达妙电机卖断货openarm需求强劲-背后关键技术解析
OpenArm 开源机械臂爆火,达妙电机卖断货-背后关键技术解析
一、OpenArm 开源机械臂为何爆火

OpenArm作为一款开源机械臂项目,近期在机器人社区迅速走红,其成功源于精准定位和卓越设计。这款机械臂瞄准了教育、科研和小型自动化场景,提供了完整的开源生态——包括机械结构、控制电路和软件算法,大幅降低了机器人研发门槛。
与此同时,机器人技术平民化的趋势正盛。越来越多的开发者、初创公司甚至高中生都希望接触到实用的机器人技术,而OpenArm恰好满足了这一需求。其模块化设计和详细的文档支持,使得即使没有专业背景的爱好者也能快速上手。
二、OpenArm 为什么选择达妙电机
2.1 优秀的力矩特性
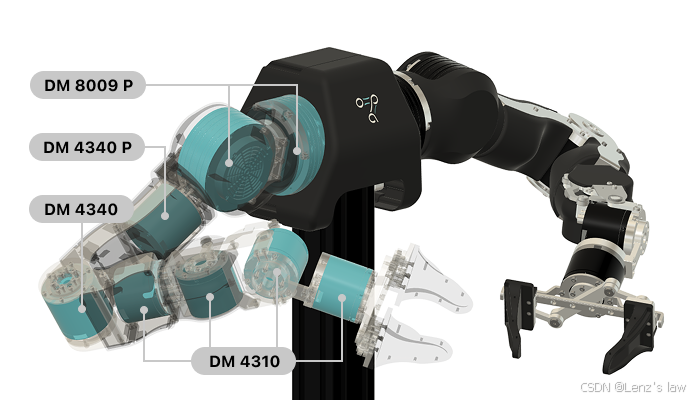
达妙电机提供的高扭矩密度是OpenArm选择它的首要原因。OpenArm 使用 DAMIAO 43 系列和 DAMIAO 8009P 电机。为了有效地实现高负载能力,从肩部到末端执行器的每个关节都选择了不同的电机。为了确保更高的刚度和精度,在单侧支撑的部分使用了配备交叉滚子轴承的电机。虽然 DAMIAO 4340 系列不是 QDD 电机,但它的选择兼顾了高负载能力和简洁紧凑的外观。
机械臂末端执行器的精度直接依赖于关节电机的力矩平稳性。达妙电机采用高性能钕磁铁和优化的电磁设计,确保了从低速到高速全范围内的扭矩输出平稳,无明显转矩脉动,这让OpenArm在执行精密任务时表现出色。
2.2 支持高速CANFD与MIT协议
总线架构的革命性升级
对于典型1KHz控制频率控制单个电机而言,无论是CAN还是CANFD都完全没有问题。但机器人整机架构设计面临的是完全不同的挑战:一条1Mbps CAN2.0总线最多只能1KHz控制3个电机,而CANFD(1M+5M配置)可以1KHz轻松控制6-8个电机。
这一差异对机械臂设计至关重要。7自由度机械臂至少需要7个关节电机,传统CAN总线需要两条独立总线,增加了布线复杂度和控制难度。而单条CANFD总线即可支持完整机械臂,极大简化了系统架构。
MIT协议的专业优势
达妙电机采用的MIT协议相比传统CANopen具有明显优势:
-
高效务实:MIT协议针对现代机器人专门优化,抛弃了CANopen的通用性包袱,协议字段设计充分结合机器人控制需求,在非工业机器人场合是更加务实的方案。
-
集成简单:CANopen协议无论电驱固件端还是Linux主控端都需要协议栈支持,增加了开发和执行开销。而MIT协议简单直接,无需复杂协议栈,极大减轻了系统负担。
-
天然适配CANFD:MIT协议没有严格的历史包袱,更容易利用CANFD的高速和加长帧优势。无论是直接升级速率到CANFD 1M+5M,基于最大64字节CANFD数据域扩展协议字段,还是实现多电机广播协议,MIT都更加灵活。
2.3 极具优势的价格
达妙电机在保证高性能的同时,保持了极具竞争力的价格定位。相比同等性能的进口品牌电机,价格降低30%-50%,这为OpenArm这样的开源项目提供了关键的成本优势。
对于教育市场和科研机构,成本可控意味着可以部署更多的实验平台;对于初创企业,则直接降低了产品研发的门槛。这种高性价比策略,正是达妙电机在开源社区迅速普及的重要原因。
三、关节电机厂家为何需要基于CANFD的MIT控制协议
3.1 技术趋势不可逆转
CANFD正逐渐成为机器人关节通信的新标准。其更高的带宽(从1Mbps提升至5-8Mbps)和更大的数据帧(从8字节提升至64字节)正好满足了现代机器人对多关节同步控制和丰富状态反馈的需求。
3.2 协议选择的战略意义
电机厂家在协议选择上面临关键抉择:是继续沿用成熟的CANopen,还是转向更专用的MIT协议?
CANopen的优势在于标准化和通用性,在传统工业领域有着广泛应用。但其复杂协议栈和升级困难也是不容忽视的问题。
MIT协议的优势在于轻量和专注,它针对机器人控制场景做了深度优化,特别是在支持CANFD方面更加灵活。随着机器人应用场景的多样化,这种专用化协议正显示出越来越强的生命力。
CANopen的可靠性和向后兼容性潜力仍旧不可忽视,CANopen历经数十年工业现场验证所积累的可靠性与成熟的生态系统,以及对后续升级EtherCAT的应用层兼容性,是其无法被迅速取代的深厚根基。未来“双协议支持”或将成为电机厂商兼顾不同市场的务实策略。。
四、帮助电机厂家突破CANFD协议升级难题
4.1 核心工具:可靠的CANFD电机调试工具
工欲善其事,必先利其器。缺乏合适的CANFD调试工具,电机协议研发将寸步难行。专业的CANFD通讯工具主要来自汽车行业巨头,价格高昂,这也是达妙和高擎等厂商选择自研USB-CANFD用于配套电机调试的原因。然而,这种“自力更生”的模式存在天然局限。首先,电机厂家毕竟不是专业的通讯工具厂商,其自研的CANFD工具通常只能满足基本的电机调试需求,在协议兼容性、分析深度和稳定性方面存在天花板。其次,资源分散投入也导致这些工具往往缺乏完善的软件生态和长期的技术支持。
目前市场上已出现专门服务机器人/关节电机厂家的解决方案,成都鲲弘科技的高性能USB-CANFD系列产品覆盖1-6通道CANFD扩展需求,为电机和机器人整机厂家提供了成本适中、性能专业的CANFD接口工具,并已经导入国内多家机器人企业。
4.2 技术背景:专业CANFD技术支持团队
CANFD协议升级不仅需要硬件工具,更需要专业的技术支持团队。从传统CAN到CANFD的过渡涉及物理层调整、通信时序优化、错误处理机制完善等多个技术环节。
建立内部专家团队或与专业方案提供商合作,成为电机厂家顺利实现协议升级的关键。成都鲲弘科技深耕汽车和工业通讯领域多年,致力利用汽车+工业行业积累的技术优势帮助机器人行业客户快速搭建稳定可靠的传输神经网络-CAN/FD和EtherCAT通讯架构。
欢迎访问鲲弘CANFD普及计划开源链接,了解更多相关内容
https://gitee.com/ChengDu-KunHong/cd-kunhong