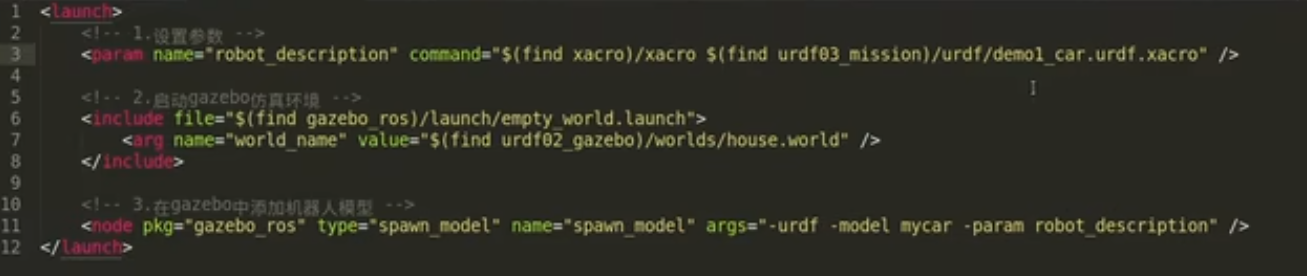
编写launch文件
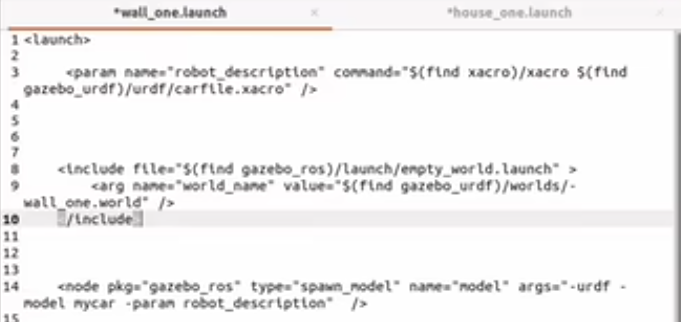
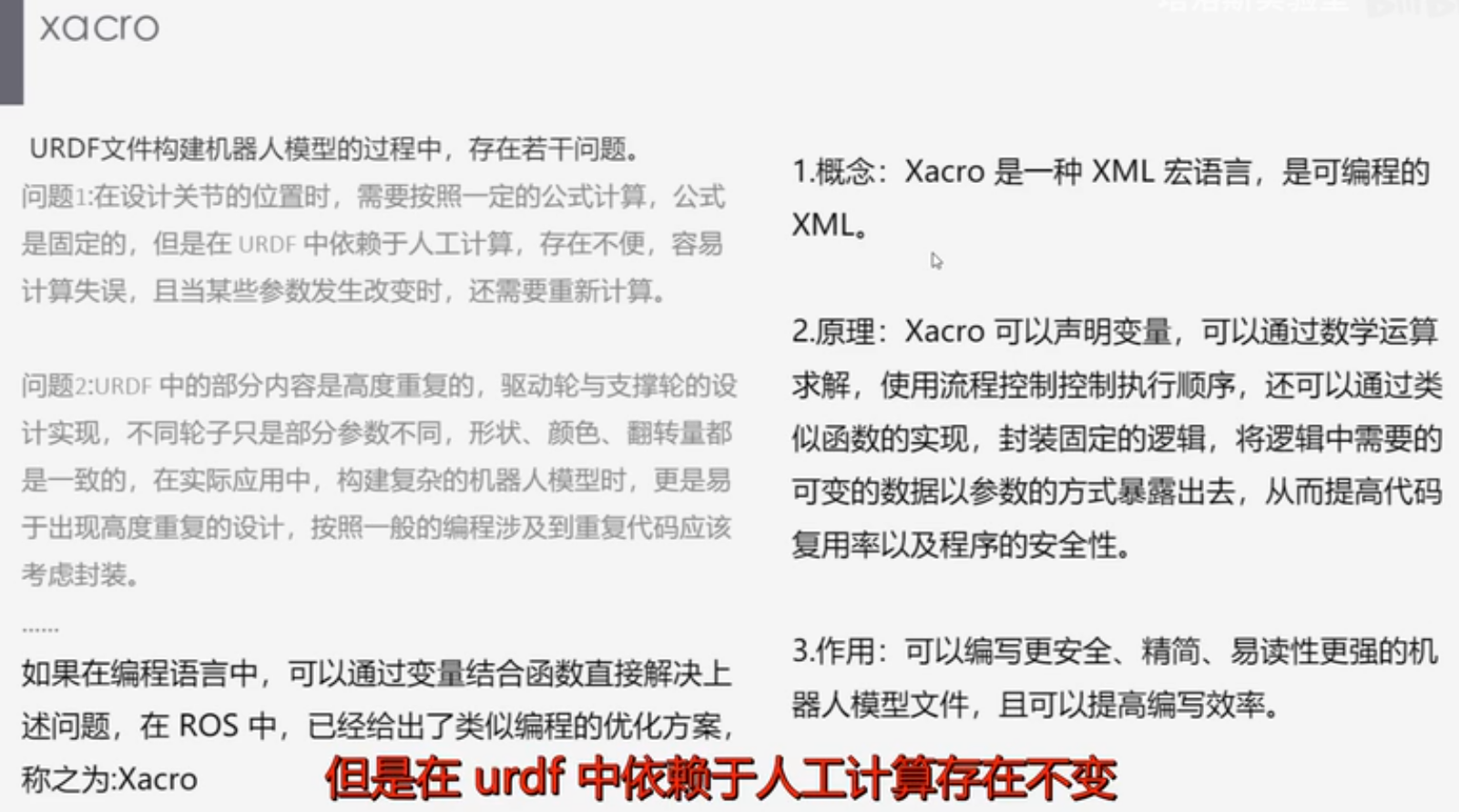
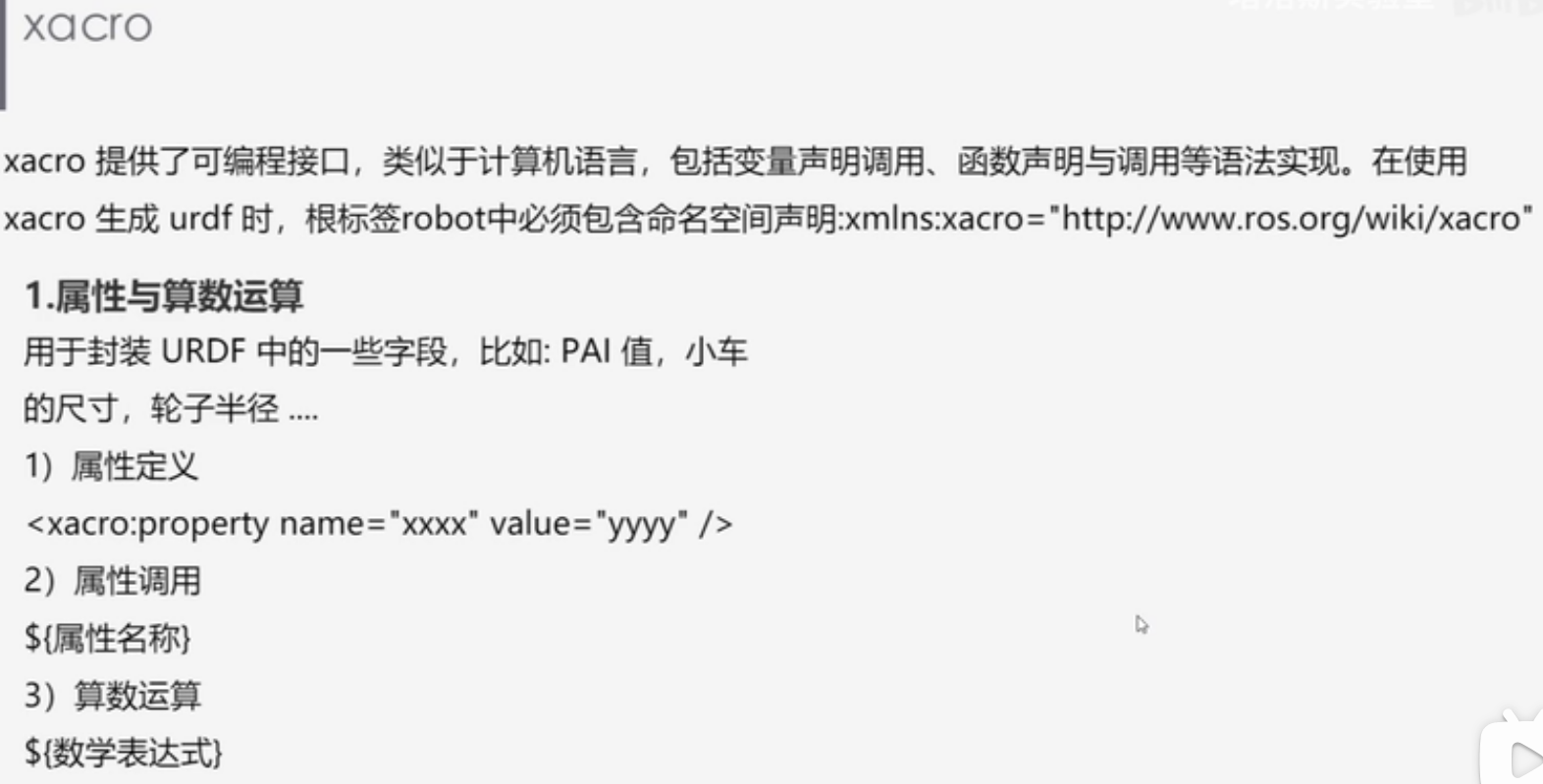
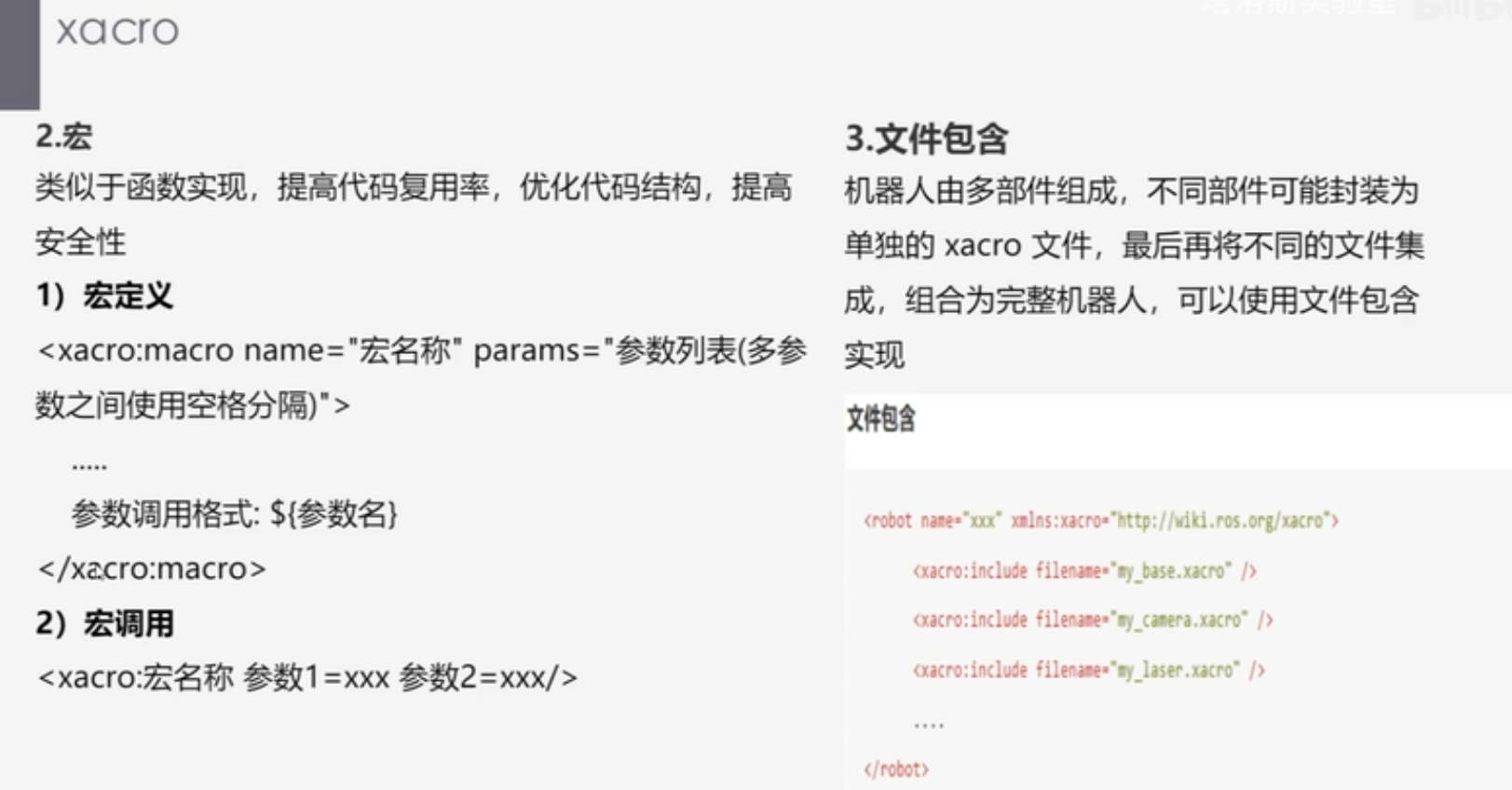
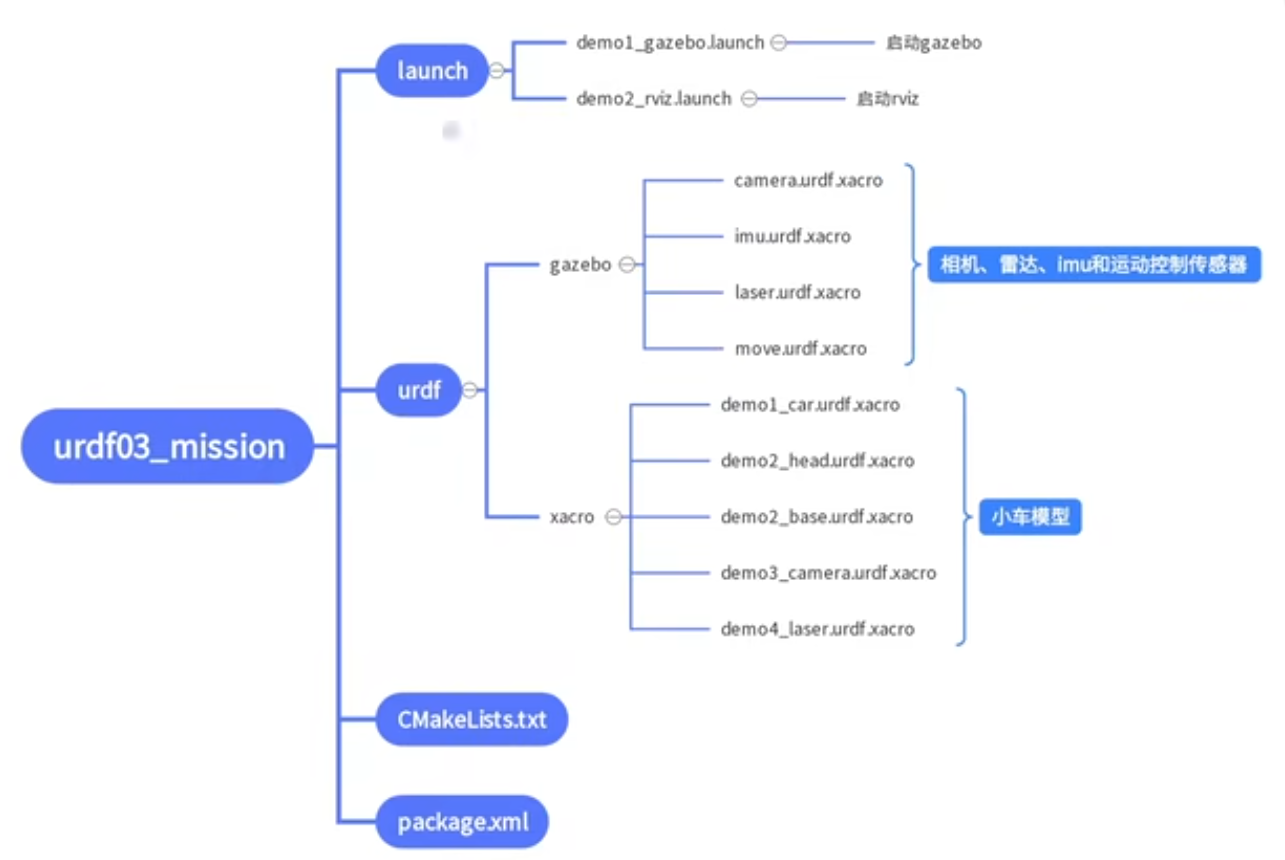
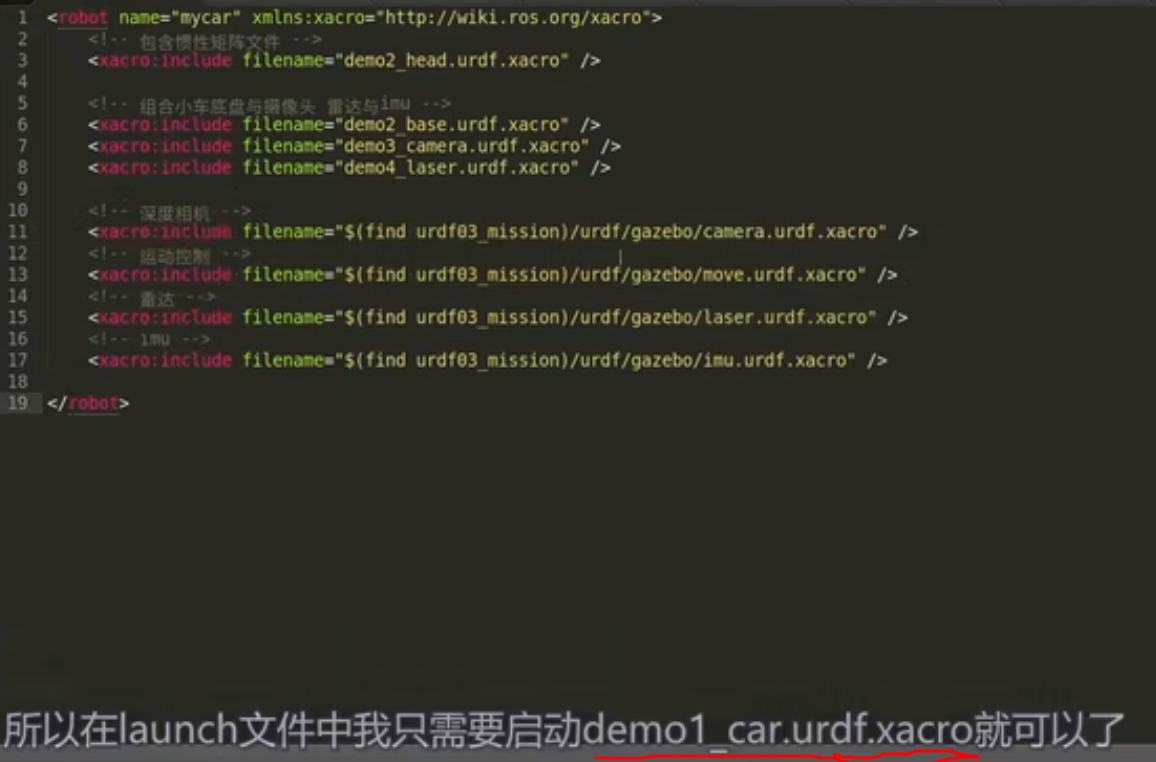
1)xacro文件 机器人模型
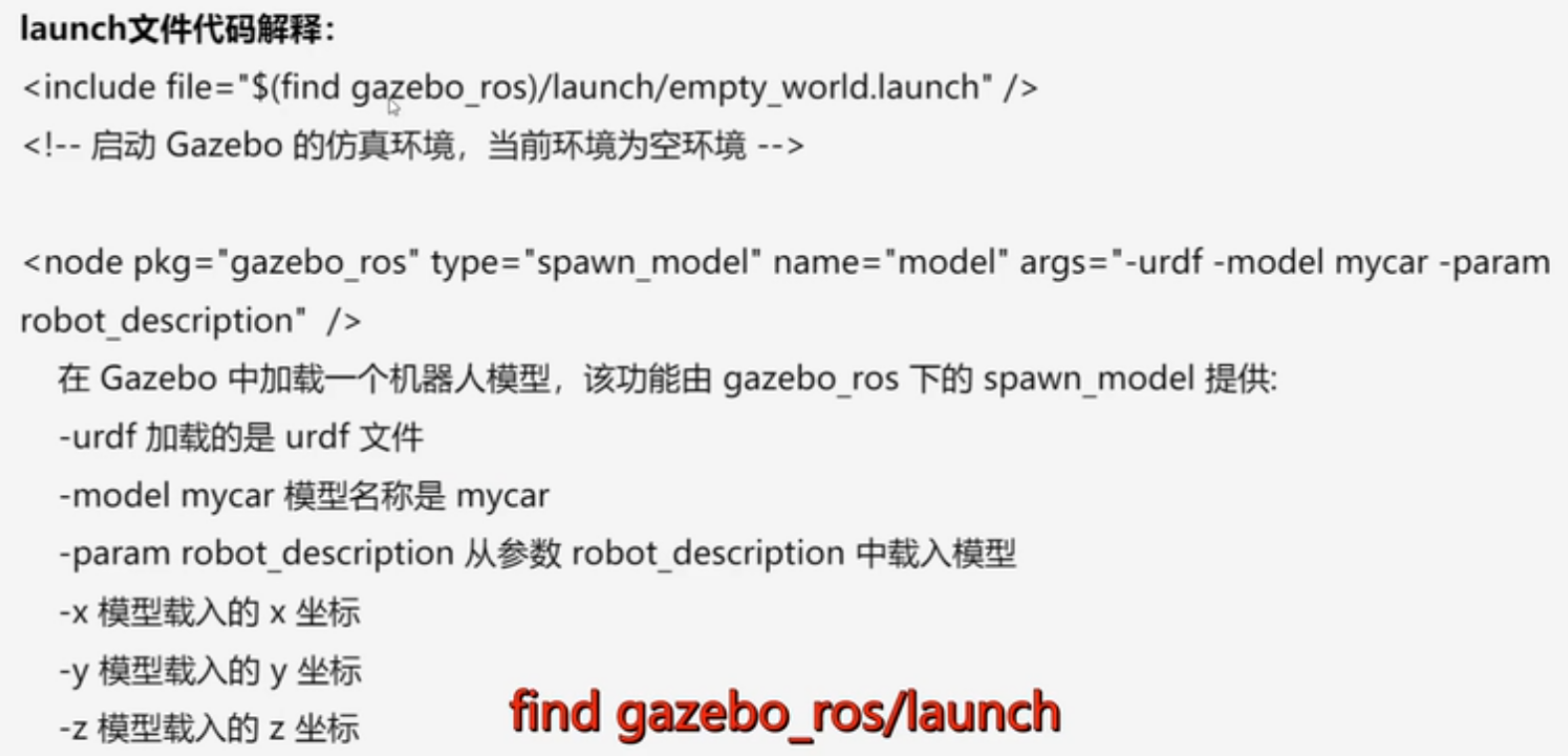
2)加载模型之前,添加empty_world空的世界环境路径,固定格式。然后添加仿真环境。
3)gazebo_ros功能包spawn_model工作节点,通过robot_description参数产生urdf机器人模型
加载搭建的仿真环境
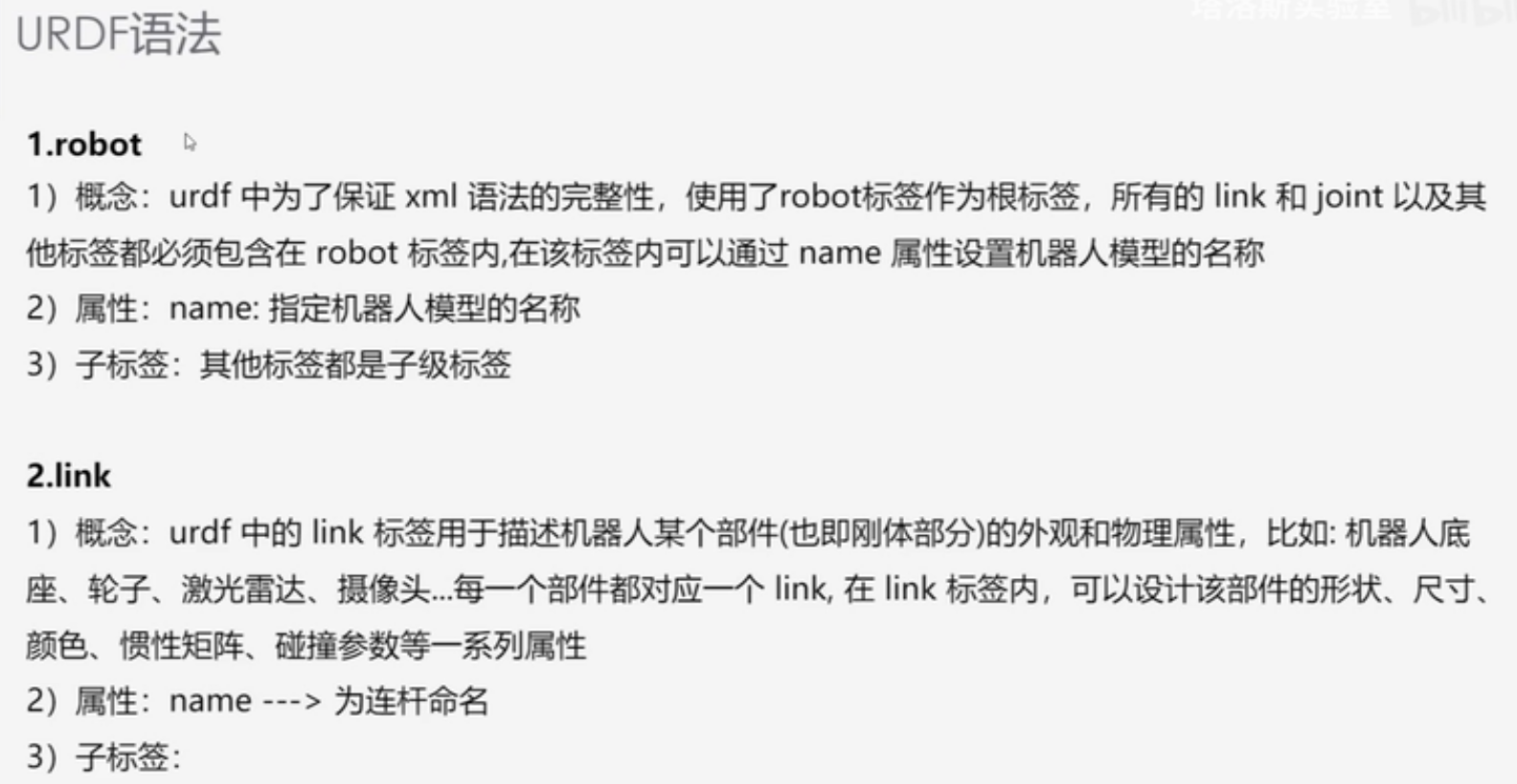
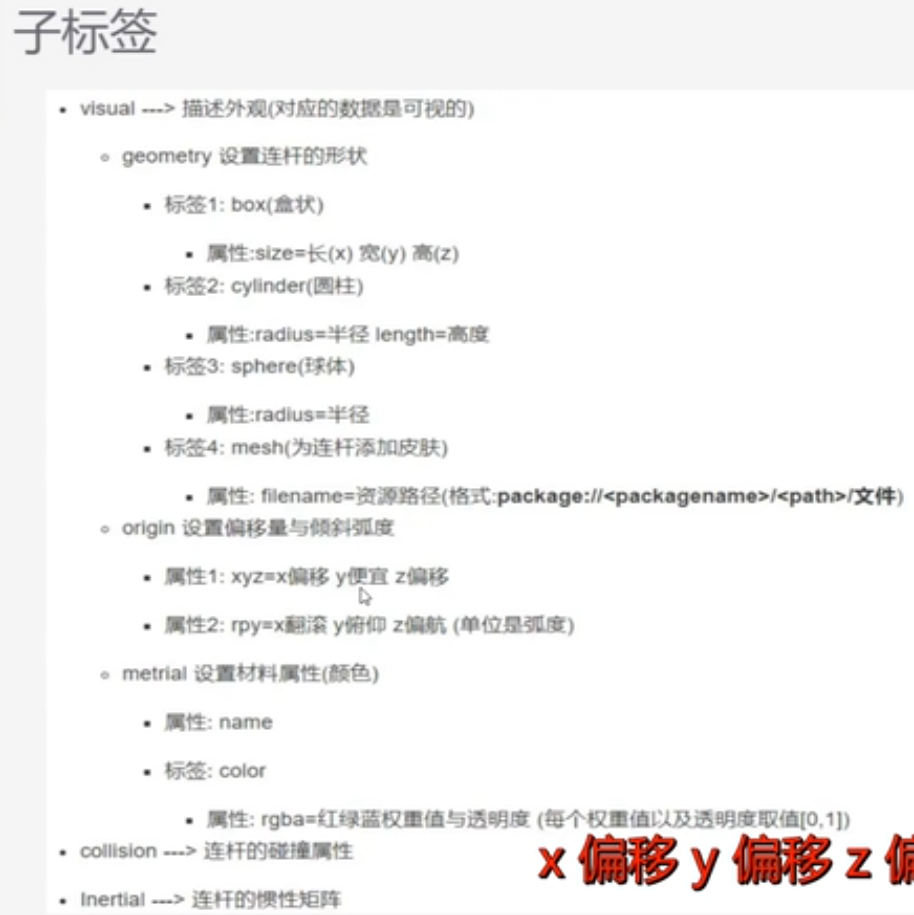
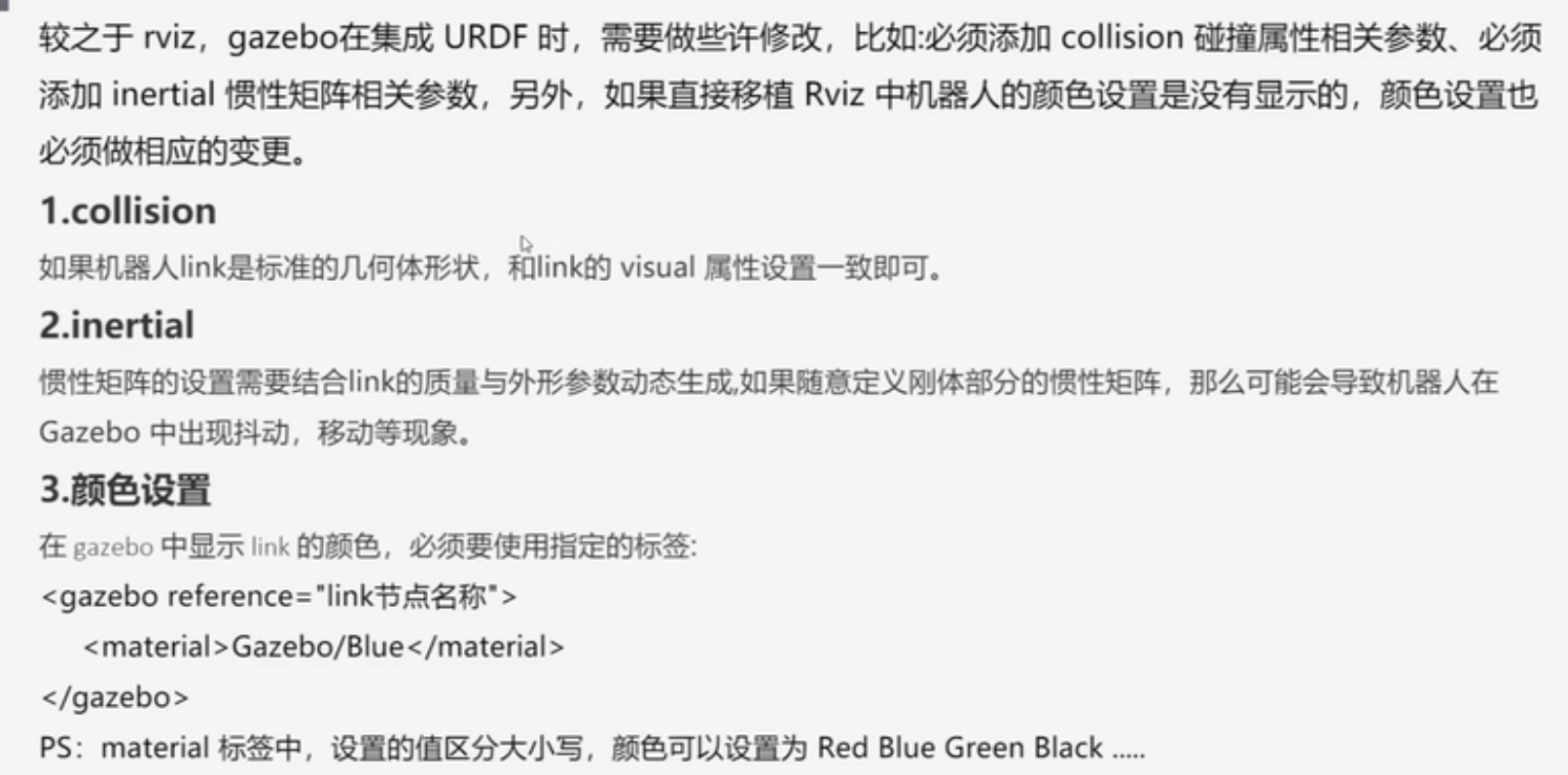
gazebo机器人模型文件的语法





添加传感器
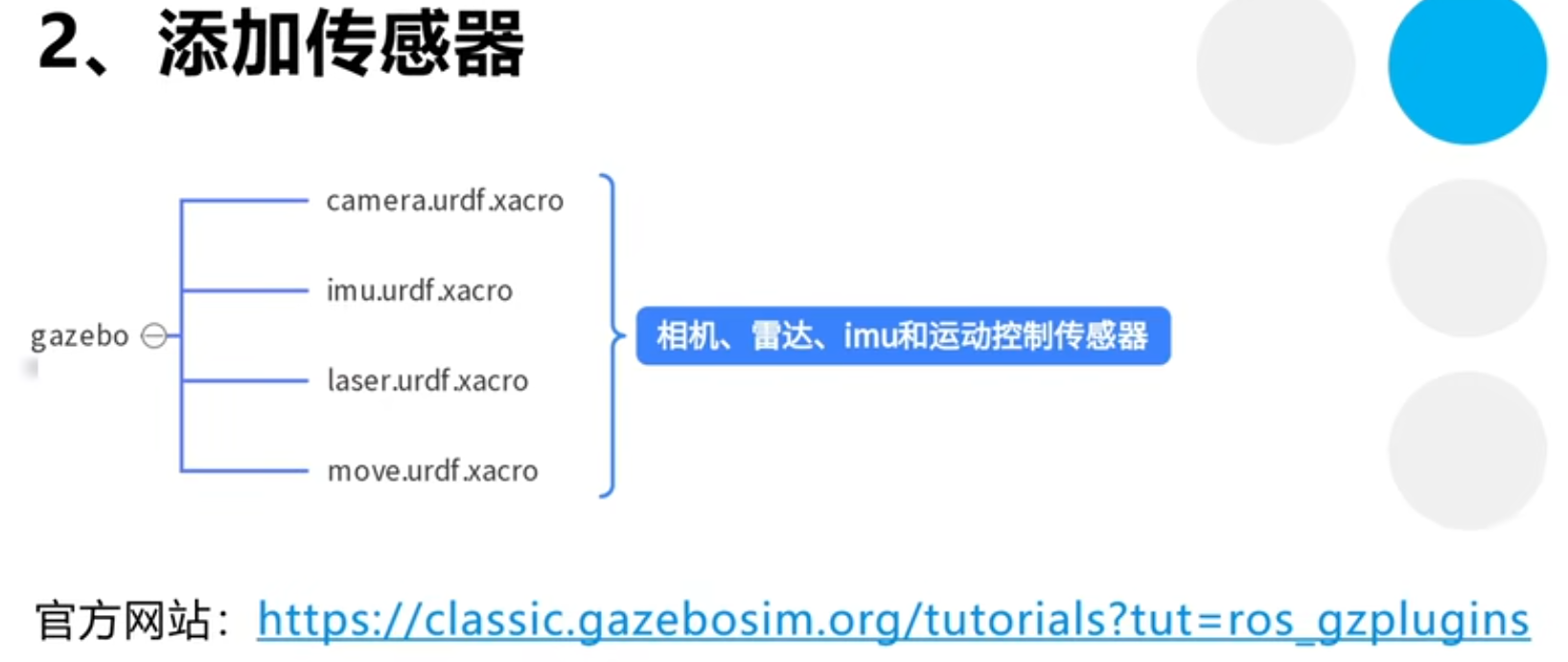
官方有详细实现流程,复制粘贴,修改参数。
https://classic.gazebosim.org/tutorials?tut=ros_gzplugins
Isaac 仿真
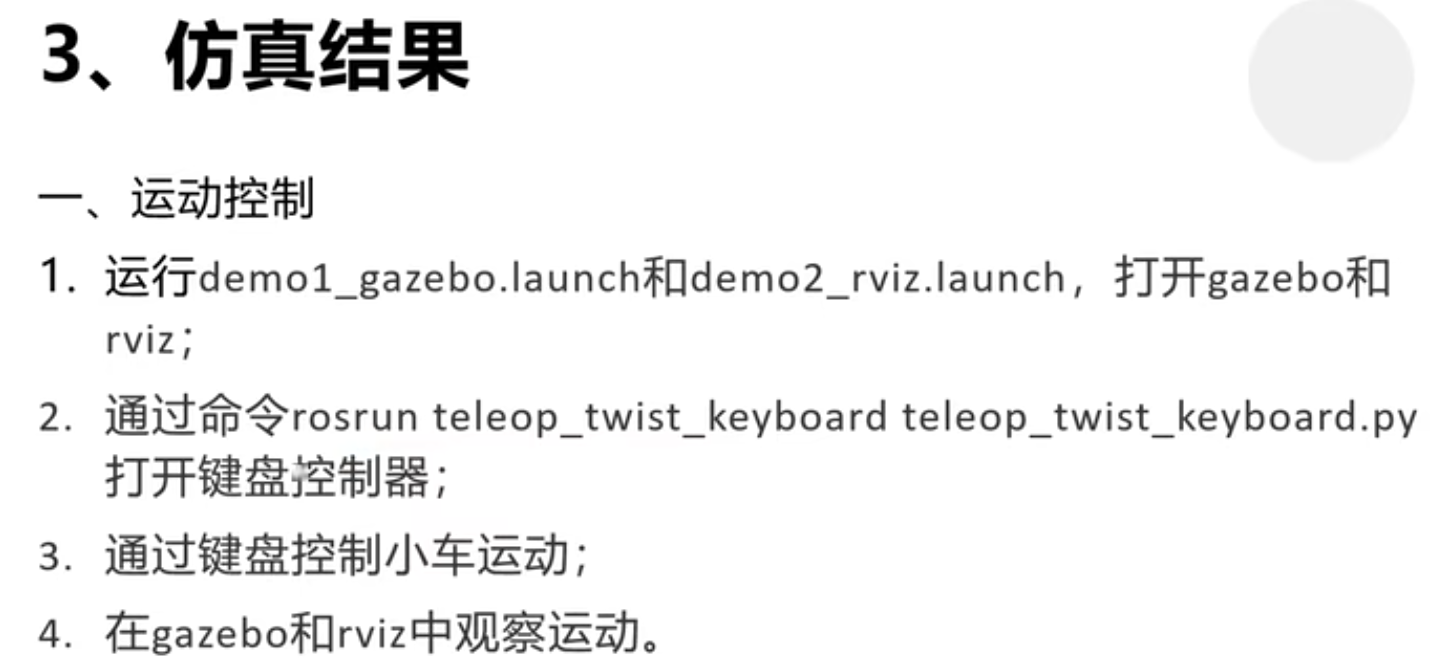
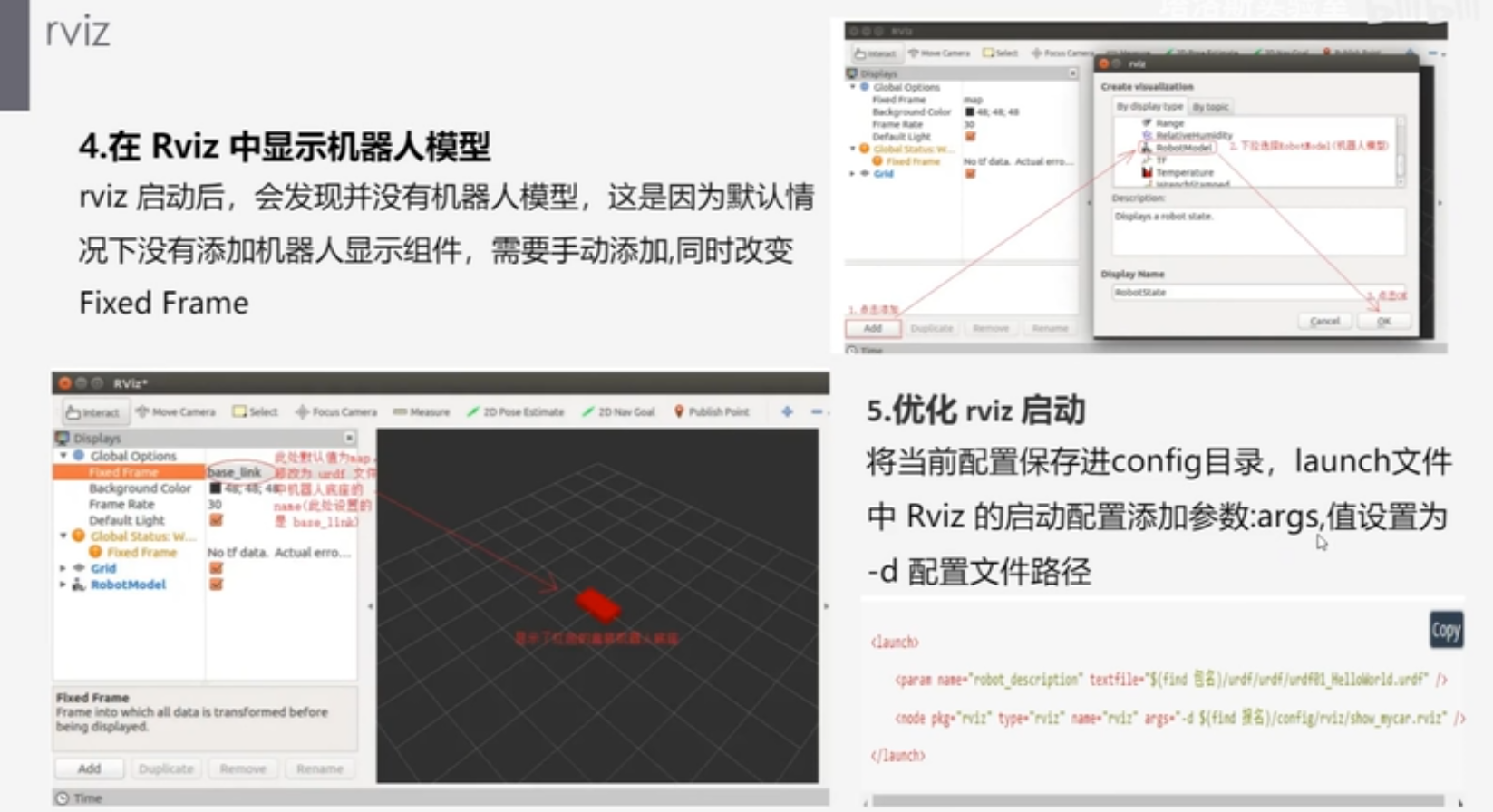
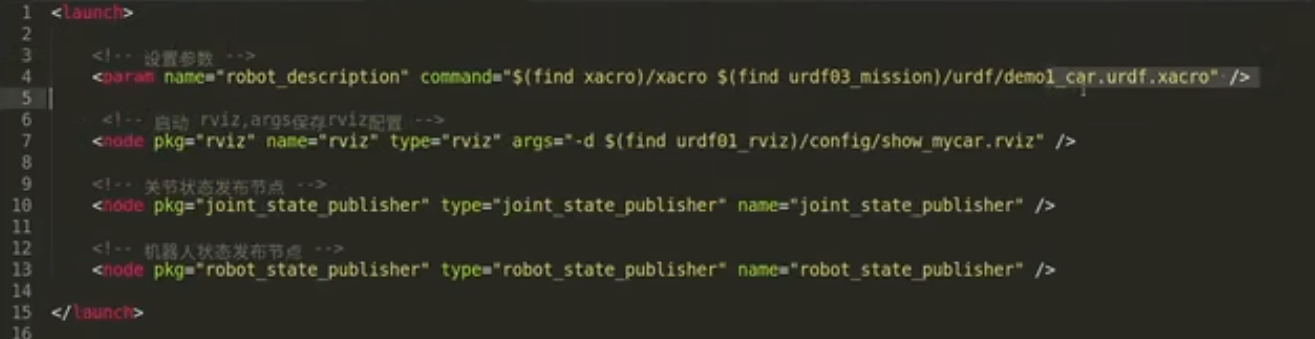
先启动gazebo,再启动rviz。不启动gazebo,rviz是打不开的。
添加控制器
传动装置:速度和扭矩控制接口
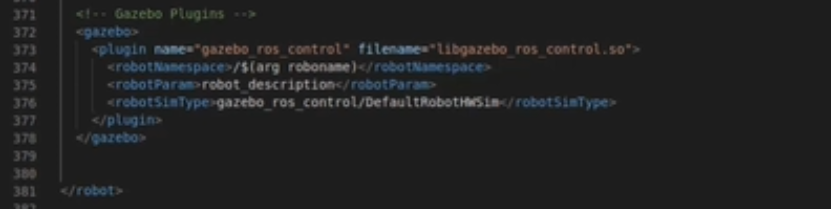
控制器的配置文件yaml
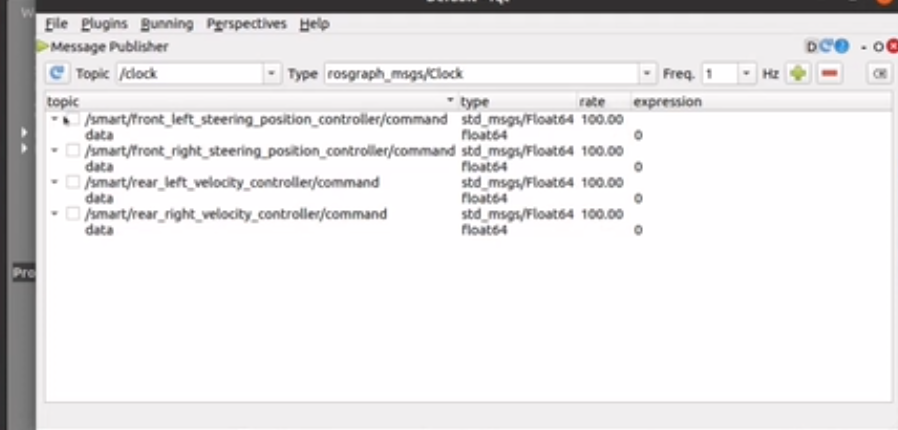
rgt_gui 修改这里的数据可以让小车动。rostopic控制小车