CVPR 2025论文分享|一种融合世界模型的4D驾驶场景重建框架DriveDreamer4D
本推文介绍了图像处理领域顶级会议CVPR 2025的一篇论文《DriveDreamer4D: World Models Are Effective Data Machines for 4D Driving Scene Representation》。该论文提出DriveDreamer4D框架,该框架通过融合世界模型的先验知识,提升4D驾驶场景表征能力。具体而言,该论文将世界模型用作数据生成工具,合成新轨迹视频,其中显式利用结构化条件来控制交通元素的时空一致性。此外,文中还提出同源数据训练策略(CDTS),以促进真实数据与合成数据的融合,从而优化4DGS模型。DriveDreamer4D是首个将视频生成模型用于改进驾驶场景下4D重建效果的框架。实验结果表明,DriveDreamer4D显著提升了新轨迹视角下的生成质量:与PVG、S3Gaussian和Deformable-GS相比,FID指标相对提升分别为32.1%、46.4%和16.3%。此外,DriveDreamer4D大幅增强了驾驶智能体(如车辆、行人)的时空一致性,这一点通过全面的用户研究以及新轨迹智能体交并比(NTA-IoU)指标分别提升22.6%、43.5%和15.6%得到验证。
本推文由邓镝撰写,审核为韩煦。
原文链接:https://arxiv.org/abs/2410.13571
项目链接:https://drivedreamer4d.github.io/
演示视频:

演示视频 1 基线方法PVG与DriveDreamer4D的生成效果比较

演示视频 2 基线方法S3Gaussian与DriveDreamer4D的生成效果比较
演示视频 3 基线方法Deformable-GS与DriveDreamer4D的生成效果比较
一、研究方法研究背景与主要贡献
端到端规划(即将传感器输入直接映射为控制信号)是自动驾驶领域中最关键且最具前景的任务之一。然而,当前的开环评估无法准确评估端到端规划算法,因此需要更优的评估方法。一种引人注目的解决方案是在真实场景中进行闭环评估,这需要从任意指定视角获取传感器数据。这就要求构建能够重建复杂动态驾驶环境的4D驾驶场景表征模型。驾驶环境中的闭环仿真主要依赖于场景重建技术,如神经辐射场和3D高斯泼溅(3DGS),但这些技术本质上受限于输入数据的密度,在复杂机动动作中难以实现准确渲染。为缓解这一局限性,SGD和GGS等方法利用生成模型扩展训练视角范围,但这些方法主要补充稀疏图像数据或静态背景元素,无法对动态交互驾驶场景的细节进行建模。近年来,自动驾驶世界模型已经能够生成多样化、且与指令对齐的视频视角,这一进展为自动驾驶闭环仿真带来新的可能。然而,这些模型仍局限于2D视频生成,缺乏准确建模复杂驾驶场景所需的时空一致性。
该论文提出DriveDreamer4D框架,通过融合自动驾驶世界模型的先验知识,改进4D驾驶场景表征。该研究将自动驾驶世界模型用作生成引擎,合成新轨迹视频数据,以丰富真实驾驶数据集,从而提升训练效果。论文中提出的新轨迹生成模块(Novel Trajectory Genera-
tion Module,NTGM),用于生成多样化的结构化交通条件;DriveDreamer4D利用这些条件,独立调控复杂驾驶环境中前景与背景元素的运动动态。这些条件会与车辆机动动作同步进行视角投影,确保合成数据符合时空约束。随后,文中还提出同源数据训练策略(Cousin Data Training Strategy,CDTS),将时间对齐的真实数据与合成数据融合,用于训练4DGS模型。在CDTS中,进一步引入正则化损失,以确保感知一致性。
论文的主要贡献如下:
(1)提出DriveDreamer4D框架,这是首个融合世界模型先验知识以推进自动驾驶4D场景重建的框架;
(2)提出新轨迹生成模块,实现结构化条件的自动生成,使DriveDreamer4D能够生成包含复杂机动动作的新颖轨迹视频,同时保证时空一致性;此外,提出同源数据训练策略,将时间对齐的真实数据与合成数据融合用于4DGS训练,并通过正则化损失维持感知一致性;
(3)通过全面实验验证,DriveDreamer4D 显著提升了新颖轨迹视角下的生成质量,以及驾驶场景元素的时空一致性。
二、研究方法
DriveDreamer4D的整体流程如图2所示。在上半部分,提出的新轨迹生成模块通过调整驾驶动作(如转向角、速度)生成新轨迹。这些新轨迹为提取3D边界框、高清地图等结构化信息提供新视角。随后,可控视频扩散模型根据这些更新后的视角合成视频,并融入与修改后轨迹相关的特定先验知识。在下半部分,提出的同源数据训练策略将时间对齐的真实数据与生成数据融合,用于优化4DGS模型,并通过计算正则化损失确保感知一致性。下文将详细阐述新颖轨迹视频生成和4D重建的CDTS策略。
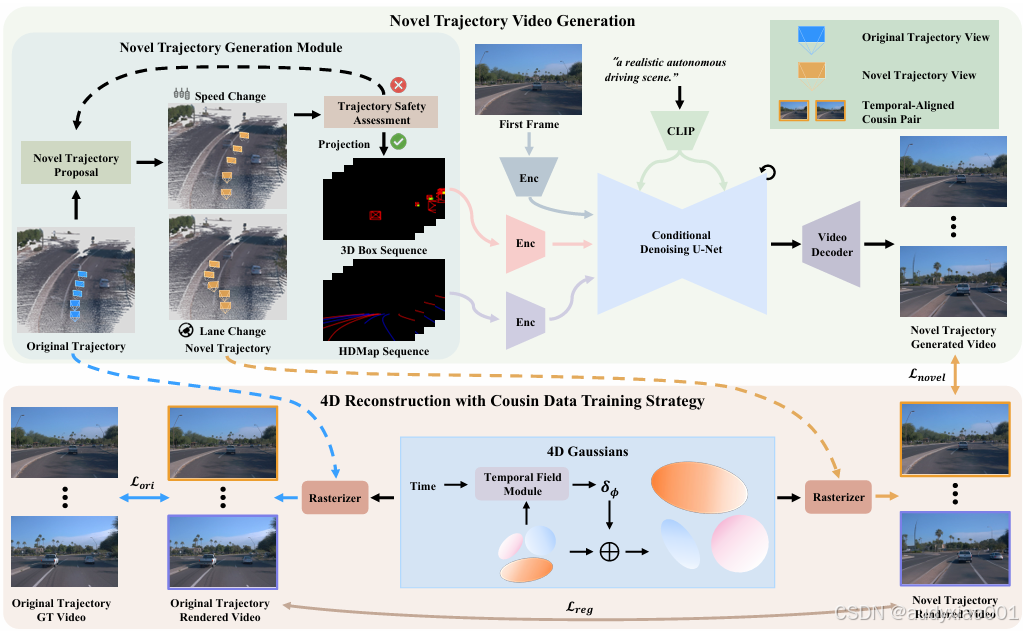
图 1 DriveDreamer4D的整体框架。首先,通过改变原始轨迹的动作(如转向角、速度),可得到新轨迹。以第一帧图像以及新轨迹中的结构化信息(3D边界框、高清地图)为条件,生成新轨迹视频。随后,将时间对齐的同源数据对(原始轨迹视频与新颖轨迹视频)进行融合,用于优化4D高斯泼溅模型;在此过程中,会计算正则化损失以确保感知一致性。
2.1 新轨迹视频生成
如前所述,传统4DGS方法在渲染复杂机动动作时存在局限性,这在很大程度上是因为训练数据以简单驾驶场景为主。为解决这一问题,DriveDreamer4D利用世界模型的先验知识生成多样化视角数据,提升4D场景表征能力。NTGM模块生成的新轨迹作为世界模型的输入,从而实现复杂机动动作数据的自动生成。
NTGM包含两个核心组件:(1)新颖轨迹生成;(2)轨迹安全性评估。在新颖轨迹生成阶段,可采用从文本到轨迹的方法自动生成多样化的复杂轨迹;此外,还可根据特定需求自定义轨迹,实现定制化数据生成。
为生成新轨迹,首先将原始轨迹通过计算转换到第一帧的自车坐标系中。在自车坐标系中,车辆航向与x轴正方向对齐,y轴指向车辆左侧,z轴垂直向上(与车辆平面垂直)。因此,可通过调整x轴和y轴方向的数值,分别表示车辆速度和方向的变化。对新生成的轨迹点需进行安全性评估,包括:验证车辆轨迹是否位于可行驶区域内,以及确保与行人或其他车辆无碰撞。一旦生成符合交通规则的新轨迹,即可将道路结构和3D边界框从新轨迹的视角投影到相机视图中,生成与更新后轨迹相关的结构化信息。将这些结构化信息与初始帧、文本信息一同输入世界模型,即可生成符合新轨迹的视频。
2.2 同源数据训练策略
为更好地融合生成数据用于4DGS训练,文中提出CDTS策略。具体而言,构建时间对齐的同源数据对作为最小训练批次。通过数据处理器BatchStack将时间对齐的真实轨迹视频帧和新轨迹视频帧堆叠为训练批次。通过利用每个时间步对齐的真实数据与合成数据,CDTS缓解了4DGS训练中的数据缺口,提升模型学习真实与合成数据一致表征的能力。在优化4DGS时,每个梯度优化步骤前均输入时间对齐的同源数据对。值得注意的是,在使用生成数据集优化4DGS时,不将深度图作为约束,这是因为激光雷达点云数据仅针对原始轨迹采集,当这些点云投影到新轨迹时,无法为新视角生成完整的深度图(新轨迹中可见的物体可能在原始视角中被遮挡),因此融入此类深度图不利于4DGS模型优化。
三、实验
3.1 实验设置
(1)数据集
实验采用Waymo数据集,该数据集包含丰富的真实驾驶日志,但多数日志记录的场景动态性较简单,缺乏密集复杂的车辆交互场景。为弥补这一缺口,文中专门选择8个具有高动态交互特性的场景,这些场景包含大量车辆,且车辆相对位置多样、驾驶轨迹复杂。
(2)实现细节
为验证DriveDreamer4D的通用性和鲁棒性,文中将多种4DGS基线方法集成到框架中,包括Deformable-GS、S3Gaussian和PVG。为保证对比公平性,为Deformable-GS引入激光雷达监督。训练时,将场景分割为多个片段,每个片段包含40帧(与生成模型的输出长度一致)。仅使用前视相机数据,并将所有方法的分辨率统一为640×960。模型采用Adam优化器训练,学习率调度遵循3D高斯泼溅的设置。超参数设置与各基线方法保持一致,训练策略除集成CDTS外无其他差异。
(3)评估指标
传统3D重建任务通常采用峰值信噪比(PSNR)和结构相似性(SSIM)作为评估指标,且验证集与训练数据分布高度匹配(即从视频序列中均匀采样帧作为验证集,其余作为训练集)。然而,在驾驶闭环仿真中,评估重点转向模型在新颖轨迹下的渲染性能,此时无对应的传感器数据,因此PSNR和SSIM等指标不再适用。为此,文中提出“新轨迹智能体交并比(NTA-IoU)”和“新轨迹车道交并比(NTL-IoU)”,用于评估新颖轨迹视角下前景和背景交通组件的时空一致性。
对于NTA-IoU:使用YOLO11检测新轨迹渲染图像中的车辆,得到2D边界框;同时,对原始3D边界框进行几何变换,投影到新视角中,生成对应的2D边界框。对于每个投影的2D边界框,找到距离最近的检测2D边界框,计算二者的交并比(IoU)。
对于NTL-IoU:使用TwinLiteNet从渲染图像中提取2D车道线;同时,将真实车道线投影到2D图像平面;计算渲染车道线与真实投影车道线的平均交并比(mIoU)。
此外,在变道场景中,相对位置不准确以及“飞点”“重影”等伪影频繁出现,这些问题显著降低图像质量。为评估这一现象,采用FID指标,该指标量化新颖轨迹渲染图像与原始轨迹图像的特征分布差异,能有效反映视觉质量,且对“飞点”“重影”等伪影敏感,为复杂场景下的图像保真度提供可靠度量。
最后,通过用户研究评估渲染质量:参与者需在三种新颖轨迹下,将每种基线方法的渲染结果与其对应的DriveDreamer4D增强结果进行对比,评估标准聚焦于整体视频质量(尤其关注车辆等前景物体),并选择更优结果。
3.2 与不同4DGS基线方法的对比
(1)定量结果
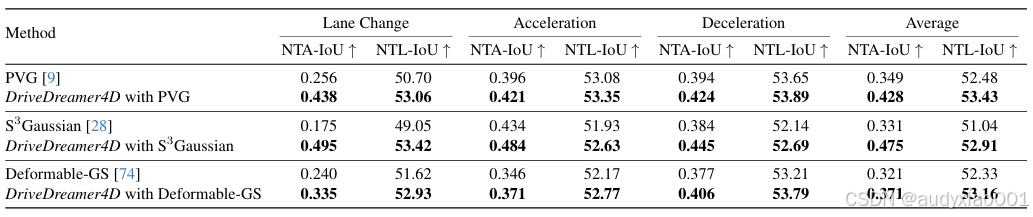
如表1所示,将DriveDreamer4D与不同4DGS算法集成后,在变道、加速、减速等多种复杂机动动作中,NTA-IoU和NTL-IoU得分均持续优于基线方法。具体而言,DriveDreamer4D使三种基线方法(PVG、S3Gaussian、Deformable-GS)的平均NTA-IoU分别相对提升22.6%、43.5%和15.6%,凸显了提升前景智能体时空一致性的能力;同时,三种基线方法的平均NTL-IoU分别相对提升1.8%、3.7%和1.6%,显著增强了驾驶场景4D渲染中背景车道线的时空一致性。
表 1 不同新颖轨迹视角(变道、加速、减速)下NTA-IoU和NTL-IoU得分对比
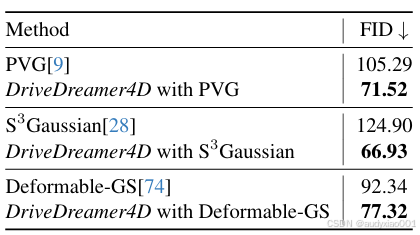
除验证新颖轨迹渲染的时空一致性外,文中还利用FID指标评估新颖轨迹下的渲染质量。由于加速和减速场景的渲染视角与真实分布相似度较高,FID对算法的区分能力有限,因此FID对比仅聚焦于变道场景。如表2所示,DriveDreamer4D显著优于三种基线方法,FID相对提升分别为32.1%、46.4%和16.3%,证明其提升新颖轨迹视角生成质量的能力。
表 2 Waymo数据集上新轨迹(变道)视图合成的FID得分对比(数值越低越好)
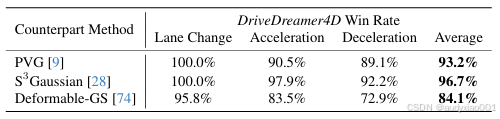
最后,通过用户研究评估不同方法在新轨迹下的渲染质量(重点关注前景智能体)。对于每种方法,在Waymo数据集的8个场景中,生成三种新颖轨迹(变道、加速、减速)的视图;参与者需在每次对比中选择视觉效果更优的渲染结果。如表3所示,DriveDreamer4D的优选率显著高于基线方法。
表 3 不同新颖轨迹视图合成中DriveDreamer4D的优选率
(2)定性结果
除定量对比外,还对新轨迹视图渲染进行定性分析。如图3所示,展示了变道场景下的新轨迹视图合成结果:基线算法渲染的图像中,前景车辆随相机运动同步错误变道,部分车辆渲染不完整,背景存在“斑点”和“重影”;尤其在图3最右侧列,基线算法常出现前景车辆模糊重影、天空背景斑点以及车道线模糊等问题。相比之下,DriveDreamer4D显著提升了渲染质量(橙色框标注部分):车辆轮廓更清晰,背景伪影大幅减少。
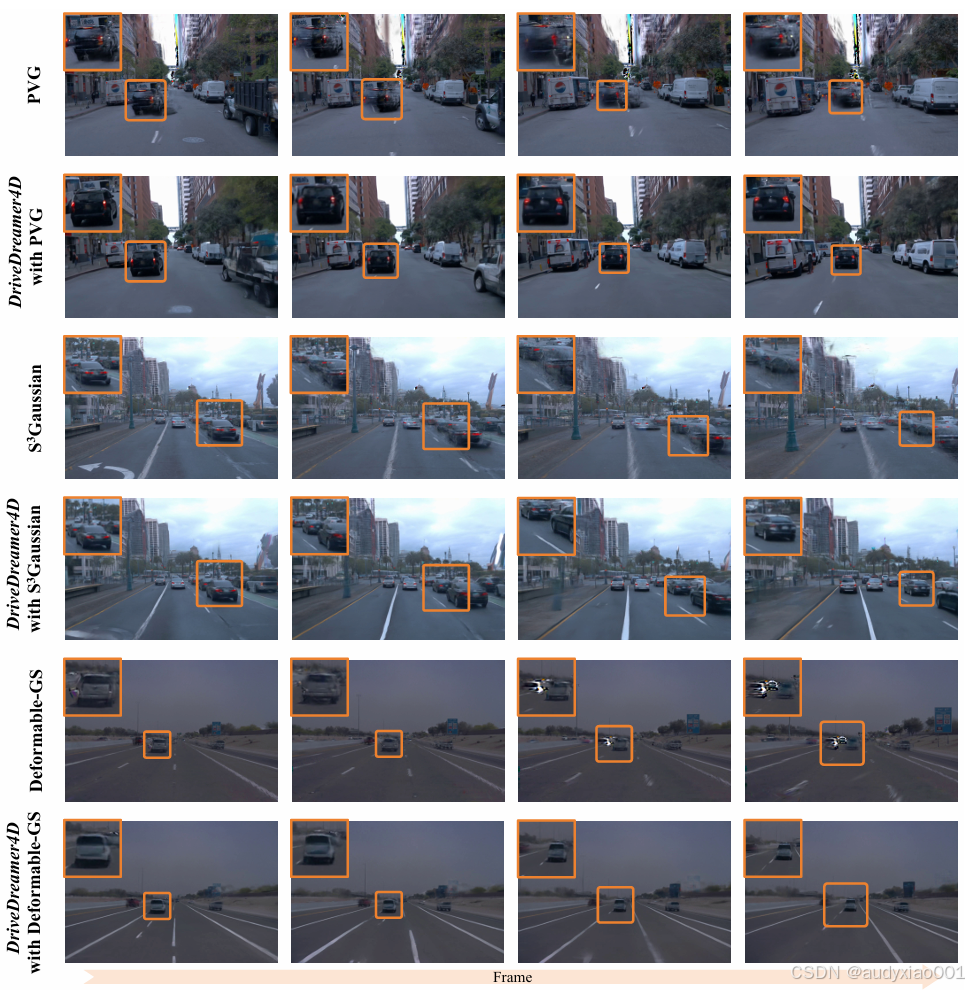
图 2 变道场景下新颖轨迹渲染结果的定性对比。橙色框突出显示:在多种基线方法上,DriveDreamer4D均显著提升了渲染质量。
四、总结
该论文提出DriveDreamer4D框架,通过融合世界模型的先验知识,推进4D驾驶场景表征研究。针对当前传感器仿真方法的关键局限性:依赖直行驾驶训练数据分布、无法建模复杂机动动作,DriveDreamer4D利用世界模型生成新颖轨迹视频,补充真实驾驶数据;通过显式利用结构化条件,该框架维持了交通元素的时空一致性,确保生成数据符合真实驾驶场景的动态特性。实验表明,DriveDreamer4D在生成多样化仿真视角方面实现了更优质量,显著提升了渲染保真度和场景组件的时空一致性。这些结果证明,DriveDreamer4D有望成为闭环仿真的基础,为动态驾驶场景的高保真重建提供支持。